Изобретение относится к вооружению, в частности к торпедному оружию и способам его доставки к цели, может быть использовано в дальноходных парогазовых торпедах, предназначенных для разрушения гидротехнических и портовых сооружений. Технический результат - увеличение вероятности поражения гидротехнических и портовых сооружений.
Известны устройства наведения на цель прямоидущих торпед, основанные на применении способа инерциальной навигации [см. Дальноходная бесшумная прямоидущая торпеда 53-57, ru.wikipedia.org>53-57]. Достоинством такого технического решения является автономное функционирование бортовой системы управления торпеды, при котором реализуется принцип «выстрелил- забыл». При этом на маневрирование стреляющего корабля не накладываются ограничения, связанные с обеспечением наведения торпеды на цель и обеспечением собственной безопасности. Кроме того, такая торпеда не подвержена воздействию гидроакустических средств противоторпедной защиты. Однако недостатком данного решения является малая точность приведения торпеды в точку подрыва ее боеприпаса. Точность по курсу электрогироскопического прибора курса составляет порядка 1% от пройденной дистанции, поэтому эффективная стрельба по неподвижной цели не превышает 3,5…4,0 км [см. СПб государственный электротехнический университет «ЛЭТИ». Торпедное оружие. Методические указания для самостоятельной работы по дисциплине «Боевые средства флота и их боевое применение» УДК 623.946. п. 2.2.1]. Недостатком прямоидущих торпед является невозможность" их применения для разрушения гидротехнических и портовых сооружений, расположенных в закрытых рейдах, подход к которым требует маневрирования торпеды по курсу.
Отмеченные недостатки могут быть частично устранены в маневрирующей торпеде. В случае введения в программу функционирования электрогироскопического прибора курса такой торпеды соответствующих изменений курса следования торпеды по дистанции возможно было бы обеспечить огибание торпедой препятствий, закрывающих вход в закрытые рейды. Однако для этого требуется с достаточно большой точностью определять курс торпеды и истинное расстояние, пройденное торпедой, чтобы точно определять моменты изменения курса торпеды и углы отворота торпеды от прежнего курса. Для торпед, предназначенных для стрельбы по морским целям, достаточно определять относительное расстояние, пройденное торпедой в воде без учета скоростей ветровых и приливно-отливных течений, поскольку и торпеда и цель движутся в основном в одном потоке. Но в случае применения таких торпед для поражения гидротехнических и портовых сооружений, неточное определение расстояния, пройденного торпедой в воде, является существенным недостатком.
Известны торпеды, в которых взрыватели в боевое положение приводит устройство дальнего взведения [см. Патент РФ №2243496 «Контактное взрывательное устройство для торпед», МПК F42C 14/04]. В данном решении встречные потоки воды вращают вертушку, червяк которой при проходе торпедой 180…250 м приводит взрыватели в боевое положение [см. Торпедное оружие. Методические указания для самостоятельной работы по дисциплине «Боевые средства флота и их боевое применение. Санкт-Петербургский электротехнический университет «ЛЭТИ» (торпедное оружие | Pandia.ru)]. Но его недостатком является зависимость крутящего момента вертушки от условий обтекания торпеды встречным потоком и определение пройденного боеприпасом расстояния по скорости движения боеприпаса относительно воды, т.е. без учета скорости течения и плотности воды. Вследствие этого моменты изменения курса торпеды вынуждены устанавливать при проходе торпедой расстояния с учетом правила «трех сигм», что ухудшает тактические характеристики дальноходных торпед, для которых дистанция до точек изменения курса может составлять десятки км. Так, при указанной выше погрешности вертушки для расчетной дистанции 10 км команда на изменения курса будет формироваться при проходе торпедой 8,3…11,6 км. Кроме огибания препятствий, закрывающих вход в закрытые рейды, маневрирующая торпеда должна пройти относительно узкий подходный фарватер. Поскольку по месту расположения большинство военно-морских баз и крупных портов относятся к устьевым, расположенным на значительном расстоянии от моря в низовьях и на глубоководных участках рек или на искусственных каналах, прорытых от моря внутрь берега, то протяженность их входных фарватеров составляет десятки км [см. Алхименко А.П. Военно-морская география: Уч. пособие для поступающих в академию. Л.: ВМА. 1986, стр. 93, 94]. Из-за указанной выше погрешности электрогироскопического прибора курса и погрешности определения истинного расстояния, пройденного торпедой, вероятность наведения маневрирующей торпеды на гидротехнические и портовые сооружения, расположенные в закрытых рейдах, будет весьма низкой.
Недостаток, связанный с большой погрешностью вертушки можно частично устранить, если команду на изменение курса торпеды получать от прибора маневрирования, связанного с наружным гребным валом торпеды. Более эффективным решением было бы измерение пройденного расстояния торпедой по времени [см. Патент РФ №2492418 «Электронное временное устройство взрывателей и предохранительно-исполнительных механизмов», МПК F42C 11/06]. Но тогда определение пройденного боеприпасом расстояния будет осуществляться без учета изменений скорости движения боеприпаса относительно воды и без учета скорости течения воды. Обычно часовой механизм отсчета расстояния, пройденного боеприпасом, применяется для самоликвидации боеприпаса, когда роль погрешности в измерении расстояния не играет существенной роли. Измерение расстояния, пройденного торпедой, может производиться на основе электромеханического интегрирующего механизма, не имеющего выступающих за обводы корпуса торпеды частей и осуществляющего интегрирование скорости обтекающего торпеду потока воды [см. Изделие ТВ13. Техническое описание ТВ 13 ТО]. Однако он не устраняет недостаток, связанный с тем, что при этом не учитывается переносная скорость торпеды, обусловленная ветровым и приливно-отливным течениями.
Большая точность наведения на цель могла бы быть обеспечена в случае применения самонаводящейся торпеды [см. Патент РФ №2262067 «Торпеда с многоканальной системой самонаведения», МПК: F42B 19/00]. Ее система самонаведения позволяет разделить источники сигналов в пространстве и произвести их одновременную обработку для более точного наведения на цель. При этом в процессе обработки сигналов при поиске цели торпеда совершает только прямолинейное перемещение. Однако недостатки, связанные с прямолинейным движением торпеды до захвата цели системой самонаведения и с отсутствием решений, направленных на повышение точности хода торпедой по дистанции, не позволяют применять ее для поражения гидротехнических и портовых сооружений, расположенных в закрытых рейдах.
Аналогичные недостатки имеет более совершенная торпеда [см. Патент РФ №2422761 «Акустическая самонаводящаяся торпеда с пониженным шумом двигателя», МПК: F42B 19/00].
Наиболее близким техническим решением, обеспечивающим возможность увеличить точность торпеды и при этом огибать препятствия, может являться многорежимная парогазовая торпеда [см. Патент РФ №2187066 «Многорежимная парогазовая торпеда», МПК: F42B 19/00] - прототип.
В решении-прототипе в многорежимную парогазовую торпеду, включающую резервуары для горючего, окислителя и воды, дополнительно включены обтекаемый выдвижной воздухозаборник с механизмами его выдвижения и возврата, нагнетатель, привод механизма воздухозаборника и нагнетателя, блок изменения глубины хода торпеды. Увеличение дальности хода торпеды осуществляется за счет нагнетани в резервуар для окислителя воздуха через выдвижной воздухозаборник после того, как запас окислителя - чистого кислорода будет на исходе. Этим обеспечивается увеличение бортовых запасов горючего и воды на торпеде за счет уменьшения бортового запаса окислителя. Недостающий окислитель берется из атмосферного воздуха, который при израсходовании запаса окислителя и подвсплытии торпеды нагнетается в резервуар для окислителя через выдвижной воздухозаборник. Указанное решение целесообразно реализовать именно в парогазовых торпедах, так как только такие торпеды могут применяться для поражения гидротехнических и портовых сооружений, когда приоритет отдается дальности хода торпеды, а не ее скорости или скрытности хода торпеды. Однако решение-прототип обеспечивает только увеличение дальности хода торпеды, но не устраняет недостатки, связанные с точностью выхода торпеды в точку подрыва ее боеприпаса.
Задачей заявляемого изобретения является устранение отмеченных недостатков, а именно увеличение вероятности поражения гидротехнических и портовых сооружений за счет увеличения точности наведения торпеды на цель.
Технический результат достигается включением новых устройств и иной связью между ними в многорежимной парогазовой торпеде, включающей инерциальную систему навигации, обтекаемый выдвижной воздухозаборник, механизм выдвижения и возврата обтекаемого выдвижного воздухозаборника, заключающихся в том, что в нее дополнительно введен приемник спутниковой навигации, инерциальная система навигации выполнена с возможностью ее корректировки во время движения торпеды, механизм выдвижения и возврата обтекаемого выдвижного воздухозаборника выполнен с возможностью установки на нем концевого включателя, обтекаемый выдвижной воздухозаборник выполнен с возможностью установки на нем антенны приемника спутниковой навигации, которая установлена на оконечности обтекаемого выдвижного воздухоприемника и своим выходом соединена с входом инерциальной системы навигации через концевой включатель механизма выдвижения и возврата обтекаемого выдвижного воздухозаборника и приемник спутниковой навигации.
Идея предложенного технического решения заключается в приеме сигналов спутниковой навигации и корректировки в соответствии с принятыми данными системы инерциальной навигации торпеды. При этом прием данных осуществляется с помощью приемника спутниковой навигации, антенна которого установлена на оконечности обтекаемого выдвижного воздухоприемника. Способ корректировки инерциальной системы навигации по информации от спутниковой навигации известен и широко распространен в крылатых ракетах. Все американские крылатые ракеты на сегодняшний день оснащены приемником GPS и пакетом инерциальной системы наведения [см. army-news/ru/2012/08/metody-navigacij-krylatyx…].
Покажем существенность отличительных признаков.
Введение в торпеду приемника спутниковой навигации является новым решением. Поскольку движение торпед-аналогов происходит под слоем воды, не пропускающим электромагнитные волны диапазона рабочих частот систем спутниковой навигации, на известных торпедах указанные приемники не устанавливаются. В предложенном решении антенна приемника спутниковой навигации, установленная на оконечности обтекаемого выдвижного воздухоприемника находится над водой достаточно продолжительное время, необходимое для накачки воздуха в резервуар для окислителя. Этого времени вполне достаточно для приема информации от систем спутниковой навигации, что позволяет с большой точностью определять текущие координаты торпеды.
Выполнение инерциальной системы навигации торпеды с возможностью ее корректировки во время движения торпеды является новым решением. Оно позволяет определить отклонение торпеды от заданного маршрута и произвести соответствующие корректировки программы движения торпеды по заданному маршруту.
Введение в торпеду дополнительно приемника спутниковой навигации является новым решением. Оно обеспечивает прием информации от системы спутниковой навигации и в соответствии с ней при выдвинутом обтекаемом выдвижном воздухозаборнике с большой точностью определять текущие координаты торпеды.
Выполнение обтекаемого выдвижного воздухозаборника с возможностью установки на нем антенны приемника спутниковой навигации и установка ее на оконечности обтекаемого выдвижного воздухозаборника является новым решением. Оно позволяет с наибольшей вероятностью принимать сигналы спутниковой навигации, а также исключить необходимость выполнения приемника спутниковой навигации равнопрочным с корпусом торпеды.
Соединение антенны приемника спутниковой навигации своим выходом с входом инерциальной системы навигации через механизм выдвижения и возврата обтекаемого выдвижного воздухозаборника и приемник спутниковой навигации является новым решением. Оно позволяет включать приемник спутниковой навигации и начинать осуществлять корректировку маршрута торпеды только при выдвинутом обтекаемом выдвижном воздухозаборнике, когда прием информации от спутниковой навигации возможен.
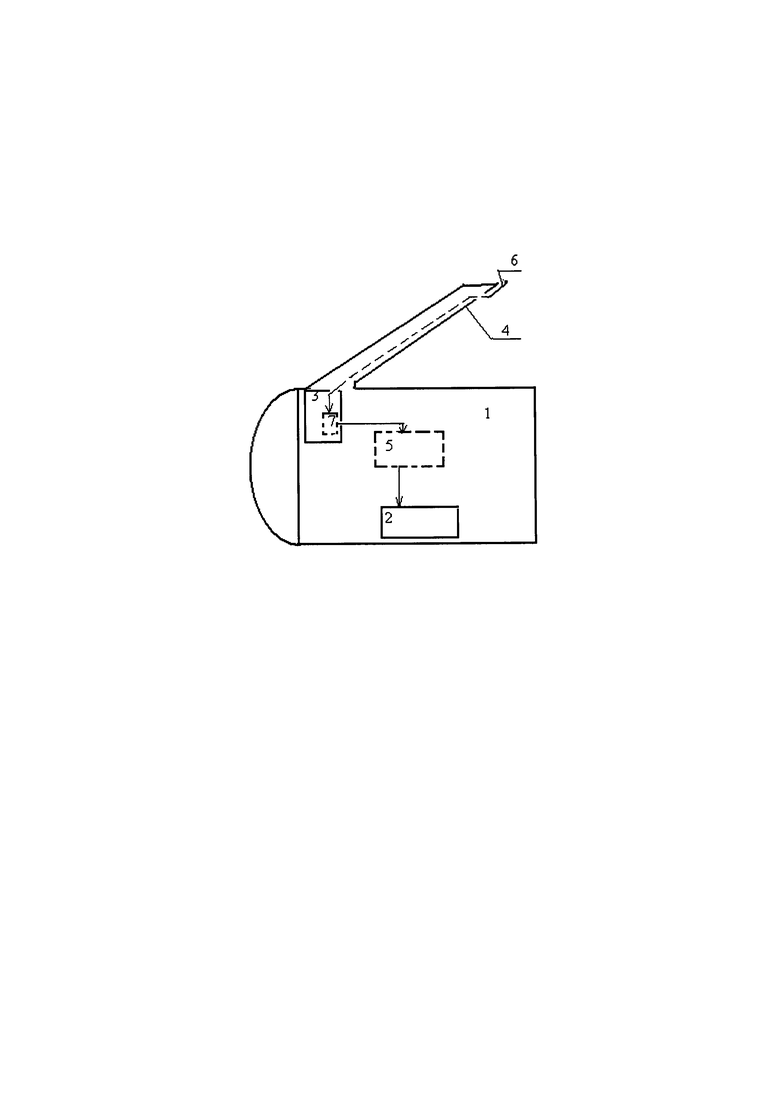
Сущность предлагаемого технического решения поясняется чертежом, на котором представлена схема предлагаемой многорежимной парогазовой торпеды. Многорежимная парогазовая торпеда содержит:
1 - торпеда,
2 - инерциальная система навигации,
3 - механизм выдвижения и возврата обтекаемого выдвижного воздухозаборника,
4 - обтекаемый выдвижной воздухозаборник,
Узлы 1-4 содержит прототип. Дополнительно к ним в многорежимную парогазовую торпеду введены новые узлы и связи между ними:
5 - приемник спутниковой навигации. Современные приемники спутниковой навигации выполнены в размерах, позволяющих поместить его в сотовом телефоне.
6 - антенна приемника спутниковой навигации. Такое разнесение по месту установки приемника спутниковой навигации и его антенны позволяет исключить нежелательное выполнение корпуса приемника спутниковой навигации равнопрочным с корпусом торпеды.
7 - концевой включатель.
Предлагаемая многорежимная парогазовая торпеда функционирует следующим образом.
В исходном состоянии, когда торпеда 1 движется под водой, ее истинная траектория с увеличением пройденного торпедой расстояния все больше и больше отклоняется от намеченной траектории. Когда торпеда 1 подвсплывает и выдвигает над водой оконечность обтекаемого выдвижного воздухозаборника 4 с установленной на ней антенны приемника спутниковой навигации 6, механизм выдвижения и возврата обтекаемого выдвижного воздухозаборника 3 своим концевым включателем 7 подключает антенну приемника спутниковой навигации 6 к приемнику спутниковой навигации 5. Приемник спутниковой навигации 5 включается и через некоторое время, необходимое для установлении связи с требуемым количеством спутников, информация о текущих координатах торпеды 1 с выхода приемника спутниковой навигации 5 поступает на вход инерциальной системы навигации 2. Осуществляется сравнение истинных текущих координат торпеды с соответствующими координатами в электронной памяти инерциальной системы навигации 2 и осуществляется соответствующая корректировка маршрута торпеды. Когда обтекаемый выдвижной воздухозаборник 4 возвращается в исходное состояние, процесс корректировки инерциальной системы навигации прекращается и возобновляется вновь при следующем выдвижении обтекаемого выдвижного воздухозаборника 4. Благодаря таким корректировкам инерциальной системы навигации 2, обеспечивается точное следование торпеды 1 по проложенному маршруту с огибанием препятствий по пути следования торпеды 1 к намеченной цели - гидротехническому или портовому сооружению в закрытых рейдах портов или военно-морских баз.
Таким образом, на основе анализа структуры и функционирования схемы предложенного технического решения можно заключить, что многорежимная парогазовая торпеда обладает преимуществами, отвечающими поставленной задаче - увеличение вероятности поражения гидротехнических и портовых сооружений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОРЕЖИМНАЯ ПАРОГАЗОВАЯ ТОРПЕДА | 1999 |
|
RU2187066C2 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2769806C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 2019 |
|
RU2717578C1 |
| САМОХОДНЫЙ ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2688562C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| СВЕРХЗВУКОВАЯ РАКЕТА | 2017 |
|
RU2686567C2 |
Изобретение относится к торпедному оружию и способам его доставки к цели, может быть использовано в дальноходных парогазовых торпедах, предназначенных для разрушения гидротехнических и портовых сооружений. Торпеда включает инерциальную систему навигации, обтекаемый выдвижной воздухозаборник с механизмом его выдвижения и возврата. В торпеду дополнительно введен приемник спутниковой навигации. Инерциальная система навигации выполнена с возможностью ее корректировки во время движения торпеды. Механизм выдвижения и возврата обтекаемого выдвижного воздухозаборника выполнен с возможностью установки на нем концевого включателя. Обтекаемый выдвижной воздухозаборник выполнен с возможностью установки на нем антенны приемника спутниковой навигации, которая установлена на оконечности обтекаемого выдвижного воздухоприемника и своим выходом соединена с входом инерциальной системы навигации через концевой включатель механизма выдвижения и возврата обтекаемого выдвижного воздухозаборника и преемник спутниковой навигации. Технический результат заключается в повышении вероятности поражения гидротехнических и портовых сооружений.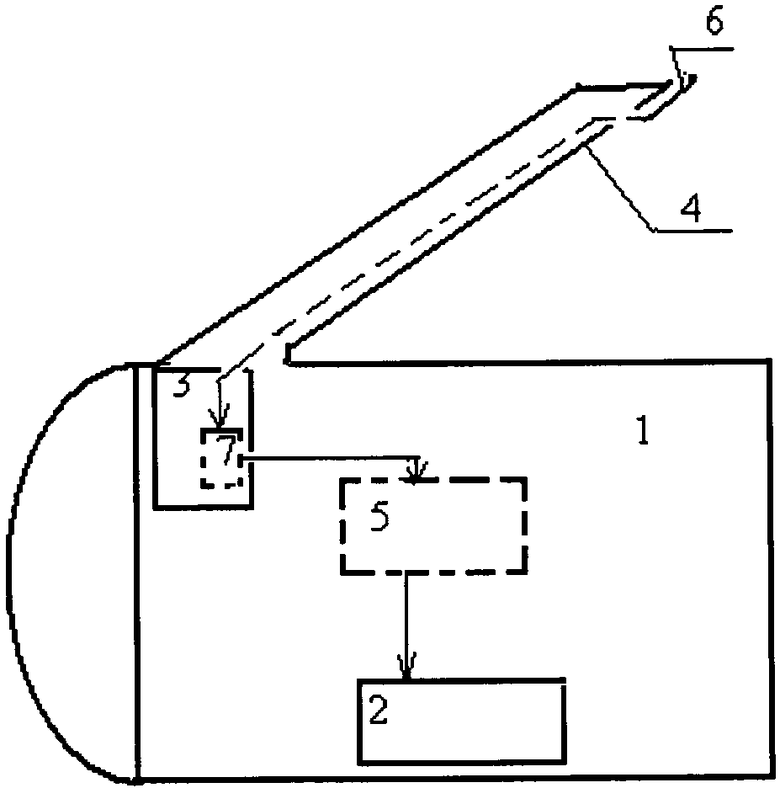
Многорежимная парогазовая торпеда, включающая инерциальную систему навигации, обтекаемый выдвижной воздухозаборник с механизмом его выдвижения и возврата, отличающаяся тем, что в нее дополнительно введен приемник спутниковой навигации, инерциальная система навигации выполнена с возможностью ее корректировки во время движения торпеды, механизм выдвижения и возврата обтекаемого выдвижного воздухозаборника выполнен с возможностью установки на нем концевого включателя, обтекаемый выдвижной воздухозаборник выполнен с возможностью установки на нем антенны приемника спутниковой навигации, которая установлена на оконечности обтекаемого выдвижного воздухоприемника и своим выходом соединена с входом инерциальной системы навигации через концевой включатель механизма выдвижения и возврата обтекаемого выдвижного воздухозаборника и приемник спутниковой навигации.
| МНОГОРЕЖИМНАЯ ПАРОГАЗОВАЯ ТОРПЕДА | 1999 |
|
RU2187066C2 |
| ТОРПЕДА С МНОГОКАНАЛЬНОЙ СИСТЕМОЙ САМОНАВЕДЕНИЯ | 2002 |
|
RU2262067C2 |
| САМОВЫРАВНИВАЮЩАЯСЯ ТОРПЕДА | 2005 |
|
RU2333456C2 |
| ТОРПЕДА | 2014 |
|
RU2571664C1 |
| ПОДВОДНЫЙ АППАРАТ-ОХОТНИК | 2017 |
|
RU2654435C1 |
| US 4989530 A, 05.02.1991. | |||

