Настоящее изобретение относится к космической технике, в частности к механизму передачи движения элементам конструкции батареи солнечной, гармоникобразно сложенной на космическом аппарате с помощью шарнирных сочленений, каждое из которых содержит круглый шкив, который соединен с одним элементом жестко, а с соседним элементом с возможностью вращения.
Из существующего уровня техники известен механизм передачи движения гибкой связью (патент RU 97178 U1 F16H 19/06 27.08.2010), содержащий установленные на неподвижной раме ведущую и ведомую звездочки, охватываемые гибкой связью, которая соединена с тягой исполнительного органа, отличающийся тем, что гибкая связь подвижно соединена при помощи ползуна с тягой исполнительного органа, которая выполнена в виде вертикальной направляющей.
Из существующего уровня техники известен механизм для открытия гармоникообразносложенных структурных элементов (патент US 3733758 B64G 1/10 29.04.1971), содержащий приводное средство, состоящее из двух дисков, каждый из которых жестко соединен с соответствующим конструктивным элементом, и связанных друг с другом замкнутым ремнем, соединенного с указанными дисками для передачи движения. Приводное средство соединяет два конструктивных элемента, которые вращаются в одном и том же направлении под действием торсионных пружин. Путем соответствующего выбора диаметра диска определяется положение конструктивных элементов после разворачивания.
Из существующего уровня техники наиболее близким к заявленному решению (прототипом) является механизм передачи движения гибким звеном (трос, канат, ремень, лента, цепь и т.д.) посредством двух круглых шкивов, один из которых ведущий, а другой ведомый, при этом передаточное отношение такого механизма равно обратному отношению радиусов ведущего и ведомого шкива. (И.И. Артоболевский. Теория механизмов. М., 1965 г., 776 стр. с илл., редактор В.А. Зиновьев, стр. 267-269).
Недостатками конструктивных решений описанных выше является зависимость передаточного отношения механизма от величины радиусов ведущего и ведомого шкива, что может привести к увеличению массы и габаритов этого механизма.
Задача, на решение которой направлено заявляемое изобретение, заключается в том, чтобы создать механизм передачи движения в части обеспечения заданного передаточного отношения, за счет изменения конструкции гибкого звена.
Поставленная задача предлагаемого изобретения достигается за счет механизма передачи движения посредством двух круглых шкивов, один из которых ведущий, а другой ведомый. Движение определенному элементу конструкции батареи солнечной передается двумя гибкими звеньями, одно гибкое звено имеет кинематическую связь с первым шкивом и двумя свободными блоками, которые могут вращаться вокруг своей оси, охватывая их и формируя два полиспаста таким образом, что концы звена жестко соединены с деталью, установленной на этом шкиве с возможностью вращения вокруг него, второе гибкое звено имеет кинематическую связь, со вторым шкивом охватывая его таким образом, что концы звена соединены с полиспастами, сформированными первым гибким звеном, образуя две тяги, передающие движение, при этом передаточное отношение такого механизма равно обратному, если второй шкив ведущий, а первый ведомый, или прямому, если первый шкив ведущий, а второй ведомый, отношению диаметра второго шкива и радиуса первого шкива.
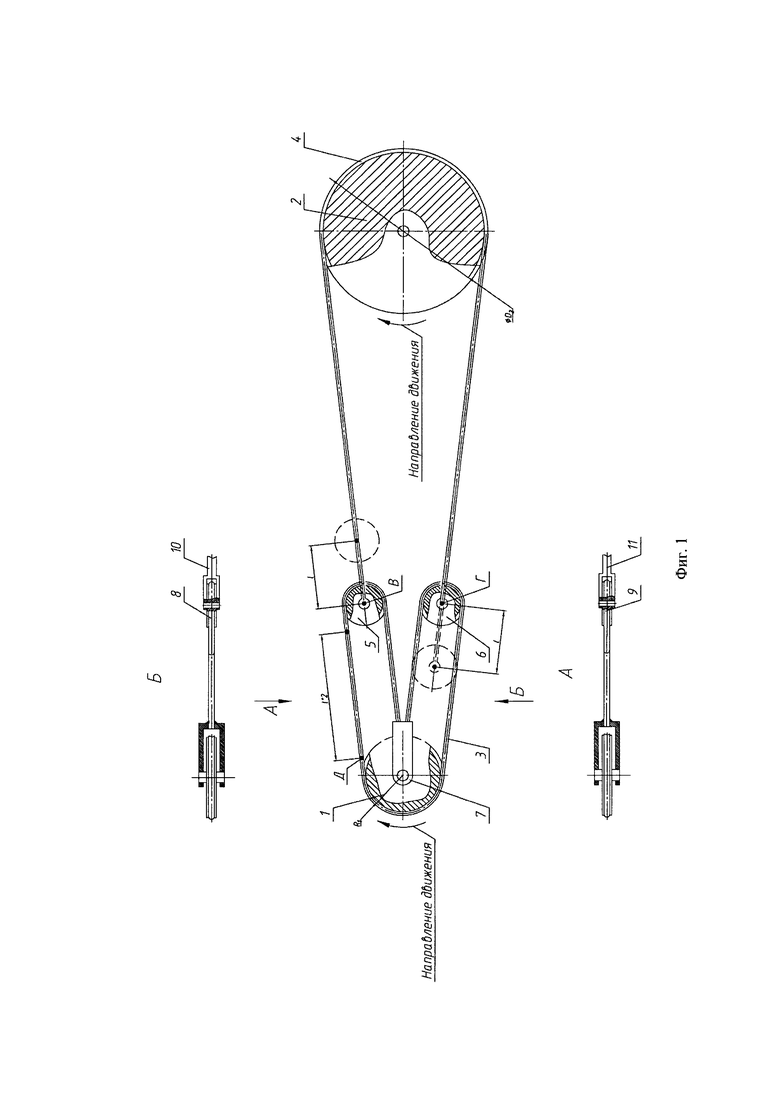
На фиг. 1 представлен общий вид механизма передачи движения с гибкими звеньями.
Механизм передачи движения состоит из двух круглых шкивов 1, 2 и двух гибких звеньев 3, 4. Гибкое звено 3 имеет кинематическую связь со шкивом 1 и свободными блоками 5, 6, которые могут вращаться вокруг своей оси, охватывая их и формируя два полиспаста 8, 9 таким образом, что концы звена жестко соединены с деталью 7, установленной на этом шкиве с возможностью вращения вокруг него. Гибкое звено 4 имеет кинематическую связь, со шкивом 2 охватывая его таким образом, что концы звена соединены с полиспастами 7, 8, сформированными гибким звеном 3, образуя две тяги 10, 11, передающие движение. Передаточное отношение такого механизма равно:
 - если шкив поз. 2 ведущий, а шкив поз. 1 ведомый;
- если шкив поз. 2 ведущий, а шкив поз. 1 ведомый;
 - если шкив 1 ведущий, а шкив поз. 2 ведомый,
- если шкив 1 ведущий, а шкив поз. 2 ведомый,
где:
i21 и i12 - передаточное отношение механизма;
R1 - радиус первого шкива;
D2 - диаметр второго шкива.
Передача движения происходит двумя тягами 10, 11 сформированными полиспастами 8, 9 и гибким звеном 4 посредством двух круглых шкивов 1 и 2, один из которых ведущий, а другой ведомый. При движении ведущего шкива соответствующее гибкое звено обкатывается по этому шкиву, приводя в движение тяги 10, 11, которые передают движение, на ведомый шкив, воздействуя на соответствующее гибкое звено, которое обкатываясь вокруг этого шкива, двигает его. То есть для поворота шкива 2 и смещения точки «В» и «Г» (Фиг. 1) на расстояние равное  необходимо гибкое звено 3 протянуть через полиспасты 8, 9, то есть смесить точку «Д» на расстояние
необходимо гибкое звено 3 протянуть через полиспасты 8, 9, то есть смесить точку «Д» на расстояние  повернув шкив 1, передав движение на шкив 2 и наоборот. Таким образом, за счет использования полиспастов как гибкое звено для передачи движения от одного шкива к другому обеспечивается заданное передаточного отношения за счет изменения конструкции гибкого звена.
повернув шкив 1, передав движение на шкив 2 и наоборот. Таким образом, за счет использования полиспастов как гибкое звено для передачи движения от одного шкива к другому обеспечивается заданное передаточного отношения за счет изменения конструкции гибкого звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Бесступенчатый вариатор | 2019 |
|
RU2711843C1 |
| ПЕДАЛЬНЫЙ ПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2417918C2 |
| УСТРОЙСТВО БЕССТУПЕНЧАТОГО ВАРИАТОРА С ПРИВОДОМ ВЕДУЩЕГО ЗВЕНА ЧЕРЕЗ РЫЧАГИ И ИЗМЕНЯЕМУЮ ТОЧКУ ПРИЛОЖЕНИЯ ВНЕШНИХ СИЛ ВРАЩЕНИЯ | 2013 |
|
RU2578797C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПАРУСНАЯ УСТАНОВКА ДЛЯ ОТБОРА ЭНЕРГИИ ПОТОКА | 2011 |
|
RU2518763C2 |
| Трансмиссия транспортного средства | 1990 |
|
SU1712205A1 |
Настоящее изобретение относится к области машиностроения, а более конкретно к передачам с гибкими звеньями. Механизм передачи движения посредством двух круглых шкивов снабжен двумя гибкими звеньями и двумя свободными блоками. Одно гибкое звено имеет кинематическую связь с первым шкивом и двумя свободными блоками, которые могут вращаться вокруг своей оси. Указанное звено, охватывая их, формирует два полиспаста таким образом, что концы звена жестко соединены с деталью, установленной на этом шкиве с возможностью вращения вокруг него. Второе гибкое звено имеет кинематическую связь со вторым шкивом, охватывая его таким образом, что концы звена соединены с полиспастами, сформированными первым гибким звеном, образуя две тяги. Передаточное отношение механизма равно отношению диаметра одного шкива к радиусу другого. Достигается обеспечение передаточного отношения. 1 ил.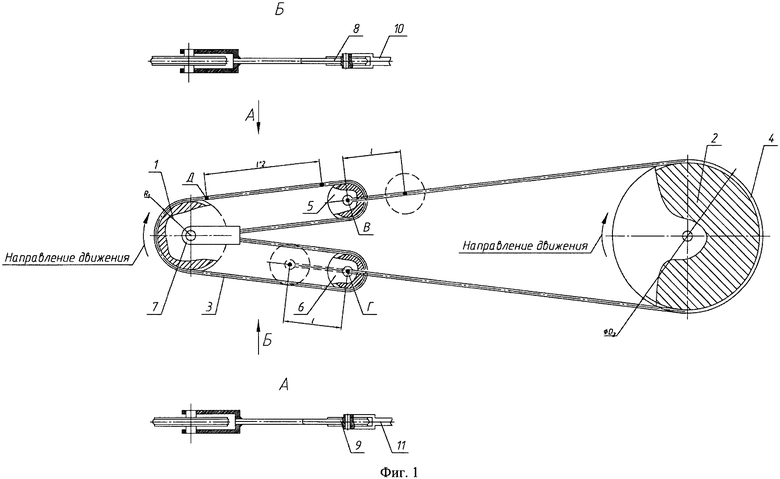
Механизм передачи движения посредством двух круглых шкивов, один из которых ведущий, а другой ведомый, отличающийся тем, что движение передается двумя гибкими звеньями, одно гибкое звено имеет кинематическую связь с первым шкивом и двумя свободными блоками, которые могут вращаться вокруг своей оси, охватывая их и формируя два полиспаста таким образом, что концы звена жестко соединены с деталью, установленной на этом шкиве с возможностью вращения вокруг него, второе гибкое звено имеет кинематическую связь со вторым шкивом, охватывая его таким образом, что концы звена соединены с полиспастами, сформированными первым гибким звеном, образуя две тяги, передающие движение, при этом передаточное отношение такого механизма равно обратному, если второй шкив ведущий, а первый ведомый, или прямому, если первый шкив ведущий, а второй ведомый, отношению диаметра второго шкива и радиуса первого шкива.
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ С ГИБКИМИ ЗВЕНЬЯМИ (ВАРИАНТЫ) | 2000 |
|
RU2160935C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ТРАНСПОРТИРОВАНИЯ | 0 |
|
SU336253A1 |
| CA 2918495 A1, 05.02.2015 | |||
| WO 2013050824 A1, 11.04.2013. | |||

