Изобретение относится к способам обследования тоннельных канализационных коллекторов с применением беспилотных летательных аппаратов (БПЛА).
Известен «Способ управления полетом беспилотного летательного аппарата», который состоит в том, что на БПЛА устанавливают приемник спутниковой системы навигации (ПССН) и радиопередатчик (РПРИ) информации о фактических параметрах полета БПЛА, а на наземной станции управления (НСУ) устанавливают радиоприемник (РПИ) этой информации. Последовательно в память вычислителя (В) НСУ вводят значения географических широты (ГШ), долготы (ГД) и высоты (Н) над уровнем моря точки начала каждого участка программной траектории (ПТ) БПЛА, вычисляют потребные 3 Fп, и углов ориентации (УО) вектора скорости БПЛА на каждом участке ПТ и запоминают их. В полете БПЛА с помощью ПССН определяют 3 ГШф, ГДф, Нф точки Л фактического местоположения БПЛА, а также проекций Vx, Vy, Vz вектора на оси соответствующей системы координат. С помощью РПРИ передают ГШф, ГДф, Нф, Vx, Vy, Vz на НСУ, где с помощью РПИ принимают их и подают в В, где вычисляют отклонения Lг и Lв фактической траектории БПЛА от ПТ, фактические значения Fф, иф УО вектора , разности dF углов Fп и Fф и разности dи углов ип и иф, формируют команды управления (КУ), зависящие от Lг, Lв, dF и dи, передают КУ на БПЛА, где принимают их и отклоняют рули БПЛА в соответствии с КУ. (см. патент RU №2 240 588, МПК G05D 1/10, G01C 21/12, G08G 5/00, G01S 13/91, 20.11.2004, Бюл. № 32).
Недостатком этого способа является узкая область применения, поскольку его невозможно реализовать без спутниковой системы навигации.
Наиболее близким аналогом к заявляемому способу служит Способ применения беспилотных летательных аппаратов и устройство управления, основанный на их адаптации режимов полета, отличающийся тем, что берется n БПЛА, где n>3, образующих в полете так называемую «этажерку», первый БПЛА является ведущим, второй и третий ведомыми, причем ведущий БПЛА занимает нижний высотный эшелон, второй БПЛА - промежуточный, третий - верхний, расстояние ведущего БПЛА от земной поверхности определяется безопасностью полета и безусловного выполнения поставленной задачи, например для контроля газо- и нефтепроводов, эта высота равна приблизительно 50 м, второй БПЛА выше ведущего еще на 50 м, третий БПЛА выше второго еще на 50 м, при этом второй БПЛА является ретранслятором данных по радиоканалу от первого БПЛА третьему БПЛА, который также по радиоканалу связан с наземной базовой станцией управления, передавая полученные данные наблюдения ведомого БПЛА и получая команды управления полетом или изменения программы полета, при высоте полета третьего БПЛА≈150 м и при принятой длине газонефтепровода между насосными станциями, равной 300 км, верхний третий БПЛА находится в пределах прямой видимости с наземной базовой станцией, что позволяет поддерживать с ним устойчивую связь (см. патент RU № 2457531, МПК G05D 1/0, 27.07.2012, Бюл. № 21).
Имеется вариант развития, когда при потере одного БПЛА в результате отказа двигателя, столкновения с птицей и пр. оставшиеся два БПЛА успешно выполнят поставленную задачу контроля, при этом любой из оставшихся БПЛА может стать ведомым, а другой займет верхний эшелон 150 м.
Имеется вариант развития, когда при достижении половины или более пути между наземными соседними станциями связь «этажерки» передается на соседнюю наземную станцию управления.
Для указанного способа характерны ограниченные функциональные возможности, поскольку с его помощью нельзя проводить разведку и обследовать техническое состояние тоннельных канализационных коллекторов, т.к.:
- радиоканал связи БПЛА с наземной базовой станцией управления в условиях закрытых подземных выработок (тоннельных канализационных коллекторов), когда невозможна прямая видимость, не обеспечит устойчивую связь;
- безопасность полета и условия выполнения поставленной задачи лимитируются расстоянием ведущего БПЛА только от земной поверхности. В условиях подземных закрытых выработок (тоннельных канализационных коллекторов) этого недостаточно. Необходимо дополнительно учитывать расстояние до их ограждающих конструкций (верхних и боковых контуров подземных выработок), а при прохождении шахт – возможное изменение уровня начала следующего участка;
- фактическая конфигурация тоннельных канализационных коллекторов, проложенных на большой глубине и в разное время может отличаться от проектной.
Задачей настоящего изобретения является расширение функциональных возможностей известного способа.
Поставленная задача решается тем, что в известном способе, основанном на том, что берется беспилотный летательный аппарат (БПЛА), который в пределах прямой видимости по радиоканалу связан с наземной базовой станцией управления, что позволяет поддерживать с ним устойчивую связь, передавая полученные данные наблюдения и получая команды управления полетом или изменения программы полета, допустимые расстояния БПЛА от предельных границ полета определяются безопасностью полета и безусловным выполнением поставленной задачи в соответствии с настоящим изобретением применяют БПЛА с возможностью вертикального, горизонтального перемещений и зависания в воздушном пространстве, в качестве предельных границ полета принимают обделку тоннельного канализационного коллектора и уровень воды в нем, на БПЛА устанавливают полезную нагрузку, позволяющую хранить полетное задание, контролировать расстояние от БПЛА до предельных границ полета по r направлениям, определять координаты БПЛА, получать разведывательную информацию, проводить обследование технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля, а процесс обследования осуществляют в восемь этапов:
а) принимают систему трехмерных координат X, Y, Z;
б) создают на основании имеющейся информации в первом приближении объемную модель канализационного тоннельного коллектора, включающую в себя координаты осей начала  и конца
и конца  его m участков, где i – номер шахты канализационного тоннельного коллектора, i=0, 1, 2, …, m;
его m участков, где i – номер шахты канализационного тоннельного коллектора, i=0, 1, 2, …, m;
в) разрабатывают полетное задание для БПЛА с правом облетать препятствия и возвращаться на заданный маршрут в виде:
последовательности участков маршрута c координатами осей начала  и конца
и конца  его n участков;
его n участков;
минимальных  и максимальных
и максимальных  возможных расстояний от БПЛА до предельных границ полета, где j= 1, 2, …, n, k= 1, 2, …, r;
возможных расстояний от БПЛА до предельных границ полета, где j= 1, 2, …, n, k= 1, 2, …, r;
г) сохраняют полетное задание для БПЛА в его полезной нагрузке;
д) выводят по радиоканалу БПЛА в стартовое положение в режиме зависания над вертикальным входом в канализационный тоннельный коллектор с координатами  ;
;
е) уменьшают высоту зависания БПЛА до допустимого расстояния от уровня воды в канализационном тоннельном коллекторе с координатами  , где
, где  =
= ;
;
ж) принимают j = 1;
з) выполняют горизонтальный полет БПЛА по j - му участку канализационного тоннельного коллектора в процессе которого контролируют расстояние от БПЛА до предельных границ полета, определяют пространственные координаты по осям X, Y, Z и получают разведывательную информацию, при этом,
возвращают БПЛА в стартовое положение, считывают разведывательную информацию, анализируют результаты обследования технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля и принимают решение о приостановке, переносе времени обследования или корректировке полетного задания и продолжении выполнять обследование, начиная с этапа в) если, по меньшей мере одно из измеренных фактических расстояний  от БПЛА до предельных границ полета станет меньше минимально возможного расстояния от БПЛА до предельных границ полета,
от БПЛА до предельных границ полета станет меньше минимально возможного расстояния от БПЛА до предельных границ полета,
принимают j = j +1 и продолжают выполнять обследование, начиная с этапа в) если, по меньшей мере одно из измеренных фактических расстояний от БПЛА до предельных границ полета станет больше максимально возможного расстояния от БПЛА до предельных границ полета и j  n.
n.
Отличительными признаками заявляемого способа является:
1. Применение БПЛА с возможностью вертикального, горизонтального перемещений и зависания в воздушном пространстве;
2. Применение в качестве предельных границ полета обделки тоннельного канализационного коллектора и уровня воды в нем;
3. Установка на БПЛА полезной нагрузки, позволяющей хранить полетное задание, контролировать расстояние от БПЛА до предельных границ полета, определять координаты БПЛА, получать разведывательную информацию, проводить обследование технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля;
4. Принятие системы трехмерных координат X, Y, Z;
5. Создание на основании имеющейся информации в первом приближении объемной модели канализационного тоннельного коллектора, включающую в себя координаты осей начала и конца его m участков, где i – номер шахты канализационного тоннельного коллектора, i=0, 1, 2, …, m;
6. Разработка полетного задания для БПЛА с правом облетать препятствия и возвращаться на заданный маршрут;
7. Представление полетного задания для БПЛА в виде последовательности участков маршрута c координатами осей начала и конца его n участков, минимальных и максимальных возможных расстояний от БПЛА до предельных границ полета, где j= 1, 2, …, n, k= 1, 2, …, r;
8. Сохранение полетного задания для БПЛА в его полезной нагрузке;
9. Вывод по радиоканалу БПЛА в стартовое положение в режиме зависания над вертикальным входом в канализационный тоннельный коллектор с координатами ;
10. Уменьшение высоты зависания БПЛА до допустимого расстояния от уровня воды в канализационном тоннельном коллекторе с координатами , где =;
11. Принятие j = 1;
12. Выполнение горизонтального полета БПЛА по j - му участку канализационного тоннельного коллектора с контролем расстояния от БПЛА до предельных границ полета, определением пространственных координат по осям X, Y, Z и получением разведывательной информации;
13. Возврат БПЛА в стартовое положение, считывание разведывательной информации и принятие решения о приостановке, переносе времени обследования или корректировке полетного задания и продолжении выполнять обследование, начиная с этапа в) если, по меньшей мере одно из измеренных фактических расстояний от БПЛА до предельных границ полета станет меньше минимально возможного расстояния от БПЛА до предельных границ полета;
14. Принятие j = j +1 и продолжение выполнения обследования, начиная с этапа в) если, по меньшей мере одно из измеренных фактических расстояний от БПЛА до предельных границ полета станет больше максимально возможного расстояния от БПЛА до предельных границ полета и j n.
По сведениям, имеющимся у авторов, отличительные признаки № 1, 4, 6, 8 и 11 известны, а остальные (№ 2, 3, 5, 7, 9, 10, 12-14) - не известны. Совместное их применение позволит расширить функциональные возможности способа, т.к. с его помощью появляется возможность проводить разведку и обследовать техническое состояние тоннельных канализационных коллекторов, т.к.:
- благодаря наличию отличительных признаков № 1 – 9, 11 - 14 в условиях тоннельных канализационных коллекторов появляется возможность проводить обследование в режиме полетного задания без связи с наземной базовой станцией управления;
- благодаря наличию отличительных признаков № 2, 3, 6, 7, 10, 12 обеспечивается безопасность полета в условиях подземных закрытых выработок;
- благодаря наличию отличительных признаков № 5 и 13, обеспечивается безопасность полета в условиях подземных закрытых выработок.
Краткое описание чертежей.
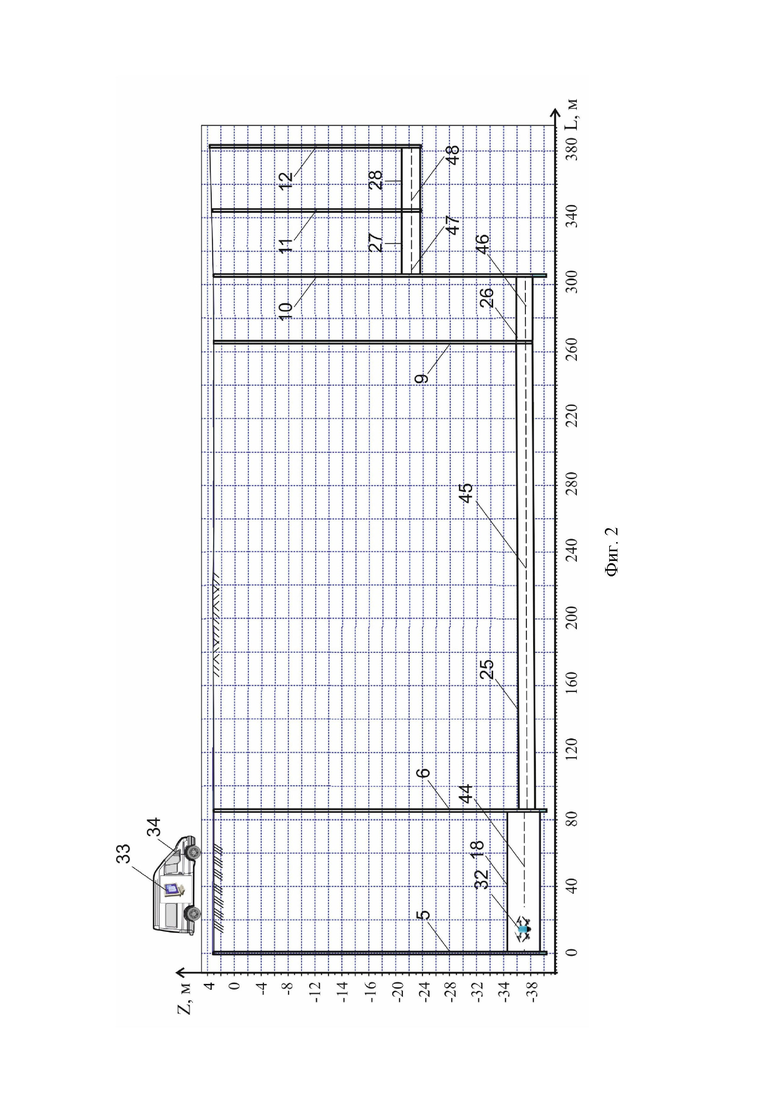
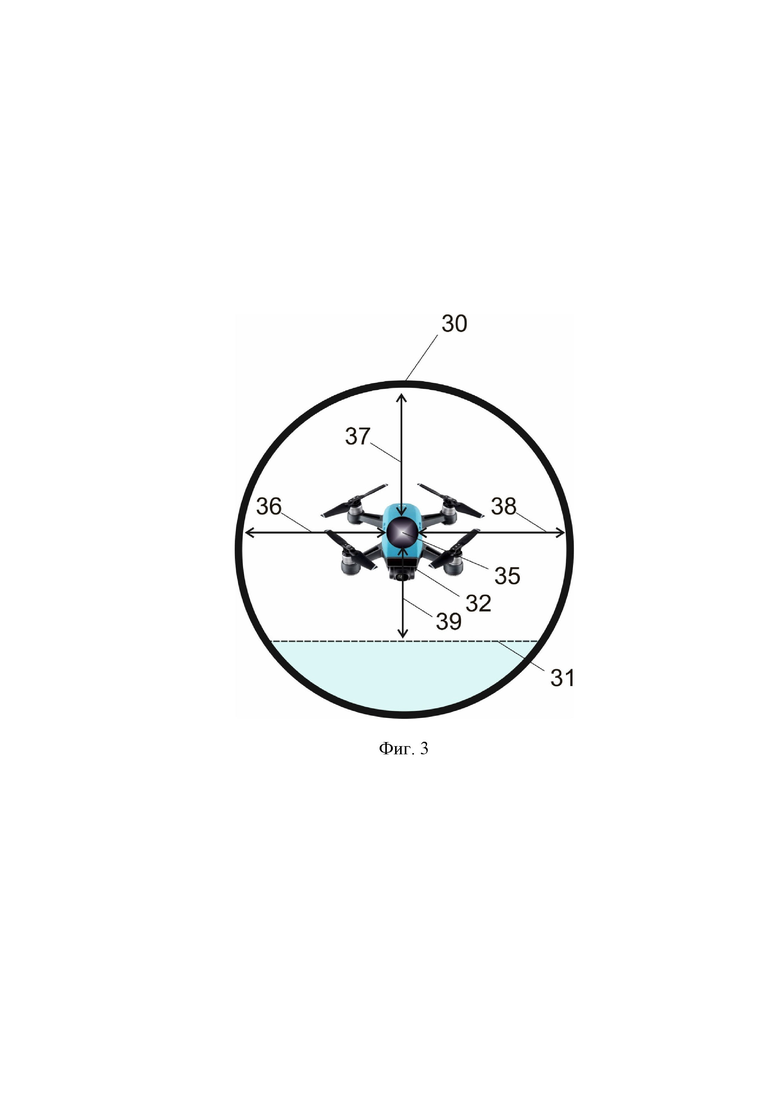
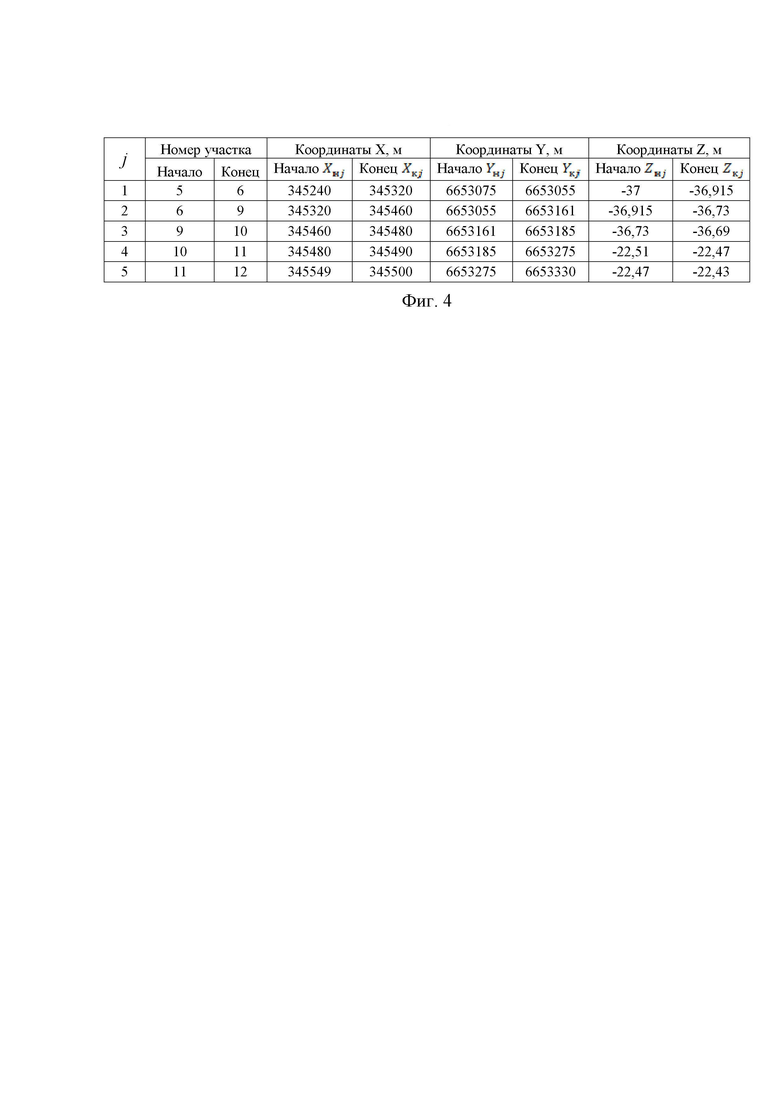
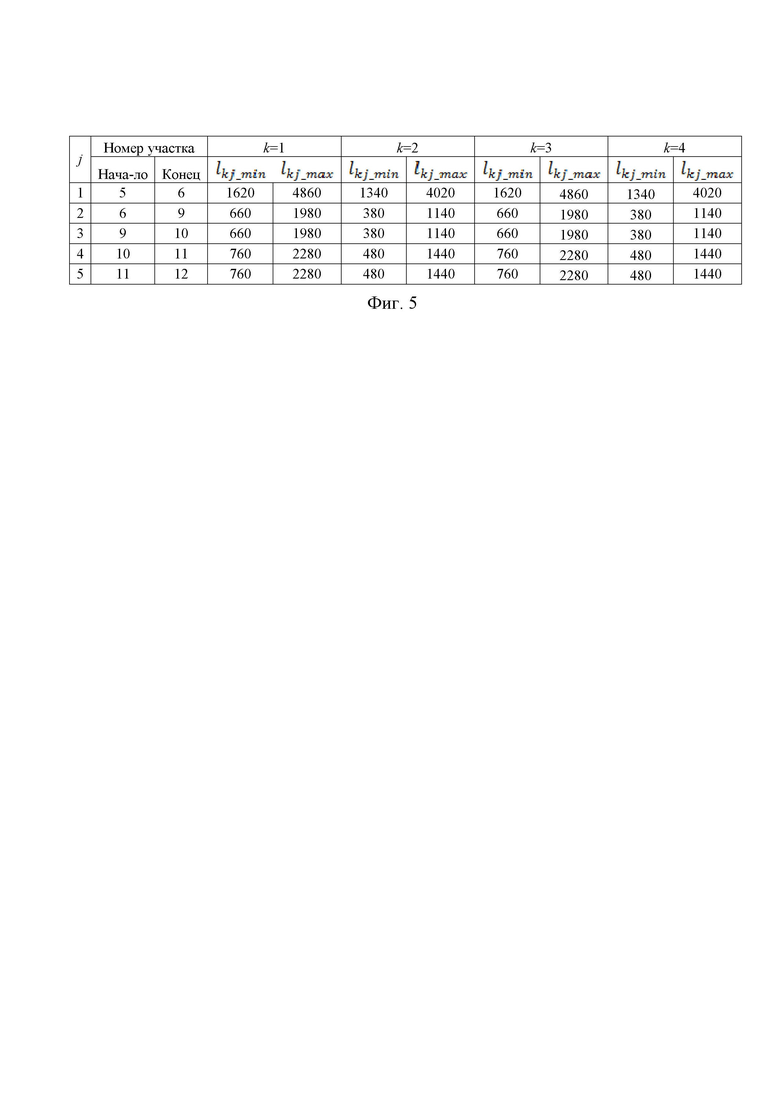
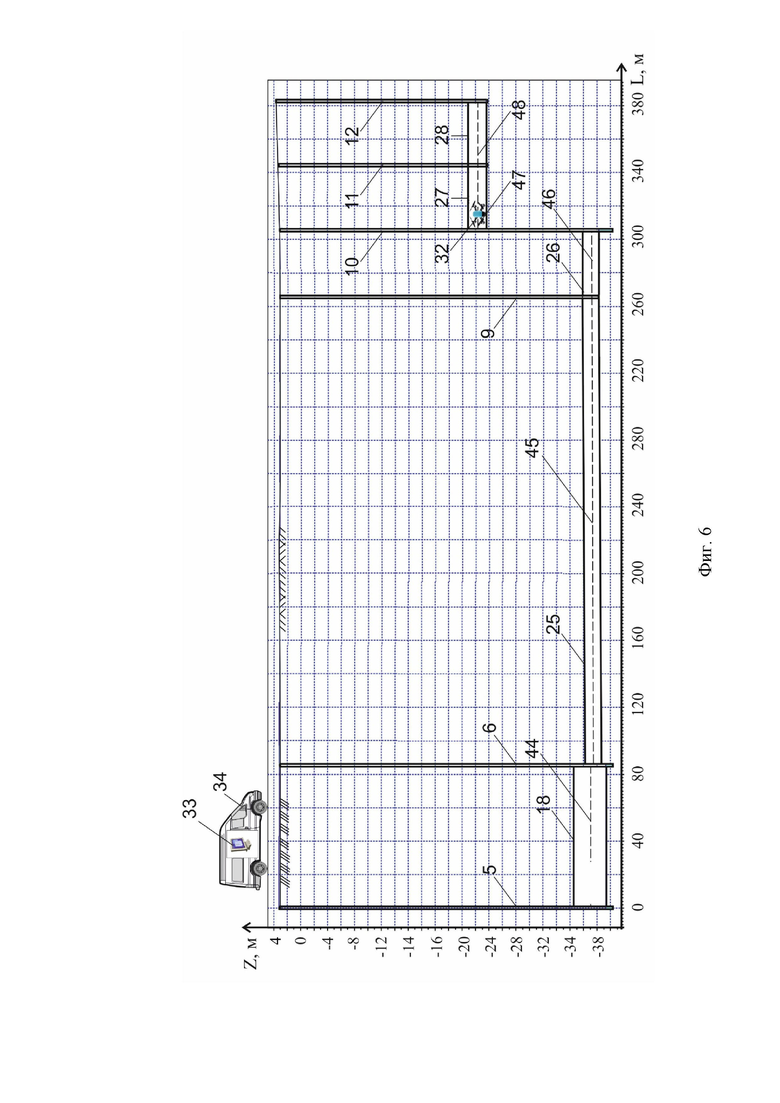
На фиг. 1 представлен пример плана обследуемого канализационного тоннельного коллектора с количеством участков m= 14; на фиг. 2 приведен профиль обследуемых пяти (n = 5) участков канализационного тоннельного коллектора, когда БПЛА находится вначале первого обследуемого участка; на фиг. 3 приведен поперечный разрез участка тоннельного канализационного коллектора на этапе горизонтального полета и получения разведывательной информации БПЛА по нему; на фиг. 4 представлены координаты их начала и конца обследуемых пяти участков; на фиг. 5 представлены значения минимальных и максимальных возможных расстояний от БПЛА до предельных границ полета, где j= 1, 2, …, n=5, k= 1, 2, …, r=4; на фиг. 6 приведен профиль обследуемых участков канализационного тоннельного коллектора, когда БПЛА находится вначале четвертого обследуемого участка.
Осуществление изобретения.
Осуществление изобретения продемонстрировано (см. фиг. 1 - 6) на примере тоннельного канализационного коллектора 1 (см. фиг. 1, 2), включающего в себя шахты 2 – 15 и проложенные между ними участки 16 – 29, т.е. m= 14. Все участки 16- 29 (см. фиг. 3) имеет обделку 30, в пределах которой протекает вода, наполняя его до уровня 31 (на фиг. 1 и 2 не показано). Система для реализации настоящего способа кроме того включает в себя:
- БПЛА 32;
- наземную базовую станцию управления 33, расположенную, например, в автомобиле 34;
- радиоканал связи БПЛА 32 с наземной базовой станцией управления 33 (на фиг. не показан).
На фиг. 3 представлено рабочее положение БПЛА 32 при горизонтальном полете внутри тоннельного канализационного коллектора 1, который имеет обделку 30. При этом, на БПЛА 32 устанавливается:
- полезная нагрузка 35, позволяющая хранить полетное задание;
- полезная нагрузка 36, позволяющая контролировать расстояния , например, 37, 38, 39, 40, от БПЛА 32 до предельных границ полета, которыми являются обделка 30 тоннельного канализационного коллектора и уровень 31 воды в нем;
- полезная нагрузка 41, позволяющая определять координаты БПЛА 32;
- полезная нагрузка 42, позволяющая получать разведывательную информацию, например, результаты визуального осмотра. Настоящим изобретением не исключается наличия другого вида разведывательной информации;
- полезная нагрузка 43, позволяющая проводить обследование технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля.
При реализации изобретения:
- применяют БПЛА 32 с возможностью вертикального, горизонтального перемещений, зависания в воздушном пространстве;
- в качестве предельных границ полета принимают обделку 30 тоннельного канализационного коллектора 1 и уровень 31 воды в нем;
- на БПЛА 32 устанавливают полезную нагрузку 35, позволяющую хранить полетное задание;
- на БПЛА 32 устанавливают полезную нагрузку 36, позволяющую контролировать расстояние от БПЛА 32 до обделки 30 и уровня воды 31, например, r расстояний 37, 38, 39, 40, т.е.  ,
,  ,
,  ,
,  ;
;
- на БПЛА 32 устанавливают полезную нагрузку 41, позволяющую определять координаты БПЛА 32;
- на БПЛА 32 устанавливают полезную нагрузку 42, позволяющую получать разведывательную информацию;
- на БПЛА 32 устанавливают полезную нагрузку 43, позволяющую проводить обследование технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля.
Для определения координат:
- на этапе а) принимают систему трехмерных координат X, Y, Z. В качестве примера на фиг. 1 представлены оси координат X и Y, а на фиг. 2 – ось Z;
- на этапе б) создают на основании имеющейся информации в первом приближении объемную модель канализационного тоннельного коллектора, включающую в себя координаты осей начала и конца его m участков, где i – номер шахты канализационного тоннельного коллектора, i=0, 1, 2, …, m;
на этапе в) разрабатывают полетное задание для БПЛА 32 с правом облетать препятствия и возвращаться на заданный маршрут в виде:
последовательности участков обследуемого маршрута c координатами осей начала и конца его n участков. На фиг. 2 в качестве примера показаны оси 44, 45, 46, 47 и 48 n = 5 его участков соответственно 18, 25, 26, 27 и 28. В дополнение, на фиг. 4 в табличной форме представлены координаты их начала и конца ;
минимальных и максимальных возможных расстояний от БПЛА до предельных границ полета, где j= 1, 2, …, n, k= 1, 2, …, r. На фиг. 5 в качестве примера в табличной форме приведены указанные значения для n = 5 обследуемых участков по r= 4 направлениям;
на этапе г) сохраняют полетное задание для БПЛА 32 в его полезной нагрузке 35;
на этапе д) выводят по радиоканалу БПЛА 32 в стартовое положение в режиме зависания над вертикальным входом (шахтой 5) в канализационный тоннельный коллектор с координатами (на фиг. не показано);
на этапе е) уменьшают высоту зависания БПЛА 32 до допустимого расстояния от уровня 31 воды в канализационном тоннельном коллекторе с координатами , где = (на фиг. не показано);
на этапе ж) принимают j = 1, т.е. переходят к исследованию первого участка;
на этапе з) выполняют горизонтальный полет БПЛА 32 по j - му участку канализационного тоннельного коллектора в процессе которого контролируют расстояние от БПЛА 32 до предельных границ полета (до обделки 30 и уровня воды 31), определяют пространственные координаты по осям X, Y, Z, получают разведывательную информацию и проводят обследование технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля (например, проводят лазерное сканирование), при этом:
1. Возвращают БПЛА 32 в стартовое положение, считывают разведывательную информацию, анализируют результаты обследования технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля и принимают решение о приостановке, переносе времени обследования или корректировке полетного задания и продолжении выполнять обследование, начиная с этапа в) если, по меньшей мере одно из измеренных фактических расстояний от БПЛА 32 до предельных границ полета станет меньше минимально возможного расстояния от БПЛА 32 до предельных границ полета (например уровень воды 31 стал достаточно высоким, не позволяющим продолжать полет или выявлено несоответствие выполненной в первом приближении объемной модели и фактической конфигурации тоннельного канализационного коллектора). При этом, в случае если уровень воды 31 стал достаточно высоким и по результатам анализа разведывательной информации и результатам обследования технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля следует, что повышение уровня связано только с увеличением притока, то принимают решение о приостановке и переносе времени обследования до снижения уровеня воды 31. Если в результате аналогичного анализа выявлено, что по меньшей мере одно из измеренных фактических расстояний от БПЛА 32 до предельных границ полета станет меньше минимально возможного расстояния от БПЛА 32 до предельных границ полета из-за, например, конструктивного уменьшения диаметра участка тоннельного коллектора, то принимают решение либо об уменьшении минимально возможного расстояния от БПЛА 32 до предельных границ полета, либо корректировке полетного задания.
2. Принимают j = j +1 и продолжают выполнять обследование, начиная с этапа в) если, по меньшей мере одно из измеренных фактических расстояний от БПЛА до предельных границ полета станет больше максимально возможного расстояния от БПЛА 32 до предельных границ полета и j n. Наличие такого факта свидетельствует, что БПЛА 32 в процессе обследования прошел очередной участок и вышел на уровень шахты, в которой некоторые или все расстояния от БПЛА до предельных границ полета станут больше максимально возможного расстояния от БПЛА 32 до предельных границ полета. В этом случае:
- в полезной нагрузке БПЛА 32, позволяющей определять его координаты с погрешностью, значения определенных координат уточняются путем замены их на координаты конца j-го участка  ;
;
- БПЛА 32 выводится в положение начала j+1 –го участка с координатами  . Для иллюстрации на фиг. 6 приведен пример такого перехода, когда БПЛА 32 после прохождения 3-го участка существенно (с -36,69 до -22,51) изменяет значение координаты Z, см. фиг. 4;
. Для иллюстрации на фиг. 6 приведен пример такого перехода, когда БПЛА 32 после прохождения 3-го участка существенно (с -36,69 до -22,51) изменяет значение координаты Z, см. фиг. 4;
- выполняется полет с получением разведывательной информации и обследованием технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля по j+1 –му участку.
Таким образом, заявляемое изобретение промышленно применимо.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обследования закрытых подземных выработок с применением беспилотных летательных аппаратов | 2018 |
|
RU2708799C1 |
| Способ дистанционного обследования разрушенных объектов инфраструктуры | 2023 |
|
RU2820176C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2800045C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП | 2022 |
|
RU2789896C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме | 2023 |
|
RU2821208C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| СПОСОБ АЭРОГАММАСПЕКТРОМЕТРИЧЕСКОЙ СЪЕМКИ ГЕОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ | 2017 |
|
RU2673505C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ЗАЛПОМ АТМОСФЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2691233C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2017 |
|
RU2719605C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
Изобретение относится к способу неразрушающего инструментального обследования канализационных тоннельных коллекторов. Для обследования используют беспилотный летательный аппарат (БПЛА), управляемый с наземной базовой станции и выполненный с возможностью зависания и перемещений в разные стороны, устанавливают на БПЛА полезную нагрузку для его управления и для проведения обследования технического состояния участков канализационных тоннельных коллекторов. Обеспечивается увеличение функциональных возможностей при проведении разведки и технического обследования канализационных тоннельных коллекторов. 6 ил.
Способ неразрушающего инструментального обследования канализационных тоннельных коллекторов, основанный на том, что берется беспилотный летательный аппарат (БПЛА), который в пределах прямой видимости по радиоканалу связан с наземной базовой станцией управления, что позволяет поддерживать с ним устойчивую связь, передавая полученные данные наблюдения и получая команды управления полетом или изменения программы полета, допустимые расстояния БПЛА от предельных границ полета определяются безопасностью полета и безусловным выполнением поставленной задачи, отличающийся тем, что применяют БПЛА с возможностью вертикального, горизонтального перемещений и зависания в воздушном пространстве, в качестве предельных границ полета принимают обделку тоннельного канализационного коллектора и уровень воды в нем, на БПЛА устанавливают полезную нагрузку, позволяющую хранить полетное задание, контролировать расстояние от БПЛА до предельных границ полета по r направлениям, определять координаты БПЛА, получать разведывательную информацию, проводить обследование технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля, а процесс обследования осуществляют в восемь этапов:
а) принимают систему трехмерных координат X, Y, Z;
б) создают на основании имеющейся информации в первом приближении объемную модель канализационного тоннельного коллектора, включающую в себя координаты осей начала  и конца
и конца  его m участков, где i – номер шахты канализационного тоннельного коллектора, i=0, 1, 2, …, m;
его m участков, где i – номер шахты канализационного тоннельного коллектора, i=0, 1, 2, …, m;
в) разрабатывают полетное задание для БПЛА с правом облетать препятствия и возвращаться на заданный маршрут в виде:
последовательности участков маршрута c координатами осей начала  и конца
и конца  его n участков;
его n участков;
минимальных  и максимальных
и максимальных  возможных расстояний от БПЛА до предельных границ полета, где j = 1, 2, …, n, k = 1, 2, …, r;
возможных расстояний от БПЛА до предельных границ полета, где j = 1, 2, …, n, k = 1, 2, …, r;
г) сохраняют полетное задание для БПЛА в его полезной нагрузке;
д) выводят по радиоканалу БПЛА в стартовое положение в режиме зависания над вертикальным входом в канализационный тоннельный коллектор с координатами  ;
;
е) уменьшают высоту зависания БПЛА до допустимого расстояния от уровня воды в канализационном тоннельном коллекторе с координатами  , где
, где  =
= ;
;
ж) принимают j = 1;
з) выполняют горизонтальный полет БПЛА по j-му участку канализационного тоннельного коллектора, в процессе которого контролируют расстояние от БПЛА до предельных границ полета, определяют пространственные координаты по осям X, Y, Z и получают разведывательную информацию, при этом
возвращают БПЛА в стартовое положение, считывают разведывательную информацию, анализируют результаты обследования технического состояния участков канализационных тоннельных коллекторов неразрушающими методами контроля и принимают решение о приостановке, переносе времени обследования или корректировке полетного задания и продолжении выполнять обследование, начиная с этапа в), если по меньшей мере одно из измеренных фактических расстояний  от БПЛА до предельных границ полета станет меньше минимально возможного расстояния от БПЛА до предельных границ полета,
от БПЛА до предельных границ полета станет меньше минимально возможного расстояния от БПЛА до предельных границ полета,
принимают j = j + 1 и продолжают выполнять обследование, начиная с этапа в), если по меньшей мере одно из измеренных фактических расстояний от БПЛА до предельных границ полета станет больше максимально возможного расстояния от БПЛА до предельных границ полета и j  n.
n.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| СПОСОБ ПРИМЕНЕНИЯ РОЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ, ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2656281C1 |
| WO 2018099699 A1, 07.06.2018 | |||
| US 9727834 B2, 08.08.2017 | |||
| Станок для групповой доводки желобов колец подшипников качения | 1960 |
|
SU136205A1 |

