Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов.
Уровень техники
Известны технические решения релейно-компьютерной централизации (РКЦ) [Патент 2173278 (РФ). Релейно-компьютерная централизация [Полевой Ю.И. и др. - Опубл. Бюл. 2001, №25, МПК В61L 23/04; Патент 2265541 (РФ). Релейно-компьютерная централизация / Полевой Ю.И., Полевая Л.В. и др. - Опубл. Бюл. 2005, №34, МПК В61L 23/04]. РКЦ позволяет управлять и контролировать напольные объекты с помощью ЭВМ с участием путевых, огневых, стрелочно-управляющих и стрелочно-контрольных реле.
Недостатком технического решения является то, что оно не предусматривает обмен информацией с локомотивами с помощью радиосвязи.
Известно технические решения контроля освобождения перегона с использованием контрольно-путевой точки, с помощью которой фиксируется момент прохода головой и хвостом поезда границы рельсовой цепи. При проходе головой поезда этой границе на локомотиве включается осевой счетчик, который отсчитывает число оборотов, соответствует длине поезда, если отсчитанная длина равна фактической длине поезда, то перегон фиксируется свободным [Патент 2270123 (РФ). Устройство контроля освобождения перегона [Полевой Ю.И., Полевая Л.В. и др. - Опубл. 20.02.206 Бюл. №5, МПК В61L 23/16].
Недостатком технического решения является то, что оно не позволяет контролировать освобождение горловины станции и приемоотправочных путей.
Данные технические решения выбраны в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является осуществление регулирования движения поездов без использования рельсовых цепей на перегонах и станциях. Наиболее предпочтительным применение технического решения является его применение на участках с небольшими размерами движения.
Способ регулирования движения поездов с использованием радиосвязи и контрольных точек, при занятии и освобождении которых дважды фиксируются координата головы поезда, разница между которыми равна длине поезда, отличающийся тем, что он позволяет осуществить контроль освобождения перегонов, горловин станций и приемоотправочных путей с участием приемника ГЛОНАСС, станционных и локомотивных радиостанций и микропроцессорной централизации с дополнительной функцией контроля проследования поезда в полном составе, при этом по радиосвязи осуществляется обмен информацией между локомотивами и постами электрической централизации, а также между станциями, что позволяет осуществить полноценный режим регулирования движения поездов.
Краткое описание чертежей
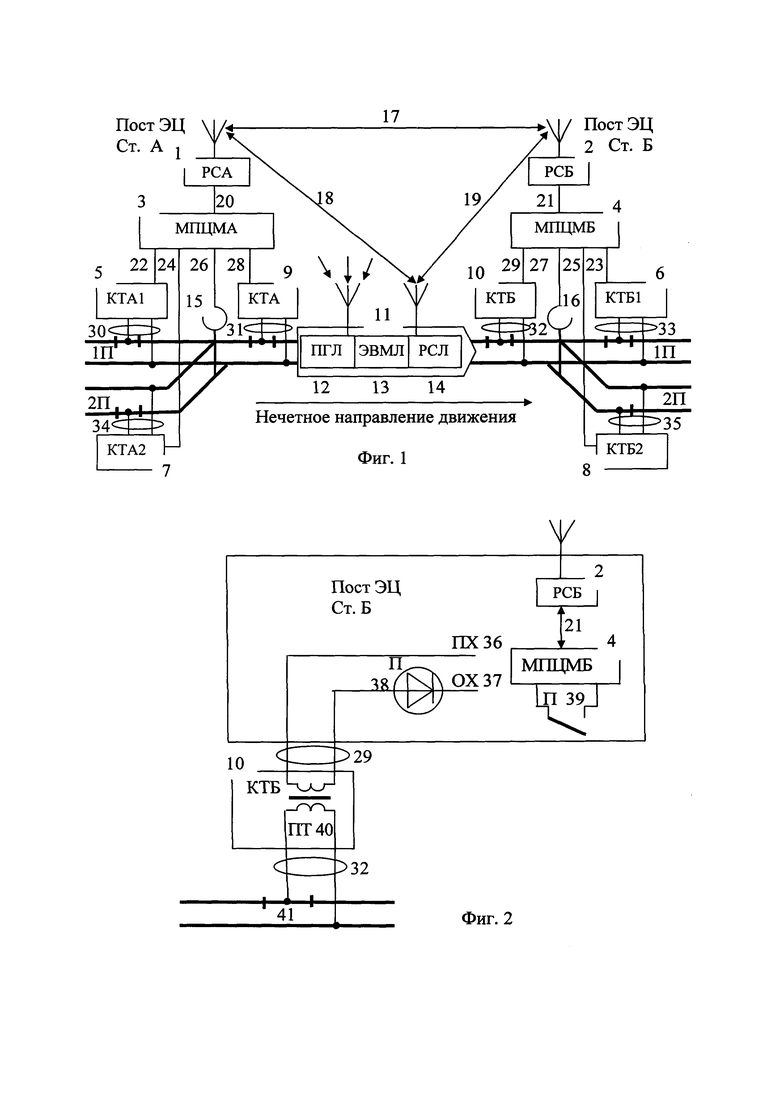
На фиг. 1 представлен схематический план с поездом и напольными объектами, на фиг. 2 - схема контрольной точки.
Описание изобретения
Ниже приведены следующие обозначения:
I и 2 - радиостанции станции (РСА) на станции А и радиостанция (РСБ) на станции Б;
3 и 4 - модернизированная микропроцессорная централизация на станции А (МПЦМА) и модернизированная микропроцессорная централизация на станции Б (МПЦМБ), микропроцессорные централизация разработаны на базе ЭВМ без опасных отказов;
5 и 6 - контрольные точки на первом пути (КТА1) и (КТБ1) станции А и Б;
7 и 8 - контрольные точки на втором пути (КТА2) и (КТБ2) станции А и Б;
9 и 10 - контрольные точки КТА и КТБ на границах перегонов и станций А и Б;
11 - локомотив;
12, 13 и 14 - приемник ГЛОНАС - (ПГЛ), локомотивная ЭВМ - (ЭВМЛ), локомотивная радиостанция (РСЛ) соответственно;
15 и 16 - стрелочные электроприводы;
17, 18 и 19 - радиоканалы между станционными радиостанциями, между локомотивной радиостанцией и радиостанцией ж д. станцией А, между локомотивной радиостанцией и радиостанцией ж д. станцией Б соответственно;
20-35 соединительные провода между радиостанциями и МПЦ, МПЦ и напольными объектами, напольными объектами и рельсами;
36 и 37 - прямой и обратный полюса источника переменного тока (ПХ) и (ОХ);
38 - путевое реле (П);
39 - контакт путевого реле (П);
40 - путевой трансформатор (ПТ);
41 - отрезок рельсовой линии ограниченный изолирующими стыками.
На фиг. 1 изображена радиостанция РСА 1 станции А и радиостанция РСБ 2 станции Б; микропроцессорная модифицированная централизации МПЦМА 3 станции А и микропроцессорная модифицированные централизации МПЦМБ 4 станции Б; контрольная точка на первом пути ст. А 5 и контрольная точка на первом пути ст. Б 6, контрольная точка на втором пути ст. А 7 и контрольная точка на втором пути ст. Б 8, контрольная точка КТА 9 на ст. А и контрольная точка КТБ 10 на границах станций А и Б; локомотив 11, приемник ГЛОНАСС ПГЛ 12, локомотивная ЭВМ - ЭВМЛ 13, локомотивная радиостанция 14, стрелочный привод 15 на ст. А и стрелочный привод 16 на станции Б, радиоканалы между станционными радиостанциями 17, между локомотивной радиостанцией и радиостанцией ж д. станцией А 18, между локомотивной радиостанцией и радиостанцией ж д. станцией Б 19 соответственно; связи между радиостанциями и МПЦ, МПЦ и напольными объектами, напольными объектами и рельсами 20-35.
На фиг. 2 представлена схема контрольной точки КТБ 10 и связанные с ней узлы поста ЭЦ. На посту ЭЦ изображена радиостанция РСБ 2, централизация МПЦМБ 4, полюса ПХ 36 и ОХ 37, обмотка путевого реле П 38 и его контакт П 39. На точке КТБ изображен трансформатор ПТ 40, а также соединительные провода 29 и 32, и участок пути 41.
Способ регулирования движения поездов с использованием радиостанций предназначен для регулирования движения поездов на станциях и перегонах. Для контроля освобождения перегона на границах перегонов и станций предусмотрены контрольные точки КТА 9 и КТБ 10, для контроля освобождения приемоотправочных путей - контрольные точки КТА1 5, КТА2 7, КТБ1 6, КТБ2 8. Контроль освобождения горловин станций осуществляется совместными действиям точек КТА 9 и КТБ 10 и точек КТА1 5, КТА2 7, КТБ1 6, КТБ2 8.
Контроль освобождения каждого из участков осуществляется сравнением длины поезда вошедшего на участок и вышедшего с него. Так, например, для контроля освобождения перегона при следовании поезда в нечетном направлении с участием контрольной точки КТА 9 и связи 31 определяется длина поезда проследовавшего мимо этой точки, т.е. вошедшего на перегон. Длина поезда определяется следующим образом. С локомотива на ближайшие станции А и Б через непродолжительный интервал времени (1 с) периодически передается информация о местонахождения локомотива 11. Координата локомотива определяется с участием приемника ПГЛ 12, и с помощью радиостанции PCЛ 14 по радиоканалу 18 передается на радиостанцию РСА 1, которая по связи 20 транслирует ее на централизацию МПЦМА 3. На МПЦМА 3 за счет точки КТА 9 по связи 28 контролируется занятие и освобождение этой точки. С занятием точки КТА 9 фиксируется выход поезда на перегон. В момент освобождения точки КТА 9 фиксируется местонахождение локомотива 11. Расстояние между точкой КТА 9 и местонахождением локомотива 11 и есть искомая длина поезда. Аналогичным образом фиксируется длина поезда и на контрольной точке КТБ 10, которая соединена с централизацией МПЦМБ 4 связью 29, а с рельсами - связью 32. При вступлении головы поезда на контрольную точку КТБ 10 централизация МПЦМБ 4 фиксирует координату локомотива, и повторно фиксирует координату локомотива при освобождении этой контрольной точки. Информация о координатах локомотива определяется централизацией МПЦБ 4 с участием приемника ПГЛ 12, радиостанции PCЛ 14, радиоканала 19, радиостанции РСБ 2 и связи 21. Разность координат соответствует длине поезда.
Информация о длине поезда, прошедшего контрольную точку КТА 9, с помощью централизации МПЦМА 3, связи 20, радиостанции РСА 1, радиоканала 17, радиостанции РСБ 2, связи 21 передается на централизацию МПЦМБ 4. В этой МПЦ длина поезда вошедшего на перегон сравнивается с длиной поезда вышедшего с перегона, в случае их равенства перегон фиксируется свободным. В централизации МПЦМБ (ЭВМ) 4 предусмотрен программный модуль, который позволяет учесть изменение длины поезда на ±4% из-за особенности работы автосцепки.
Контроль освобождения горловины станции Б при следовании поезда в нечетном направлении осуществляется с участием контрольных точек КТБ 10 и КТБ1 6 или КТБ2 8, и централизации МПЦМБ 4, которая соединена с ними по связям 29, 23 и 25, а также связям 32, 33 и 35.
Контроль освобождения первого и второго приемоотправочных путей осуществляется централизацией МПЦМБ 4, с участием контрольных точек нечетной горловины КТБ1 6, КТБ2 8, связям 23, 25, 33 и 35, а также контрольных точек четной горловины станции Б и их связям (на фиг. 1 не показаны).
На фиг. 2 представлена схема контрольной точки для фиксации проследования поезда. Отрезок рельса 41 отделен от других рельс с обеих сторон изолирующими стыками. К этому отрезку и второму рельсу подсоединены выводы вторичной обмотки путевого трансформатора ПТ 40, первичная обмотка которого через обмотку путевого реле П 38 соединена с полюсами источника переменного тока ПХ 36 и ОХ 37. Общий и фронтовой контакты путевого реле П 39 подсоединены к выводам централизации МПЦМ 39. Модернизированная МПЦ - МПЦМ в отличие от МПЦ имеет устройство, которое позволяет обмениваться информацией с поездами посредством радиостанции PC.
Действие контрольной точки осуществляется следующим образом. При вступлении локомотива на отрезок 41 посредством путевого трансформатора ПТ 40 возбуждается путевое реле П 38 и замыкает свой фронтовой контакт П 39 в цепи централизации МПЦМБ 4. В этом момент в память записывается информация о координате локомотива 11, т.е. координата отрезка 41. Повторно в память информация о координате локомотива записывается в момент размыкания контакта реле П 39. Разница между указанными координатами соответствует длине поезда. Таким образом, определяется освобождение контролируемых участков: перегона, горловины станции, приемоотправочного пути. Информация о состоянии упомянутых участках передается на локомотивы, находящиеся в зоне связи локомотивных радиостанций со станционными. Зоной связи является путевой участок от оси предыдущей станции до оси следующей. На локомотиве предусмотрены две радиостанции, которые поочередно связываются со станционной радиостанцией впереди лежащей ж. д. станций, когда локомотив пересекает ось предыдущей станции, при этом прекращается связь с радиостанцией, которая установлена на предыдущей станции. Наличие информации о состоянии путевых участков и положении маршрутных стрелок с двух радиостанций ближайших ж. д. станций, информации о координате местонахождения локомотива, полученная с помощью приемника ГЛОНАСС, информации в памяти ЭВМ - ЭВМЛ) о параметрах поезда, путевом развитии станций, плане и профиле пути позволяет определить, допустимую скорость движения поезда для каждой точке пути. Поэтому на экране локомотивного навигатора может быть представлена кривая допустимой скорости ведения поезда.
Изобретение относится к области железнодорожной автоматики, для регулирования движения поездов. В способе используют контрольные точки, при занятии и освобождении которых дважды фиксируются координата головы поезда, разница между которыми равна длине поезда, осуществляют контроль освобождения перегонов, горловин станций и приемоотправочных путей с участием приемника ГЛОНАСС, станционных и локомотивных радиостанций и микропроцессорной централизации, с контролем проследования поезда в полном составе, при этом по радиосвязи осуществляется обмен информацией между локомотивами и постами электрической централизации, а также между станциями. С локомотива на ближайшие станции А и Б периодически передается информация местонахождения локомотива 11, координата которого определяется с участием приемника ПГЛ 12, и радиостанции PCЛ 14 по радиоканалу 18 передается на радиостанцию РСА 1, которая по связи 20 транслирует ее на микропроцессорную централизацию станции А (МПЦМА), где за счет точки КТА 9 по связи 28 контролируется занятие и освобождение этой точки. С занятием точки КТА 9 фиксируется выход поезда на перегон. В момент освобождения точки КТА 9 фиксируется местонахождение локомотива 11. Расстояние между точкой КТА 9 и местонахождением локомотива 11 и есть искомая длина поезда. Аналогичным образом фиксируется длина поезда и на контрольной точке КТБ 10. При вступлении головы поезда на контрольную точку КТБ 10 МПЦМB фиксирует координату локомотива и повторно фиксирует координату локомотива при освобождении этой контрольной точки. Информация о координатах локомотива определяется МПЦБ с участием приемника ПГЛ 12, радиостанции PCЛ 14, радиоканала 19, радиостанции РСБ 2 и связи 21. Разность координат соответствует длине поезда. Информация о длине поезда, прошедшего контрольную точку КТА 9, с помощью централизации МПЦМА, связи 20, радиостанции РСА 1, радиоканала 17, радиостанции РСБ 2, связи 21 передается на централизацию МПЦМБ, где длина поезда вошедшего на перегон сравнивается с длиной поезда, вышедшего с перегона, в случае их равенства перегон фиксируется свободным. Достигается возможность регулирования движения поездов без использования рельсовых цепей. 2 ил.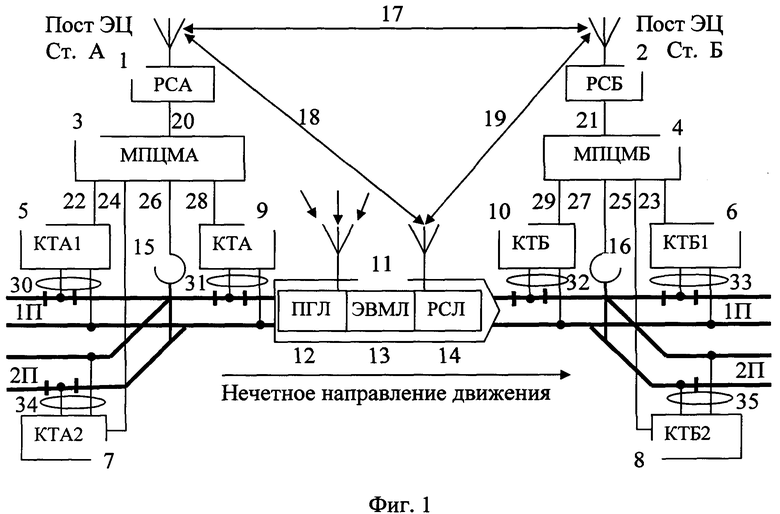
Способ регулирования движения поездов с использованием радиосвязи и контрольных точек, при занятии и освобождении которых дважды фиксируются координата головы поезда, разница между которыми равна длине поезда, отличающийся тем, что он позволяет осуществить контроль освобождения перегонов, горловин станций и приемоотправочных путей с участием приемника ГЛОНАСС, станционных и локомотивных радиостанций и микропроцессорной централизации с дополнительной функцией контроля проследования поезда в полном составе, при этом по радиосвязи осуществляется обмен информацией между локомотивами и постами электрической централизации, а также между станциями, что позволяет осуществить полноценный режим регулирования движения поездов.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2017 |
|
RU2652319C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |
| Система интервального регулирования движения поездов | 2017 |
|
RU2653672C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2010 |
|
RU2438905C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОСВОБОЖДЕНИЯ ПЕРЕГОНА | 2004 |
|
RU2270123C1 |

