Изобретение относится к винтокрылым летательным аппаратам и может быть использовано в конструкции мультикоптеров, в том числе, квадрокоптеров с дистанционным управлением для осуществления обучения пользователей управлению летательным аппаратом или для развлечений.
Известен корпус рамы летательного аппарата, содержащий раму, которая окружает корпус летательного аппарата, включая вращающиеся винты с корпусом летательного аппарата, прикрепленным к раме; и множество колес, с возможностью вращения, при этом рама выполнена трубчатой формы (см. US 2017/0050726 А1).
Недостатками известного решения являются громоздкость летательного аппарата, снабженного такой рамой, а также большая итоговая масса летательного аппарата и связанный с этим избыточно высокий расход энергии на обеспечение полета. Избыточные массогабаритные параметры влекут повышение инерционности и связанную с этим сложность управления летательным аппаратом.
Известно устройство для очистки включающее летательный аппарат с двигателями и предохранительный каркас для защиты роторов (см. WO 2017/008776 А1).
Недостатками известного устройства являются избыточная масса и габариты, что обусловлено тем, что наличие дополнительного элемента в виде общего для всех роторов предохранительного каркаса при наличии индивидуальных защитных колец роторов, как это показано на чертежах, делает устройство больше и тяжелее.
Известен летательный аппарат, который содержит: формованный каркасный узел, включающий в себя центральный корпус, образованный из верхнего элемента, имеющего, по меньшей мере, три плеча, выполненных за одно целое с и простирающихся наружу от центрального корпуса, и нижний элемент, имеющий, по меньшей мере, три опоры, выполненные за одно целое с и проходящие вниз; по меньшей мере, три узла двигателя, каждый из которых включает в себя электромеханический двигатель и, по меньшей мере, один соответствующий пропеллер, установленный с возможностью установки вниз; узел печатной платы, функционально установленный на центральном корпусе и выполненный с возможностью управления судном радиочастотными сигналами от портативного дистанционного управления и сменный перезаряжаемый аккумулятор, вставляемый в отсек для батареи, определяемый верхним элементом и нижним элементом, и функционально подключаемый к электрической мощности сборки печатной платы и по меньшей мере трех узлов двигателя, при этом летательный аппарат содержит съемное безопасное кольцо, установленное и простирающееся в периферической части рычагов и выполненное с возможностью защиты пропеллеров от бокового контакта (см. US 2015/0273351 А1).
Недостатками известного решения являются, во-первых, большие габариты, обусловленные наличием кольца безопасности, которое выступает за линии, крайних точек пропеллеров по боковым сторонам устройства, а также наличием выступающих частей устройства в вертикальном направлении. Сверху это корпуса двигателей, а снизу - элементы опоры. Во-вторых, пропеллеры, установленные на оси снизу двигателей особенно уязвимы при вертикальном падении, так как при ударе о грунт, даже без деформации кольца безопасности пропеллер взаимодействует с рельефом грунта, что приводит к выходу из строя не только пропеллера, но и двигателя из-за деформации оси. Указанный недостаток усиливается тем, что масса двигателей, закрепленных на расстоянии от центра при вертикальном ударе в силу инерции стремится опрокинуть известное устройство на бок относительно площади опоры, что приводит к дополнительному механическому воздействию на пропеллер и ось двигателя. В-третьих, конструкция известного устройства, выполненная из множества отдельных соединенных между собой деталей, способствует резонансному раскачиванию легких деталей конструкции, выбирающему малейшие люфты соединений при наличии вибрации от двигателей. Это ухудшает надежность известного решения, ограничивая область его применения, а также влияет на управляемость полета.
Наиболее близким по технической сущности - прототипом является дрон поворотное крыло с опорной конструкцией, содержащей, по меньшей мере, первый рычаг, содержащий центральную часть, с радиальными от 3 до 12 компланарными ответвлениями, приспособленными для монтажа двигателей и пропеллеры дрона, в которых упомянутый первый рычаг опорной конструкции также содержит от 3 до 12 защитных кольца, расположенных вокруг центральной втулки выполненных с возможностью закрепления на центральной части упомянутого первого рычага опорной конструкции, причем каждое из указанных защитных колец расположено вокруг каждого из пропеллеров, которые не выступают вертикально за защитные кольца; центральная часть и рычаги, проходящие в радиальном направлении от опорной структуры первого рычага образуют целостный и унитарный корпус, изготовленный из вспененного полимера, имеющего плотность от 20 до 100 г/л измеренный в соответствии с ISO 845:2006, а защитные кольца образуют интегральное и унитарное тело, также выполненное из вспененной смолы, имеющей плотность от 20 до 100 г/л, измеренную в соответствии со стандартом ISO 845:2006; в результате чего пропеллеры защищены от бокового удара (См. ЕР 3116780 В1).
Предполагается, что при столкновении с человеком соответствующая часть мягкого защитного кольца, образующего, защитную оболочку, должна сминаться с тем, чтобы предотвратить травму, или смягчить последствия удара.
Однако известно, что для создания горизонтальной тяги плоскость несущего винта должна иметь наклон в сторону движения, то есть в момент столкновения дрона с препятствием, расположенным на его пути, плоскость дрона наклонена в сторону движения, причем наклон тем больший чем выше скорость движения дрона. Смятие же кольца в случае столкновения при горизонтальном полете происходит в направлении, противоположном движению, то есть под углом к плоскости наклоненного дрона. В итоге кольцо сминается не в направлении несущего винта, а загибается ниже, под винт, обнажая его. Внешняя режущая кромка на окончании несущего винта, особенно опасна для препятствия, поэтому отсутствие ограничения деформируемой части кольца создает высокую вероятность травмы от вращающегося винта при столкновении. Таким образом, если несущий винт, согласно формулы известного решения всего лишь не выступает вертикально за плоскость кольца, то этого недостаточно для предотвращения угрозы травмирования при столкновении с человеком. Известное решение может обеспечить защиту при статических режимах, но не при столкновении в полете.
Более того, при столкновении с препятствием происходит смятие кольца, в результате которого поверхность кольца соприкасается с передним несущим винтом, останавливая его вращение. При этом сам дрон движется по инерции, а задние винты продолжая вращаться и создавая тягу, вызывают опрокидывание дрона на препятствие, что, в свою очередь, грозит причинением дальнейших травм или повреждений препятствию от вращения остальных несущих винтов. Указанные недостатки снижают безопасность использования известного решения и ограничивает тем самым возможности использования известного решения в многолюдных местах.
Другой недостаток также связан с возможностью смятия кольца, при котором происходит взаимодействие кольца с вращающимся винтом. Несущий винт представляет собой объемную фигуру, так, что даже при смятии кольца в момент столкновения в направлении под винт внутренняя поверхность кольца соприкасается с вращающимся с высокой скоростью винтом вызывая его деформацию и, как следствие, выход из строя винта. Для дальнейшего использования несущий винт должен быть заменен.
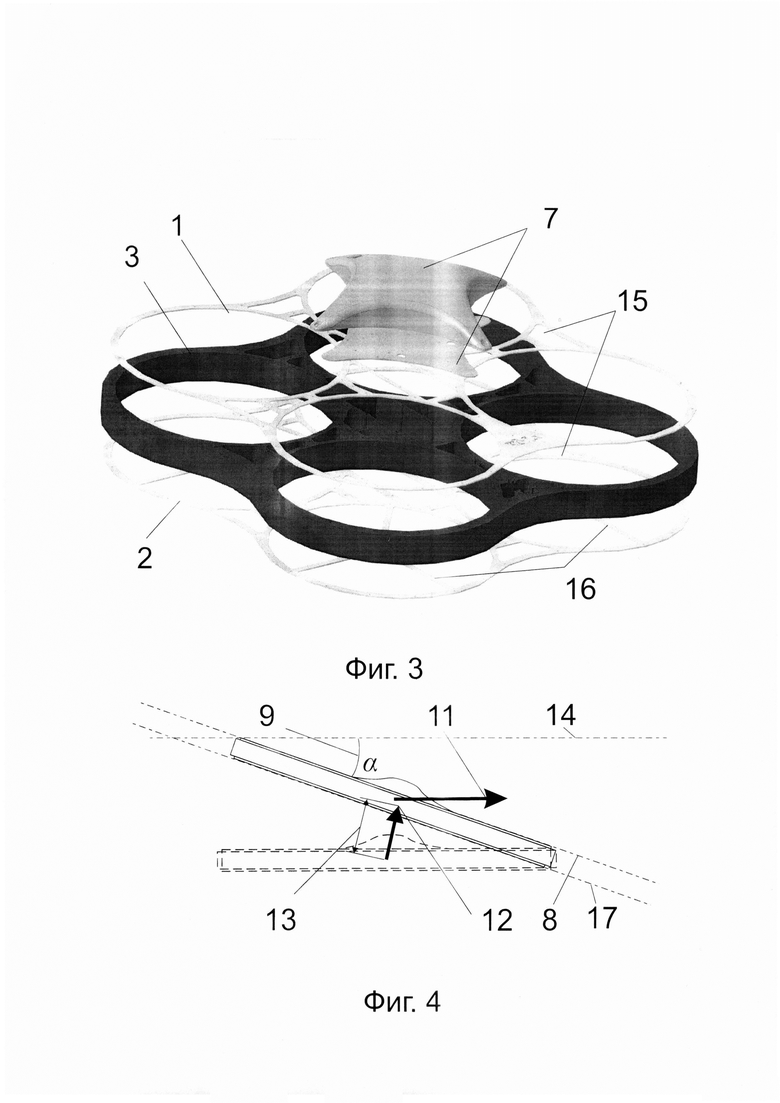
Еще один недостаток связан с конструкцией известного решения, в котором опорная конструкция выполнена в виде радиальных лучей, сходящихся к центральной части, находящейся ниже плоскости защитных колец. В такой конструкции центр тяжести находится ниже плоскости несущих винтов и для создания горизонтальной тяги наклон плоскости винтов должен обеспечить перемещение центра тяжести примерно на величину b=c×sin α,
где: с - расстояние между центром тяжести и плоскостью несущих винтов;
α - угол наклона плоскости винтов.
Расстояние, на которое должен быть перемещен центр тяжести пропорционально величине удаления центра тяжести от плоскости винтов, соответственно, чем больше это расстояние, тем большая работа должна быть совершена при наклоне плоскости для получения горизонтальной тяги, то есть тем большие затраты электроэнергии необходимы для осуществления маневрирования.
Места установки двигателей в известном решении и бокс в центральной части для размещения контроллера находятся на едином корпусе, вследствие чего вибрации от работающих двигателей прикладываются к контроллеру с его чувствительными датчиками, в том числе акселерометрами, что приводит к ошибкам в соответствующих измерениях при осуществлении полета дрона. Ошибочные показания датчиков усложняют полет, ухудшают его управляемость, а также негативно влияют на надежность соединения электрических коннекторов, что является недостатком известного решения и ограничивает область его применения.
При вертикальном падении известное решение соприкасается с поверхностью земли в первую очередь нижней центральной частью, которая принимает на себя всю силу удара и при сильном ударе может быть даже разрушена, после чего дрон накреняется и ударяется боковой частью, т.е. соответствующим кольцом, которое изгибается вверх и обнажает вращающийся винт, который, в результате цепляет грунт, что, в свою очередь приводит к выходу соответствующих несущих винтов из строя. Такая уязвимость конструкции при вертикальном падении также является недостатком известного решения.
Объемная конструкция дрона, предполагающего наличие заниженной центральной части, наличие выступающих снизу опор, рельефный характер лучей и других элементов конструкции не позволяют известному решению достигать мобильности в сложных условиях наличия препятствий в силу риска зацепления выступающей частью конструкции за ветки или иное препятствие, или за рядом летящий дрон. Последствием зацепления за препятствие является потеря ориентации и падение дрона.
Техническим результатом является:
- исключение возможности соприкосновения внешней режущей кромки несущих винтов с препятствием при столкновении в горизонтальном полете, обеспечивающее расширение области применения,
- уменьшение вероятности поломки несущих винтов из-за их соприкосновения с внутренней частью бампера при его деформировании от столкновения, обеспечивающее повышение надежности,
- снижение вероятности разрушения конструкции при вертикальном падении, обеспечивающее повышение надежности,
- снижение энергозатрат при маневрировании,
- улучшение надежности управления за счет снижения влияния вибрации от двигателей,
- повышение мобильности в условиях, осложненных наличием препятствий.
Указанный технический результат достигается тем, что в мультикоптере, содержащем электродвигатели с несущими винтами и кольца из полимерного материала, указанные кольца из полимерного материала закреплены между двумя верхней и нижней параллельными и соединенными между собой посредством стоек пластинами, образующими индивидуальные защитные кольца вокруг вращающихся несущих винтов, при этом электродвигатели установлены на опорных рычагах одной из пластин, а несущий винт не выступает за плоскости внешних поверхностей пластин.
Кроме того:
- пластины выполнены в виде колец, количество которых соответствует количеству несущих винтов;
- верхняя и нижняя пластины выполнены монолитными в виде двух единых деталей;
- стойки выполнены в виде металлических стержней;
- кольца из полимерного материала выполнены в виде единой детали, форма внешнего периметра которой соответствует форме внешнего периметра пластин.
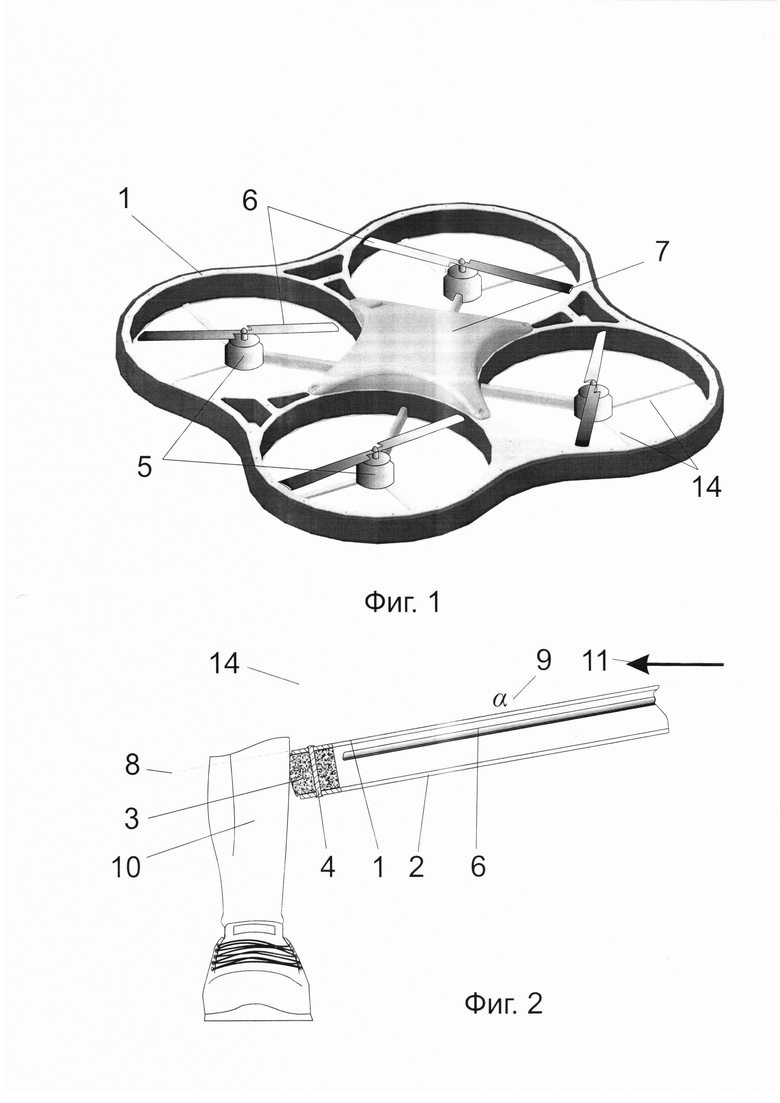
Мультикоптер поясняется с помощью чертежей, где на Фиг 1 показан общий вид мультикоптера, на Фиг. 2 - деформация бампера в результате столкновения с препятствием, на Фиг. 3 - схема соединения конструктивных элементов мультикоптера, на Фиг 4 - схема перемещения центра тяжести мультикоптера при переходе к горизонтальному движению,
На чертежах сделаны следующие обозначения:
1 и 2 - верхняя и нижняя кольцеобразные пластины, соответственно, 3 - кольцо из полимерного материала или бампер, 4 - алюминиевые стойки или шпильки для жесткого соединения кольцеобразных пластин, 5 - электродвигатель, 6 - несущий винт, 7 - крышка отсека для размещения контроллера и батареи источника питания; 8 - плоскость внешней поверхности верхней пластины, 9 - угол α наклона плоскости винтов при горизонтальном полете; 10 - препятствие, 11 - направление горизонтального движения, 12 - центр тяжести, 13 - величина перемещения центра тяжести при переходе к горизонтальному полету, 14 - плоскость горизонта, 15 - выборки материала пластины, 16 - опорные рычаги на нижней пластине для установки электродвигателя, 17 - плоскость внешней поверхности нижней пластины.
Мультикоптер содержит электродвигатели с несущими винтами, которые установлены между двумя: верхней и нижней параллельными пластинами из листового материала, между которыми закреплен, выполненный единой деталью из вспененного полимерного материала в форме колец вокруг несущих винтов, своеобразный бампер, обеспечивающий гашение вибраций от одной из пластин к другой и смягчение удара при столкновении.
Пластины выполнены в виде колец вокруг несущих винтов и жестко соединены между собой посредством алюминиевых стоек или шпилек, образуя жесткую раму корпуса мультикоптера. При этом верхняя и нижняя пластины выполнены едиными деталями, на одной из которых, в данном случае на нижней, предусмотрены опорные рычаги для установки электродвигателей. Для облегчения конструкции в пластинах и в бампере сделаны выборки, которые могут быть выполнены декоративной формы.
В конкретном случае исполнения кольцеобразные пластины могут быть выполнены из листового алюминия марки Д16Т, в тоже время для целей снижения веса или, например, снижения стоимости кольцевые пластины могут быть выполнены из других материалов, таких как карбон, пластик, фанера и др. Верхняя и нижняя пластины могут быть выполнены также из разных материалов.
Кольца из полимерного материала могут быть выполнены из таких материалов, как пенополиуритан с плотностью от 40 до 220 кг/м3, EVA той же плотности и пр.
Кольцеобразные пластины формируют верхнюю и нижнюю плоскости мультикоптера в границах которых установлены электродвигатели с несущими винтами.
Кольца из полимерного материала могут выступать за периметр кольцеобразных пластин, образуя внешнюю часть бампера.
На опорных рычагах, в данном случае нижней пластины установлены двигатели с несущими винтами, а на другой, в данном случае - верхней пластине в центральной ее части закреплены контроллер. Батарея питания размещена между пластинами в центральной части корпуса устройства.
В другом варианте исполнения опорные рычаги для крепления двигателей могут быть выполнены на верхней пластине, а контроллер в этом случае закреплен на нижней пластине.
Место установки контроллера закрыто крышкой аэродинамической формы из пластика или иного радиопрозрачного материала.
Соединенные между собой через слой вспененного полимерного материала пластины обеспечивают высокую прочность конструкции, в том числе при воздействии на ее изгиб, что особенно актуально при вертикальном падении.
Мультикоптер снабжен видеокамерой, размещенной на боковой стороне, между верхней и нижней пластинами.
При необходимости мультикоптер может быть снабжен навесным внешним оборудованием или грузовым отсеком. В этом случае на нижней пластине могу быть установлены опорные стойки, которые могут быть закреплены на нижней пластине по ее периметру, что обеспечит максимальную устойчивость при посадке.
Мультикоптер работает следующим образом.
Мультикоптер может быть выполнен содержащим три, четыре (в случае квадрокоптера), шесть или более электродвигателей с несущими винтами, управление вращением которых осуществляется с помощью контроллера, запитываемого от батареи источника питания.
Горизонтальное перемещение мультикоптера обеспечивается за счет разницы в частоте вращения соответствующих несущих винтов, при котором появляется наклон плоскости мультикоптера в сторону горизонтального движения. Конструкция мультикоптера характеризуется размещением наиболее массивных частей, таких как батарея и электродвигатели, внутри рамы корпуса, т.е. между плоскостями верхней и нижней пластин, в силу чего центр тяжести устройства также должен находиться в точке, расположенной между пластинами. В такой конструкции переход на горизонтальный полет связан с совершением минимальной работы на перемещение центра тяжести и, соответственно, требует минимальных энерго затрат, что обеспечивает минимизацию потребление энергии при маневрировании.
Конструкция мультикоптера, ограниченная сверху и снизу плоскостями внешней поверхности кольцевых пластин обеспечивает высокую степень мобильности, позволяющей устройству «проскальзывать» между такими препятствиями как ветки деревьев или параллельно висящие провода без ущерба устройству и без угрозы зацепиться с последующим падением. При касательном столкновении мультикоптеров, благодаря их форме, также низки риски поломки или падения. Таким образом, конструкция мультикоптера обеспечивает высокую его мобильность в условиях, осложненных наличием препятствий.
В случае лобового столкновения с препятствием внешняя часть бампера эластично деформируется в пределах, ограниченных краями кольцеобразных пластин. При этом внутренняя часть бампера остается на прежнем месте удерживаемая стойками, соединяющими пластины, что предотвращает выход несущих винтов из строя из-за соприкосновения вращающихся винтов с бампером. Таким образом в большом диапазоне скоростей, благодаря наличию алюминиевых стоек, соединяющих кольцевые пластины, кольцо из полимерного материала при столкновении с препятствием сминается лишь с внешнего края, обеспечивая исключение повреждения несущего винта в большинстве случаев столкновений.
Конструкция мультикоптера исключает возможность нанесения травмы вращающимся винтом при столкновении с человеком, так как несущий винт постоянно находится внутри жестко связанных между собой посредством металлических стоек верхней и нижней пластин. В случае очень сильного удара, повлекшего деформацию пластин в направлении винтов, несущий винт своей режущей кромкой может разрушить материал полимерного кольца, но не сможет все-таки выйти за периметр мультикоптера благодаря наличию алюминиевых стоек, которые гарантированно остановят винт, предотвратив возможность нанесения травмы.
Благодаря тому, что кольца из полимерного материала, а также верхняя и нижняя пластины выполнены едиными деталями, то есть монолитными, пространственная конструкция мультикоптера обладает высокой степенью жесткости и устойчивостью к внешним механическим воздействиям.
При вертикальном падении мультикоптер соприкасается с грунтом или иной поверхностью всей своей плоскостью, что обеспечивает распределение силы удара по элементам всей конструкции, смягчая его для отдельных узлов устройства и уменьшая чувствительность к падениям. При этом, благодаря жесткому взаимному соединению пластин, устойчивому к изгибу, и отсутствию выступающих частей электродвигателя и несущего винта за плоскости верхней и нижней пластин исключается соприкосновение несущих винтов с окружающими предметами, что обеспечивает возможность длительного срока службы, благодаря сохранности в рабочем состоянии винтов и электродвигателей.
Низкая чувствительность к падениям, в том числе и от столкновения с внешними препятствиями, такими как ветки деревьев или кустарник обеспечивают высокую живучесть мультикоптера.
Монолитное исполнение конструкции колец из полимерного материала обеспечивает дополнительную жесткость конструкции.
Одновременное выполнение пластин монолитными, что обеспечивает снижение частоты резонансных колебаний деталей, наличие между двумя монолитными пластинами слоя из полимерного материала, снижающее вибрационную связь между пластинами, а также разнесение мест установки двигателей и датчиков контроллера по разным пластинам обеспечивает гашение вибраций от расположенных на опорных рычагах одной из пластин - нижней двигателей, к другой - верхней пластине, на которой закреплены акселерометры контроллера. Такая комбинация конструктивных элементов обеспечивает результат, не являющийся следствием каждого конструктивного элемента, взятого в отдельности, а именно: исключение негативного влияния вибрации на работу датчиков контроллера. Снижение вибрации на датчиках, в том числе акселерометрах обеспечивает улучшение управляемости полета и повышение надежности управления мультикоптером.
Комбинация конструктивных свойств, в числе которых выполнение конструкции своеобразного трехслойного сечения с одновременным условием расположения несущего винта в границах верхней и нижней пластин, а также плоское сечение самих внешних пластин обеспечивают достижение высокой устойчивости мультикоптера к механическим воздействиям, а именно к столкновениям и в особенности к падениям, которая не может быть достигнута каждым из конструктивных свойств в отдельности. Высокая устойчивость к механическим воздействиям обеспечивает высокую эксплуатационную надежность устройства.
Еще один комбинированный эффект обусловлен одновременным выполнением средней части сечения из легкого полимерного материала, и выполнением защиты в виде индивидуальных колец, что позволяет достигнуть минимальной массы мультикоптера, и также снизить его материалоемкость.
Кроме того, пластины могут быть изготовлены путем вырубки из листового материала и образуют индивидуальные защитные кольца вокруг вращающихся несущих винтов, так, что материал пластин не выступает за линии соединяющие соседние кольца. Таким образом, габариты мультикоптера имеют минимальную возможную ширину при заданных размерах размаха несущих винтов и их взаимного удаления, а масса мультикоптера также стремится к минимальной.
Мультикоптер может быть изготовлен с использованием стандартных материалов: пластика, листового пластичного материала и стандартных радиоэлектронных компонентов.
Таким образом, мультикоптер обеспечивает исключение возможности соприкосновения внешней режущей кромки несущих винтов с препятствием при столкновении в горизонтальном полете, что делает его более безопасным и расширяет его область применения.
Мультикоптер обеспечивает исключение или уменьшение вероятности поломки несущих винтов по причине их соприкосновения с внутренней частью бампера при его деформировании от столкновения, а также обеспечивает снижение вероятности разрушения конструкции при вертикальном падении что повышает надежность устройства в целом.
Мультикоптер обеспечивает минимизацию энергозатрат при маневрировании, а также обеспечивает надежную управляемость за счет снижения влияния вибрации от двигателей.
Мультикоптер обеспечивает также повышение мобильности в условиях, осложненных наличием препятствий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДРОНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709562C1 |
| УЧЕБНЫЙ КВАДРОКОПТЕР | 2024 |
|
RU2835694C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| Способ применения БПЛА и система осуществления способа | 2023 |
|
RU2828920C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2814297C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ВОЗДУШНЫМИ ВИНТАМИ НА ПОВОРОТНЫХ ЗАКРЫЛКАХ КРЫЛА | 2021 |
|
RU2757693C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых беспилотных летательных аппаратов. Мультикоптер содержит электродвигатели с несущими винтами и кольца из полимерного материала, установленные вокруг несущих винтов. Указанные кольца из полимерного материала закреплены между двумя - верхней и нижней параллельными и соединенными между собой посредством стоек пластинами, образующими индивидуальные защитные кольца вокруг вращающихся несущих винтов. Электродвигатели установлены на опорных рычагах одной из пластин, а несущий винт не выступает за плоскости внешних поверхностей пластин. Исключается возможность соприкосновения внешней режущей кромкой несущих винтов с препятствием при столкновении в горизонтальном полете, уменьшается вероятность поломки несущих винтов. 4 з.п. ф-лы, 4 ил.
1. Мультикоптер, содержащий электродвигатели с несущими винтами и кольца из полимерного материала, установленные вокруг несущих винтов, отличающийся тем, что указанные кольца из полимерного материала закреплены между двумя - верхней и нижней параллельными и соединенными между собой посредством стоек пластинами, образующими индивидуальные защитные кольца вокруг вращающихся несущих винтов, при этом электродвигатели установлены на опорных рычагах одной из пластин, а несущий винт не выступает за плоскости внешних поверхностей пластин.
2. Мультикоптер по п. 1, отличающийся тем, что пластины выполнены в виде колец, количество которых соответствует количеству несущих винтов.
3. Мультикоптер по п. 1, отличающийся тем, что верхняя и нижняя пластины выполнены монолитными в виде двух единых деталей.
4. Мультикоптер по п. 1, отличающийся тем, что стойки выполнены в виде металлических стержней.
5. Мультикоптер по п. 1, отличающийся тем, что кольца из полимерного материала выполнены в виде единой детали, форма внешнего периметра которой соответствует форме внешнего периметра пластин.
| Беспилотный летательный аппарат | 2017 |
|
RU2666493C1 |
| US 20170113800 A1, 27.04.2017 | |||
| US 20160229530 A1, 11.08.2016 | |||
| WO 2017136776 A1, 10.08.2017 | |||
| EP 3116780 B1, 28.02.2018. | |||

