Изобретение относится к способам определения траектории криволинейного движения транспортных средств, в частности тракторов, и может быть использовано при проведении экспериментальных исследований машинно-тракторных агрегатов (МТА) при выполнении полевых работ.
Наиболее часто используется непрямой способ определения траектории криволинейного движения МТА [Коденко М.Н., Рославцев А.В. Устройство для определения траектории движения гусеничных тракторов / М.Н. Коденко, А.В. Рославцев // Тракторы и сельхозмашины. - 1969, №10. - С. 13-15], когда в каждый момент времени регистрируются на ленте осциллографа угол поворота от начального положения (курсовой угол) φ при помощи гироскопического датчика курса и действительная скорость v движения агрегата посредством устройства, двойным шарниром соединенного с остовом трактора и состоящего из путевого колеса, редуктора и тахогенератора.
Для определения текущих значений φ и v необходимо участок осциллограммы с записью результатов их измерений разбить на n равных интервалов. Посредством значений φ и v рассчитывают текущие координаты X и Y линейных отклонений заданной точки МТА от начального положения.
На основании полученных функции X(t) и Y(t) строится траектория движения трактора, аппроксимацией полученных массивов методом наименьших квадратов.
Недостаток данного способа в том, что применяется сложное, громоздкое оборудование и недостаточно точные измерительные и регистрирующие приборы, а также в необходимости выставлять на ноль световой луч вибратора осциллографа при каждом новом положении трактора. При этом значительно снижается достоверность и точность экспериментальных исследований из-за ошибки измерений и ручной обработки результатов, записанных на ленту осциллографа.
Один из наиболее точных методов определения координат МТА на местности - фазовый метод радиопеленгации [Средства исследования движения МТА / А.В. Рославцев [и др.] // Тракторы и сельскохозяйственные машины. - 1999, №3. - С. 26-29] устройством, содержащим разностно-фазовый пеленгатор СВЧ-диапазона, соединенный через аналого-цифровой преобразователь с вычислителем; несколько генераторов СВЧ-диапазона с блоками питания, установленными на частях МТА; коммутатор, обеспечивающий последовательное включение генераторов, излучающих СВЧ-колебания через канал связи в направлении разностно-фазового пеленгатора. Выходное напряжение последнего через аналого-цифровой преобразователь подают на вычислитель, определяющий статистические характеристики и составляющий взаимокорреляционные связи угловых и линейных перемещений частей МТА.
Таким образом, этот метод позволяет непосредственно находить координаты характерных точек МТА, измеряя разности сигналов, генерируемых в разностно-фазовом пеленгаторе. Метод характеризуется недостаточно высокой точностью и достоверностью полученных результатов, возможностью исследования любых режимов движения МТА.
Недостаток такого способа - высокая стоимость оборудования, затраты на приобретение или изготовление которого явились бы не вполне оправданными для решения сравнительно узкой задачи, и снижение уверенного приема сигнала при увеличении расстояния от МТА до разностно-фазового пеленгатора.
Наиболее близким к заявленному способу определения траектории криволинейного движения трактора является способ определения траектории криволинейного движения трактора [заявка на изобретение №2005109594/28, 04.04.2005], предусматривающий получение фактической кривой копированием перемещения кинематического центра на поверхности почвы и построение ее графического изображения в полярной системе координат путем детальной разбивки фактической кривой и геодезическими измерениями.
Недостатком данного способа является низкая точность при построении кривой из-за произвольного выбора места установки теодолита, высокая трудоемкость и большие затраты времени на определение координат каждой ее точки.
Технический результат заключается в повышении точности определения траектории движения машинно-тракторного агрегата по полю, снижение трудоемкости, затрат времени на определение координат каждой точки кривой, снижение стоимости заявляемого способа.
Это достигается тем, что в качестве измерительного прибора для получения графического изображение кривой в полярной и прямоугольной системах координат путем детальной разбивки фактической кривой и геодезическими измерениями с выводом результатов измерения на дисплей используют автоматический тахеометр с выбором определенного места его установки.
При движении трактора по криволинейной траектории самоустанавливающийся диск очерчивает действительную траекторию его кинематического центра. На полученной траектории проводят детальную разбивку в зависимости от необходимой точности и помечают ее отвесно вехами. Электронным тахеометром определяют расстояние от места его установки до вехи, а также угол между соседними вехами, и результаты измерений выводятся на дисплей. Электронный тахеометр устанавливают с выбором определенного места его установки таким образом, чтобы расстояния от прибора до вех были минимальными, получают графическое изображение кривой в полярной и прямоугольной системах координат с выводом результатов измерения на дисплей.
В результате этих действий повышается точность полученной траектории движения машинно-тракторного агрегата по полю, снижение трудоемкости, затрат времени на определение координат каждой точки кривой, снижение стоимости заявляемого способа.
Наличие отличительных от прототипа существенных признаков позволяет признать заявляемое техническое решение новым.
Из уровня техники не выявлены технические решения, содержащие признаки, совпадающие с отличительными признаками заявляемого способа, поэтому заявляемый способ отвечает критерию изобретательского уровня.
Возможность осуществления заявляемого изобретения в промышленности позволяет признать его соответствующим критерию промышленной применимости.
Сущность заявляемого технического решения поясняется примером конкретного исполнения и чертежами, где показано:
на фигуре 1 изображен трактор с самоустанавливающимся диском по кинематическому центру (середина заднего колеса);
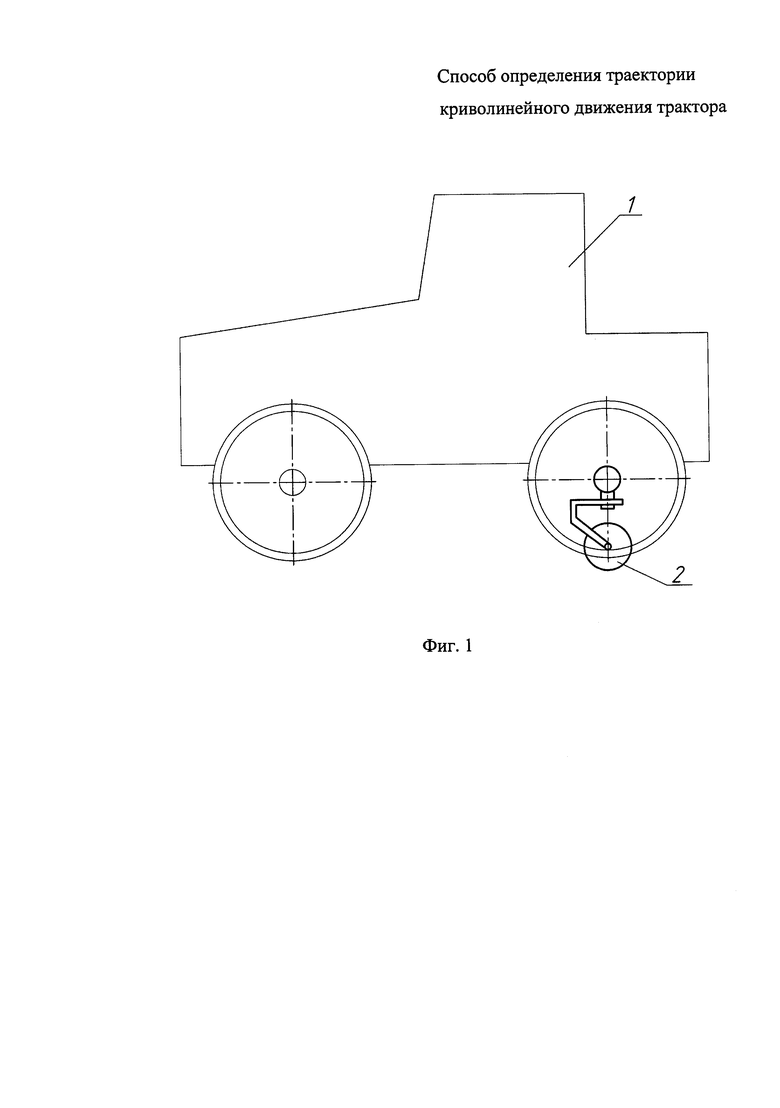
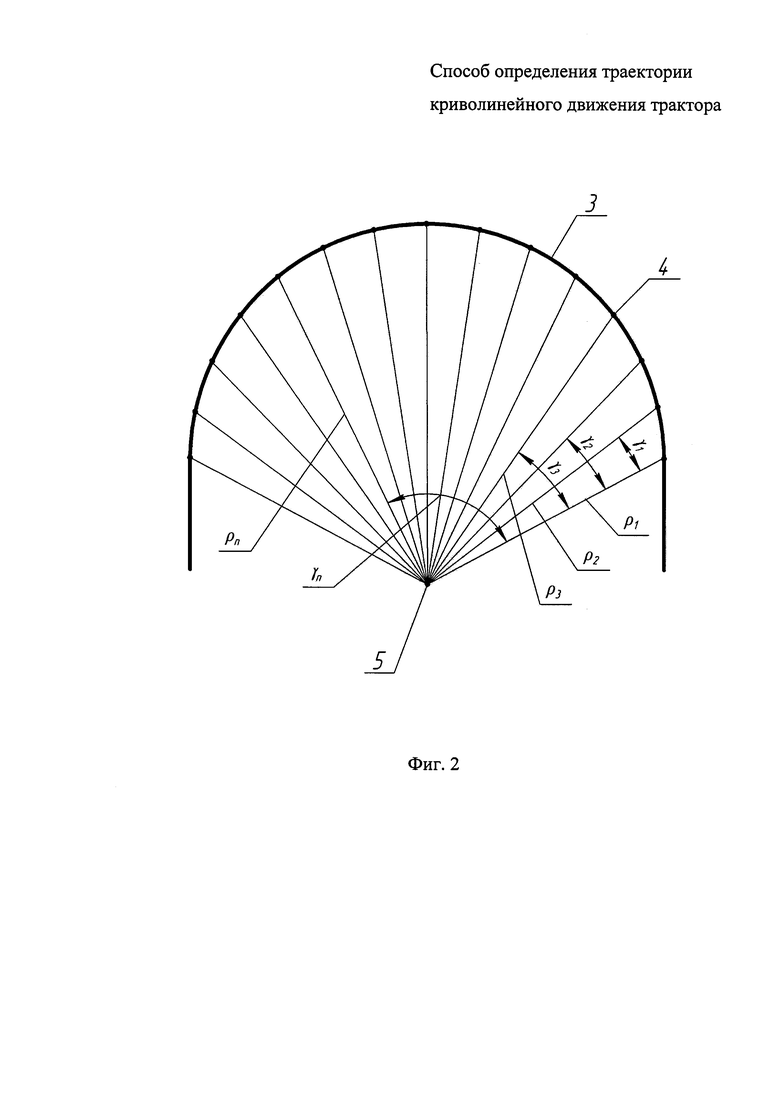
на фигуре 2 - схема получения траектории движения трактора и ее замера в полярных координатах;
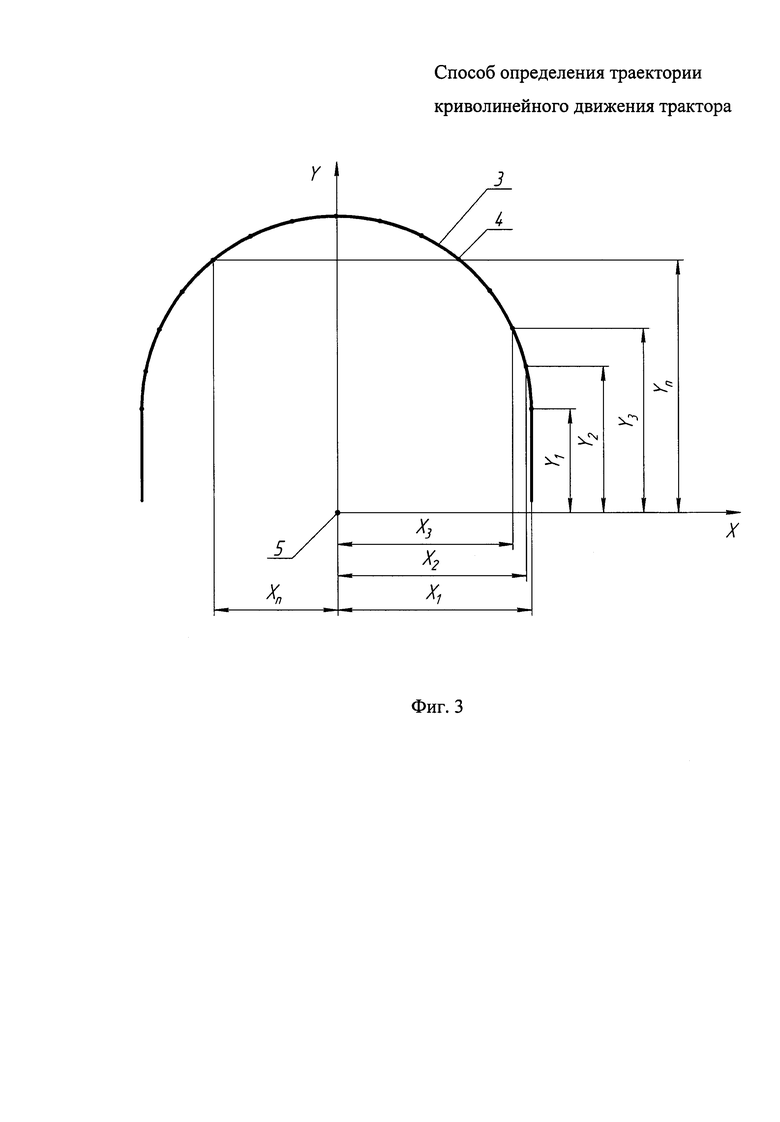
на фигуре 3 - схема получения траектории движения трактора и ее замера в прямоугольных координатах.
Способ определения траектории криволинейного движения трактора заключается в следующем.
При движении трактора 1 по криволинейной траектории самоустанавливающийся диск 2 очерчивает действительную траекторию 3, соответствующую траектории его кинематического центра. На полученной траектории проводят детальную разбивку через определенные интервалы (в зависимости от необходимой точности получаемого результата) и помечают ее отвесно вехами 4.
Электронным тахеометром 5 с автоматическим отсчетом углов и расстояний определяют с помощью лазерного луча полярные координаты траектории (расстояния от полюса (места установки тахеометра) до каждой из вех ρi и углы между линией, соединяющей первую из них с тахеометром и последующим γi) и прямоугольные координаты траектории (текущие значения координат X и Y каждой из вех относительно полюса), «проходя» по вехам отражающей пластиной. Результаты измерений выводятся на дисплей.
Электронный тахеометр 5 устанавливают с выбором определенного места. Для уменьшения погрешности измерений выбирается место таким образом, чтобы расстояния от прибора до вех были минимальными, что следует из данного условия
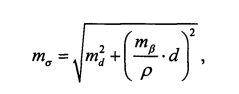
где md - погрешность измерения расстояния; mβ - погрешность измерения угла; ρ - угол между вехами; d - расстояние от прибора до вехи.
По имеющимся координатам получают действительную траекторию движения кинематического центра с очень высокой степенью точности, что особенно важно при экспериментальных исследованиях МТА, так как в реальных условиях они движутся на поворотной полосе с малыми радиусами траектории; при этом действительная траектория значительно отличается от номинальной и тем более от теоретической. Получение траектории двумя методами: в полярных и прямоугольных координатах, позволяет сравнить результаты и оценить точность экспериментальных исследований.
По полученной траектории, зная геометрические параметры МТА, можно определить траекторию движения любой его точки. А для подтверждения результатов можно получить описанным выше способом траекторию движения любой точки МТА экспериментально теми же способами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поворота транспортного средства со всеми управляемыми колесами | 2019 |
|
RU2705413C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАШИННО-ТРАКТОРНОГО АГРЕГАТА НА ПОЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2171461C1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Способ определения динамических характеристик движения машинно-тракторного агрегата и устройство для его осуществления | 1990 |
|
SU1723485A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЙ ОПОЛЗНЯ | 2024 |
|
RU2821434C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА | 2006 |
|
RU2323449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА ПРИ РАЗМЕЩЕНИИ АКУСТИЧЕСКОЙ АНТЕННЫ АКУСТИЧЕСКОГО ЛОКАТОРА НА НАКЛОННЫХ ПЛОЩАДКАХ ПОВЕРХНОСТИ ЗЕМЛИ | 2014 |
|
RU2549919C1 |
| Способ совместного определения координат, высот и дирекционных углов направлений | 2022 |
|
RU2798764C1 |
Изобретение относится к области сельскохозяйственного машиностроения, в частности к способам определения траектории криволинейного движения транспортных средств, в частности тракторов, и может быть использовано при проведении экспериментальных исследований машинно-тракторных агрегатов (МТА) при выполнении полевых работ. Способ предусматривает, что во время движения трактора (1) по криволинейной траектории самоустанавливающийся диск (2) очерчивает действительную траекторию, соответствующую траектории его кинематического центра. На полученной траектории проводят детальную разбивку через определенные интервалы (в зависимости от необходимой точности получаемого результата) и помечают ее отвесно вехами. Электронным тахеометром с автоматическим отсчетом углов и расстояний определяют с помощью лазерного луча полярные координаты траектории (расстояния от полюса (места установки тахеометра) до каждой из вех ρi и углы между линией, соединяющей первую из них с тахеометром и последующим γi) и прямоугольные координаты траектории (текущие значения координат X и Y каждой из вех относительно полюса), «проходя» по вехам отражающей пластиной. Результаты измерений выводятся на дисплей. Электронный тахеометр устанавливают с выбором места его установки с минимальным расстоянием до вех. По имеющимся координатам получают действительную траекторию движения кинематического центра с очень высокой степенью точности. Способ направлен на повышение точности определения траектории движения машинно-тракторного агрегата по полю, снижение трудоемкости, затрат времени на определение координат каждой точки кривой, снижение стоимости заявляемого способа. 3 ил.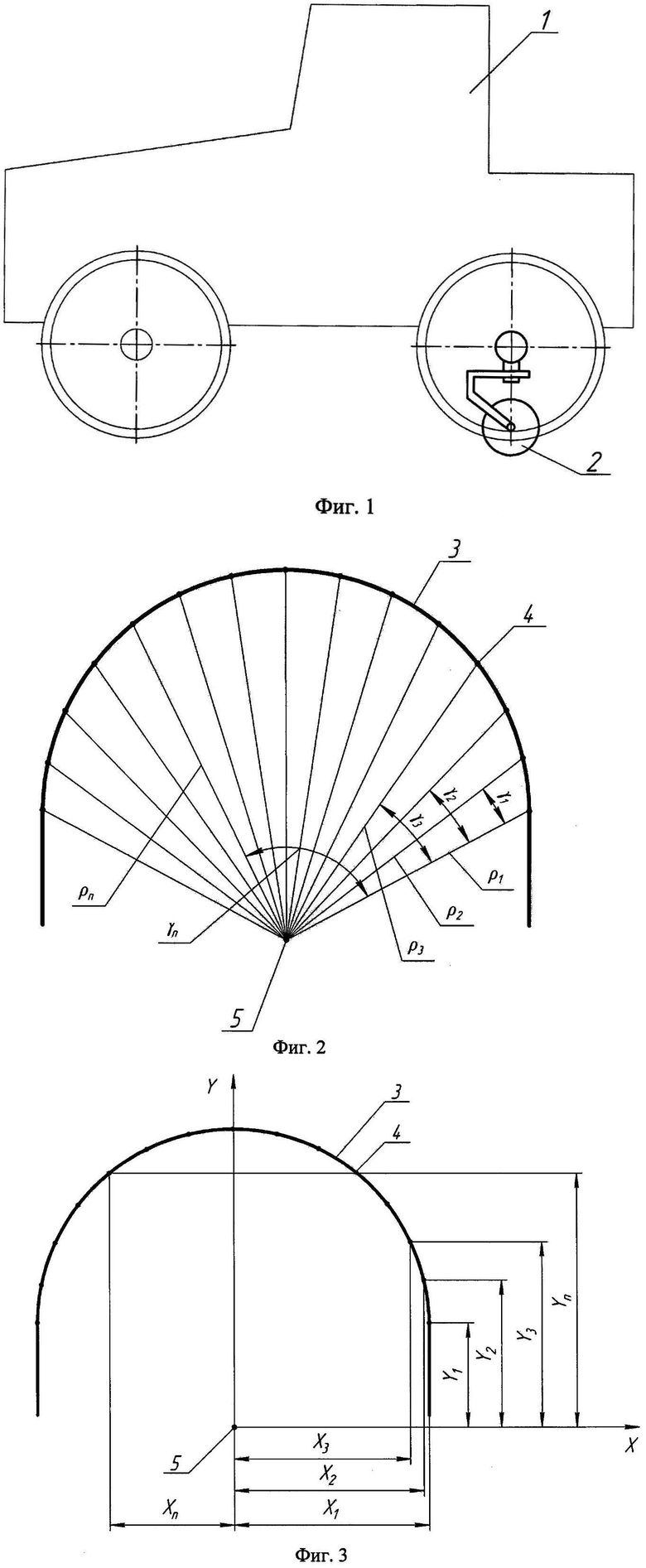
Способ определения траектории криволинейного движения трактора, предусматривающий получение действительной кривой копированием перемещения его кинематического центра на поверхности почвы посредствам самоустанавливающегося диска и построение ее графического изображения в полярной системе координат путем детальной разбивки фактической кривой и геодезическими измерениями, отличающийся тем, что графическое изображение кривой в полярной и прямоугольной системах координат получают путем детальной разбивки фактической кривой на вехи и геодезическими измерениями с выводом результатов измерения на дисплей, используя автоматический тахеометр с выбором места его установки с минимальным расстоянием до вех, проходя по ним отражающей пластиной.

