Изобретение относится к безрельсовым транспортным средствам, а именно к способам поворота трактора со всеми ведущими и управляемыми колесами и может быть использовано в транспортных средствах при их управлении различными конструкциями систем рулевого управления и позволяет обеспечивать перемещение его в различном заданном направлении.
Известен аналог в Тракторы. Теория [Текст] //В. В. Гуськов [и др.]; под общ. ред. В. В. Гуськова. - М.: Машиностроение, 1988. - 376 с. - стр. 211. способы поворотов тракторов со всеми управляемыми колесами: «краб», при котором передние и задние колеса поворачиваются в одну сторону относительно остова трактора и когда поворот передних и задних колес происходит в разные стороны относительно остова.
Недостатки: при первом способе невозможность осуществления поворота на 180°, что необходимо в междурядьях пропашных культур при работе трактора на поворотной полосе при круговом повороте, а при втором - устойчивого движения трактора, особенно при входе в поворот, где особенно проявляются динамические нагрузки, действующие на него.
Известен аналог в Кутьков Г.М. Тракторы и автомобили. Теория и технологические свойства [Текст] // Г.М. Кутьков - М.: КолосС, 2004. - 504 с. - стр. 327. способы поворотов тракторов со всеми управляемыми колесами: комбинацией способа поворота передними и задними колес в разные стороны относительно остова и способа бортом за счет создания разности крутящих моментов на ведущих колесах кинематически или торможением и комбинацией способа движения «крабом», при котором передние и задние колеса поворачиваются в одну сторону относительно остова трактора и способа бортом за счет создания разности крутящих моментов на ведущих колесах кинематически или торможением.
Недостатки: повороты сопровождаются сильной деформацией шин, их износом, большими потерями мощности, чрезмерным уплотнением и распылением почвы, а во втором случае невозможностью возврата к входу в междурядья.
Наиболее близким аналогом является способ поворота транспортного средства со всеми управляемыми колесами в описании заявки на изобретение №2005105376, МПК B62D 7/14, от 24.02.2005, опубл. 10.08.2006, заключающийся в том, что используют различные режимы поворота управляемых колес изменением их положения относительно остова, отличающийся тем, что вначале передние и задние управляемые колеса поворачивают синхронно в одну и ту же сторону относительно остова, а при достижении ими максимального значения угла поворота, определенного конструкцией трактора, задние колеса за счет сигнала от передних управляемых колес через гидравлические и механические связи автоматически возвращаются в нейтральное положение, и дальнейший поворот осуществляют передними управляемыми колесами.
Недостатки: во время движения на поворотной полосе, при переходе с прямолинейного участка «вход в поворот» на участок «установившийся поворот» и, в том числе, на самом участке установившегося движения, не удается осуществить достаточно устойчивое движение трактора, устранить динамические нагрузки, вызывающие боковое скольжение и занос, увеличение радиуса поворота и времени маневрирования, и вследствие чего невозможен возврат к входу в междурядья со смещением на величину ширины захвата технологического оборудования.
Технический результат: повышение устойчивости движения трактора при повороте во время движения на поворотной полосе, при переходе с прямолинейного участка «вход в поворот» на участок «установившийся поворот» с обеспечением возможности возврата к входу в междурядья со смещением на величину ширины захвата технологического оборудования.
Технический результат в заявляемый способ поворота транспортного средства со всеми управляемыми колесами достигается за счет того, что включает установку на переднем и заднем мосту транспортного средства силовых гидроцилиндров, которые подключают посредством системы трубопроводов высокого давления к гидрораспределителю, в котором размещают цилиндрический золотник, имеющий спиралевидные канавки для подачи масла от насоса гидросистемы в полости силовых гидроцилиндров, установленных на управляемых колесах, переключение с помощью рукоятки золотника в верхнее крайнее положение перед входом в поворот, обеспечивая поворот передних и задних колес в одну сторону, осуществление поворота рулевого колеса в необходимую сторону, подачу масла в гидроцилиндры передних управляемых колес и достижение определенного угла, при котором открывается полость в золотнике со спиральными каналами, обеспечивая поступление масла к гидроцилиндрам задних управляемых колес, которые поворачиваются в туже сторону, что и передние управляемые колеса, поворот рулевого колеса до максимального значения, при котором достигается максимальный угол передних управляемых колес, поворот рулевого колеса до максимального значения, при котором спиралевидные канавки в золотнике перекрываются, происходит сброс масла в гидробак, обеспечивая возврат задних управляемых колес в нейтральное положение, движение транспортного средства по установившейся траектории в поворот, достижение угла передних колес, осуществление дальнейшего поворота рулевого колеса до необходимого значения в соответствии с радиусом поворота, при котором осуществляется открывание полости в золотнике со спиральными каналами, обеспечивая поступление масла к гидроцилиндрам задних управляемых колес и возврат задних колес в прямолинейное положение, автоматическое возвращение задних колес в нейтральное положение и дальнейший поворот передними управляемыми колесами за счет сигнала от передних управляемых колес через гидравлические и механические связи, осуществление дальнейшего поворота передними управляемыми колесами.
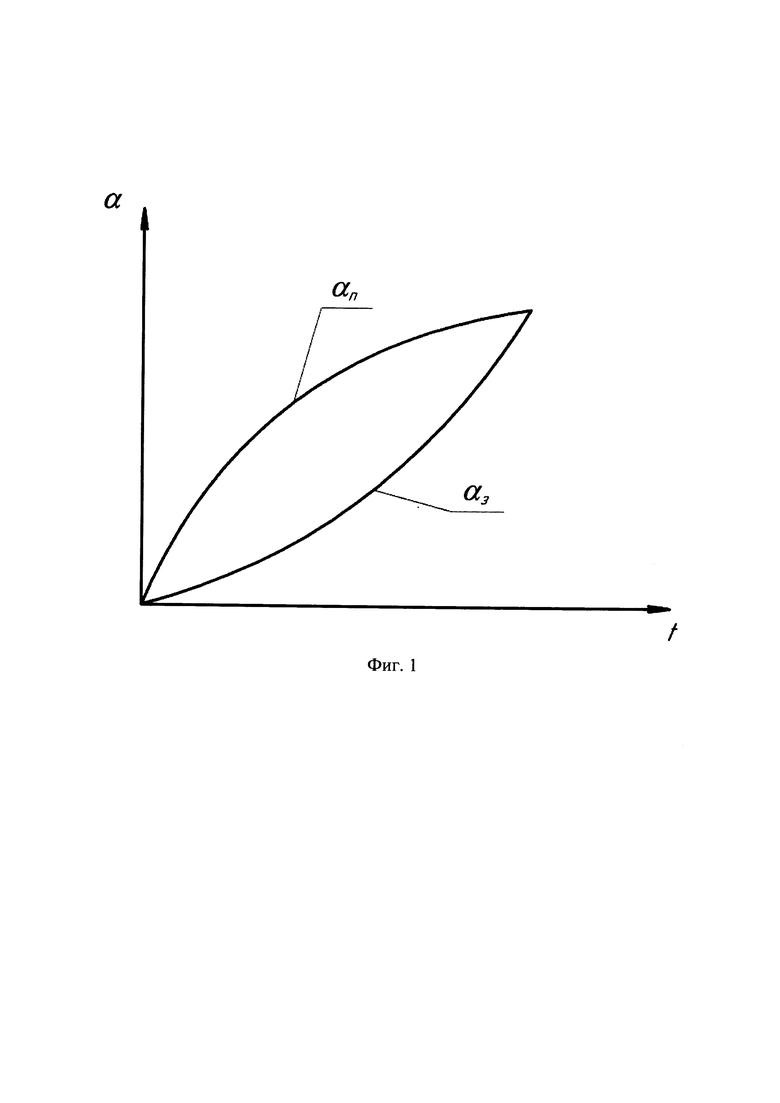
На участке «вход поворот» передние и задние управляемые колеса поворачивают в одну и ту же сторону относительно остова, но функции углов поворота по времени, соответственно передних и задних управляемых колес различны. Причем (фиг. 1) - функции таковы, что происходит некоторое запаздывание углов (угловой скорости) поворота задних управляемых колес относительно углов поворота (угловой скорости) передних управляемых колес.
В отличие от аналогов заявляемый способ позволяет плавно «перейти» на поворот передними управляемыми колесами, за счет чего повышается устойчивость движения: уменьшается боковое скольжение, нагребание грунта колесами - «бульдозерный» эффект, переход на новый режим поворота осуществляется более плавно без «рывка» вследствие уменьшения динамической нагруженное™ трактора и почвы, уменьшается радиус поворота, вследствие чего возможен возврат к входу в междурядья со смещением на величину ширины захвата технологического оборудования.
В конце участка «вход в поворот» продольная ось трактора будет находиться под углом к первоначальному положению, то есть трактор уже постепенно «вошел» в поворот, будет находиться на некоторой криволинейной траектории.
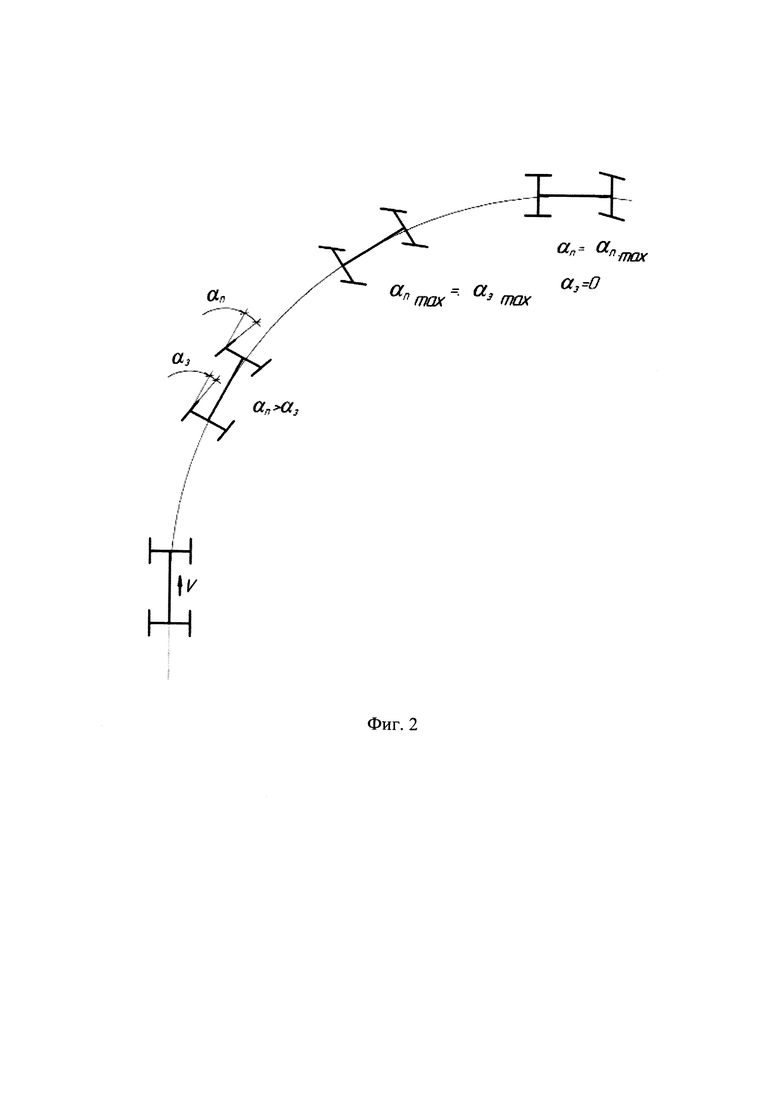
При достижении колесами максимального угла поворота, задние колеса автоматически возвращаются в нейтральное положение и дальнейший поворот осуществляется передними управляемыми колесами (фиг. 2).
При достижении передними и задними управляемыми колесами максимального угла поворота, определенного конструкцией трактора, задние колеса автоматически возвращаются в нейтральное положение, и в дальнейшем поворот осуществляется передними управляемыми колесами, но уже находясь на участке установившегося поворота. Это позволяет улучшить устойчивость движения трактора при его повороте.
Наличие отличительных от прототипа существенных признаков позволяет признать заявляемый способ новым.
Из уровня техники не выявлены технические решения, содержащие признаки, совпадающие с отличительными признаками заявляемого способа, поэтому заявляемый способ отвечают критерию изобретательского уровня.
Возможность осуществления заявляемого способа в промышленности позволяет признать способ соответствующими критерию промышленной применимости.
Заявляемый способ поясняется чертежами, где на фиг. 1 показано изменение углов поворота управляемых колес на участок входа в поворот; на фиг. 2 изображена схема движения трактора на повороте, где где αп - средний угол поворота передних управляемых колес; αз - средний угол поворота задних управляемых колес.
Заявляемый способ осуществляется следующим образом.
В гидрораспределитель устанавливают цилиндрический золотник, имеющий спиралевидные канавки для подачи масла от насоса гидросистемы в полости силовых гидроцилиндров, установленных на управляемых колесах. На переднем и заднем мосту трактора устанавливают силовые гидроцилиндры, которые подключают посредством системы трубопровод высокого давления к гидрораспределителю. При выборе траектории поворота - передние и задние колеса в одну сторону, передние и задние колеса в разные стороны переключают на гидрораспределителе рукоятку, которая воздействует на золотник. Масло по спиралевидным канавкам попадает из гидросистемы в полости силовых гидроцилиндров передних и задних колес в зависимости от выбора траектории поворота трактора.
Перед входом в поворот с помощью рукоятки переключения золотника переключают в верхнее крайнее положение, что обеспечивает поворот передних и задних колес в одну сторону, далее осуществляют поворот рулевого колеса в необходимую сторону. При этом происходит подача масла в гидроцилиндры передних управляемых колес и при достижении определенного угла поворота рулевого колеса открывается полость в золотнике со спиральными каналами и масло начинает поступать к гидроцилиндрам задних управляемых колес, которые в свою очередь будут поворачиваться в туже сторону, что и передние управляемые колеса. Значение угла поворота рулевого колеса может составлять 10-12° или 20-25°. Это определено конструкцией самого спиралевидного золотника. При достижении определенного угла поворота рулевого колеса открывается полость, при котором открывается полость в золотнике со спиральными каналами, поступление масла к гидроцилиндрам задних управляемых колес, которые поворачиваться в туже сторону, что и передние управляемые колеса, поворот рулевое колесо до максимального значения, при котором достигается максимальный угол передних управляемых колес, поворот рулевого колеса до максимального значения.
При достижении максимального угла передних управляемых колес, поворачивая рулевое колесо до максимального значения, спиралевидные канавки в золотнике перекрываются и происходит сброс масла в гидробак. В результате этого обеспечивается возврат задних управляемых колес в нейтральное положение и трактор движется по установившейся траектории в поворот, передние колеса достигают угла, при котором золотник гидроцилиндра откроется для приведения в движение устройство поворота задних колес. При этом оператор осуществляет дальнейший поворот рулевого колеса до необходимого значения в соответствии с радиусом поворота, после входа в установившийся поворот задние колеса с помощью золотниковой системы возвращают задние колеса в прямолинейное положение.
Задние колеса автоматически возвращаются в нейтральное положение за счет сигнала от передних управляемых колес через гидравлические и механические связи, и дальнейший поворот осуществляют передними управляемыми колесами.
Пример осуществления заявляемого способа.
При работе трактора в междурядьях пропашных культур при работе на поворотной полосе, где необходим круговой беспетлевой поворот, на участке «вход в поворот» колеса поворачивают в одну и ту же сторону относительно остова, но функции углов поворота по времени, соответственно передних и задних управляемых колес различны. Причем (фиг. 1) - функции таковы, что происходит некоторое запаздывание углов (угловой скорости) поворота задних управляемых колес относительно углов поворота (угловой скорости) передних управляемых колес, где αп - средний угол поворота передних управляемых колес; αз - средний угол поворота задних управляемых колес.
Виды функций и определяются конкретными эксплуатационными режимами и условиями работы (скорость, почвенный фон, вид агрегатирования (задняя, передняя и передняя и задняя навеска орудий), агротехнологические требования и др.).
В конце участка «вход в поворот» продольная ось трактора будет находиться под углом к первоначальному положению, то есть трактор уже постепенно «вошел» в поворот (будет находиться на некоторой криволинейной траектории).
При достижении колесами максимального угла поворота, задние колеса автоматически возвращаются в нейтральное положение и дальнейший поворот осуществляется передними управляемыми колесами (фиг. 2).
Это позволит плавно «перейти» на поворот передними управляемыми колесами, что повышает устойчивость движения, уменьшается боковое скольжение, нагребание грунта колесами - «бульдозерный» эффект, переход на новый режим поворота осуществляется более плавно без «рывка» за счет уменьшения динамической нагруженное™ трактора и почвы.
При достижении передними и задними управляемыми колесами максимального угла поворота, определенного конструкцией трактора, задние колеса автоматически возвращаются в нейтральное положение, и в дальнейшем поворот осуществляется передними управляемыми колесами, но уже находясь на участке установившегося поворота. Это позволяет улучшить устойчивость движения трактора при его повороте во время движения на поворотной полосе, при переходе с прямолинейного участка «вход в поворот» на участок «установившийся поворот» с обеспечением возможности возврата к входу в междурядья со смещением на величину ширины захвата технологического оборудования.
Технико-экономический эффект для заявляемого способа.
Использование заявляемого способа обеспечит повышение устойчивости движения трактора при повороте во время движения на поворотной полосе, при переходе с прямолинейного участка «вход в поворот» на участок «установившийся поворот» с обеспечением возможности возврата к входу в междурядья со смещением на величину ширины захвата технологического оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2004 |
|
RU2277488C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2003 |
|
RU2240943C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1999 |
|
RU2164211C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ ТРАКТОРА | 2015 |
|
RU2600002C1 |
| Колесное транспортное средство для работы на склонах | 1987 |
|
SU1463523A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО СНИЖЕНИЯ КУРСОВОГО УВОДА ПРИЦЕПА ТРАКТОРНОГО ПОЕЗДА | 2004 |
|
RU2270102C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1991 |
|
RU2013269C1 |
| Гидравлический рулевой привод шарнирно-сочлененного транспортного средства с передними управляемыми колесами | 1978 |
|
SU918157A1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАКТОРОМ ПОВОРОТОМ ПОЛУРАМ | 2014 |
|
RU2547966C1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1990 |
|
SU1729880A1 |
Изобретение относится к безрельсовым транспортным средствам, а именно к способам поворота трактора со всеми ведущими и управляемыми колесами. На переднем и заднем мостах транспортного средства устанавливаются силовые гидроцилиндры, которые подключают посредством системы трубопроводов высокого давления к гидрораспределителю, в котором размещают цилиндрический золотник, имеющий спиралевидные канавки для подачи масла от насоса гидросистемы в полости силовых гидроцилиндров, установленных на управляемых колесах. Переключение осуществляется с помощью рукоятки золотника перед входом в поворот, обеспечивая поворот передних и задних колес в одну сторону. Подача масла в гидроцилиндры передних управляемых колес происходит до достижения определенного угла, при котором открывается полость в золотнике со спиральными каналами, обеспечивая поступление масла к гидроцилиндрам задних управляемых колес. При максимальном угле поворота передних управляемых колес спиралевидные канавки в золотнике перекрываются, обеспечивая автоматический возврат задних управляемых колес в нейтральное положение и движение транспортного средства по установившейся траектории. Дальнейший поворот осуществляется передними управляемыми колесами за счет сигнала от передних управляемых колес через гидравлические и механические связи. Обеспечивается повышение устойчивости движения трактора при повороте во время движения на поворотной полосе, при переходе с прямолинейного участка «вход в поворот» на участок «установившийся поворот» с обеспечением возможности возврата к входу в междурядья со смещением на величину ширины захвата технологического оборудования. 2 ил.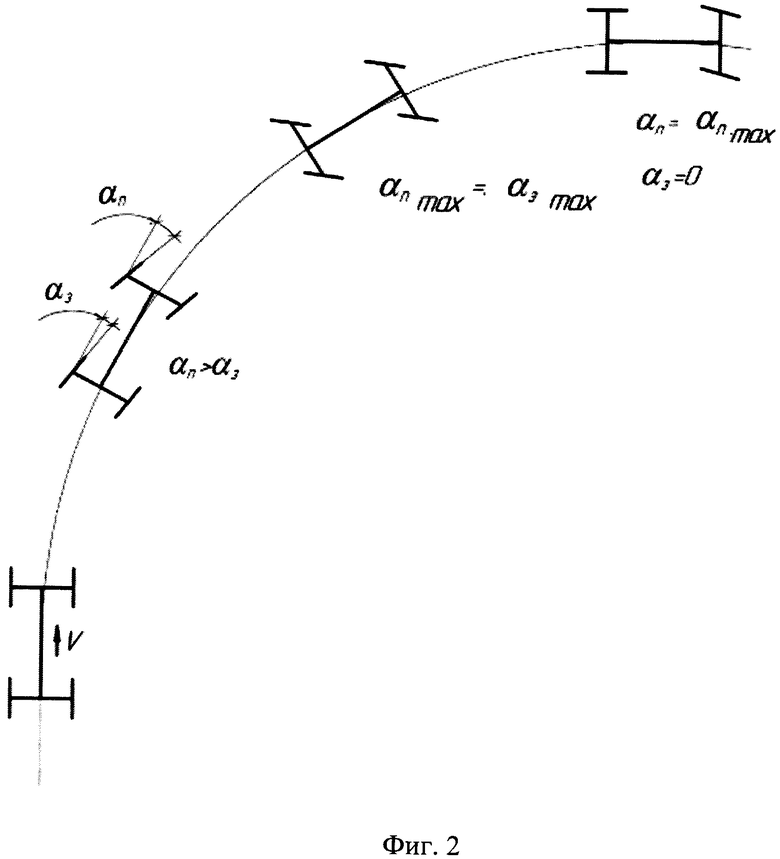
Способ поворота транспортного средства со всеми управляемыми колесами, отличающийся тем, что включает в себя установку на переднем и заднем мосту транспортного средства силовых гидроцилиндров, которые подключают посредством системы трубопроводов высокого давления к гидрораспределителю, в котором размещают цилиндрический золотник, имеющий спиралевидные канавки для подачи масла от насоса гидросистемы в полости силовых гидроцилиндров, установленных на управляемых колесах, переключение с помощью рукоятки золотника в верхнее крайнее положение перед входом в поворот, обеспечивая поворот передних и задних колес в одну сторону, осуществление поворота рулевого колеса в необходимую сторону, подачу масла в гидроцилиндры передних управляемых колес и достижение определенного угла, при котором открывается полость в золотнике со спиральными каналами, обеспечивая поступление масла к гидроцилиндрам задних управляемых колес, которые поворачиваются в ту же сторону, что и передние управляемые колеса, поворот рулевого колеса до максимального значения, при котором достигается максимальный угол передних управляемых колес, поворот рулевого колеса до максимального значения, при котором спиралевидные канавки в золотнике перекрываются, происходит сброс масла в гидробак, обеспечивая возврат задних управляемых колес в нейтральное положение, движение транспортного средства по установившейся траектории в поворот, достижение угла передних колес, осуществление дальнейшего поворота рулевого колеса до необходимого значения в соответствии с радиусом поворота, при котором осуществляется открывание полости в золотнике со спиральными каналами, обеспечивая поступление масла к гидроцилиндрам задних управляемых колес и возврат задних колес в прямолинейное положение, автоматическое возвращение задних колес в нейтральное положение и дальнейший поворот передними управляемыми колесами за счет сигнала от передних управляемых колес через гидравлические и механические связи, осуществление дальнейшего поворота передними управляемыми колесами.
| RU 2005105376 A, 10.08.2006 | |||
| CN 106741158 A, 31.05.2017 | |||
| СЕТЬ, ОБЪЕДИНЯЮЩАЯ УСИЛИТЕЛИ МОЩНОСТИ СИГНАЛОВ ВЫСОКОЙ ЧАСТОТЫ И ДВУХРЕЖИМНОЕ УСТРОЙСТВО СВЯЗИ | 1993 |
|
RU2144260C1 |
| JP S60179369 A, 13.09.1985. | |||

