Описываемое предлагаемое изобретение относится к области гидроакустики и может быть использовано в гидролокационных системах при обнаружении цели и определении ее координат и параметров движения.
Эффективность гидролокаторов надводных кораблей во многом зависит от выбора параметров зондирующих сигналов и способов их обработки в приемном тракте.
Выбор параметров гидролокационных зондирующих сигналов производится в зависимости от целей их использования (получение максимальной дальности обнаружения целей на фоне шумовой и реверберационной помехи, обеспечение максимальной точности).
В современных гидролокаторах для обеспечения больших энергетических дальностей обнаружения целей используются зондирующие сигналы большой длительности (до нескольких секунд), а также используются различные типы сигналов и оптимальные методы их обработки, обеспечивающие высокую помехоустойчивость относительно реверберационной помехи.
Использование в качестве зондирующих сигналов сложных широкополосных зондирующих сигналов и оптимальной частотно-временной их обработки в приемном тракте дает возможность одновременно обеспечить:
- большую энергию зондирующих сигналов за счет излучения сигналов большой длительности и высокую помехоустойчивость относительно реверберационной помехи при высокой их разрешающей способности по дальности;
- высокую помехоустойчивость при обнаружении сигналов на фоне реверберационных помех даже при малых скоростях цели;
- расширение классификационных возможностей.
В режимах кругового или секторного обзора пространства целесообразным является использование широкополосных сложных импульсных сигналов инвариантных к доплеровскому изменению масштаба времени, что позволяет для обработки сигналов во всем доплеровском диапазоне использовать один согласованный фильтр, что очень важно при обработке сигналов большой сложности (длинных широкополосных сигналов) и при большом числе пространственных каналов [5].
Наиболее близкой к предлагаемому изобретению является обработка сигналов в оптимальном обнаружителе точно известного сигнала (Евтютов А.П., Митько В.Б. «Инженерные расчеты в гидроакустике». - 2-е изд., перераб. и доп.- Л., Судостроение. 1988 г., стр. 105) (ПРОТОТИП). Такой приемник вычисляет взаимную корреляционную функцию между принимаемым процессом и копией сигнала. После дальнейшей обработки (фильтрации и усиления) производится сравнение полученного сигнала с пороговым значением. При превышении порогового значения принимается решение об обнаружении цели.
Рассмотренный способ является оптимальным с точки зрения отношения сигнал/помеха для детерминированного сигнала. Однако в нем не учитывается влияние канала, в котором распространяется сигнал. При распространении сигналов на большие расстояния, а также при сильно развитой многолучевости, эти сигналы разрушаются и становятся не коррелированны с опорным. Для обработки сигналов необходимо определить искажающее влияние канала распространения и сформировать новый опорный сигнал, адаптированный к условиям канала распространения.
Если учесть влияние канала распространения при обработке эхосигнала, то в этом случае увеличивается коэффициент корреляции между опорным и зондирующим сигналами. Это может быть достигнуто за счет адаптации опорного сигнала к условиям распространения.
Целью изобретения является разработка способа обработки сигналов с гиперболической частотной модуляцией, техническая реализация которого позволит увеличить отношение сигнал/помеха на входе приемного тракта гидролокационной системы и повысить эффективность ее функционирования.
Указанная цель достигается путем создания алгоритма обработки сигналов с гиперболической частотной модуляцией, учитывающий влияние канала распространения.
Представляя канал в виде линейного фильтра и принимая гипотезу однородности и стационарности условий, канал описывают передаточной функцией, определяемой вектором пространственно-временных координат  t и пространственно-временных частот
t и пространственно-временных частот  ƒ
ƒ

Смысл функции Н (1) заключается в описании вида канала в виде фильтра в заданный момент времени t в точке приема  Масштабы временных и пространственных изменений меняются в широких пределах. При этом крупномасштабные изменения принято описывать детерминированными соотношениями, а мелкомасштабные (микро) неоднородности - стохастическими описаниями. Процесс выбора масштаба зависит от волновых и временных размеров неоднородностей и является в значительной мере субъективным. Одним из возможных направлений отображения такой двойственности является представление передаточной функции в виде произведения двух функций
Масштабы временных и пространственных изменений меняются в широких пределах. При этом крупномасштабные изменения принято описывать детерминированными соотношениями, а мелкомасштабные (микро) неоднородности - стохастическими описаниями. Процесс выбора масштаба зависит от волновых и временных размеров неоднородностей и является в значительной мере субъективным. Одним из возможных направлений отображения такой двойственности является представление передаточной функции в виде произведения двух функций

где  детерминированная функции, описывающая пространственное, частотно-временное изменение амплитуды и фазы функции, и случайной (стохастическая) функция
детерминированная функции, описывающая пространственное, частотно-временное изменение амплитуды и фазы функции, и случайной (стохастическая) функция  тех же переменных.
тех же переменных.
Изложенные выше факторы усложняют математическую модель и могут кардинально ее изменить по сравнению с моделью, полученной на основе принятия гипотезы изотропной и стационарности среды.
Однако, влияние канала на свойства передачи и обработки сигнала можно в достаточно общей форме представить в виде функции рассеяния и фактора когерентности. Как правило, предполагается, что потери энергии при распространении нормированы. Тем не менее, большинство стохастических моделей, используемых при моделировании, являются сильно упрощенными, и адекватность их реальной среде весьма спорна. На самом деле стохастическая и детерминированная составляющая функций рассеяния зависят от:
- мелкомасштабных неоднородностей;
- взаимного расположения источника сигнала и цели, определяемого детерминированными свойствами среды.
Случайная функция Н определяется взаимным расположением источника и цели s, r частоты ƒ и времени t. Рассматривается математическое ожидание функции Н (фактор когерентности)

при γ=1 процесс полностью когерентен, при γ=0 - не когерентен.
Функция Н представляется в виде суммы когерентной детерминированной составляющей H0 и некогерентной случайной составляющей 
Полное описание функции Н можно представить в виде функции ковариации.

Функция (4) также является обобщенной функцией когерентности, которая представляет собой математическое описание канала распространения.
Используя сигнал с гиперболической частотной модуляцией и математический аппарат, изложенный выше, был разработан способ циклической корреляционной обработки с учетом влияния канала распространения [1, 3, 4].
Способ циклической корреляционной обработки с учетом канала распространения представлен на фигуре 1.
Сигнал с гиперболической частотной модуляцией описывается выражением:
где: Wn - количество волн в сигнале;
Fw - верхняя частота сигнала;
Fn - нижняя частота.
Поскольку, сигналы в реальных условиях являются не бесконечными, а финитными во времени и задаются от времени начала tn и до времени окончания сигнала tk, задаваемых правилом:
где tn - начало импульса;
tk - окончание импульса;
Fm - частота Меллина, определяемая выражением:
Исходя из вышесказанного, сигнал (5) с учетом ограничения по времени начала и окончания записывается в следующем виде:

где supp(t) - функция Хэвсайда, определяемая выражением:

На основании выражения (6), получаем графическое представление сигнала с гиперболической частотной модуляцией, представленный на фигуре 2 [2].
Проходя через канал распространения, излученный сигнал подвергается преобразованиям описываемым киниматикой цели α, задержкой сигнала τ, шумовой помехой n(t) в виде белого шума (фигура 3) и правилом:

Шумовая помеха n(t) представлена двумя реализациями (фигура 4).
Для формирования опорного сигнала с учетом влияния канала распространения применяется преобразование Гильберта к отраженному сигналу. Это обусловлено тем, что отраженный сигнал представляет собой только действительную часть, а эталонный сигнал представлен в комплексной форме. Новый опорный сигнал будет представлять собой смесь зондирующего сигнала с передаточной функцией канала распространения, т.е. учитывать его влияние. Вид опорного сигнала без учета влияния канала распространения и с учетом влияния канала распространения представлен на фигуре 5.
Вычисление взаимно-корреляционной функции R отраженного сигнала с опорным сигналом без учета влияния канала записывается в виде:

Далее вычисляется квадрат модуля взаимно корреляционной функции:
После определения задержки происходит ее компенсация в отраженном от цели сигнале, в результате которого получаем процесс, подверженный влиянием канала распространения и целью:

При последующем приеме происходит вычисление взаимно-корреляционной функции между новым опорным сигналом и принятым сигналом в виде произведения их спектров и обратного быстрого преобразования Фурье:

где G{.} - преобразование Гильберта.
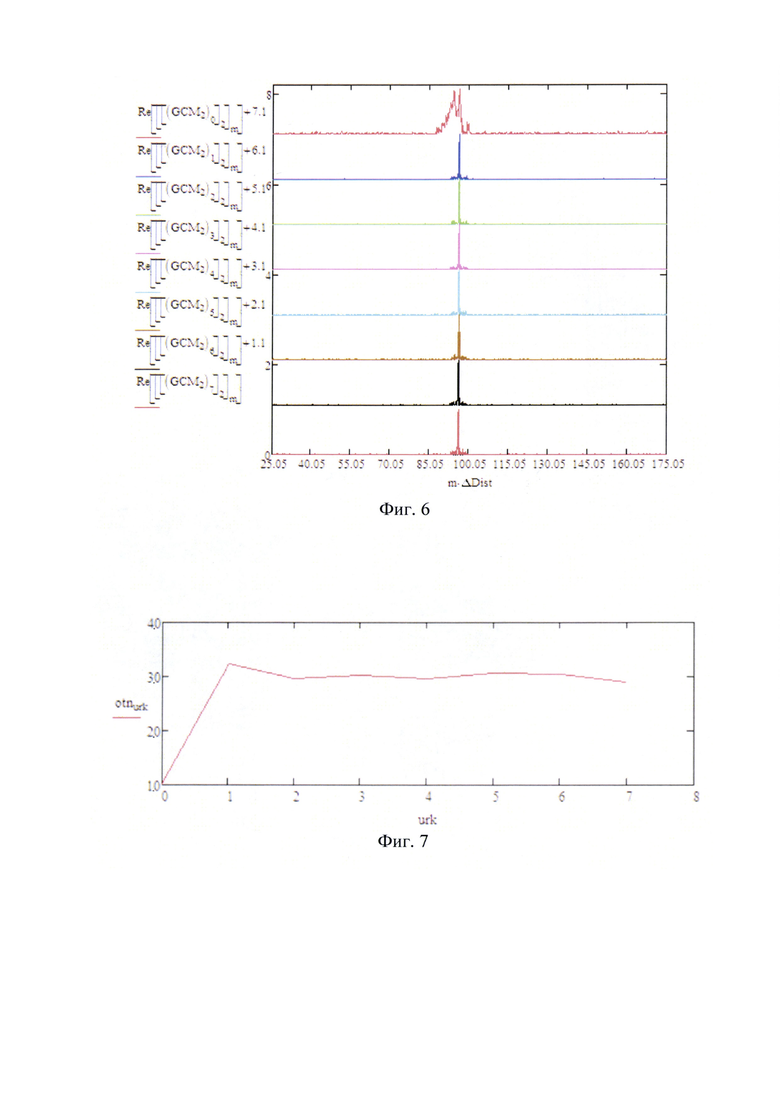
В результате произведенных восьми вычислений получены взаимно-корреляционные функции R отраженного сигнала с опорным сигналом без учета влияния канала распространения (красный цвет) и с опорным сигналом с учетом влияния канала. Вид взаимно-корреляционных функций представлен на фигуре 6.
Первое испытание соответствует взаимно-корреляционной функции эталонного сигнала с отраженным сигналом без учета влияния канала распространения. Со 2 по 8 испытания взаимно-корреляционная функция находилась с использованием опорного сигнала, учитывающего влияние канала распространения. В каждом испытании шумы формировались независимо друг от друга.
Для полученных результатов вычислялось отношение сигнал/помеха и производилось сравнение их между собой.
Результаты записывались последовательно. Нулевому отсчету соответствует результат, полученный традиционным способом без учета влияния канала распространения, остальные - с учетом влияния канала распространения сигнала.
В результате моделирования получен новый опорный сигнал с гиперболической частотной модуляцией, учитывающий влияние канала распространения.
Предлагаемый способ обработки входного сигнала с гиперболической частотной модуляцией, учитывающий влияние канала распространения, позволяет увеличить отношение сигнал/помеха, примерно, в 3 раза (фигура 7).
Данный вид обработки сигналов может быть использован при модернизации существующих активных гидроакустических средств, использующих сложные зондирующие сигналы и при строительстве новых гидроакустических комплексов подводных лодок и надводных кораблей. Особенно данный вид обработки может быть относительно просто внедрен в гидроакустические комплексы при реализации мультистатической и бистатической гидролокации.
Источники информации, использованные при выявлении изобретения и составлении его описания:
1. Лушанкин В.И. «Теория основ военной гидроакустики». - Санкт-Петербург, ВСОК ВМФ, 2010.
2. Макаров Е.С. «Инженерные расчеты в Mathcad 15». - Москва, Санкт-Петербург, ПИТЕР, 2011.
3. Сапрыкин В.А. Волошин А.К. Рокотов С.П. «Цифровая обработка гидроакустических сигналов». - Санкт-Петербург, ВМИРЭ им. А.С.Попова, 1990.
4. Сапрыкин В.А. Корреляционный анализ групповых сигналов // XV Межвузовская НТК «Военная радиоэлектроника: Опыт использования и проблемы, подготовка специалистов» / ВМИРЭ. - Петродворец, 2004. - с. 270-271.
5. Сапрыкин В.А. Рокотов С.П. «Теория гидролокации и цифровая обработка сигналов». - Санкт-Петербург, ВМИРЭ им. А.С Попова, 1988.
6. Евтютов А.П., Митько В.Б. «Инженерные расчеты в гидроакустике». - 2-е изд., перераб. и доп. - Л., Судостроение. 1988 г., стр. 105 (ПРОТОТИП).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ВЫЧИСЛЕНИЯ ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА С УЧЕТОМ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2009 |
|
RU2487367C2 |
| Способ цифровой обработки сложных широкополосных локационных сигналов | 2023 |
|
RU2832199C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ ДЛЯ БЫСТРОДВИЖУЩИХСЯ ОБЪЕКТОВ | 2017 |
|
RU2658649C1 |
| Гидролокационный способ классификации объектов | 2022 |
|
RU2791152C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| Способ гидролокационного обнаружения высокоскоростного малоразмерного объекта | 2020 |
|
RU2740158C1 |

Способ обработки сигналов с гиперболической частотной модуляцией относится к области гидроакустики и может быть использован в гидролокационных системах при обнаружении цели и определении ее координат и параметров движения. При разработанном способе обработки сигналов с гиперболической частотной модуляцией формируется опорный сигнал с учетом влияния канала распространения, для чего вычисляется взаимно корреляционная функция отраженного сигнала с опорным сигналом без учета влияния канала и ее квадрат модуля, после определения задержки происходит ее компенсация в отраженном от цели сигнале. При последующем приеме происходит вычисление взаимно корреляционной функции между новым опорным сигналом и принятым сигналом в виде произведения их спектров и обратного быстрого преобразования Фурье. В результате применения разработанного способа обработки сигналов получается новый опорный сигнал с гиперболической частотной модуляцией, учитывающий влияние канала распространения, использование которого увеличивает отношение сигнал/помеха на входе приемного тракта гидролокационной системы примерно в 3 раза. 7 ил.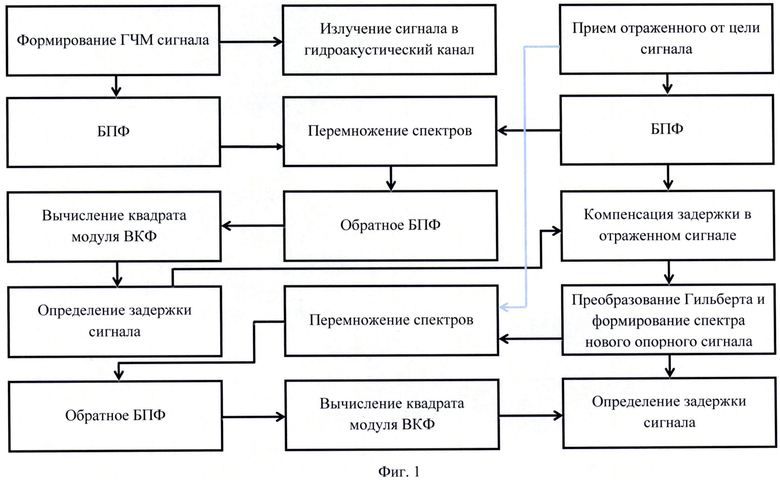
Способ обработки сигнала с гиперболической частотной модуляцией, основанный на вычислении взаимно-корреляционной функции опорного сигнала, сформированного в процессе излучения и записанного в транспонирующее устройство, с отраженным сигналом от цели, отличающийся тем, что при обработке сигнала с гиперболической частотной модуляцией определяется искажающее влияние канала распространения на отраженный сигнал путем формирования опорного сигнала с учетом влияния канала распространения, для чего вычисляется взаимно-корреляционная функция отраженного сигнала с опорным без учета влияния канала распространения, вычисляется квадрат модуля взаимно-корреляционной функции, определяются временные задержки в отраженном сигнале, компенсируются полученные задержки в отраженном сигнале, в результате получается отраженный сигнал с учетом искажающего влияния канала распространения, использующийся в качестве опорного сигнала с учетом искажающего влияния канала распространения, а при последующем излучении осуществляется обработка с вычислением взаимно-корреляционной функции между отраженным сигналом и новым опорным сигналом, учитывающим искажающее влияние канала распространения, в виде произведения их спектров и обратного быстрого преобразования Фурье, при этом полученный новый опорный сигнал с гиперболической частотной модуляцией, учитывающий влияние канала распространения, при последующем его использовании увеличивает отношение сигнал/помеха на входе приемного тракта гидролокационной системы.
| С.Н | |||
| ПАВЛИКОВ и др | |||
| МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МУЛЬТИПЛИКАТИВНЫХ СИГНАЛОВ | |||
| H&ES RESEARCH - НАУКОЕМКИЕ ТЕХНОЛОГИИ В КОСМИЧЕСКИХ ИССЛЕДОВАНИЯХ ЗЕМЛИ | |||
| ООО "ИЗДАТЕЛЬСКИЙ ДОМ МЕДИА ПАБЛИШЕР", 2013, СТР | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| Приспособление для удержания штанги высоковольтного выключателя | 1958 |
|
SU120239A1 |
| СПОСОБ ПОВЫШЕНИЯ УРОВНЯ (ОТНОШЕНИЯ) СИГНАЛ-ШУМ ПРИ ПРИМЕНЕНИИ "ПРИНЦИПА ЗАТУХАНИЯ ПОМЕХИ" | 2010 |
|
RU2491717C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |

