(54) СХВАТ ДЛЯ СБОРКИ РАДИОДЕТАЛЕЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват для сборки деталей | 1983 |
|
SU1127738A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Схват манипулятора | 1987 |
|
SU1492495A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1701517A1 |
| Устройство для монтажа радиодеталей на печатную плату | 1985 |
|
SU1412027A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Схват манипулятора | 1977 |
|
SU633726A1 |
| МАНИПУЛЯТОР ВИННИКОВА И.К. | 1995 |
|
RU2097965C1 |
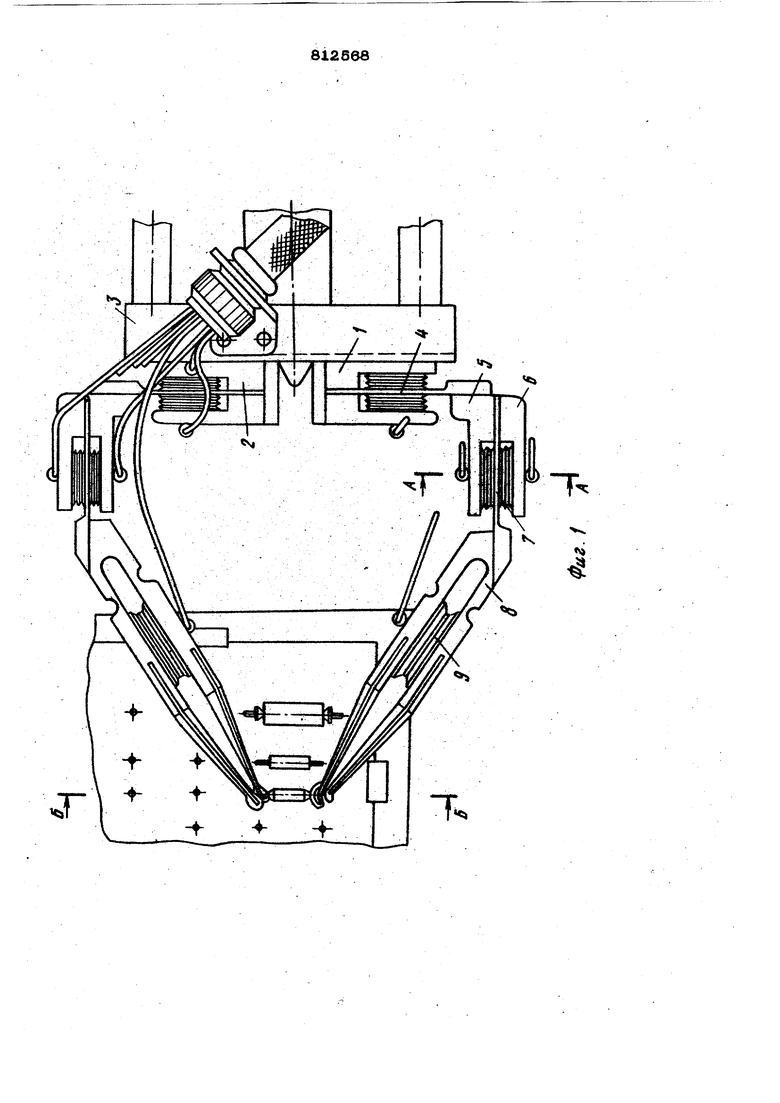
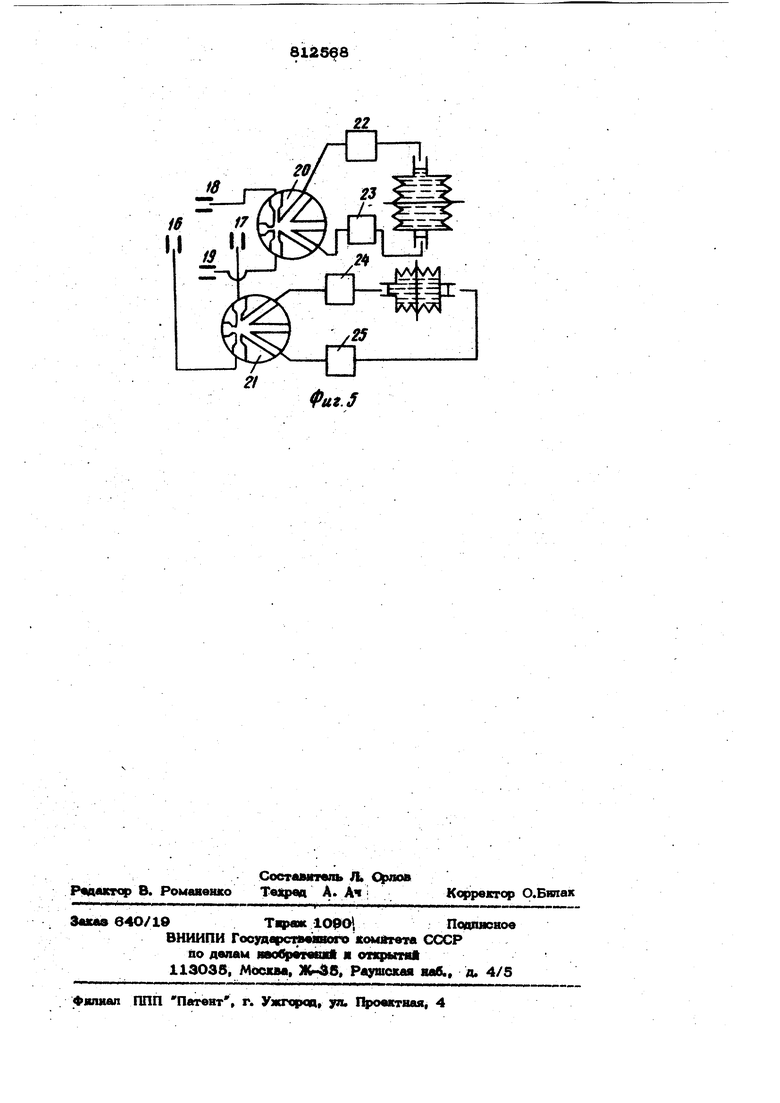
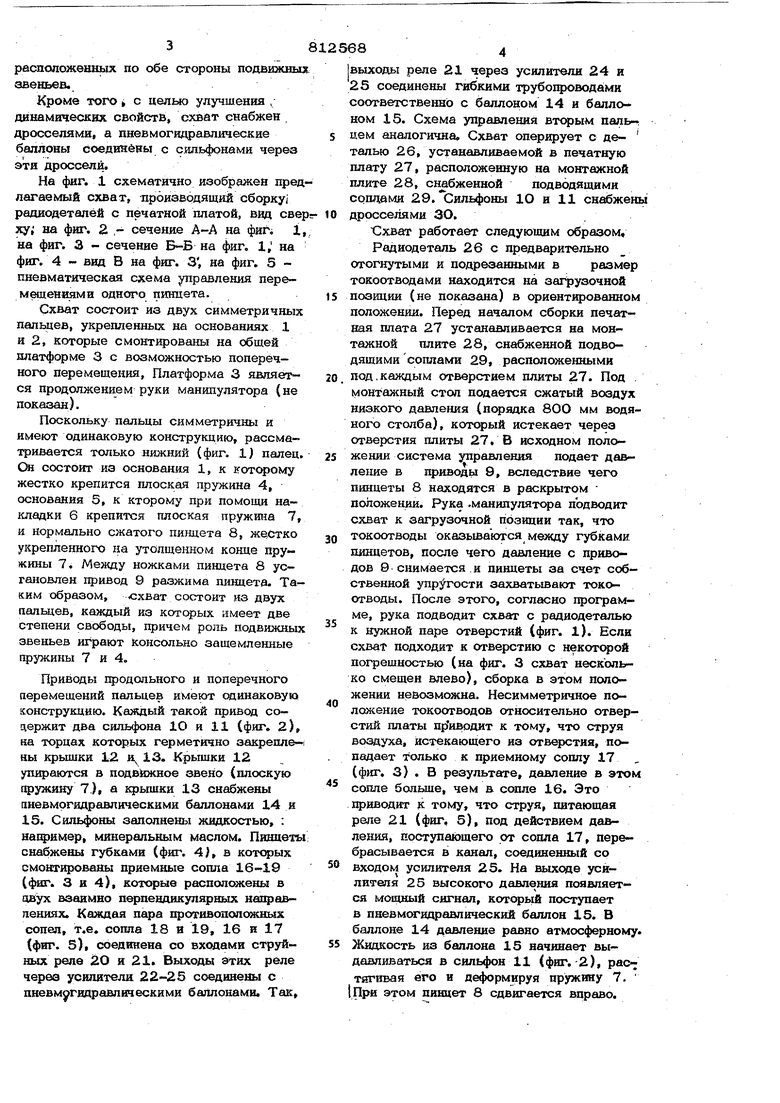
Изобретение относится к автоматизации сборочньос работ, в частности к автоматизации радиодеталей с платой печатного монтажа с помощью манипулятора Известен схват, содержащий подвижны звенья, приводы поперечноЪо и. продольног перемещения и элементы адаптации. В качестве устройства охвата использована телевизионная камера. С помсхиью телевизионной камеры информация .о положении детали передается в управляющую мащину, которая определяет координаты осей собираемых деталей и выр атывает команды на совмещение их. Точность позиционирования схвата„здесь может быть значительно меныие точности сопрЯч жения IJ., Недостатками известного схвата являются сложность конструкции и болыи 1я масса схвата, большой объем избыточной информации, поступающей в вычислительную машину от телекамеры и, как следствие, большой объем памяти Данный схват не может осуществить сборку радиодетали, если-межрсевре расстояние ее токоотводов . больше шш меныие межцевтрового расстояния отварь. стий платы. Цель изобретения - упрощение конструкции и уменьшение габаритов схвата. Поставпенная цель достигается тем, что схват снабжф пинцетами с губками, каждая из которых снабжена двумя парами щ)отивоположно расположенных приемных соцел, струйным реле, усилителями и Ш1евмо1идравлическнми баллонами, установленными на приводах проаояь ного и поперечного перемещений, причем пара 1ФОТИВОПОЛОЖНО расположенных сопел соединена со входами струйного реле, выходы которого через усилитель соединены с пневмогидравлическими баллонами. При этом каждый .привод содержит два наполненных жидкостью сипьфона. распопожешшх по обе сугороны подвижны звеньев. Кроме того k с целью улучшения , динамических свойств, охват снабжен дросселями, а пневмогидравлические баллоны соединены с с;яльфрнами через эти дроссели. На фиг. 1 схематично изображен пред лагаемый охват, производящий сборку радиодеталей с печатной платой, вид све ху; на фиг. 2. сечение А-А на фиГ 1 на фиг. 3 - сечение Б-Б на фиг. 1, на фиг. 4 - вид В на фиг. 3, на фиг. 5 пневматическая схема управления перемещениями одного пиннета. Схват состоит из двух симметричных пальцев, укрепленных на основаниях 1 и 2, которые смонтированы на общей платформе 3 с возможностью поперечного перемещения. Платформа 3 являет ся продолжением руки манипулятора (не показан). Поскольку пальцы симметричны и имеют одинаковую конструкцию, рассматривается только нижний (фиг. 1) палец Ои состоит из основания 1, к которому жестко крепится плоская пружина 4, основания 5, к кторому при помощи накладки 6 крепится плоская пружина 7 и нормально сжатого пинцета 8, же;Стко укрепленного на утопщенном конде пру.«ины 7. Между ножками пинцета 8 установлен привод 9 разжима пинцета. Та ким образом, схват состоит из двух пальцев, каждый из Korqpbix имеет две степени свободы, причем роль подвижны звеньев иГрают Консольно защемленные пружины 7 и 4. Приводы продольного и поперечного перемещений пальцев имеют одинаковую конструкцию. Каждый такой привод сог ержит два сильфона 1О и 11 (фиг. 2 ка торцах которых герметично закреш1е ны крьшки 12 и, 13. Крьпики 12 упираются в подвижное звено (плоскую пружину 7,), а крышки 13 снабжены пкевмргидравлическими баллонами 14 и 15. Сильфоны заполнешл жидкостью, : например, минералькым маслом. Пинцет снабжены губками (фиг. 4), в которых смош ированы приемные сопла 16-19 (фиг. 3 и 4), которые расположены в овух взаимно перпендикулярных ншфавпениях. Каждая пара противополсжных сопел, т.е. сопла 18 и 19, 16 и 17 (фиг. 5), соединена со входами струйных репе 2О я 21. Выходы этих реле череа усюштели 22-25 соединены с пневмугидравлетескими баллонами. Так, выходы реле 21 через усилители 24 и 25 соединены гибкими трубопровода ми соответственно с баллоном 14 и баллоном 15. Схема управления вторым пальцем аналогична, Схват оперирует с деталью 26, устанавливаемой в печатную плату 27, расположенную на монтажной плите 28, снабженной подводящими сопдами 29.Сильфоны 1О в 11 снабжены дросселями ЗО. ХЗхват работает следующим образом. Радиодеталь 26 с предварительно отогнутыми и подрезанными в размер токоотводами находится на загрузочной позиции (не показана) в ориентированном положении. Перед началом сборки печатная плата 27 устанавливается на монтажной плите 28, снабженной подводящими соплами 29, расположеш1Ь МИ под.каждым отверстием плиты 27. Под монтажный стол подается сжатый воздух низкого давления (порядка 800 мм водяного столба), коггорый истекает через отверстия плиты 27, В исходном положении система управления подает давление в прнвоаы 9, вследствие чего пинцеты 8 находятся в раскрытом положении. Рука .манипулятора подводит схват к загрузочной позиции так, что токоотводы оказываются между губками шшцетов, после чего давление с приводов 9 снимается и пинцеты за счет собственной упругости захватывают токоотводы. После этого, согласно программе, рука подводит схват с радиодеталью к нужной паре отверстий (фиг. 1). Если cxBat подходит к отверстию с некоторой погрешностью (на фиг. 3 схват несколько смещен влево), сборка в этом положении невозможна. Несимметричное положение токоотводов относительно отверстий платы приводит к тому, что струя воздуха, истекающего из отверстия, попадает только к приемному соплу 17 (фиг, 3) . В результате, давление в этом сопле бол;ыше, чем в ссшле 16. Это Щ)ивод«г к тому, что струя, питающая репе 21 (фиг, 5), под действием давлегшя, йоступа1дщего от сопла 17, перебрасывается в канал, соединенный со входом усилителя 25. На выходе усилителя 25 высокого давления появляется мощный сигнал, который поступает в пневмснгидравлический баллон 15. В баллоне 14 давление равно атмосферному. Жидкость из баллона 15 начинает выдавливаться в сильфон 11 (фиг.-2), рас-; тягивая его и деформируя пружину 7. }При этом пинцет 8 сдвигается вправо. 5 Кроме того пружина 7 сжимает сильфон 1О, Жидкость, находящаяся в сипьфоне, через дроссель ЗО перетекает в баллон 14. Аналогично работает схема управления вторым пальцем, и его пинцет та же смещается вправо. Пальцы в данном случае работают синхронно. Движение пальцев вправо прод одолжается до тех пор, пока токоотводы не займут центральное положение относительно отверстий платы. При этом вытекающие иа них струи воздуха одинаково обтек ют токоотводов, давление в прием ных соплах 16 и 17 сравнивается, питающая струя реле 21 попадает в центральный канал, и в баллонах 14 и 15 давление становится равным атмосферном На тфактике, за счет инерции палЫ1Ы. могут пройти положение равновесия и войти в режим затухающих и незатухаюч автоколебаний. Частота и.амплитуда эти колебаний зависит от величины колеблю щихся масс и величины демпфировання. Предлагаемая конструкция позволяет по лучить весьма малую амплитуду автоксь лебаний, которая значительно меныие, чем зазор между токоотводом и краем отверстия платы. Это обусловлено малы перемещающимися массами (перемещае ся не вся рука, как в известном схвата а лшиь пинцеты), высокой чувствитеяыго стью датчиков к величине рассогласовакия осей собираемых деталей (чувствител ность 1фиемных сопел - несколько ; . десятков миллиметров водяного стопба н кахздый микрон смещения токоотвода) и высокими демпфирующими свойствами сильфонов. В данной схеме, если один сильфон работает в режиме двигателя, то другой - в режиме демпфера, постоянная демпфирования которого огфеделяется гидравлическим сопротивлением дросселя 30. Если смещение происходит в другой плоскости, то вступают в работу сопла 18 и 19 и сильфоны продолыюго перемещения пальцев, демпфирующие пружину 4. Поскольку пальцы работают независимо друг от друга, то возможна даже в том случае, если межцентровые расстояния токоотводов значительно (1-2 мм) превосходят межцентровое расстояние отверстий платы или меньше его на ту же величину. В этом случае пальцы начинают двигаться в противоположные стороны, производя отгибку токоотводов. После паузы в 0,2-0,5 с, необходи-ч мой для того, чтобы процесс центриро68вания закончился, рука мшшпулятсра с малой скоростью начинает опускать охват производя сборку рэднодетали. Свстема упраалешш оря этом не шшшючается, так как при пр11бпнж на токоотводов точность цен1:рирования увеличивается. Предлагаемая конструкция схвата позволяет существенш) повысить авдех- ность сборку радиодетали с печатной платой, поскольку она обеспечивает достоянное устранение смещений осей , собираемых деталей, обеспечивая : возможность . сборки с одновременЕЮй деформацией токоотводов. Так, даже 1ФИ ynqpe токоотвода в край отверстия, на сильфоны поступает максимальное давление н они щюизводят отгибку токоп отвода в нужном направлении н сборку его с отверстием. Формула изобрет.ення Схват для сборки радиодеталей, соде{вкащий недвижные звенья, приводы продольного и ооавречного п емещвЕшя и пневматические элементы адаптации, о т л и ча ю ш в и с я ем, что, с целью у1фощения конструкции и уменьшения габецзитов, он снабжен ... пинцетами с губками, каждая из котфых снабженгэ двумя парами прогивоположво распопоженгных приемных сопел, струЙ1шм репе, уся- лителями а гт могвдравпическимн баллонами,; уотанонпеншдми на 1фивоаах продольного и --поперечного перемещеанй, гфичдм каждая пара щ отивопопожно расположенных сопел coe iHeHia со входами струйного реле, выходы которого через усшштель соединены с пневмогидравличво кими баллонами. 2,Схват по и. 1, о т л н ч а ю щ н и с я тем, что каждый 1фивод соде|пкит два ;напЬлнеш{ых. жидкостью сильфоаа, расположвЕШых по обе стороШ ПОДВЕЕЖНЫХ ЗВвНЬвВ. 3.Схват по п. 1, о т л и ч а ющ и и с я тем, что, с целью улучщения динамических свойств, он снабжен дроселями, а пневмогддравлическяе баллоны соединены с сипьфсшами через эти россели. Источники информации, принятые во внимание при экспертизе 1. Катыс Г. П. Оптические информациошхые сястемй роботов-машшулятороа ., Машиностроение, 1977, с. 36, ис. 5.
Т
Т
л
б-б увеличено 26
Фиг.З
ви90
tS
//
fuz.
18
Фиг. 5
