Изобретение относится к области кораблестроения и морской техники, морских автоматизированных платформ, а также к области авиационной техники, в частности к стабилизированным взлетно/посадочным платформам. В то же время, изобретение может иметь и иные области применения, например, может использоваться, как стабилизированная платформа для вооружений, исследовательской аппаратуры, или для стабилизации трапов, в частности трапов к буровым и иным платформам, а также для состыковки различных систем, в том числе энергообеспечения. Таким образом, несмотря на то, что основная область применения изобретения - это стабилизированные взлетно/посадочные платформы для вертолетов (или самолетов вертикального взлета и посадки (ВВП)), возможны и иные применения, что будет ясно и понятно из дальнейшего описания.
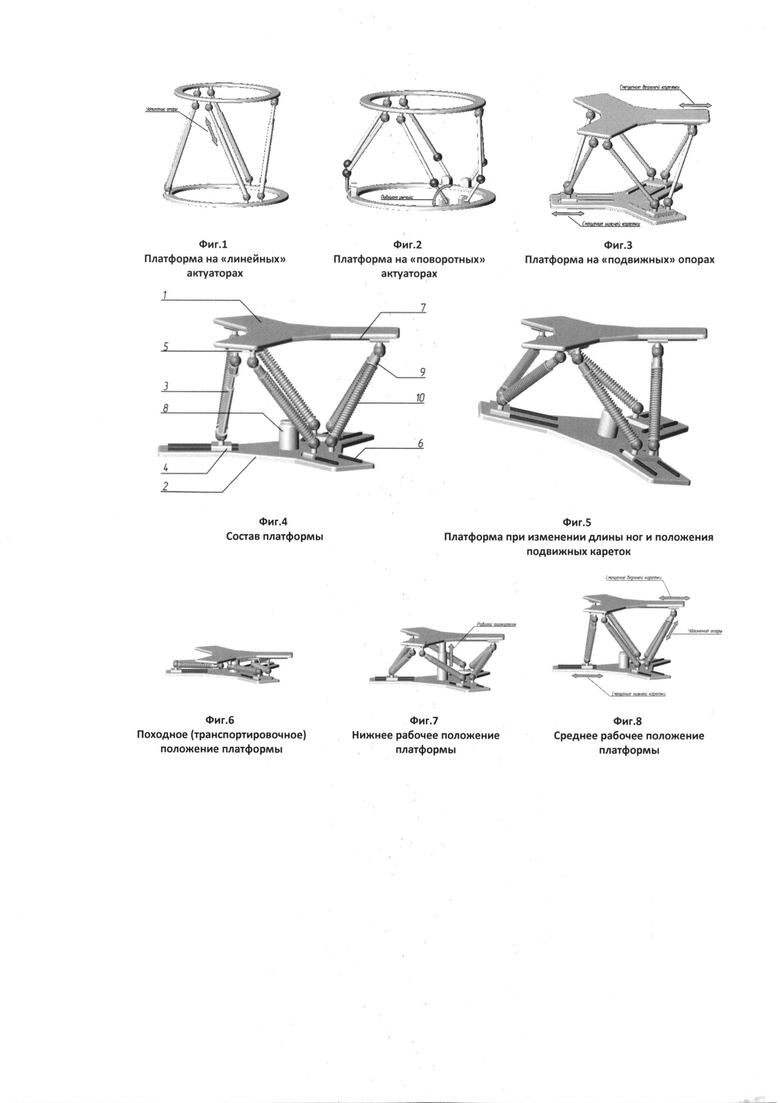
Из уровня техники известны различные схемы стабилизированных платформ, которые могут применяться для вышеописанных целей. Распространенной схемой является схема гексапод соответственно на «линейных» актуаторах (ногах) изменяемой длины (Фиг. 1), «поворотных» актуаторах (Фиг. 2.), на «подвижных» опорах (каретках) (Фиг. 3.).
Одним из примеров платформы на базе гексапода можно назвать решение, раскрытое в WO 2007120039 A1 ("VESSEL, MOTION PLATFORM, METHOD FOR COMPENSATING MOTIONS OF A VESSEL AND USE OF A STEWART PLATFORM"). Данное решение представляет собой стабилизированный трап судна для подсоединения к нефтяной платформе и компенсации качки. Несмотря на очевидные преимущества, такая схема не может быть компактно сложена и занимает очень много места на палубе корабля, а также обладает недостаточными значениями ходов по степеням свободы для компенсации качки высокой бальности - эти аргументы менее критичны для создания трапа, но более критичны при создании взлетно/посадочных платформ. Данное решение имеет примерно то же назначение, что и заявленное устройство и принято за прототип.
Схожие решения известны и из других источников - например, ЕР 2505486 A1 ("Gangway"), WO 2014053528 A1 ("VESSEL WITH SYSTEM FOR TRANSFERRING PERSONS OR GOODS") и других.
Подобные схемы находят применение и в других областях техники, например, создание симулятора полета - US 5975907 A ("Motion simulator with
movable base plate"), подвижный «кинотеатр» - US 5722897 A ("Sensory simulator and editor and a method of using the same"). Множество иных применений гексапода описано в WO 2012000840 A1 ("STEWART PLATFORM").
Существуют и более сложные варианты осуществления, например, из WO 2014053528 A1 ("VESSEL WITH SYSTEM FOR TRANSFERRING PERSONS OR GOODS") известна система, которая представляет собой два установленных друг на друга гексапода. В этом случае, дополнительные степени свободы приводят к еще большим увеличениям габаритов, а также существенному росту сложности конструкции, и, как следствие - снижению ее надежности, а также увеличению общей массы, и дополнительно, повышению высоты центра тяжести (что может негативно сказаться на мореходных качествах судна).
Известны и еще более сложные системы - например, в CN 101016971 А ("Master-slave mode two-in-parallel twelve degree of freedom generalized force adjustment loading mechanism") используются целых три гексапода установленных друг на друга, однако таким решением присущи те же недостатки.
Одним из примеров решения платформы с подвижными основаниями -US 8578811 В2 ("Hexapod actuator device"). Подобные платформы используются также, как и гексаподы, для управления пространственным положением подвижной плиты устройства.
Подобные решения описаны также в ряде научных работ - Kinematically Redundant Octahedral Motion Platform for Virtual Reality Simulations (arXiv preprint arXiv: 1704.04677. - 2017), а также Guo K. et al. A monolithic adjusting mechanism for optical element based on modified 6PSS parallel mechanism (Sensors and Actuators A: Physical. - 2016. - T. 251. - C. 1-9.), где описаны варианты устройств, у которых подвижные ноги платформы снизу закреплены на каретках, которые движутся по нижней плите. В другой работе - Lee, Se-Han, et al. "Workspace and force-moment transmission of a variable arm type parallel manipulator (Robotics and Automation, 2002. Proceedings. ICRAʹ02. IEEE International Conference on. - IEEE, 2002. - T. 4. - C. 3666-3671.) описана платформа, где подвижные ноги сверху закреплены на каретках, движущихся по направляющим.
При этом, ни в одной из этих работ, не указано на возможность использования подобных схем для создания взлетно/посадочных платформ,
организующих большее число степеней свободы, чем имеется у гексапода или платформ с подвижными опорами, для обеспечения существенно больших размеров рабочей зоны (ходов) движения платформы, существенного большего расширения ее кинематических и динамических свойств, повышения надежности работы всей системы за счет возможности дублирования одного и того же движения разными приводами, а также возможности «складывания» платформы, в несколько раз уменьшая ее габаритные размеры в сложенном состоянии в сравнении с рабочим состоянием, обеспечивая тем самым также снижение положения центра тяжести всей конструкции в сложенном состоянии.
Представляется рациональным выполнение подвижными и верхних и нижних креплений опор, подвижных ног изменяемой длины гексапода - именно это решение даст возможность сложить платформу в компактное состояние.
Объединение идей, описанных в данных работах, также видится неочевидным, а сами идеи относятся к области робототехники.
Таким образом, на сегодняшний день авторам не известно достаточно компактной системы, на основании которой возможно было бы создание стабилизированной платформы с требуемыми свойствами.
Задачей настоящего изобретения является создание компактной стабилизированной платформы, которая бы имела возможность оперативного складывания и раскладывания, была бы достаточно компактной в походном («сложенном») состоянии, для установки даже на небольших судах, обеспечивала бы требуемую кинематику движения, обеспечивая вертикальный взлет и посадку летательного аппарата при сильной качке судна и существенной ветровой нагрузке, испытываемой летательным аппаратом, и при этом, конструкция платформы обеспечивала бы снижение возможного удара летательного аппарата о платформу при жесткой/аварийной посадке.
Задача решается за счет того, что стабилизированная платформа, представленная на Фиг. 4, выполненная по схеме, объединяющей известные схемы гексапода (Фиг. 1) и платформы на «подвижных» опорах (Фиг. 3), и содержащая верхнюю плиту (поз. 1.), нижнюю плиту (поз. 2.), а также группу размещенных между ними подвижных ног изменяемой длины (поз. 3.), крепящихся к нижней и верхней плитам при помощи подвижных кареток (опор) (поз. 4. и поз. 5.), которые выполнены с возможностью движения по направляющим (поз. 6. и поз. 7.) к центру/от центра соответственно нижней и верхней плит. В результате контролируемого системой управления изменения длины ног и положения подвижных кареток, можно обеспечить требуемое (например, горизонтальное) положение верхней (взлетной/посадочной) плиты стабилизированной платформы, для взлета/посадки летательного аппарата, при перемещении и повороте нижней плиты вместе с палубой судна на которой установлена платформа (см. Фиг. 5.).
Платформа, также отличающаяся тем, что включает толкатель (поз. 8.) начального «страгивания», обеспечивающий подъем верхней плиты (поз. 1.) из походного положения (Фиг. 6.) в нижнее рабочее положение (Фиг. 7.). Назначением толкателя является создание необходимого усилия для подъема верхней плиты из ее крайнего нижнего (походного) положения. В этом положении, продольные оси подвижных ног изменяемой длины (поз. 3.) занимают положение, практически совпадающее с плоскостью нижней плиты (поз. 2.), и поэтому не могут обеспечить передачу усилия на верхнюю плиту (поз. 1.) для ее подъема (фактически по направлению перпендикуляра к плоскости нижней плиты). Далее, после выдвижения толкателя на полный ход (Фиг. 7.) и подъема верхней плиты на расчетную высоту, подвижные ноги изменяемой длины уже приобретут достаточный угол по отношению к нижней плите, что позволит им начать удлиняться, и вместе с движением нижних кареток к центру нижней плиты, а верхних кареток к наружному краю верхней плиты, поднять верхнюю плиту в среднее рабочее положение (Фиг. 8.).
Платформа, также отличающаяся тем, что ноги изменяемой длины, имеют встроенные упругодемпфирующие элементы (поз. 9.), обеспечивающие снижение ударных нагрузок/ускорений в момент возможного нерасчетного/аварийного касания шасси вертолета верхней плиты платформы.
Платформа, также отличающаяся тем, что привода, удлиняющихся ног и перемещающихся кареток, содержат предварительно поджатые упругие элементы уравновешивающие полную силу веса верхней плиты платформы (поз. 10.) с приводами и верхними подвижными каретками.
Примечание: на Фиг. 4. упругий элемент (поз. 10.) на одной подвижной ноге изменяемой длины (поз. 3.) - погашен для удобства показа самой ноги.
Платформа, также отличающаяся тем, что удлиняющиеся ноги, подвижные нижние и верхние каретки, а также толкатель, приводятся в движение при помощи гидравлических приводов.
Платформа, также отличающаяся тем, что все приводы являются независимыми.
Платформа, также отличающаяся тем, что является взлетной/посадочной платформой для вертолета, самолета ВВП, беспилотного летательного аппарата или зонда.
Сущность изобретения заключается в том, что платформа представляет собой платформу выполненную по модифицированной схеме гексапода и также, как и гексапод, содержит нижнюю плиту, установленные на ней шесть ног изменяемой длины, которые связаны с верхней плитой, при этом, в заявленном изобретении, ноги изменяемой длины связаны с верхней и нижней плитами при помощи нижних и верхних кареток, установленных на направленных к центру плит направляющих так, что положения мест фиксации ног к плитам относительно плит может изменяться, как у платформы с «подвижными» опорами. В каждой из шести ног встроены последовательно два дополнительных устройства: уравновешивающий элемент и упругодемпфирующий. Кроме того, для обеспечения необходимого усилия подъема, в крайнем нижнем («сложенном») положении платформы, дополнительно используется толкатель с ограниченным ходом.
Сложение степеней свободы, обеспечиваемых классическими гексаподом и платформой с «подвижными» опорами, не только обеспечивает дополнительные возможности по кинематике стабилизации, но и позволяет осуществлять горизонтальные перемещения всей платформы по плоскости палубы судна в пределах возможных перемещений кареток. Дополнительные степени свободы по сравнению с платформой на базе классического гексапода, расширяют диапазоны перемещений и скоростей перемещений, за счет чего также повышается динамичность реакции системы стабилизации по всем шести координатам пространственного движения верхней плиты платформы. Так, например, если система управления «обнаружит», что вертолет (или самолет с ВВП) не попадает на центр платформы - в этом случае, за счет движения верхних и нижних кареток по направляющим, платформа, может дополнительно сместиться в плоскости палубы судна сохраняя, при этом, требуемую высоту верхней плиты (взлетно/посадочной площадки).
Дополнительным существенным преимуществам такой схемы становится то, что при перемещении верхних и нижних кареток в крайние противоположные положения (верхние каретки к центру верхней плиты, а нижние к наружному краю нижней плиты) платформа складывается и ее максимальная высота оказывается равной суммарной толщине верхних и нижних плит и толщине (диаметру) самих ног (см. Фиг. 6.). Для классического гексапода это практически не представляется возможным, что существенно сужает область их использования, особенно на небольших судах, где свободное пространство и положение высоты центра тяжести платформы имеет критическую важность. Также, отсутствие возможности складывания классической платформы ограничивает возможность ее использования на военных кораблях, так как «не складываемая» высокая посадочная платформа увеличивает эффективную площадь рассеяния и повышает радиозаметность корабля. В тоже время решения, построенные на платформах только с подвижными опорами, без возможности изменения длин ног, не обладают достаточными рабочими зонами (ходами) и ограничивают взлет/посадку на качке высокой бальности.
Со ссылкой на Фиг. 1. заявленное изобретение представляет собой гексапод (другое название платформа Гью-Стюарта) (D. Stewart, A Platform with Six Degrees of Freedom, UK Institution of Mechanical Engineers Proceedings 1965-66, Vol 180, Pt 1, No 15.). Платформа включает верхнюю плиту и нижнюю плиту. Нижняя плита предпочтительно устанавливается на палубе судна.
В то же время возможны и иные места установки платформы, обусловленные другими вариантами ее применения. Несмотря на то, что описание в целом сосредоточено вокруг использования заявленной стабилизированной платформы в качестве взлетной/посадочной платформы для летательных аппаратов, таких как вертолеты, БЛА, самолеты с ВВП, различные зонды и т.д., возможны и иные применения заявленного изобретения. Так, одним из вариантов видится использование заявленной платформы как стабилизированной площадки для размещения артиллерийского, ракетного, радиолокационного, торпедного, лазерного и иного вооружения или военного оборудования на судне. В другом варианте, заявленное изобретение может найти применение на научных морских судах для размещения чувствительного к качке научно-исследовательского оборудования. При необходимости, а также за счет масштабируемости, заявленное изобретение может быть использовано для размещения практически любых элементов морских судов - навигационного оборудования, медицинского оборудования (например, в медицинских каютах), рабочих мест операторов, спальных мест и т.д. В иных вариантах возможно использование заявленного изобретения не только на самих судах, но и на морских платформах, например буровых, или плавучих доках, а также на элементах портовой инфраструктуры, таких как пирсы и причалы. Возможен вариант платформы устанавливаемый на плавучей буровой платформе. В другом варианте вся система используется для стыковки различных систем энергообеспечения, в частности между судном и неподвижной вышкой/пирсом, или даже другим судном. Так, например, можно при помощи заявленного изобретения решить задачу состыковки разъемов/шлангов и перекачки топлива/нефти/подачи электропитания в море, при качке с одного судна на другое. Применение платформы может быть также расширено для задач перемещения грузов между плавучими объектами, во время качки, непосредственно в море, без необходимости возврата в порт, на базу, или ожидания снижения волнения моря для выполнения операции стыковки разъемов. Возможны варианты применения платформы для пересадки и эвакуации людей, в том числе в экстремальных ситуациях. Возможны варианты размещения на платформе пожарного оборудования для обеспечения точности наведения брандспойтов на очаги пожара в условиях качки.
Принципиально нет никаких ограничений и для иных использований заявленного изобретения - оно может применяться и как наземная, воздушная и даже космическая стабилизированная/подвижная платформа. Иные возможные области применения ясны для специалиста на основании настоящего описания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Многофункциональное судно обеспечения морских буровых платформ и комплекс судовой системы грузообработки для применения на многофункциональном судне | 2020 |
|
RU2747109C1 |
| Способ обеспечения летчика визуальной информацией в условиях отсутствия видимости морской поверхности в ночное время | 2023 |
|
RU2822752C1 |
| КОСМОЛЕТОНОСЕЦ-ТРИМАРАН | 2000 |
|
RU2176968C1 |
| МОРСКАЯ ПОЛУПОГРУЖНАЯ ВЕРТОЛЕТНАЯ ПЛАТФОРМА | 2011 |
|
RU2475407C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
| Временная плавучая взлетно-посадочная полоса | 2023 |
|
RU2824218C1 |
| Сторожевой корабль | 2024 |
|
RU2834069C1 |
Изобретение относится к взлетно-посадочным платформам для летательных аппаратов. Стабилизированная платформа, выполненная по схеме гексапода, содержит верхнюю плиту (1), нижнюю плиту (2), а также группу размещенных между ними подвижных ног (3) изменяемой длины. При этом подвижные ноги (3) крепятся к нижней (2) и верхней плитам (1) при помощи подвижных кареток (4,5) с возможностью движения по направляющим (6,7) к центру соответственно нижней (2) и верхней (1) плит. Изобретение уменьшает габариты стабилизированной платформы, обеспечивает взлет и посадку летательного аппарата с судна в условиях сильной качки и при ветре, снижает удар летательного аппарата при жесткой посадке. 8 з.п. ф-лы, 8 ил.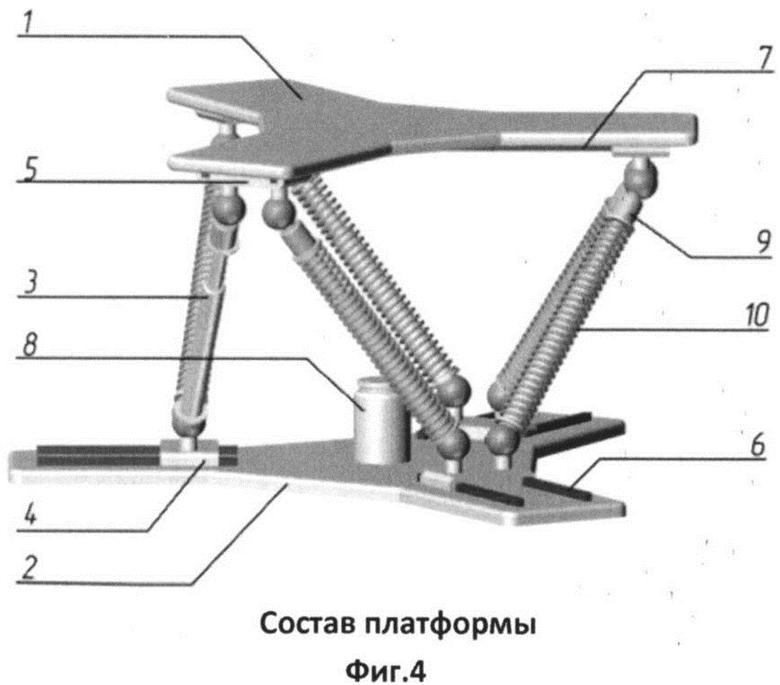
1. Стабилизированная платформа, выполненная по схеме гексапода, или другое название платформа Гью-Стюарта, содержащая верхнюю плиту, нижнюю плиту, а также группу размещенных между ними подвижных ног изменяемой длины, отличающаяся тем, что подвижные ноги крепятся к нижней и верхней плитам при помощи подвижных кареток с возможностью движения по направляющим к центру соответственно нижней и верхней плит.
2. Платформа по п. 1, отличающаяся тем, что включает управляемую подсистему начального страгивания, приводимую в движение приводами, включающую подвижный толкатель, выдвигающийся перпендикулярно верхней плите.
3. Платформа по п. 2, отличающаяся тем, что все ноги изменяемой длины, все подвижные нижние и верхние каретки, а также толкатель приводятся в движение при помощи приводов.
4. Платформа по п. 1, отличающаяся тем, что удлиняющиеся ноги имеют встроенные упругодемпфирующие элементы.
5. Платформа по п. 3, отличающаяся тем, что приводы ног изменяемой длины, перемещающихся кареток и гидроцилиндра страгивания толкателя содержат предварительно поджатые упругие элементы.
6. Платформа по п. 3, отличающаяся тем, что приводы всех ног изменяемой длины, а также всех подвижных верхних и нижних кареток являются независимыми.
7. Платформа по п. 3, отличающаяся тем, что движение приводов всех ног изменяемой длины, всех подвижных верхних и нижних кареток, а также привода толкателя программно синхронизировано.
8. Платформа по п. 2 или 6, отличающаяся тем, что приводы выполнены гидравлическими, или электромеханическими, или пневматическими, или электромагнитными.
9. Платформа по п. 1-6, отличающаяся тем, что является посадочной платформой для вертолета, самолета вертикального взлета и посадки, беспилотного летательного аппарата или зонда.
| WO 2007120039 A1, 25.10.2007 | |||
| US 20180028924 A1, 01.02.2018 | |||
| US 20110038691 A1, 17.02.2011 | |||
| ПАТЕНТНО- ..гА. П. Струковi * Is | 0 |
|
SU180260A1 |
| Способ принудительной посадки беспилотного летательного аппарата вертолетного типа на посадочную площадку корабля | 2015 |
|
RU2620848C2 |

