Изобретение относится к гидромолотам для погружения в грунт железобетонных и стальных свай, шпунта и других забивных элементов.
Известен способ управления гидромолотом по патенту ЕР 2325397, заключающийся в том, что подача рабочей жидкости в штоковую и поршневую полости гидроцилиндра молота осуществляется посредством распределительной системы, состоящей из одного либо двух электрогидравлических двухпозиционных клапанов, периодически сообщающих указанные полости с напорной и сливной магистралями.
Недостатком приведенного способа является то, что вытеснение рабочей жидкости из штоковой полости в сливную магистраль осуществляется при рабочем ходе молота, что обуславливает торможение ударной массы и, как следствие, значительные потери энергии цикла на гидравлическое трение.
Известен также способ управления гидромолотом по патенту RU 2109105, заключающийся в переключении двух двухпозиционных клапанов, один из которых периодически сообщает поршневую полость гидроцилиндра со сливной магистралью, другой периодически сообщает поршневую полость гидроцилиндра со штоковой полостью, причем оба клапана срабатывают практически одновременно при подаче гидравлического сигнала от электрогидравлического распределителя, который, в свою очередь, переключается за счет взаимодействия подвижного элемента молота с датчиком положения.
Недостатком данного способа управления является наличие «короткого замыкания», имеющего место при срабатывании клапанов: поскольку при переключении клапаны начинают движение одновременно, неизбежна ситуация, в течение которой (от нескольких миллисекунд до сотых долей секунды) напорная и сливная магистрали оказываются сообщенными, при этом возникающая утечка может привести к существенным потерям энергии цикла.
Наиболее близкой к заявляемому способу является система управления гидропневматическим молотом по авторскому свидетельству SU 1532174, содержащая гидравлический источник давления, соединенный через сливной и напорный клапаны со штоковой полостью силового цилиндра, электрогидравлические распределители, предназначенные для переключения указанных клапанов, а также систему автоматического управления, обеспечивающую последовательность переключений электрических гидрораспределителей и, соответственно, клапанов, причем система автоматического управления выполнена в виде датчиков давления и блоков вычисления давления, по сигналу которых и происходят переключения клапанов на рабочий и холостой ход.
Приведенная система управления обеспечивает переключения сливного и напорного клапана раздельно во времени и исключает утечки «короткого замыкания», однако имеет следующие недостатки: управление циклом молота по давлению не обеспечивает устойчивого рабочего процесса (постоянства хода, энергии удара, частоты ударов), так как вследствие утечек энергоносителя, непостоянного механического трения в направляющих ударной массы, изменения отскока и других факторов, переключения могут происходить на разных координатах положения ударной массы. Нестабильный, «пульсирующий» цикл особенно нежелателен при погружении свай, это затрудняет контроль процесса забивки и может привести к разрушению сваи.
Задачей изобретения является обеспечение устойчивости цикла работы гидравлического сваебойного молота за счет управления гидравлическими переключениями по положению ударной массы и заданным временным задержкам срабатывания электрогидравлических распределителей.
Сущность изобретения заключается в том, что управление молотом осуществляется путем переключения двух двухпозиционных клапанов, один из которых периодически сообщает поршневую полость гидроцилиндра со сливной магистралью, другой периодически сообщает поршневую полость гидроцилиндра со штоковой полостью, каждый клапан управляется от отдельного электрогидравлического распределителя, сигналы для переключений которых формируются за счет взаимодействия подвижного элемента молота с датчиком положения, причем открытие любого клапана начинается при полном или частичном закрытии другого клапана, при этом указанная последовательность переключения клапанов обеспечивается временными задержками срабатывания электрогидравлических распределителей, задаваемых контроллером от момента взаимодействия подвижного элемента молота с датчиком положения.
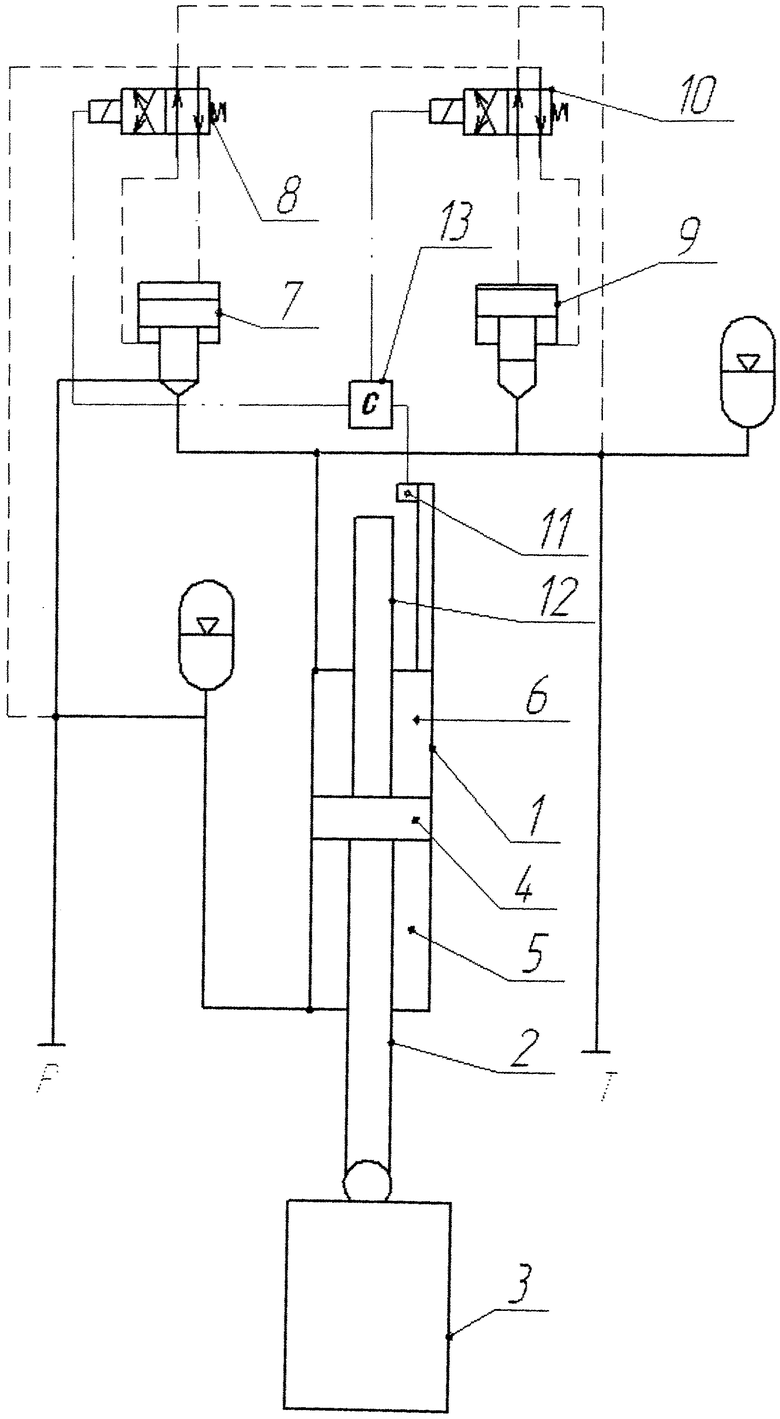
На чертеже приведена схема гидромолота, управление которого предлагается осуществить указанным способом.
Гидромолот содержит закрепленный на корпусе молота гидроцилиндр 1, шток 2 которого соединен с ударной массой 3. Поршень 4, соединенный со штоком 2, разделяет внутреннее пространство гидроцилиндра 1 на штоковую полость 5 и поршневую 6. В состав системы управления молотом входят также: напорный клапан 7, полости управления которого периодически сообщаются с напорной (Р) и сливной (Т) магистралями посредством электрогидравлического распределителя 8, сливной клапан 9, управляемый с помощью электрогидравлического распределителя 10 аналогичным образом. Система управления включает датчик положения 11, взаимодействующий с подвижным элементом молота, например дополнительным штоком 12, и контроллер 13, обеспечивающий переключение электрогидравлических распределителей 8 и 10 по команде датчика 11.
Система управления гидромолотом функционирует следующим образом.
В исходном положении ударная масса 3 оперта на забиваемый элемент, при соответствующих положениях электрогидравлических распределителей 8 и 10, напорный клапан 7 открыт, а сливной клапан 9 закрыт. Давление напорной линии, воздействуя на поршень с обеих сторон, удерживает поршень 4 и, соответственно, ударную массу в данном положении. При включении молота последовательно срабатывают электрогидравлические распределители 8 и 10, далее клапаны 7 и 9 соответственно, разобщая напорную линию с поршневой полостью 6 и коммутируя ее со сливной линией. Под действием разности давлений, действующей на поршень 4, ударная масса перемещается от забиваемого элемента, совершая холостой ход. На части хода дополнительный шток 12 пересекает створ датчика положения 11, что является сигналом для срабатывания распределителей 8 и 10 и соответствующих клапанов 7 и 9. Команда на срабатывание пилотов подается контроллером 13 с некоторой задержкой, задаваемой оператором молота, чем регулируется высота подъема ударной массы, и, соответственно, энергия удара. В программе управления заложено, что распределитель 10, управляющий сливным клапаном 9, срабатывает раньше, чем распределитель 8, вследствие меньшей задержки срабатывания, задаваемой контроллером 13 для распределителя 10, нежели распределителя 8. Соответственно, сливной клапан 9 закрывается раньше, чем открывается напорный клапан 7, при определенном смещении по времени срабатывания распределителей, сливной клапан 9 может полностью закрыться к моменту начала движения напорного клапана 7, тем самым полностью исключив утечку «короткого замыкания».
После переключения клапанов 7 и 9 ударная масса 3, под действием собственного веса и гидравлической силы, обусловленной разницей площадей поршневой 6 и штоковой 5 полостей, ударная масса затормаживается, останавливается и начинает движение в сторону забиваемого элемента, совершая рабочий ход. В предударный период, при прохождении дополнительным штоком 12 уровня датчика положения 11, контроллером 13 формируется сигнал для последующего переключения. Переключение, которое может состояться как в самом конце рабочего хода, так и в начале следующего холостого, осуществляется в обратной последовательности: по аналогичному алгоритму, сначала закрывается напорный клапан 7, затем открывается сливной клапан 9 и далее цикл повторяется.
Таким образом, при описанном способе управления гидромолотом, основанном на взаимодействии подвижного элемента молота с датчиком положения и последующими расчетными временными задержками срабатывания клапанов, обеспечивается устойчивый цикл работы машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДВИГАТЕЛЬ СВАЕБОЙНОГО МОЛОТА | 2016 |
|
RU2614829C1 |
| ГИДРОМОЛОТ | 1996 |
|
RU2109105C1 |
| ГИДРОДВИГАТЕЛЬ И ГИДРОМОЛОТ НА ЕГО ОСНОВЕ | 2013 |
|
RU2552287C1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2007 |
|
RU2354828C2 |
| Сваебойный многомассовый гидромолот | 1982 |
|
SU1092243A1 |
| КУЗНЕЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2505375C1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2480587C1 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВИЛИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2574623C1 |
| ГИДРОМОЛОТ | 2012 |
|
RU2517290C1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
Изобретение относится к гидромолотам для погружения в грунт железобетонных и стальных свай, шпунта и других забивных элементов. Способ управления сваебойным гидромолотом заключается в переключении двух двухпозиционных клапанов, один из которых периодически сообщает поршневую полость гидроцилиндра со сливной магистралью, другой периодически сообщает поршневую полость гидроцилиндра со штоковой полостью. Каждый клапан управляется от отдельного электрогидравлического распределителя, сигналы для переключений которых формируются контроллером при взаимодействия подвижного элемента молота с датчиком положения. Открытие любого клапана начинается при полном или частичном закрытии другого клапана, причем указанная последовательность переключения клапанов обеспечивается временными задержками срабатывания электрогидравлических распределителей, задаваемых контроллером от момента взаимодействия подвижного элемента молота с датчиком положения. Обеспечивается устойчивость цикла работы гидравлического сваебойного молота. 1 ил.
Способ управления сваебойным гидромолотом, заключающийся в переключении двух двухпозиционных клапанов, один из которых периодически сообщает поршневую полость гидроцилиндра со сливной магистралью, другой периодически сообщает поршневую полость гидроцилиндра со штоковой полостью, каждый клапан управляется от отдельного электрогидравлического распределителя, сигналы для переключений которых формируются контроллером при взаимодействия подвижного элемента молота с датчиком положения, отличающийся тем, что открытие любого клапана начинается при полном или частичном закрытии другого клапана, причем указанная последовательность переключения клапанов обеспечивается временными задержками срабатывания электрогидравлических распределителей, задаваемых контроллером от момента взаимодействия подвижного элемента молота с датчиком положения.
| ГИДРОМОЛОТ | 1996 |
|
RU2109105C1 |
| Система управления гидропневматическим молотом | 1987 |
|
SU1532174A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU831633A1 |
| Система управления гидравлического пресса | 1982 |
|
SU1050882A1 |
| Система управления гидравлическим прессом | 1985 |
|
SU1234217A1 |
| Гидрораспределитель управления шахтных механизированных крепей | 1986 |
|
SU1386757A1 |
| Свайный молот | 1986 |
|
SU1416611A1 |
| Свайный молот | 1991 |
|
SU1794135A3 |
| ВЕРТИКАЛЬНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2006 |
|
RU2334583C2 |
| JP 2000248546 A, 12.09.2000 | |||

