Изобретение относится к медицинской технике, а именно к физиотерапии, и может быть использовано самостоятельно или в комплексном лечении и реабилитации пациентов с нарушением периферического кровотока для улучшения системной микроциркуляции, в том числе ускорения венозного и лимфатического оттока, профилактики образования тромбов.
Известно достаточно много физиотерапевтических методов улучшения кровообращения сердечно-сосудистой системы. Метод пневмокомпресии способствует повышению тонуса сосудов венозного и лимфатического русла, активации пассажа межклеточной жидкости, тем самым активизирует отток жидкости из конечностей и улучшает венозный отток. Ходьба, также как и имитация ходьбы с помощью тренажеров, способствует улучшению кровообращения сердечно-сосудистой системы за счет увеличения интенсивности работы сердечной мышцы.
Известно устройство для дозированной противофазной пневмокомпресии стоп ног и кистей рук человека (патент РФ №2700493, МПК А61Н 9/00, опубл. 17.09.2019), состоящее из пневмокомпрессора, трубок для подачи воздуха, пневматических манжет и блока управления, которое выполнено с возможностью воздействия на стопы ног и кисти рук человека давлением в диапазоне от 75 до 90 мм рт.ст. с частотой 0,1 Гц, при этом пневматические манжеты выполнены закрывающими пальцы рук с частично кистью и пальцы стоп с частично стопой, при этом устройство выполнено таким образом, что при подаче напряжения на пневмопереключатель пневмокомпрессор подает воздух в одну пару манжет и по истечении 5 секунд подает давление в другую пару манжет, образуя цикл продолжительностью 10 секунд, при этом когда воздух нагнетают в одну пару манжет, из второй воздух свободно выходит, так как пневмопереключатель открывает клапан спуска воздуха.
Недостатком данного устройства - тренажера является недостаточная эффективность стимулирования кровообращения сердечно-сосудистой системы, поскольку оно обеспечивает только поверхностный эффект и не задействует мышцы.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство для стимулирования кровообращения нижних конечностей (патент РФ №80748, МПК А61Н 7/00, опубл. 27.02.2009), содержащее раму-основание с ложем для размещения пациента и механизм для нагрузки конечностей, при этом ложе для размещения нижних конечностей выполнено в виде двух секций, шарнирно соединенных между собой и с ложем для пациента, причем механизм нагрузки выполнен в виде L-образного рычага, шарнирно соединенного средней своей частью с рамой-основанием и снабженным на одном из концов регулируемой по длине рукояткой и продольным пазом на другом конце, взаимодействующим с осевым шарниром, расположенным на боковом торце секции для размещения нижних конечностей.
Недостатками прототипа являются неудобство в эксплуатации и ограниченные функциональные возможности в связи с использованием собственной мышечной силы пациента для создания движения, что делает невозможным использование данного устройства для пациентов, которым противопоказана физическая нагрузка, а также для пациентов, находящихся без сознания. А также затрудняет его использование для пациентов, находящихся в слабой физической форме, так как для эффективной проработки требуется долговременная нагрузка.
Задачей заявленного изобретения является создание физиотерапевтического комплекса для стимулирования кровообращения сердечно-сосудистой системы.
Техническим результатом изобретения является повышение эффективности стимулирования кровообращения благодаря обеспечению комплексом максимального приближения к физиологическим движениям, имитирующим работу мышечно-венозной помпы для лежачих пациентов без возможности естественной работы этой помпы (ходьба).
Поставленная задача решается и технический результат достигается физиотерапевтическим комплексом для стимулирования кровообращения сердечно-сосудистой системы, содержащим основание, на котором размещен механизм сгибания-разгибания конечностей, состоящий из двух каркасов, каждый из которых выполнен из двух секций, шарнирно соединенных между собой, образующих ложемент бедра и ложемент голени, в котором, в отличие от прототипа, на основании установлена панель управления, связанная с блоком запуска и контроля режимов работы комплекса, блок питания, привод поступательного перемещения механизма сгибания-разгибания конечностей, а на механизм сгибания-разгибания конечностей установлен механизм дозированной пневмокомпресии, состоящий из турбокомпрессора, соединенного посредством гибких трубок с пневматическими манжетами, причем манжеты размещены на механизме сгибания-разгибания конечностей таким образом, что часть их закреплена на ложементе бедра, а часть - на ложементе голени, образуя таким образом каркасы ложа для нижних конечностей, которые интегрированы в шарнирно-рычажные механизмы трансмиссии, расположенные с двух сторон от привода поступательного перемещения, двигатель которого связан с кареткой, шарнирно соединенной с ведущим звеном, сопряженным с обоими шарнирно-рычажными механизмами трансмиссии, которые снабжены каждый первым и вторым замыкающими звеньями, установленными с обеих наружных сторон трансмиссии, и соединены между собой с помощью промежуточного шарнира первого замыкающего звена, сопряженного с одним из шарниров второго замыкающего звена, другой шарнир которого соединен с ложементом бедра, причем первое замыкающее звено соединено шарнирами на своих концах с ложементом голени и с основанием, обеспечивая возможность циклических сгибаний и разгибаний ложементов посредством поступательного движения каретки, передающегося на трансмиссию, при этом привод поступательного перемещения механизма сгибания-разгибания конечностей выполнен с кривошипом, а блок запуска и контроля режимов работы комплекса выполнен с возможностью привязки режима накачки/откачки манжет к фазе сгибания/разгибания конечности посредством датчика положения кривошипа.
Согласно изобретению, кривошип привода поступательного перемещения механизма сгибания-разгибания конечностей установлен па основании и одним концом жестко соединен с валом двигателя, а вторым концом шарнирно соединен с шатуном, шарнирно соединенным с кареткой, перемещающейся продольно по направляющей и преобразующим вращательное движение вала двигателя в возвратно-поступательное движение каретки.
Согласно изобретению, двигатель может быть соединен с кривошипом через редуктор.
Согласно изобретению, двигатель может быть соединен с кривошипом посредством ременной передачи.
Согласно изобретению, на ложементах бедра и голени может быть размещено по три манжеты.
Согласно изобретению, на ложементе голени может быть установлен ложемент стопы с дополнительной манжетой.
Согласно изобретению, панель управления может быть выполнена с сенсорным экраном.
Согласно изобретению, блок запуска и контроля режимов работы комплекса может быть выполнен с возможностью беспроводной связи.
Достижение технического результата предложенным изобретением обусловлено комплексным воздействием, обеспечивающим не простую сумму эффектов, а сверхсуммарный эффект благодаря следующему. Если использовать только пневмокомпрессию конечностей описанному выше аналогу, то помпа не работает, так как пневматические манжеты не могут сдавить конечность настолько сильно, чтобы сократить глубокие вены, эффект только поверхностный. При этом для лежачих пациентов такой стимуляции недостаточно. Мышцы при этом не задействованы. При использовании только механического привода сгибания-разгибания конечности в конечностях не возникает давления - кровь не поднимается по ногам обратно к сердцу (нет «волны»). По причине замедленного кровотока повышается вероятность образования тромбов. Имитация венозной помпы возможна только при комплексном воздействии механической и пневматической части, максимально имитирующих шаг человека. При этом сокращение манжет и движения механической части должны быть синхронизированы таким образом, чтобы повторять последовательность напряжения мышц человека при совершении шага. Предложенное изобретение обеспечивает такую имитацию ходьбы.
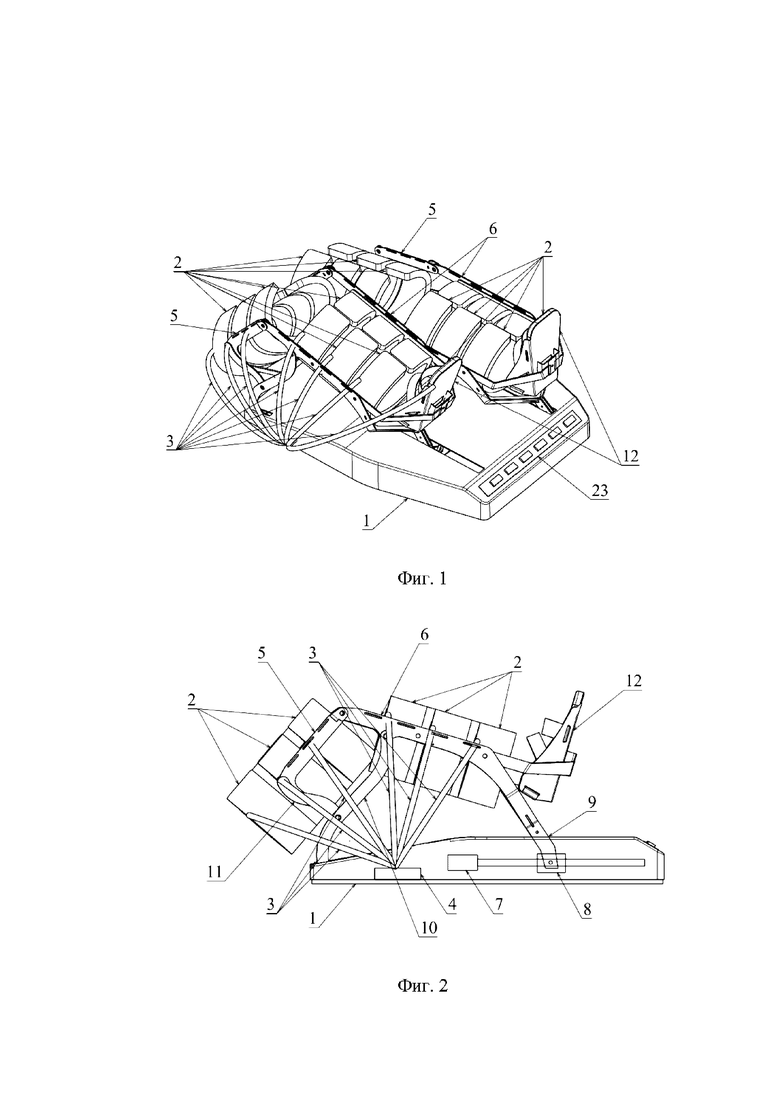
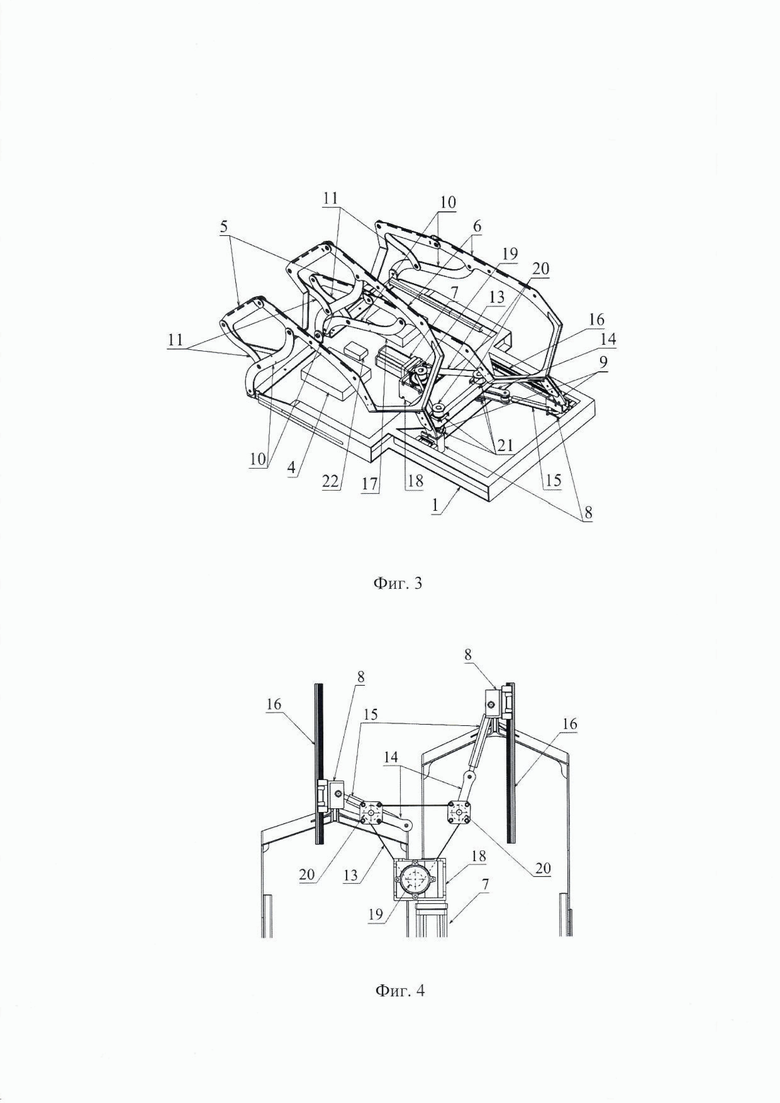
Изобретение поясняется чертежами, на которых на фиг. 1 показан общий вид физиотерапевтического комплекса, на фиг. 2 - вид физиотерапевтического комплекса сбоку, на фиг. 3 - шарнирно-рычажные механизмы трансмиссии, на фиг. 4 - привод поступательного перемещения в исполнении кривошино-шатунного механизма с редуктором и ременной передачей.
Физиотерапевтический комплекс для стимулирования кровообращения сердечно-сосудистой системы (фиг. 1, 2) содержит основание 1, на котором размещен механизм сгибания-разгибания конечностей, на котором установлен механизм дозированной пневмокомпресии. Механизм пневмокомпрессии содержит два кожуха для размещения нижних конечностей пациента, каждый из которых состоит из трех манжет 2, соединенных гибкими трубками 3 с турбокомпрессором 4 с возможностью создания давления в диапазоне 75-90 мм рт.ст. независимо в каждой из манжет, закрепленных ремнями на ложементах бедра 5 и ложементах голени 6 механизма сгибания-разгибания конечностей, образующих каркас ложа для размещения нижних конечностей пациента, и интегрированных в шарнирно-рычажные механизмы трансмиссии, расположенные с двух сторон от привода поступательного перемещения, двигатель 7 которого связан с кареткой 8, шарнирно соединенной с ведущим звеном 9, сопряженным с обоими шарнирно- рычажными механизмами трансмиссии, которые снабжены каждый первым 10 и вторым 11 замыкающими звеньями, установленными с обеих наружных сторон трансмиссии, и соединены между собой с помощью промежуточного шарнира первого замыкающего звена 10, сопряженного с одним из шарниров второго замыкающего звена 11, другой шарнир которого соединен с ложементом бедра 5, а первое замыкающее звено 10 соединено шарнирами на своих концах с ложементом голени бис основанием 1, с возможностью циклических сгибаний и разгибаний ложементов 5 и 6 посредством поступательного движения каретки 8, передающегося па трансмиссию. Па ложемент голени 6 установлен ложемент стопы 12 с дополнительной манжетой. Привод поступательного перемещения посредством ремня 13 соединен с кривошипами 14 и шатунами 15, связанными с каретками 8, перемещающимися по направляющим 16, установленным с двух боковых сторон основания 1 (фиг. 3).
Физиотерапевтический комплекс для стимулирования кровообращения сердечно-сосудистой системы работает следующим образом.
При подаче питания на блок питания 17 приводится во вращение электродвигатель 7, соединенный через редуктор 18 с ведущим шкивом 19, с которого ремнем 13 передается вращение на шкивы 20, жестко скрепленные с кривошипами 14, установленными через фланцевые опоры 21 на основании 1 с возможностью их вращения (фиг. 4). Вращаясь, кривошипы 14 через шатуны 15 приводят в возвратно-поступательное движение каретки 8, закрепленные на направляющих линейного перемещения 16, которые, в свою очередь, соединены через шарниры с ведущими звеньями 9 трансмиссии посредством звеньев 10 и 11, переводящих возвратно-поступательное движение в циклическое сгибание-разгибание ложементов 5 и 6 как относительно друг друга, так и основания 1.
В зависимости от выставленного начального положения кареток 8 на направляющих 16 сгибание ног может быть как синхронным, так и в противофазе или в промежуточных состояниях.
Скорость сгибания/разгибания задается скоростью вращения двигателя 7, регулируемого напряжением блока питания 17.
Диапазон сгибания и разгибания не регулируется и задается геометрией кривошипно-шатунного механизма.
Привязка режима накачки/откачки манжет к фазе сгибания/разгибания конечности происходит через блок запуска и контроля режимов работы комплекса 22 посредством датчика положения кривошипа (на схеме не показан).
Создание давления в манжетах может осуществляться последовательно со стороны голени, синхронизировано с циклами сгибания и разгибания, которые могут быть смещены на половину цикла (одна нога сгибается, другая - разгибается).
Реализуемое с помощью предложенного устройства комплексное воздействие создает имитацию ходьбы у лежачего пациента, что существенно повышает эффективность стимулирования сердечно-сосудистой системы и не позволяет крови застаиваться в нижних конечностях с образованием тромбов.
Управление процедурой происходит через панель управления комплексом 23. На панели задается скорость движения и время работы, включение и выключение питания, режимы накачки манжет. Сгибание синхронное/асинхронное при текущей кинематике производится выставлением в ручном режиме положения трансмиссии при отключенном питании.
Из обзора клинических примеров, приведенных в известных источниках информации, следует, что процесс нейрофизиологической стимуляции способствует нормализации давления в раннем периоде применения (А.Ш. Абуталимов, Ю.В. Корягина, С.М. Абуталимова, Г.Н. Тер-Акопов, С.В. Нопин «Роботизированная механотерапия в комплексе процедур для восстановления функционального состояния нервно-мышечного аппарата и периферической гемодинамики легкоатлетов», https://doi.org/10.17116/kurort202310003139). Гидро-, прессо- способствует нормализации кровотока, тогда как включение в программу механотерапии, помимо действия па периферическую гемодинамику, улучшает нервно-мышечную передачу. В статье «Центральная и церебральная гемодинамика при роботизированной реконструкции ходьбы у больных в остром периоде ишемического инсульта» коллектива авторов Рыбалко Н.В., Даминова В.Д., Гороховой И.Г., Кузнецова Л.Н. приведены результаты исследований в Национальном медико-хирургическом Центре им. Н.И. Пирогова с участием 48 человек. Установлено положительное влияние занятий на аппаратном комплексе механотерапии па системную гемодинамику в виде нормализации АД, улучшения показателей церебральной гемодинамики, зафиксировано повышение линейной скорости кровотока по СМА и снижение сосудистого сопротивления, что можно трактовать как позитивное влияние механотерапии на церебральный кровоток. Включение роботизированной механотерапии в комплексное восстановительное лечение пациентов позволяет повысить качество реабилитационных мероприятий.
Таким образом, предложенное изобретение позволяет повысить эффективность стимулирования кровообращения сердечно-сосудистой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО СУСТАВА | 2000 |
|
RU2195912C2 |
| Устройство для разработки подвижности суставов нижней конечности | 1989 |
|
SU1655497A1 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| Устройство для разработки движений в коленном суставе | 1989 |
|
SU1671290A1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ НИЖНИХ КОНЕЧНОСТЕЙ | 1994 |
|
RU2085173C1 |
Изобретение относится к медицинской технике. Физиотерапевтический комплекс для стимулирования кровообращения сердечно-сосудистой системы содержит основание (1), на котором размещен механизм сгибания-разгибания конечностей. Механизм состоит из двух каркасов, каждый из которых выполнен из двух секций. Секции каркаса шарнирно соединены между собой и образуют ложемент бедра (5) и ложемент голени (6). На основании установлена панель управления (23), блок питания и привод поступательного перемещения механизма сгибания-разгибания конечностей. Механизм дозированной пневмокомпресии установлен на механизм сгибания-разгибания конечностей и состоит из турбокомпрессора, соединенного гибкими трубками (3) с пневматическими манжетами (2). Часть манжет закреплена на ложементе бедра, а часть - на ложементе голени. Двигатель привода поступательного перемещения связан с кареткой. Шарнирно-рычажные механизмы трансмиссии снабжены первым и вторым замыкающими звеньями и соединены промежуточным шарниром первого замыкающего звена, сопряженным с одним из шарниров второго замыкающего звена. Другой шарнир второго замыкающего звена соединен с ложементом бедра. Первое замыкающее звено соединено шарнирами на своих концах с ложементом голени и с основанием с возможностью циклических сгибаний и разгибаний ложементов посредством поступательного движения каретки, передающегося на трансмиссию. Достигается повышение эффективности стимулирования кровообращения за счет максимального приближения к физиологическим движениям, имитирующим работу мышечно-венозной помпы для лежачих пациентов без возможности естественной работы этой помпы в процессе ходьбы. 7 з.п. ф-лы, 4 ил.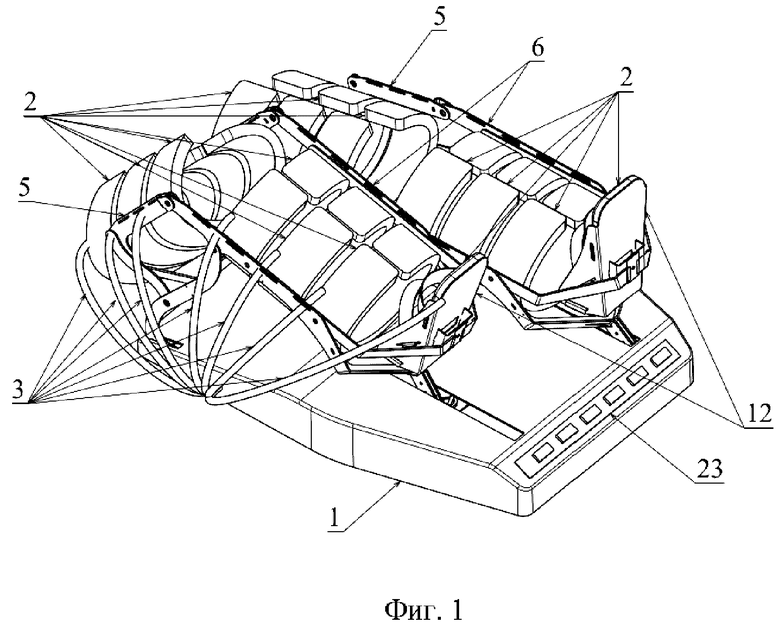
1. Физиотерапевтический комплекс для стимулирования кровообращения сердечно-сосудистой системы, содержащий основание, на котором размещен механизм сгибания-разгибания конечностей, состоящий из двух каркасов, каждый из которых выполнен из двух секций, шарнирно соединенных между собой, образующих ложемент бедра и ложемент голени, отличающийся тем, что на основании установлена панель управления, связанная с блоком запуска и контроля режимов работы комплекса, блок питания, привод поступательного перемещения механизма сгибания-разгибания конечностей, а на механизм сгибания-разгибания конечностей установлен механизм дозированной пневмокомпресии, состоящий из турбокомпрессора, соединенного посредством гибких трубок с пневматическими манжетами, причем манжеты размещены на механизме сгибания-разгибания конечностей таким образом, что часть их закреплена на ложементе бедра, а часть - на ложементе голени, образуя таким образом каркасы ложа для нижних конечностей, которые интегрированы в шарнирно-рычажные механизмы трансмиссии, расположенные с двух сторон от привода поступательного перемещения, двигатель которого связан с кареткой, шарнирно соединенной с ведущим звеном, сопряженным с обоими шарнирно-рычажными механизмами трансмиссии, которые снабжены каждый первым и вторым замыкающими звеньями, установленными с обеих наружных сторон трансмиссии, и соединены между собой с помощью промежуточного шарнира первого замыкающего звена, сопряженного с одним из шарниров второго замыкающего звена, другой шарнир которого соединен с ложементом бедра, причем первое замыкающее звено соединено шарнирами на своих концах с ложементом голени и с основанием, обеспечивая возможность циклических сгибаний и разгибаний ложементов посредством поступательного движения каретки, передающегося на трансмиссию, при этом привод поступательного перемещения механизма сгибания-разгибания конечностей выполнен с кривошипом, а блок запуска и контроля режимов работы комплекса выполнен с возможностью привязки режима накачки/откачки манжет к фазе сгибания/разгибания конечности посредством датчика положения кривошипа.
2. Физиотерапевтический комплекс по п. 1, отличающийся тем, что кривошип привода поступательного перемещения механизма сгибания-разгибания конечностей установлен на основании и одним концом жестко соединен с валом двигателя, а вторым концом шарнирно соединен с шатуном, шарнирно соединенным с кареткой, перемещающейся продольно по направляющей, и преобразующим вращательное движение вала двигателя в возвратно-поступательное движение каретки.
3. Физиотерапевтический комплекс по п. 2, отличающийся тем, что двигатель соединен с кривошипом через редуктор.
4. Физиотерапевтический комплекс по п. 2, отличающийся тем, что двигатель соединен с кривошипом посредством ременной передачи.
5. Физиотерапевтический комплекс по п. 1, отличающийся тем, что на ложементах бедра и голени размещены по три манжеты.
6. Физиотерапевтический комплекс по п. 1, отличающийся тем, что на ложементе голени установлен ложемент стопы с дополнительной манжетой.
7. Физиотерапевтический комплекс по п. 1, отличающийся тем, что панель управления выполнена с сенсорным экраном.
8. Физиотерапевтический комплекс по п. 1, отличающийся тем, что блок запуска и контроля режимов работы комплекса выполнен с возможностью беспроводной связи.
| СЛИВНОЕ УСТРОЙСТВО ДЛЯ ПОЛНОГО ОПОРОЖНЕНИЯ РЕЗЕРВУАРОВ ДЛЯ ОГНЕОПАСНЫХ ЖИДКОСТЕЙ | 1948 |
|
SU80748A1 |
| УНИВЕРСАЛЬНОЕ РЕАБИЛИТАЦИОННОЕ УСТРОЙСТВО ПРИНУДИТЕЛЬНОГО ПЕРЕДВИЖЕНИЯ НОГ | 2020 |
|
RU2729732C1 |
| CN 114831868 A, 02.08.2022 | |||
| CN 213490336 U, 22.06.2021 | |||
| KR 101700730 B1, 13.02.2017 | |||
| US 5303716 A, 19.04.1994. | |||

