Область техники, к которой относится изобретение
Настоящее изобретение относится к области беспилотных летательных аппаратов и, более конкретно, к способу управления полетом беспилотного летательного аппарата, устройства управления полетом беспилотного летательного аппарата и относится к беспилотному летательному аппарату.
Уровень техники
Беспилотный летательный аппарат (БПЛА) представляет собой беспилотное воздушное судно, которым управляют с помощью устройства дистанционного управления по радиоканалу и с помощью устройства управления с независимой программой. БПЛА широко используют при защите сельскохозяйственных растений, управлении в городе, геологии, метеорологии, электроэнергетике, помощи при стихийных бедствиях, видеосъемке и других областях промышленности.
В качестве примера возьмем БПЛА для защиты растений. Когда БПЛА осуществляет операции по защите растений, существует два варианта полета: автономный полет и полет БПЛА под управлением устройства дистанционного управления. При управлении полетом БПЛА с помощью ручного управления со стороны устройства дистанционного управления, оператору трудно оценить ошибку, сформированную при полете БПЛА, направление полета БПЛА склонно отклоняться и это отклонение становиться все больше с течением времени, так что при фактической работе БПЛА трудно покрыть целевую область, что влияет на эффективность операции по защите растений.
Раскрытие изобретения
С учетом описанной выше проблемы, в вариантах осуществления настоящего изобретения предложен способ управления полетом БПЛА, устройство управления полетом БПЛА и соответствующий БПЛА.
В варианте осуществления настоящего изобретения предложен способ управления полетом БПЛА, который может включать в себя следующее: определяют маршрут полета БПЛА; принимают сигнал дистанционного управления, направленный с помощью устройства дистанционного управления; преобразуют сигнал дистанционного управления в регулируемый параметр полета БПЛА; формируют регулируемый параметр корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА; и выполняют полетное задание в соответствии с действием, которое указано с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и формирование регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА включает в себя следующее: когда регулируемый параметр полета в поперечном направлении равен нулю, определяют регулируемый параметр корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета; и формируют регулируемый параметр корректирования полета в соответствии с регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом регулируемый параметр корректирования полета включает в себя величину скорости полета и направление полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр корректирования полета содержит величину скорости полета и направление полета, и регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении; выполнение полетного задания в соответствии с действием, которое указано с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета, включает в себя следующее: летят до маршрута полета в соответствии с величиной скорости полета и направлением полета; и выполняют полетное задание вдоль маршрута полета в соответствии с действием, которое указывают с помощью регулируемого параметра полета в продольном направлении.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и указанный способ дополнительно включает в себя следующее: когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, оценивают, находится ли БПЛА на маршруте полета; когда результат оценки заключается в том, что БПЛА находится на маршруте полета, осуществляют зависание на маршруте полета; и когда результат оценки заключается в том, что БПЛА не находится на маршруте полета, летят до маршрута полета и осуществляют зависание на маршруте полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, полет до маршрута полета включает в себя следующее: определяют расстояние между текущим местоположением БПЛА и маршрутом полета; и летят до маршрута полета в соответствии с курсом, который указан с помощью расстояния.
В одном варианте осуществления настоящего изобретения предложено устройство управления полетом БПЛА, которое может содержать процессор, при этом процессор выполнен с возможностью выполнения следующих программных модулей, которые хранятся в памяти: модуль определения, который выполнен с возможностью определения маршрута полета БПЛА; модуль приема, который выполнен с возможностью приема сигнала дистанционного управления, направленного с помощью устройства дистанционного управления; модуль преобразования, который выполнен с возможностью преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА; модуль формирования, который выполнен с возможностью формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА; и модуль выполнения, который выполнен с возможностью выполнения полетного задания в соответствии с действием, которое указано с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и модуль формирования содержит: подмодуль определения, который выполнен с возможностью определения, когда регулируемый параметр полета в поперечном направлении равен нулю, регулируемого параметра корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета; и подмодуль формирования, который выполнен с возможностью формирования регулируемого параметра корректирования полета в соответствии с регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом регулируемый параметр корректирования полета включает в себя величину скорости полета и направление полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр корректирования полета содержит величину скорости полета и направление полета, при этом регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении, и модуль выполнения содержит: первый подмодуль выполнения, который выполнен с возможностью полета до маршрута полета в соответствии с величиной скорости полета и направлением полета; и второй подмодуль выполнения, который выполнен с возможностью выполнения полетного задания вдоль маршрута полета в соответствии с действием, которое указывают с помощью регулируемого параметра полета в продольном направлении.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и модуль выполнения содержит: подмодуль оценки, который выполнен с возможностью, когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, оценки, находится ли БПЛА на маршруте полета; подмодуль зависания, который выполнен с возможностью зависания на маршруте полета, когда БПЛА перемещается по маршруту полета; и подмодуль выполнения, который выполнен с возможностью полета до маршрута полета и зависания на маршруте полета, когда БПЛА не перемещается по маршруту полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, подмодуль выполнения содержит: элемент определения, который выполнен с возможностью определения расстояния между текущим местоположением БПЛА и маршрутом полета; и элемент полета, который выполнен с возможностью полета до маршрута полета в соответствии с курсом, который указан с помощью расстояния.
Для решения указанной выше проблемы, в варианте осуществления настоящего изобретения предложен БПЛА, который может содержать систему управления полетом, при этом система управления полетом содержит контроллер полета, компонент получения местоположения и компонент связи, при этом компонент связи выполнен с возможностью приема сигнала дистанционного управления, направленного с помощью устройства дистанционного управления, и передачи сигнала дистанционного управления на контроллер полета; компонент получения местоположения выполнен с возможностью получения текущего местоположения БПЛА и передачи текущего местоположения БПЛА на контроллер полета; и контроллер полета выполнен с возможностью определения маршрута полета БПЛА, преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА, формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА и управления БПЛА с целью выполнения полетного задания в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении; и контроллер полета выполнен с возможностью, при формировании регулируемого параметра корректирования полета БПЛА, определения, если регулируемый параметр корректирования полета в поперечном направлении равен нулю, регулируемого параметра корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета, и формирования регулируемого параметра корректирования полета в соответствии с регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом регулируемый параметр корректирования полета содержит величину скорости полета и направление полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр корректирования полета содержит величину скорости полета и направление полета, и регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении; и контроллер полета выполнен с возможностью, при управлении БПЛА с целью выполнения полетного задания в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, такого управления БПЛА, чтобы он летел до маршрута полета в соответствии с величиной скорости полета и направлением полета, и такого управления БПЛА, чтобы он выполнял полетное задание вдоль маршрута полета в соответствии с действием, которое указывают с помощью регулируемого параметра полета в продольном направлении.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении; и контроллер полета выполнен с возможностью, при управлении БПЛА с целью выполнения полетного задания в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, оценки, когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, находится ли БПЛА на маршруте полета, такого управления БПЛА, если БПЛА перемещается по маршруту полета, чтобы он зависал на маршруте полета, и такого управления БПЛА, если БПЛА не перемещается по маршруту полета, чтобы он летел до маршрута полета и зависал на маршруте полета.
В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, контроллер полета выполнен с возможностью, при управлении БПЛА с целью полета до маршрута полета, определения расстояния между текущим местоположением БПЛА и маршрутом полета, и полета до маршрута полета в соответствии с курсом, который указан с помощью расстояния.
По сравнению с уровнем техники, варианты осуществления настоящего изобретения обладают следующими достоинствами.
В соответствии с вариантами осуществления настоящего изобретения, после определения маршрута полета БПЛА, сигнал дистанционного управления, направленный с помощью устройства дистанционного управления, принимают и преобразуют в регулируемый параметр полета БПЛА, регулируемый параметр корректирования полета формируют в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА, и могут дальше выполнять полетное задание в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета. В соответствии с вариантами осуществления настоящего изобретения, когда полетом БПЛА управляют вручную с использованием устройства дистанционного управления, в соответствии с регулируемым параметром корректирования в поперечном направлении, можно обеспечить то, что БПЛА не отклоняется, а летит по корректному маршруту все время в случае длинного полета, таким образом, улучшают точность полета. БПЛА защиты растений увеличивается точность и эффективность операций по защите растений.
Краткое описание чертежей
Фиг. 1 - блок-схема с этапами способа управления полетом БПЛА в соответствии с одним вариантом осуществления настоящего изобретения;
фиг. 2 - получение регулируемого параметра корректирования полета в соответствии с настоящим изобретением;
фиг. 3 - блок-схема с этапами способа управления полетом БПЛА в соответствии с другим вариантом осуществления настоящего изобретения;
фиг. 4 - схема области полета в соответствии с настоящим изобретением;
фиг. 5 - структурная схема устройства управления полетом БПЛА в соответствии с одним вариантом осуществления настоящего изобретения; и
фиг. 6 - структурная схема БПЛА в соответствии с настоящим изобретением.
Подробное описание вариантов осуществления изобретения
Чтобы упомянутые выше цели, признаки и достоинства настоящего изобретения стали яснее и понятнее, настоящее изобретение дополнительно подробно описано ниже со ссылками на чертежи и конкретные варианты реализации.
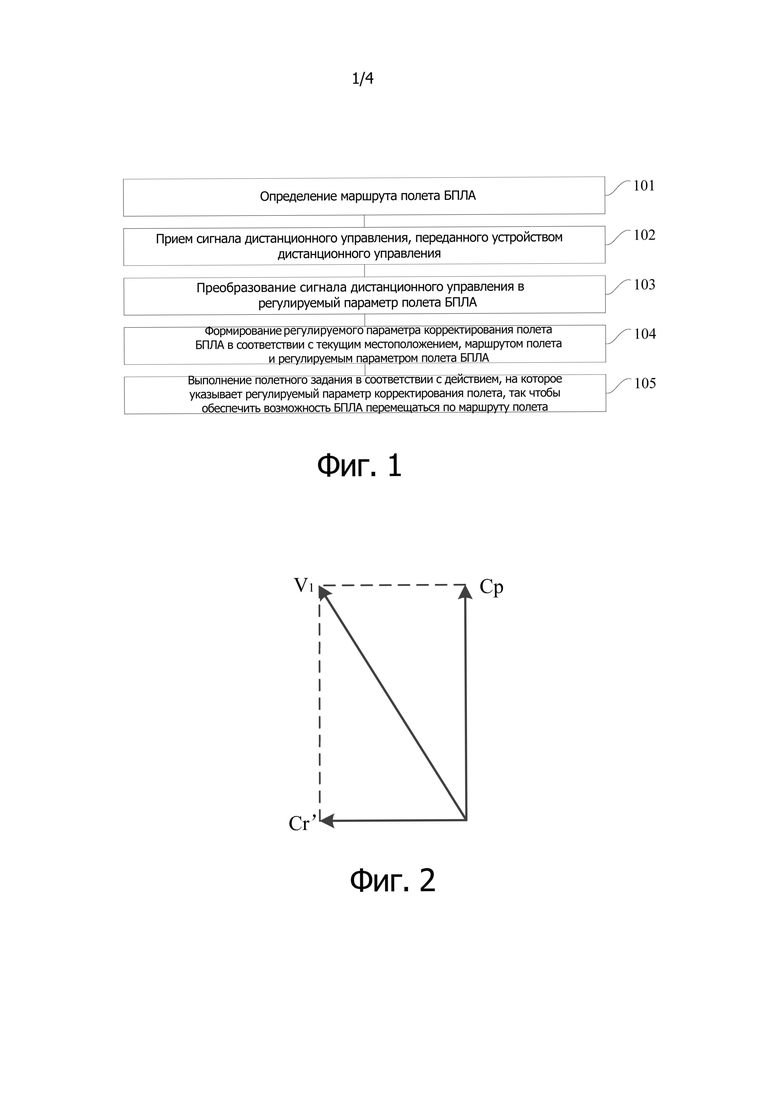
На фиг. 1 показана блок-схема с этапами способа управления полетом БПЛА в соответствии с одним вариантом осуществления настоящего изобретения. Более конкретно, этот способ может включать в себя следующие этапы.
На этапе 101 определяют маршрут полета.
В этом варианте осуществления настоящего изобретения БПЛА может быть задействован в операции по защите растений, например, он может быть БПЛА защиты растений, который выполнен с возможностью осуществления операций по защите растений, таких как распыление пестицидов или распыление удобрений на землях сельскохозяйственного назначения или горных лесах, или он может быть БПЛА для осуществления других задач, таких как фотографирование или составление карт. Конкретный тип БПЛА не ограничивают в этом варианте осуществления настоящего изобретения.
В этом варианте осуществления настоящего изобретения БПЛА сначала нужно определить маршрут полета для текущего полетного задания до осуществления полетного задания и далее лететь в соответствии с маршрутом полета.
Маршрут полета, соответствующий этому варианту осуществления настоящего изобретения, может быть сформирован пользователем или оператором БПЛА с использованием картографической системы или может быть сформирован путем выбора, пользователем или оператором БПЛА, границы операции на карте. После формирования маршрута полета в систему управления полетом БПЛА может быть направлена информация о маршруте полета. После приема информации о маршруте полета, система управления полетом может начать выполнять полетное задание автономно или с помощью дистанционного управления со стороны оператора. Специалист в рассматриваемой области также может выбрать другие способы формирования маршрута полета БПЛА, что не ограничивается вариантом осуществления настоящего изобретения.
Маршрут полета, соответствующий этому варианту осуществления настоящего изобретения, может быть заранее заданным курсом или курсом, который сформирован в соответствии с фактическими потребностями. Например, маршрут полета может быть прямой линией, которая может быть представлена координатами двух точек или представлена с помощью исходной точки и направления.
Например, маршрут полета БПЛА может быть выражен следующим образом: {A = (lat1, lng1), B = (lat2, lng2), D = A -> B}, где A и B являются двумя точками, которые соответственно представляют координаты широты и долготы, D является направлением полета БПЛА, и A - >B указывает, что БПЛА летит от точки A до точки B. В качестве альтернативы, маршрут полета БПЛА также может быть выражен следующим образом: {A = (lat, lng), D = градус}, где A является исходной точкой полета и D является углом относительно истинного направления северного меридиана, то есть БПЛА может лететь от точки A в направлении, которое указано с помощью D. Конечно, специалист в рассматриваемой области также может выбрать другие способы представления маршрута полета БПЛА, что не ограничивается вариантом осуществления настоящего изобретения.
В области работы БПЛА может быть установлено несколько маршрутов полета, так что область работы БПЛА может покрыть фактическую цель операции. Например, что касается распыления пестицидов по землям сельскохозяйственного назначения, может быть установлено несколько маршрутов полета для земель сельскохозяйственного назначения.
На этапе 102 принимают сигнал дистанционного управления, переданный с помощью устройства дистанционного управления.
В этом варианте осуществления настоящего изобретения БПЛА может быть дроном, которым управляют вручную с помощью устройства дистанционного управления с целью управления полетом. Устройство дистанционного управления может быть устройством дистанционного управления с джойстиком, который, по умолчанию, может быть расположен в середине устройства дистанционного управления. Когда пользователь толкает джойстик вперед, БПЛА может управляться так, чтобы он летел вперед, а когда пользователь тянет джойстик назад, БПЛА может управляться так, чтобы он летел назад. Аналогично, когда пользователь управляет джойстиком так, чтобы он перемещался влево или вправо, БПЛА может управляться так, чтобы он летел влево или вправо. Конечно, специалист в рассматриваемой области может установить соответствующее соотношение между разными режимами работы и состояниями полета в соответствии с фактическими потребностями, и пользователь управляет полетом БПЛА в соответствии с конкретным режимом работы, что не ограничивается вариантом осуществления настоящего изобретения.
Устройство дистанционного управления также может быть устройством дистанционного управления с сенсорным экраном, который отображает рабочий элемент управления, которым можно управлять аналогично джойстику. Специалист в рассматриваемой области также может использовать другие типы устройств дистанционного управления, что не ограничивается вариантом осуществления настоящего изобретения.
В этом варианте осуществления настоящего изобретения, когда БПЛА выполняет полетное задание, пользователь может управлять полетом БПЛА путем управления устройством дистанционного управления. В качестве по меньшей мере одного альтернативного варианта осуществления изобретения, когда пользователь управляет джойстиком, дистанционный контроллер может выдать сигнал дистанционного управления БПЛА, так что БПЛА может отрегулировать текущее состояние полета в соответствии с указанием из сигнала дистанционного управления после приема сигнала дистанционного управления.
На этапе 103 сигнал дистанционного управления преобразуют в регулируемый параметр полета БПЛА.
В настоящем варианте осуществления изобретения сигнал дистанционного управления может быть сигналом широтно-импульсной модуляции, например, сигналом широтно-импульсной модуляции длительностью от 1 мс до 2 мс. После приема сигнала дистанционного управления, переданного устройством дистанционного управления, БПЛА может дополнительно преобразовать информацию дистанционного управления в регулируемый параметр полета БПЛА.
В качестве по меньшей мере одной альтернативной реализации, сигнал дистанционного управления может быть преобразован в регулируемый параметр полета БПЛА в соответствии с зависимостью между шириной импульса и скоростью полета, и регулируемый параметр полета может содержать регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении.
В этом варианте осуществления настоящего изобретения регулируемый параметр полета может быть представлен как {Cp, Cr}, где Cp представляет регулируемый параметр полета в продольном направлении, то есть величину скорости и направление полета в продольном направлении, а Cr представляет регулируемый параметр полета в поперечном направлении, то есть величину скорости и направление полета в поперечном направлении.
В качестве примера настоящего изобретения, когда Ср является положительным числом, оно указывает, что БПЛА летит вперед; когда Ср является отрицательным числом, оно указывает, что БПЛА летит назад; когда Сr является положительным числом, оно указывает, что БПЛА летит влево; когда Сr является отрицательным числом, оно указывает, что БПЛА летит вправо. Конечно, специалисты в рассматриваемой области могут установить соответствие между конкретным значением и направлением полета БПЛА в соответствии с фактическими потребностями. Например, когда Ср является положительным числом, это указывает на то, что БПЛА летит назад, а когда Ср является отрицательным числом, это указывает на то, что БПЛА летит вперед, что не ограничивается вариантом осуществления настоящего изобретения.
На этапе 104, регулируемый параметр корректирования полета БПЛА формируют в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА.
В этом варианте осуществления настоящего изобретения, чтобы обеспечить то, что БПЛА может постоянно лететь вдоль определенного маршрута полета, регулируемый параметр корректирования полета БПЛА может быть сформирован в режиме реального времени в соответствии с отклонением текущего местоположения БПЛА от маршрута полета и в соответствии с регулируемым параметром полета, который получен путем преобразования сигнала дистанционного управления, переданного устройством дистанционного управления, которым управляет пользователь, и БПЛА автоматически осуществляет корректировку отклонения от маршрута в соответствии с указанием регулируемого параметра корректирования полета, чтобы БПЛА всегда располагался на правильном маршруте полета.
Например, когда регулируемый параметр полета в поперечном направлении равен нулю и регулируемый параметр полета в продольном направлении не равен нулю, то есть когда Cr = 0 и Cp ≠ 0, можно считать, что БПЛА летит по прямой линии, при этом, когда Cp > 0, то это указывает на то, что БПЛА летит вперед, а когда Cp < 0, то это указывает на то, что БПЛА летит назад. В это время, регулируемый параметр корректирования в поперечном направлении может быть определен в соответствии с текущим местоположением и маршрутом полета БПЛА и БПЛА корректируют отклонение от маршрута, так что БПЛА может всегда перемещаться по корректному маршруту полета.
В этом варианте осуществления настоящего изобретения заранее заданный контроллер, такой как PID контроллер, может быть использован для формирования регулируемого параметра корректирования полета БПЛА для реализации корректировки отклонения БПЛА от маршрута.
В настоящее время технология автоматического управления с обратной связью основана на концепции обратной связи для уменьшения неопределенности, и элементы теории обратной связи включают в себя три составляющие: измерение, сравнение и выполнение. Ключом является измерение фактического значения регулируемой переменной, которое сравнивают с ожидаемым значением. Отклонение фактического значения от ожидаемого значения используют для корректировки ответа системы для выполнения управления по корректированию. В инженерной практике наиболее широко используемый закон по управлению корректирования заключается в пропорциональном, интегральном и дифференциальном управлении, которое называется PID управлением. PID контроллер (пропорционально-интегрально-дифференциальный контроллер) является компонентом с обратной связью, который широко используют в промышленных приложениях по управлению и который содержит пропорциональный блок Р, интегральный блок I и дифференциальный блок D. Основой PID управления является пропорциональное управление; интегральное управление может исключить систематическую ошибку; и дифференциальное управление может увеличить скорость ответа систем с большой инерцией и ослабить чрезмерную динамику развития.
В этом варианте осуществления настоящего изобретения, в ходе полета БПЛА, PID контроллер может подавать на выход регулируемый параметр корректирования в поперечном направлении в режиме реального времени для корректировки в ходе полета отклонения БПЛА от маршрута полета.
В этом варианте осуществления настоящего изобретения параметр Cr' может быть использован для указания регулируемого параметра корректирования в поперечном направлении, который аналогичен регулируемому параметру Cr полета в поперечном направлении. Когда Cr' > 0, регулируемый параметр корректирования в поперечном направлении указывает, что БПЛА летит влево, а когда Cr' < 0, регулируемый параметр корректирования в поперечном направлении указывает, что БПЛА летит вправо.
После формирования регулируемого параметра корректирования в поперечном направлении, регулируемый параметр корректирования полета может быть также получен в соответствии с регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом регулируемый параметр корректирования полета включает в себя величину скорости полета и направление полета.
На фиг. 2 схематично показано формирование регулируемого параметра корректирования полета в соответствии с настоящим изобретением. На фиг. 2 Cp > 0 указывает, что БПЛА летит вперед, а Cr' > 0 указывает, что БПЛА летит влево, так что регулируемый параметр V1 корректирования полета, сформированный в соответствии с Cp и Cr', дает направление полета на северо-запад, а скорость полета для регулируемого параметра V1 корректировки полета может быть получен в соответствии с формулой sqrt (Cp<2> и Cr'<2>), где sqrt представляет квадратный корень суммы квадратов Cp и Cr'.
Следует понимать, что, когда регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении не равны нулю, то есть Cp ≠ 0 и Cr ≠ 0, то БПЛА может лететь в соответствии со скоростью полета и направлением, которые заданы с помощью регулируемого параметра полета в продольном направлении и регулируемого параметра полета в поперечном направлении без корректировки отклонения от маршрута полета БПЛА.
Например, когда Cr > 0 и Cp > 0, можно считать, что БПЛА корректируется влево одновременно при полете вперед и назад. На данном этапе, можно не оценивать, отклоняется ли БПЛА от маршрута полета, то есть корректировка отклонения от маршрута БПЛА не выполняется, так что скорость полета может быть сформирована в соответствии с Cp и Cr, и далее БПЛА может лететь в соответствии с этой скоростью полета.
На этапе 105 выполняется полетное задание в соответствии с действием, указанным регулируемым параметром корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В этом варианте осуществления настоящего изобретения, после определения регулируемого параметра корректирования полета, БПЛА может выполнять полетное задание в соответствии с действием, указанным с помощью регулируемого параметра корректирования полета, таким образом предоставляя возможность БПЛА лететь в соответствии с маршрутом полета.
В качестве по меньшей мере одной альтернативной реализации, БПЛА может лететь к маршруту полета согласно величине скорости полета и направлению полета, включенных в регулируемый параметр корректировки полета. Когда БПЛА уже находится на маршруте полета, БПЛА может выполнить полетное задание вдоль маршрута полета в соответствии с действием, указанным с помощью регулируемого параметра полета в продольном направлении.
Следует понимать, что в ходе полета, БПЛА может в режиме реального времени оценивать, принимать ли команду на повторную установку маршрута полета. Когда определен новый маршрут полета, БПЛА может лететь вдоль нового маршрута полета в соответствии с приведенными выше этапами.
В этом варианте осуществления настоящего изобретения, после определения маршрута полета БПЛА, сигнал дистанционного управления, переданный с помощью устройства дистанционного управления, принимается и преобразуется в регулируемый параметр полета БПЛА, регулируемый параметр корректирования полета формируется в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА, и полетное задание может дальше выполняться в соответствии с действием, указанным с помощью регулируемого параметра корректирования полета, так чтобы БПЛА имел возможность перемещаться по маршруту полета. В соответствии с вариантами осуществления настоящего изобретения, когда полетом БПЛА управляют вручную с использованием устройства дистанционного управления, можно обеспечить, что БПЛА не отклоняется, а летит по правильному маршруту все время в случае длинного полета, таким образом, улучшая точность полета. БПЛА для защиты растений увеличивается точность и эффективность операций по защите растений.
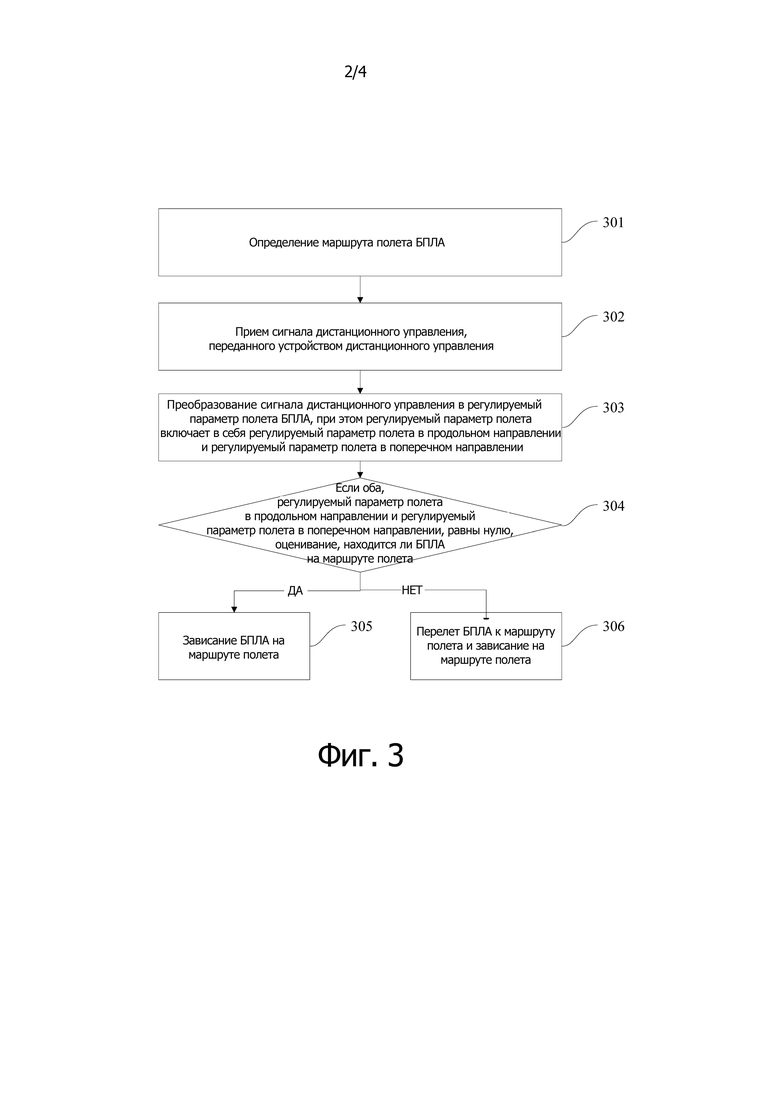
На фиг. 3 показана блок-схема с этапами способа управления полетом БПЛА в соответствии с другим вариантом осуществления настоящего изобретения. Более конкретно, этот способ может включать в себя следующие этапы.
На этапе 301 определяют маршрут полета.
В этом варианте осуществления настоящего изобретения, БПЛА может выполнять полет с ручным управлением с помощью устройства дистанционного управления, и этот БПЛА может применяться в качестве БПЛА для защиты растений, который выполнен с возможностью осуществления операций по защите растений, таких как распыление пестицидов или распыление удобрений на земли сельскохозяйственного назначения или горные леса. Конечно, БПЛА также может быть БПЛА для выполнения других заданий, таких как фотографирование или составление карт. Конкретным типом БПЛА этот вариант осуществления настоящего изобретения не ограничен.
В этом варианте осуществления настоящего изобретения, до выполнения полетного задания, БПЛА может сначала определить маршрут полета для выполнения текущего полетного задания, и маршрут полета может быть заранее заданным курсом или курсом, сформированным в соответствии с фактическими потребностями. Например, маршрут полета может быть прямой линией.
На этапе 302 принимается сигнал дистанционного управления, переданный устройством дистанционного управления.
На этапе 303 сигнал дистанционного управления преобразуется в регулируемый параметр полета БПЛА, при этом регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении.
В этом варианте осуществления настоящего изобретения БПЛА может лететь вдоль определенного маршрута при ручном управлении пользователем. Например, пользователь может выдавать сигнал дистанционного управления БПЛА путем управления джойстиком дистанционного контроллера.
Обычно сигнал дистанционного управления может быть сигналом широтно-импульсной модуляции. Следовательно, после приема упомянутого сигнала дистанционного управления, БПЛА может преобразовать сигнал дистанционного управления в регулируемый параметр полета БПЛА в соответствии с прямой пропорциональной зависимостью между шириной импульса и скоростью полета, и регулируемый параметр полета может содержать регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении.
В этом варианте осуществления настоящего изобретения регулируемый параметр полета может быть выражен как {Cp, Cr}, где Cp представляет регулируемый параметр полета в продольном направлении, а Cr представляет регулируемый параметр полета в поперечном направлении.
На этапе 304, когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, оценивают, находится ли БПЛА на маршруте полета.
В этом варианте осуществления настоящего изобретения, когда регулируемый параметр полета в продольном направлении Cp = 0 и регулируемый параметр полета в поперечном направлении Cr = 0, можно считать, что БПЛА в текущий момент находится в состоянии зависания и, на данном этапе, можно дополнительно оценить, находится ли текущее положение зависания БПЛА на маршруте полета. Если да, то можно выполнять этап 305, в противном случае, может быть выполнен этап 306.
На этапе 305, БПЛА зависает на маршруте полета.
На этапе 306, БПЛА летит до маршрута полета и зависает на маршруте полета.
В этом варианте осуществления настоящего изобретения, если текущее положение зависания БПЛА находится на маршруте полета, БПЛА можно управлять так, чтобы он продолжал зависать в текущем положении, ожидая сигнала управления; если текущее положение зависания БПЛА не находится на маршруте полета, то БПЛА можно управлять так, чтобы он летел назад к маршруту полета.
В качестве по меньшей мере одной альтернативной реализации, PID контроллер может быть использован для определения расстояния между текущим местоположением БПЛА и маршрутом полета, и затем он может быть использован для управления БПЛА, чтобы БПЛА летел к маршруту полета в соответствии с курсом, указанным с помощью упомянутого расстояния.
В этом варианте осуществления настоящего изобретения, расстояние может быть расстоянием по вертикали между текущим местоположением БПЛА и маршрутом полета, то есть расстоянием от точки до прямой линии, так что БПЛА может возвратиться к маршруту полета благодаря полету по кратчайшему пути. Конечно, специалист в рассматриваемой области также может выбрать другие пути в качестве расстояния между текущим местоположением БПЛА и маршрутом полета в соответствии с фактическими потребностями, что не ограничивается вариантом осуществления настоящего изобретения.
В соответствии с вариантами осуществления настоящего изобретения, когда полетом БПЛА управляют вручную с использованием устройства дистанционного управления, когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, которые получены с помощью преобразования сигнала дистанционного управления, равны нулю, если БПЛА в текущий момент времени не находится на маршруте полета, то БПЛА может автоматически лететь назад до маршрута полета, и может быть обеспечено то, что БПЛА не отклоняется, а всегда расположен на корректном маршруте все время в случае длинного полета, таким образом, увеличивается точность полета.
Для легкости понимания, способ управления полетом БПЛА, соответствующий настоящему изобретению, ниже будет описан с помощью полного примера.
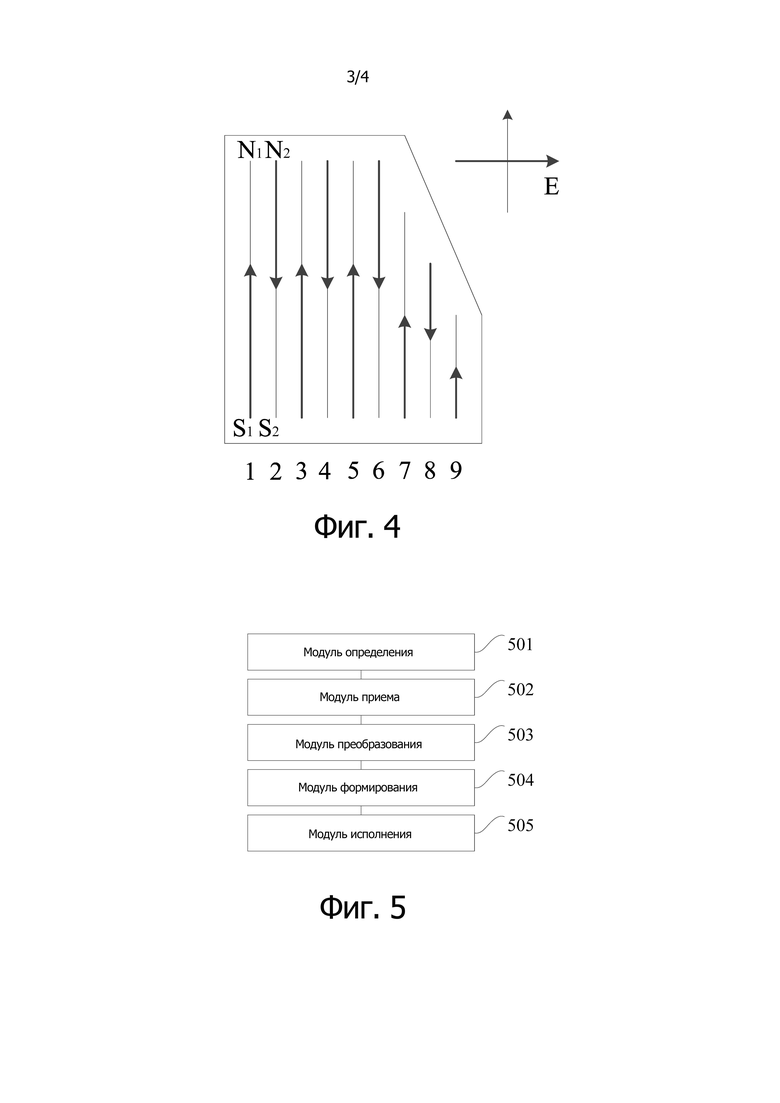
На фиг. 4 схематично показана область полета в соответствии с настоящим изобретением. Область полета, показанная на фиг. 4, содержит 9 маршрутов, область полета может быть областью земель сельскохозяйственного назначения, где нужно осуществить операции по защите растений, и БПЛА для защиты растений может выполнить операцию по защите растений для этой области земель сельскохозяйственного назначения вдоль указанных 9 маршрутов. Например, на области земель сельскохозяйственного назначения распыляют пестициды и так далее, при этом Е представляет указание направления на восток.
Следует заметить, что порядок меток для маршрутов просто является примером. В ходе фактического полета, БПЛА могут переключаться между любыми маршрутами; более того, знак направления на маршруте также может быть изменен на противоположный, то есть БПЛА может начать лететь вдоль первого маршрута с юга или начать с севера.
Сначала, устройство управления БПЛА может скомандовать БПЛА лететь в область работы и далее БПЛА управляют дистанционно, чтобы он работал с использованием описанного выше способа.
1. БПЛА управляют так, чтобы он летел к южной конечной точке S1 маршрута 1 {S1, N1, S1 -> N1} и в качестве маршрута полета устанавливают маршрут 1 {S1, N1, S1 -> N1}.
2. Джойстик толкают вперед и одновременно открывают систему распыления. В это время регулируемый параметр полета представляет собой {Cp > 0, Cr = 0}, так что БПЛА может лететь до N1 со скоростью Cp; в ходе полета S1 -> N1, при отклонении траектории, PID контроллер используют для получения регулируемого параметра корректирования полета {Cp, Cr'} для полета вперед и корректировки отклонения.
3. После того, как БПЛА прилетит в N1, в соответствии с фактической ситуацией, БПЛА управляют так, чтобы он переместился в северную конечную точку следующего маршрута 2 {S2, N2, N2 -> S2}, и в качестве маршрута полета устанавливают маршрут 2 {S2, N2, N2 -> S2} (то есть, переключают с маршрута 1 на маршрут 2).
4. Джойстик толкают назад и одновременно открывают систему распыления. В это время регулируемый параметр полета представляет собой {Cp < 0, Cr = 0}, так что БПЛА летит до S2 со скоростью Cp; в ходе полета N2 -> S2, при отклонении траектории PID контроллер используется для получения регулируемого параметра корректирования полета {Cp, Cr'} для полета вперед и корректировки отклонения.
5. Описанные выше этапы операции повторяют до тех пор, пока БПЛА не пролетит над всей областью полета, покрытой 9 маршрутами полета на фиг. 4.
Следует заметить, что для простоты описания варианты осуществления способа выражены как набор комбинаций действий, но специалистам в рассматриваемой области ясно, что варианты осуществления изобретения не ограничены описанной последовательностью действий, так как определенные этапы могут быть выполнены в другой последовательности или одновременно, в соответствии с вариантами осуществления настоящего изобретения. Что касается приведенного ниже описания, специалисту в рассматриваемой области также должно быть ясно, что все приведенные в описании варианты осуществления изобретения являются предпочтительными вариантами осуществления изобретения, и упомянутые действия не обязательно нужны в вариантах осуществления настоящего изобретения.
На фиг. 5 показана структурная схема устройства управления полетом БПЛА в соответствии с одним вариантом осуществления настоящего изобретения. Это устройство может содержать: модуль 501 определения, модуль 502 приема, модуль 503 преобразования, модуль 504 формирования и модуль 505 выполнения.
Модуль 501 определения выполнен с возможностью определения маршрута полета БПЛА.
Модуль 502 приема выполнен с возможностью приема сигнала дистанционного управления, направленного с помощью устройства дистанционного управления.
Модуль 503 преобразования выполнен с возможностью преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА.
Модуль 504 формирования выполнен с возможностью формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА.
Модуль 505 выполнения выполнен с возможностью выполнения полетного задания в соответствии с действием, которое указано с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В этом варианте осуществления настоящего изобретения, регулируемый параметр полета может содержать регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и модуль 504 формирования может содержать подмодуль определения и подмодуль формирования.
Подмодуль определения выполнен с возможностью определения, когда регулируемый параметр полета в поперечном направлении равен нулю, регулируемого параметра корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета.
Подмодуль формирования выполнен с возможностью формирования регулируемого параметра корректирования полета в соответствии с регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом регулируемый параметр корректирования полета включает в себя величину скорости полета и направление полета.
В варианте осуществления настоящего изобретения модуль 505 выполнения, более конкретно, может содержать первый подмодуль выполнения и второй подмодуль выполнения.
Первый подмодуль выполнения выполнен с возможностью полета до маршрута полета в соответствии с величиной скорости полета и направлением полета.
Второй подмодуль выполнения выполнен с возможностью выполнения полетного задания вдоль маршрута полета в соответствии с действием, которое указывают с помощью регулируемого параметра полета в продольном направлении.
В другом варианте осуществления настоящего изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и модуль 505 выполнения может содержать подмодуль оценки, подмодуль зависания и подмодуль выполнения.
Подмодуль оценки выполнен с возможностью, когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, оценки, находится ли БПЛА на маршруте полета.
Подмодуль зависания выполнен с возможностью зависания на маршруте полета, когда БПЛА перемещается по маршруту полета.
Подмодуль выполнения выполнен с возможностью, когда БПЛА не перемещается по маршруту полета, полета до маршрута полета и зависания на маршруте полета.
В этом варианте осуществления настоящего изобретения подмодуль выполнения может содержать элемент определения и элемент полета.
Элемент определения выполнен с возможностью определения расстояния между текущим местоположением БПЛА и маршрутом полета.
Элемент полета выполнен с возможностью полета до маршрута полета в соответствии с курсом, который указан с помощью расстояния.
Что касается варианта осуществления устройства, так как он, в основном, похож на вариант осуществления способа, его описание сравнительно просто и для соответствующих частей будем ссылаться на описание варианта осуществления способа.
В варианте осуществления настоящего изобретения также предложен другой вариант осуществления устройства управления полетом БПЛА. В настоящем варианте осуществления изобретения устройство управления полетом БПЛА содержит: процессор, при этом процессор выполнен с возможностью выполнения следующих программных модулей, которые хранятся в памяти: модуль определения, который выполнен с возможностью определения маршрута полета БПЛА; модуль приема, который выполнен с возможностью приема сигнала дистанционного управления, направленного с помощью устройства дистанционного управления; модуль преобразования, который выполнен с возможностью преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА; модуль формирования, который выполнен с возможностью формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА; и модуль выполнения, который выполнен с возможностью выполнения полетного задания в соответствии с действием, которое указано с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В одном варианте осуществления настоящего изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и модуль формирования может содержать: подмодуль определения, который выполнен с возможностью определения, когда регулируемый параметр полета в поперечном направлении равен нулю, регулируемый параметр корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета; и подмодуль формирования, который выполнен с возможностью формирования регулируемого параметра корректирования полета в соответствии с регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом регулируемый параметр корректирования полета включает в себя величину скорости полета и направление полета.
В одном варианте осуществления настоящего изобретения, регулируемый параметр корректирования полета содержит величину скорости полета и направление полета, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении, и модуль выполнения может содержать: первый подмодуль выполнения, который выполнен с возможностью полета до маршрута полета в соответствии с величиной скорости полета и направлением полета; и второй подмодуль выполнения, который выполнен с возможностью выполнения полетного задания вдоль маршрута полета в соответствии с действием, которое указывают с помощью регулируемого параметра полета в продольном направлении.
В другом варианте осуществления настоящего изобретения, регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и модуль выполнения может содержать: подмодуль оценки, который выполнен с возможностью, когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, оценки, находится ли БПЛА на маршруте полета; подмодуль зависания, который выполнен с возможностью зависания на маршруте полета, когда БПЛА перемещается по маршруту полета; и подмодуль выполнения, который выполнен с возможностью, когда БПЛА не перемещается по маршруту полета, полета до маршрута полета и зависания на маршруте полета.
В этом варианте осуществления настоящего изобретения подмодуль выполнения может содержать: элемент определения, который выполнен с возможностью определения расстояния между текущим местоположением БПЛА и маршрутом полета; и элемент полета, который выполнен с возможностью полета до маршрута полета в соответствии с курсом, который указан с помощью расстояния.
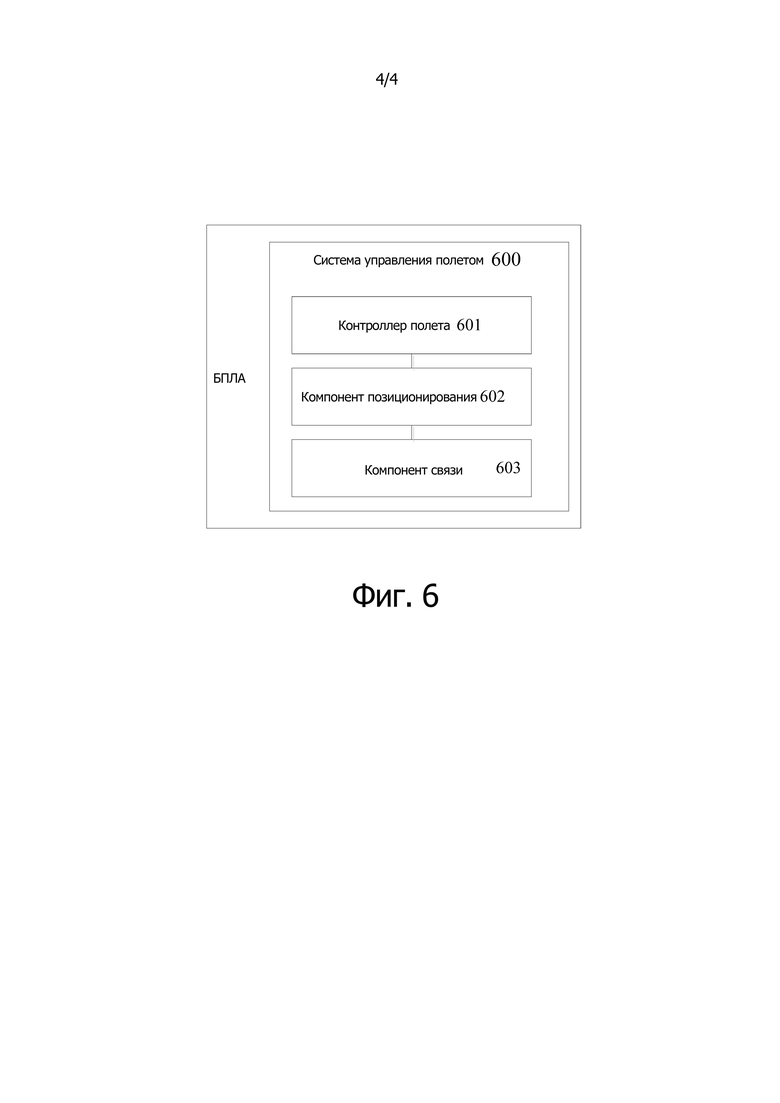
На фиг. 6 показана структурная схема БПЛА в соответствии с настоящим изобретением. БПЛА может содержать систему 600 управления полетом. Система 600 управления полетом может содержать контроллер 601 полета, компонент 602 получения местоположения и компонент 603 связи.
Компонент 603 связи выполнен с возможностью приема сигнала дистанционного управления, направленного с помощью устройства дистанционного управления, и с возможностью передачи сигнала дистанционного управления на контроллер 601 полета.
Компонент 602 получения местоположения выполнен с возможностью получения текущего местоположения БПЛА и передачи текущего местоположения БПЛА на контроллер 601 полета.
Контроллер 601 полета выполнен с возможностью определения маршрута полета БПЛА, преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА, формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА и управления БПЛА с целью выполнения полетного задания в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В качестве по меньшей мере одной альтернативной реализации, контроллер 601 полета может содержать носитель информации. Носитель информации выполнен с возможностью сохранения программы, при этом указанную программу выполняют для определения маршрута полета БПЛА, преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА, формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА и управления БПЛА с целью выполнения полетного задания в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, чтобы предоставить БПЛА возможность перемещаться по маршруту полета.
В этом варианте осуществления настоящего изобретения, регулируемый параметр полета может содержать регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении. Контроллер 601 полета выполнен с возможностью, при формировании регулируемого параметра корректирования полета БПЛА, определения, если регулируемый параметр полета в поперечном направлении равен нулю, регулируемый параметр корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета, и формирования регулируемого параметра корректирования полета в соответствии с регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом регулируемый параметр корректирования полета содержит величину скорости полета и направление полета.
В этом варианте осуществления настоящего изобретения контроллер 601 полета выполнен с возможностью, при управлении БПЛА с целью выполнения полетного задания в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, такого управления БПЛА, чтобы он летел до маршрута полета в соответствии с величиной скорости полета и направлением полета, и такого управления БПЛА, чтобы он выполнял полетное задание вдоль маршрута полета в соответствии с действием, которое указывают с помощью регулируемого параметра полета в продольном направлении.
В этом варианте осуществления настоящего изобретения, регулируемый параметр полета может содержать регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении. Контроллер 601 полета выполнен с возможностью, при управлении БПЛА с целью выполнения полетного задания в соответствии с действием, которое указывают с помощью регулируемого параметра корректирования полета, оценки, когда и регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, находится ли БПЛА на маршруте полета, такого управления БПЛА, если БПЛА перемещается по маршруту полета, чтобы он зависал на маршруте полета, и такого управления БПЛА, если БПЛА не перемещается по маршруту полета, чтобы он летел до маршрута полета и зависал на маршруте полета.
В этом варианте осуществления настоящего изобретения контроллер 601 полета выполнен с возможностью, при управлении БПЛА с целью полета до маршрута полета, определения расстояния между текущим местоположением БПЛА и маршрутом полета, и полета до маршрута полета в соответствии с курсом, который указан с помощью расстояния.
В настоящем описании постепенно приведены описания разных вариантов осуществления изобретения, при этом каждый вариант осуществления изобретения концентрируется на отличиях от других вариантов осуществления изобретения и идентичные или аналогичные части в разных вариантах осуществления изобретения могут ссылаться друг на друга.
Специалисту в рассматриваемой области должно быть ясно, что отдельный вариант осуществления настоящего изобретения может быть предложен как способ, устройство или компьютерный программный продукт. Таким образом, варианты осуществления настоящего изобретения могут принимать формы завершенных аппаратных вариантов осуществления изобретения, завершенных программных вариантов осуществления изобретения или вариантов осуществления изобретения, в которых объединено аппаратное обеспечение и программное обеспечение. Более того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, который реализуют на одном или нескольких доступных компьютерных носителях информации (в том числе, помимо прочего, на дисковой памяти, CD-ROM, оптической памяти и подобном), которые содержат доступные компьютерные программные коды.
Варианты осуществления настоящего изобретения описаны со ссылками на блок-схемы и/или структурные схемы способа, устройства (системы) и компьютерного программного продукта, которые соответствуют вариантам осуществления настоящего изобретения. Следует понимать, что каждая ветвь и/или блок в блок-схемах и/или структурных схемах и комбинация ветвей и/или блоков в блок-схемах и/или структурных схемах могут быть реализованы с помощью компьютерных программных команд. Эти компьютерные программные команды могут быть предназначены для компьютера общего назначения, специализированного компьютера, встроенного процессора или процессоров других программируемых конечных устройств обработки данных для формирования машины, так что с помощью команд, исполняемых с помощью компьютеров или процессоров других программируемых конечных устройств обработки данных, формируют устройство, обладающее функциями, спроектированными в одной или нескольких ветвях блок-схем и/или одном или нескольких блоках структурных схем.
Эти компьютерные программные команды также могут храниться в считываемой компьютером памяти, которая способна побуждать компьютеры или другие программируемые конечные устройства обработки данных работать в конкретном режиме, так что с помощью команд, хранящихся в считываемой компьютером памяти, формируют готовый продукт, содержащий командное устройство, и это командное устройство обладает функциями, которые спроектированы в одной или нескольких ветвях блок-схем и/или одном или нескольких блоках структурных схем.
Эти компьютерные программные команды также могут быть загружены на компьютеры или другие программируемые конечные устройства обработки данных, так что обработка, реализуемая с помощью компьютеров, реализуется с помощью выполнения набора этапов операции на компьютерах или других программируемых конечных устройствах и, следовательно, команды, выполняемые на компьютерах или на других программируемых конечных устройствах, обеспечивают этап получения функций, спроектированных в одной или нескольких ветвях блок-схем и/или одном или нескольких блоках структурных схем.
Хотя описаны предпочтительные варианты осуществления настоящего изобретения, специалисты в рассматриваемой области могут предложить дополнительные изменения и модификации этих вариантов осуществления изобретения, после изучения основной идеи изобретения. Следовательно, приведенная ниже формула изобретения предназначена для охвата всех предпочтительных вариантов осуществления изобретения, и все изменения и модификации находятся в пределах объема вариантов осуществления настоящего изобретения.
Наконец, также следует понимать, что в этом описании относительные термины, такие как первый и второй, используются только для отличения одной сущности или операции от другой сущности или операции, и не обязательно требуют или подразумевают то, что между этими сущностями или операциями существуют любое фактическое соотношение или порядок. Более того, термины «содержит», «включает в себя» или любые другие их вариации предназначены для обозначения не ограничивающего изобретение свойства «включения в себя», так что процесс, способ, изделие или конечное устройство, которое содержит набор элементов, включает в себя не только эти элементы, но также другие, не перечисленные элементы, или дополнительно содержит неотъемлемые элементы такого процесса, способа, изделия или конечного устройства. Условие отсутствия дополнительных ограничений, не исключает то, что в процессе, способе, изделии или конечном устройстве, который содержит элементы, определяемые с помощью фрагмента «содержащий...», существуют дополнительные аналогичные элементы.
Выше приведено подробное описание способа управления полетом БПЛА, устройства управления полетом БПЛА и БПЛА, которые предложены в настоящем изобретении. Идея и варианты реализации настоящего изобретения описаны в настоящем документе с помощью конкретных примеров. Описание вариантов осуществления изобретения нужно только для помощи в понимании способа, соответствующего настоящему изобретению, и его основных идей. Более того, для специалистов в рассматриваемой области, в соответствии с идеей настоящего изобретения, существуют изменения конкретных вариантов реализации и объемов приложения. В заключение, приведенное выше описание не должно рассматриваться как ограничение объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления полетом беспилотного летательного аппарата и беспилотная авиационная система | 2019 |
|
RU2727416C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2715104C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| СИСТЕМА И СПОСОБ ПРЕДОТВРАЩЕНИЯ НАРУШЕНИЙ ПРАВИЛ ПОЛЕТОВ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2701421C1 |
| Способ аэроэлектроразведки с применением легкого беспилотного летательного аппарата | 2020 |
|
RU2736956C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КОРРЕКЦИИ ПОЛЕТНОГО ЗАДАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2755411C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2523613C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2475802C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
Группа изобретений относится к способу и устройству управления полетом беспилотного летательного аппарата (БПЛА), содержащего такое устройство управления. Для управления полетом БПЛА определяют маршрут полета, принимают сигнал от устройства дистанционного управления, преобразуют его в регулируемый параметр полета БПЛА, формируют регулируемый параметр для корректирования полета определенным образом, выполняют полетное задание для движения по маршруту. Устройство содержит модули, выполненные с возможностью реализации этапов способа. Обеспечивается движение БПЛА без отклонений от маршрута полета. 3 н. и 12 з.п. ф-лы, 6 ил.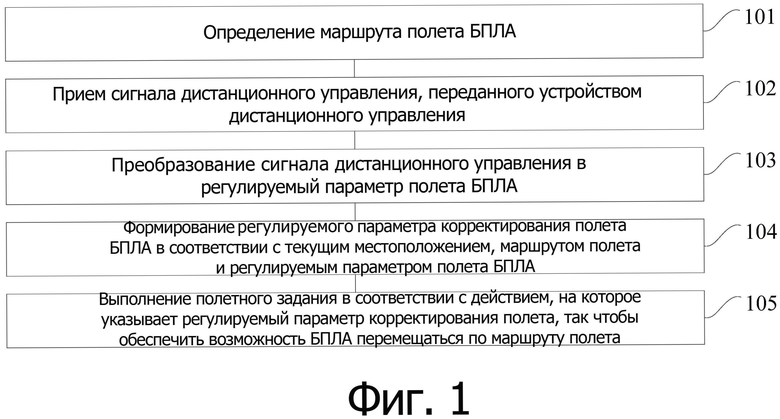
1. Способ управления полетом беспилотного летательного аппарата, БПЛА, характеризующийся тем, что
определяют (101) маршрут полета БПЛА;
принимают (102) сигнал дистанционного управления, переданный устройством дистанционного управления;
преобразуют (103) сигнал дистанционного управления в регулируемый параметр полета БПЛА;
формируют (104) регулируемый параметр корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА; и
выполняют (105) полетное задание в соответствии с действием, на которое указывает регулируемый параметр корректирования полета, так чтобы обеспечить возможность БПЛА перемещаться по указанному маршруту полета.
2. Способ по п. 1, в котором регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, и на указанном этапе формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и указанным регулируемым параметром полета БПЛА,
если указанный регулируемый параметр полета в поперечном направлении равен нулю, то определяют регулируемый параметр корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета; и
формируют регулируемый параметр корректирования полета в соответствии с указанным регулируемым параметром полета в продольном направлении и указанным регулируемым параметром корректирования в поперечном направлении, при этом указанный регулируемый параметр корректирования полета включает в себя величину скорости полета и направление полета.
3. Способ по п. 1, в котором указанный регулируемый параметр корректирования полета содержит величину скорости полета и направление полета, и указанный регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении;
при этом на указанном этапе выполнения полетного задания в соответствии с действием, на которое указывает указанный регулируемый параметр корректирования полета, так чтобы обеспечить возможность БПЛА перемещаться по маршруту полета,
выполняют перелет к маршруту полета в соответствии с указанной величиной скорости полета и указанным направлением полета; и
выполняют полетное задание вдоль маршрута полета в соответствии с действием, на которое указывает указанный регулируемый параметр полета в продольном направлении.
4. Способ по п. 1, в котором указанный регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, при этом
если указанные регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении равны нулю, оценивают (304), находится ли БПЛА на маршруте полета;
если результат оценки заключается в том, что БПЛА находится на маршруте полета, то выполняют зависание (305) на маршруте полета; а
если результат оценки заключается в том, что БПЛА не находится на маршруте полета, то выполняют перелет (306) к маршруту полета и зависание на маршруте полета.
5. Способ по п. 4, в котором при выполнении перелета к маршруту полета:
определяют расстояние между текущим местоположением БПЛА и маршрутом полета и
выполняют перелет к маршруту полета в соответствии с курсом, обозначенным указанным расстоянием.
6. Устройство управления полетом беспилотного летательного аппарата, БПЛА, содержащее процессор, при этом процессор выполнен с возможностью реализации следующих программных модулей, которые хранятся в памяти:
модуля (501) определения, выполненного с возможностью определения маршрута полета БПЛА;
модуля (502) приема, выполненного с возможностью приема сигнала дистанционного управления, переданного устройством дистанционного управления;
модуля (503) преобразования, выполненного с возможностью преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА;
модуля (504) формирования, выполненного с возможностью формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и регулируемым параметром полета БПЛА; и
модуля (505) исполнения, выполненного с возможностью выполнения полетного задания в соответствии с действием, на которое указывает регулируемый параметр корректирования полета, так чтобы обеспечить возможность БПЛА перемещаться по маршруту полета.
7. Устройство по п. 6, в котором регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, при этом
указанный модуль (504) формирования содержит:
подмодуль определения, выполненный с возможностью определения, когда регулируемый параметр полета в поперечном направлении равен нулю, регулируемого параметра корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета; и
подмодуль формирования, выполненный с возможностью формирования регулируемого параметра корректирования полета в соответствии с указанным регулируемым параметром полета в продольном направлении и указанным регулируемым параметром корректирования в поперечном направлении, при этом указанный регулируемый параметр корректирования полета включает в себя величину скорости полета и направление полета.
8. Устройство по п. 6, в котором указанный регулируемый параметр корректирования полета содержит величину скорости полета и направление полета, а указанный регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении; при этом
указанный модуль (505) исполнения содержит: первый подмодуль исполнения, выполненный с возможностью перелета к указанному маршруту полета в соответствии с указанной величиной скорости полета и указанным направлением полета; и
второй подмодуль исполнения, выполненный с возможностью выполнения полетного задания вдоль указанного маршрута полета в соответствии с действием, на которое указывает указанный регулируемый параметр полета в продольном направлении.
9. Устройство по п. 6, в котором указанный регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, при этом
указанный модуль (505) исполнения содержит:
подмодуль оценки, выполненный с возможностью оценивать, когда оба, регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, равны нулю, находится ли БПЛА на маршруте полета;
подмодуль зависания, выполненный с возможностью зависания на маршруте полета, если БПЛА перемещается по маршруту полета; и
подмодуль исполнения, выполненный с возможностью перелета к маршруту полета и зависания на маршруте полета, если БПЛА не перемещается по маршруту полета.
10. Устройство по п. 9, в котором подмодуль исполнения содержит:
элемент определения, выполненный с возможностью определения расстояния между текущим местоположением БПЛА и маршрутом полета; и
элемент перелета, выполненный с возможностью перелета к маршруту полета в соответствии с курсом, на который указывает указанное расстояние.
11. Беспилотный летательный аппарат, БПЛА, содержащий систему управления полетом, при этом указанная система (600) управления полетом содержит контроллер (601) полета, компонент (602) позиционирования и компонент (603) связи, при этом
компонент (603) связи выполнен с возможностью приема сигнала дистанционного управления, передаваемого устройством дистанционного управления, и передачи сигнала дистанционного управления в контроллер полета;
компонент (602) позиционирования выполнен с возможностью получения текущего местоположения БПЛА и передачи текущего местоположения БПЛА в контроллер полета; и
контроллер (601) полета выполнен с возможностью определения маршрута полета БПЛА, преобразования сигнала дистанционного управления в регулируемый параметр полета БПЛА, формирования регулируемого параметра корректирования полета БПЛА в соответствии с текущим местоположением, маршрутом полета и указанным регулируемым параметром полета БПЛА, и с возможностью управления БПЛА для выполнения полетного задания в соответствии с действием, на которое указывает указанный регулируемый параметр корректирования полета, так чтобы обеспечить возможность БПЛА перемещаться по маршруту полета.
12. БПЛА по п. 11, в котором регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, при этом
указанный контроллер (601) полета выполнен с возможностью, при формировании регулируемого параметра корректирования полета БПЛА, если регулируемый параметр полета в поперечном направлении равен нулю, определять регулируемый параметр корректирования в поперечном направлении в соответствии с текущим местоположением БПЛА и маршрутом полета, и формировать регулируемый параметр корректирования полета в соответствии с указанными регулируемым параметром полета в продольном направлении и регулируемым параметром корректирования в поперечном направлении, при этом указанный регулируемый параметр корректирования полета содержит величину скорости полета и направление полета.
13. БПЛА по п. 11, в котором указанный регулируемый параметр корректирования полета содержит величину скорости полета и направление полета, а указанный регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении; при этом
указанный контроллер (601) полета выполнен с возможностью, при управлении БПЛА для выполнения полетного задания в соответствии с действием, на которое указывает указанный регулируемый параметр корректирования полета, управления БПЛА для перелета к маршруту полета в соответствии с указанными величиной скорости полета и направлением полета, и управления БПЛА для выполнения полетного задания вдоль указанного маршрута полета в соответствии с действием, на которое указывает указанный регулируемый параметр полета в продольном направлении.
14. БПЛА по п. 11, в котором указанный регулируемый параметр полета содержит регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, при этом
указанный контроллер (601) полета выполнен с возможностью, при управлении БПЛА для выполнения полетного задания в соответствии с действием, на которое указывает указанный регулируемый параметр корректирования полета, выполнять оценку, если оба, регулируемый параметр полета в продольном направлении и регулируемый параметр полета в поперечном направлении, равны нулю, находится ли БПЛА на маршруте полета, и, если БПЛА перемещается по маршруту полета, то управлять так, чтобы БПЛА зависал на маршруте полета, а если БПЛА не перемещается по маршруту полета, то управлять так, чтобы БПЛА перелетел к маршруту полета и завис на маршруте полета.
15. БПЛА по п. 14, в котором контроллер (601) полета выполнен с возможностью, при управлении БПЛА для перелета к маршруту полета, определения расстояния между текущим местоположением БПЛА и маршрутом полета, и выполнения перелета к маршруту полета в соответствии с курсом, на который указывает указанное расстояние.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ СО ВСТРОЕННОЙ СИСТЕМОЙ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИЯХ | 2012 |
|
RU2597047C2 |
| CN 0104670496 B, 17.08.2016 | |||
| CN 0103149937 B, 21.10.2015. | |||

