Изобретение относится к локальным системам навигации, в части определения координат подвижного объекта относительно источника переменного вращающегося магнитного поля в открытом пространстве и в закрытых помещениях.
Известна система определения координат [Shuang Song, Chao Hu, Ваори Li, Xiaoxiao Li, Max Q.-H. Meng An Electro-magnetic localization and orientation method based on rotating magnetic dipole // IEEE Transactions on magnetics, Vol. 49, №3, march 2010. - P.974-977], содержащая источник переменного вращающегося магнитного поля, устройство определения начальных фаз и амплитуд индукции магнитного поля, а так же устройство синхронизации, осуществляющее синхронизацию датчика магнитного поля и источника магнитного поля по проводному каналу.
Недостатком данного устройства является ограничение по дальности действия в связи с применением проводного канала синхронизации.
Известно «Устройство для определения координат подвижного объекта с использованием магнитного поля» [патент RU2713456C1, МПК G01S 5/16, G01R 33/02, G01V 3/10, 22.03.2019], содержащее источник переменного вращающегося магнитного поля, устройство переключения режима работы источника магнитного поля, устройство определения начальных фаз и амплитуд индукции магнитного поля. Синхронизация фазы сигналов реализуется с помощью изменения режима работы источника магнитного поля, излучающего в пространстве попеременно то магнитное поле синхронизации, то магнитное поле навигации.
Недостатком данного устройства является низкая точность определения координат подвижного объекта из-за невысокой скорости переключения режимов работы источника переменного вращающегося магнитного поля, которая обусловлена высокой инерциальностью источника переменного вращающегося магнитного поля.
Наиболее близким по технической сущности является устройство (прототип) [Н. P. Kalmus, "A new guiding and tracking system," IRE Trans. Aerosp.Navigat. Electron., vol. 9, pp.7-10, 1962], содержащее источник переменного вращающегося магнитного поля и мобильную часть, состоящую из двух взаимно перпендикулярных датчиков магнитного поля, оси чувствительности которых расположены в плоскости источника магнитного поля.
Недостатком прототипа является то, что устройство работает только в той плоскости пространства, в которой расположен источник магнитного поля.
Техническим результатом изобретения является расширение области пространства для навигации всех подвижных объектов, находящихся в зоне действия переменного вращающегося магнитного поля, а также дополнительная возможность определения расстояния от объекта навигации до источника переменного вращающегося магнитного поля, и высоты объекта навигации над плоскостью размещения источника переменного вращающегося магнитного поля.
Технический результат достигается тем что, в устройство, содержащее наземный источник переменного вращающегося магнитного поля и мобильную часть в составе ортогонально размещенных двух датчиков магнитного поля, дополнительно введены третий и четвертый датчики магнитного поля, измеритель угла наклона, а так же последовательно соединенные блок аналого-цифрового преобразователя, блок обработки данных, блок управления, трехкоординатное устройство вращения и устройство позиционирования, на котором размещены первый, второй, третий, четвертый датчики магнитного поля и измеритель угла наклона, при этом третий датчик магнитного поля размещен взаимно ортогонально относительно первого и второго датчиков магнитного поля, а четвертый датчик магнитного поля размещен на заданном расстоянии от первого, при этом их оси чувствительности совпадают, кроме того, выходы первого, второго, третьего, четвертого датчиков магнитного поля и измерителя угла наклона соединены с первым, вторым, третьим, четвертым и пятым входом блока аналого-цифрового преобразователя соответственно.
Сущность изобретения заключается в расширении области пространства для навигации всех подвижных объектов, находящихся в зоне действия переменного вращающегося магнитного поля, за счет дополнительно введенных:
- датчиков магнитного поля, определяют величину индукции магнитного поля по осям ОХ и OZ;
- измерителя угла наклона, определяют угол отклонения устройства позиционирования от вертикали;
- блока обработки данных, вычисляют угол положения, высоту и расстояние подвижного объекта относительно источника переменного вращающегося магнитного поля.
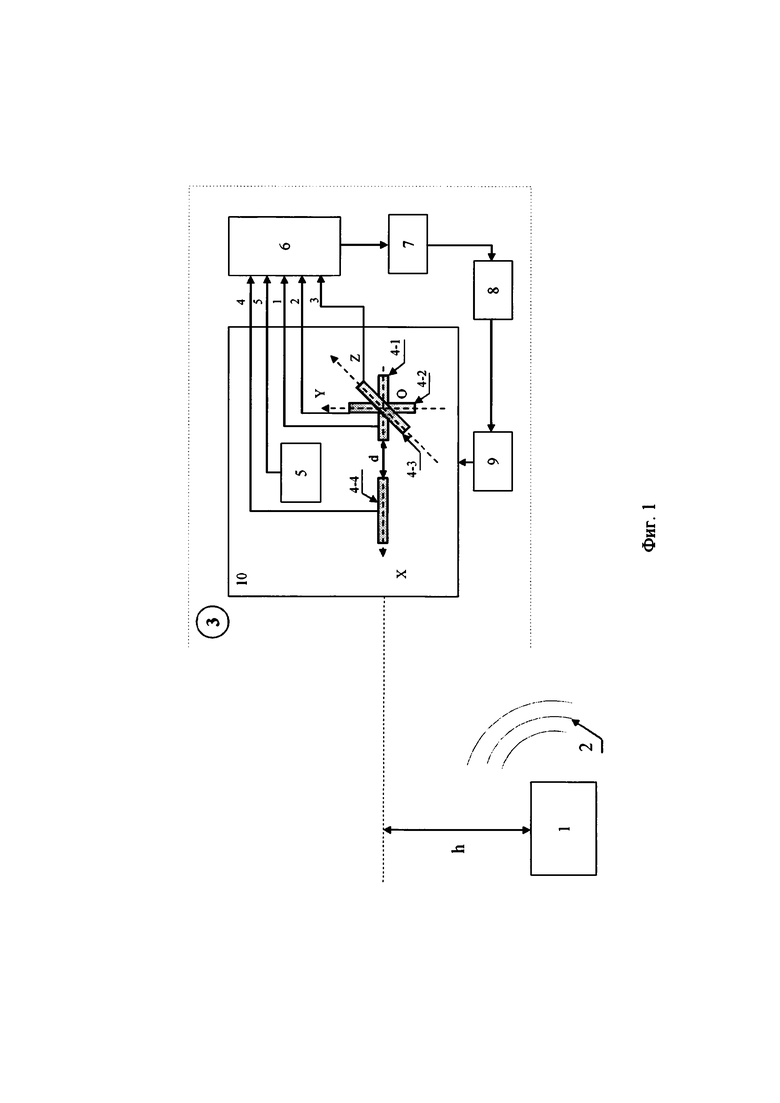
На фиг.1 представлена структурная схема устройства магнитометрического комплекса для навигации объектов в пространстве, где обозначены:
1 - источник переменного вращающегося магнитного поля;
2 - условное обозначение переменного вращающегося магнитного поля;
3 - мобильная часть;
4-1, 4-2, 4-3, 4-4 - датчики магнитного поля;
5 - измеритель угла наклона;
6 - блок аналого-цифрового преобразователя (АЦП);
7 - блок обработки данных;
8 - блок управления;
9 - трехкоординатное устройство вращения;
10 - устройство позиционирования.
Источник переменного вращающегося магнитного поля 1 создает переменное вращающееся магнитное поля 2. На устройстве позиционирования 10 расположены датчики магнитного поля 4-1, 4-2, 4-3, 4-4 и измеритель угла наклона 5. Датчики магнитного поля 4-1, 4-2, 4-3 расположены ортогонально относительно друг друга, выходы этих датчиков соединены с 1, 2 и 3 входом АЦП 6. Датчик магнитного поля 4-4 расположен соосно 4-1 датчику магнитного поля на расстоянии d, выход датчика соединен с 4 входом АЦП 6. Выход измерителя угла наклона 5 соединен с 5 входом АЦП 6. АЦП 6, блок обработки данных 7, блок управления 8, трехкоординатное устройство вращения 9 и устройство позиционирования 10 соединены последовательно.
Устройство работает следующим образом.
На земной поверхности на горизонтальной плоскости располагают источник переменного вращающегося магнитного поля 1. Мобильная часть 3 находится в зоне действия переменного вращающегося магнитного поля 2. На мобильной части 3 размещают устройство позиционирования 10, в котором располагают три взаимно ортогональных датчика магнитного поля, четвертый датчик магнитного поля размещают соосно с первым на заданном расстоянии d. Кроме того, в устройстве позиционирования 10 располагают измеритель угла наклона, который измеряет угол отклонения устройства позиционирования 10 от вертикали.
Источник переменного магнитного поля 1 создает переменное вращающиеся магнитное поля 2. Датчики магнитного поля 4-1, 4-2, 4-3 и 4-4 измеряют три компоненты индукции навигационного поля вдоль осей OX, OY, OZ, причем ось OY ориентирована вертикально относительно положения мобильной части. Измеритель угла наклона 5 измеряет угол отклонения от вертикали устройства позиционирования 10. Аналоговые сигналы с датчиков поступают на входы аналого-цифрового преобразователя 6 и после преобразования в цифровом виде в блок обработки данных 7.
В блоке обработки данных 7 вычисляют: величину магнитной индукции магнитного поля по осям OX, OY, OZ, расстояние, угол положения и высоту объекта над плоскостью источника переменного вращающегося магнитного поля 1. На основе полученных данных формируют управляющие команды для блока управления 8.
Блок управления 8 на основе управляющих команд формирует управляющие импульсы для трехкоординатного устройства вращения 9.
Трехкоординатное устройство вращения 9, в соответствии с управляющими импульсами с блока управления 8, поворачивается вокруг осей OX, OY, OZ.
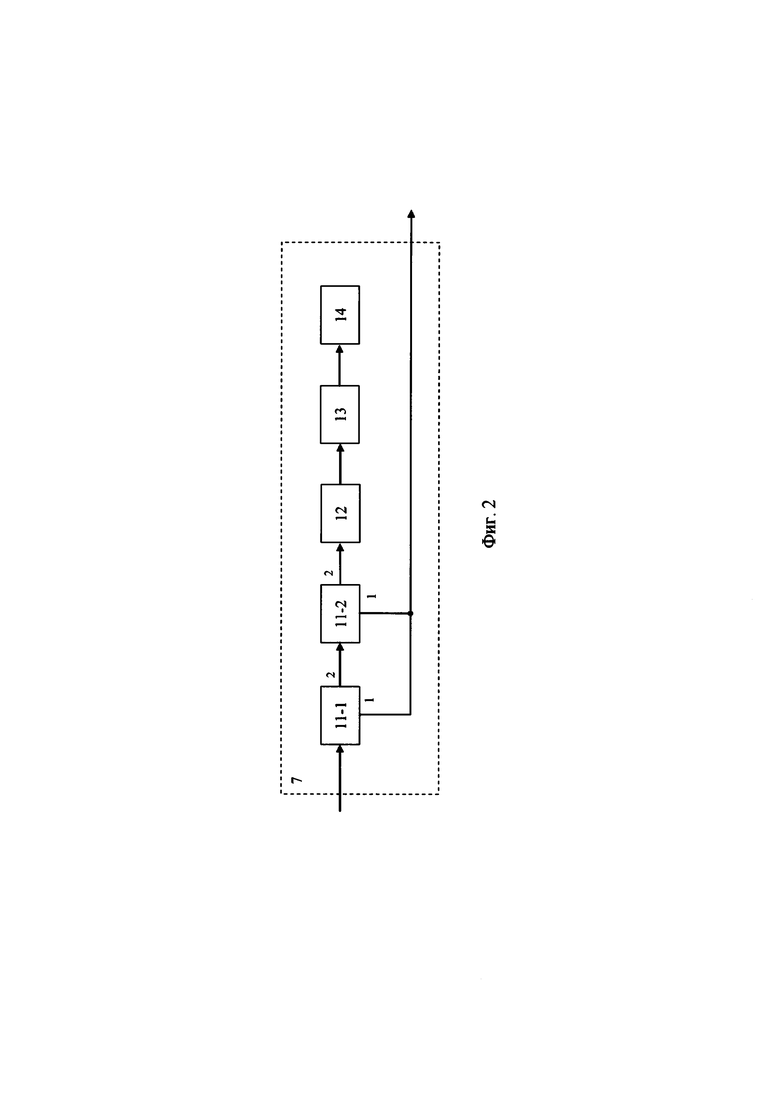
Структурная схема блока обработки данных 7 приведена на фиг.2, где обозначены:
11-1, 11-2 - блоки вычисления величины магнитной индукции;
12 - блок вычисления угла от вертикали;
13 - блок определения положения;
14 - устройство вывода информации.
Навигационная информация поступает на блок вычисления вектора магнитной индукции 11-1, в котором вычисляют величину индукции магнитного поля вдоль оси OY в соответствии с выражением:

где М - магнитный момент источника переменного вращающегося магнитного поля, μ0 - магнитная постоянная, r - расстояние до источника переменного вращающегося магнитного поля.
Если индукция магнитного поля вдоль оси OY не равна нулю, то с первого выхода блока вычисления вектора магнитной индукции 11-1 поступает команда на вращение в блок управления 8, при этом вычисления производятся заново. Если величина индукции магнитного поля равна нулю, вращение прекращают, а навигационная информация через второй выход блока вычисления вектора магнитной индукции 11-1 поступает на блок вычисления магнитной индукции 11-2.
В блоке вычисления магнитной индукции 11-2 вычисляют величину индукции магнитного поля вдоль осей OZ и ОХ, подавая сигналы блоку управления 8 на вращение вокруг оси OY через первый выход до тех пор, пока разность фаз между осями OZ и ОХ не будет равна 90°, вычисляют величину индукции магнитного поля В03 третьего 4-3 и В04 четверного 4-4 датчиков магнитного поля, сравнивают их, и если В03 больше В04, через первый выход отправляют сигнал на устройство вращения 9 на поворот устройства позиционирования 10 на 180°, если В03 меньше В04, навигационная информация через второй выход поступает на блок вычисления угла от вертикали 12. В блоке вычисления угла отклонения от вертикали 12, фиксируют угол отклонения оси OY от вертикали. В блоке определения положения 13, рассчитывают угол положения θ, расстояние r от источника переменного вращающегося магнитного поля до объекта навигации, высоту h подвижного объекта относительно поверхности земли, после чего результаты передают в устройство вывода информации 14.
Угол положения θ устройства позиционирования 10 относительно плоскости источника переменного вращающегося магнитного поля 1, определяющий направление на источник переменного вращающегося магнитного поля, вычисляют в соответствии с выражением:

где β - отклонение по вертикали.
Расстояние r от источника переменного вращающегося магнитного поля до центра первого магнитного датчика [Голев И.М., Заенцева Т.И., Угрюмов Р.Б., Желонкин М.В., Попов АС. Расчет характеристик источника магнитного поля для магнитометрической системы позиционирования беспилотного летательного аппарата // Научный информационный сборник «ТРАНСПОРТ: наука, техника, управление» 2020, №8, С.51-57] вычисляют в соответствии с выражением:
где М - магнитный момент источника переменного вращающегося магнитного поля, μ0 - магнитная постоянная, В01 - величина магнитной индукции первого датчика магнитного поля, θ - угол положения устройства позиционирования 10 относительно плоскости источника магнитного поля 1.
Высоту h подвижного объекта относительно источника переменного вращающегося магнитного поля вычисляют в соответствии с выражением:

Датчики магнитного поля 4-1, 4-2, 4-3 и 4-4 предназначены для измерения индукции переменного вращающегося магнитного поля, они преобразуют переменное вращающееся магнитное поле в гармоническое напряжение, с частотой равной частоте переменного вращающегося магнитного поля, могут быть изготовлены на основе феррозондовых магнитометров DRV425 [https://www.directindustry.com.ru/prod/texas-instruments-semiconductor/product-33647-2210533.html].
Измеритель угла наклона 8 предназначен для изменения угла наклона β мобильной части 3 относительно вертикали, может быть выполнен в виде микросхемы MPU6050 [https://3d-diy.ru/wiki/arduino-datchiki/giroskop-i-akselerometr-gy521-mpu6050/].
Блок аналого-цифрового преобразователя 6 предназначен для преобразования гармонического сигнала в цифровой вид, может быть выполнен в виде микросхемы AD7606 [https://www.analog.com/media/en/ technical-documentation/data-sheets/ad7606bbchips.pdf].
Блок обработки данных 7 предназначен для вычисления параметров индукции магнитного поля, высоты, угла отклонения устройства позиционирования от вертикали, расстояния до источника переменного вращающегося магнитного поля, а также формирования сигналов для блока управления 8, может быть выполнен в виде микрокомпьютера Jetson Nano [https://www.nvidia.com/ru-ru/autonomous-machines/embedded-systems/jetsin-nano].
Блок управления 8 предназначен для формирования управляющих импульсов для трехкоординатного устройства вращения 9, может быть выполнен в виде одноплатного компьютера Raspberry Pi 4 Model В [https://amperka.ru/product/raspberry-pi-4-model-b-4-gb] с платой расширения АЦП/ЦАП для Raspberry Pi (AD/DA) [https://miniboard.com.ua/platy-rasshireniya/184-acpcap-plata-rasshireniya-dlya-raspberry-pi-adda.html].
Трехкоординатное устройство вращения 9 предназначено для ориентации устройства позиционирования 10 в трехмерном пространстве, может быть реализовано с помощью трех сервоприводов MG995 [https://3d-diy.ru/wiki/arduino-mechanics/servo-mg995/].
Устройство позиционирования 10 представляет собой платформу, на которой размещают четыре датчика магнитного поля и измеритель угла наклона.
Таким образом, данное изобретение позволит расширить область навигации подвижных объектов, находящихся в зоне действия переменного вращающегося магнитного поля и определить расстояние от объекта навигации до источника переменного вращающегося магнитного поля, также и высоту подвижного объекта над местом установки источника переменного вращающегося магнитного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2024 |
|
RU2824864C1 |
| СПОСОБ И СИСТЕМА МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2776319C1 |
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2789733C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ВРАЩАЮЩЕГОСЯ ДИПОЛЬНОГО МАГНИТНОГО ПОЛЯ | 2022 |
|
RU2789734C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НИЗКОЧАСТОТНОГО НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ | 2024 |
|
RU2829941C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОДВИЖНЫХ ОБЪЕКТОВ | 1995 |
|
RU2104554C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
Изобретение относится к локальным системам навигации, в частности к устройствам для определения координат подвижного объекта относительно источника переменного вращающегося магнитного поля в открытом пространстве и в закрытых помещениях. Техническим результатом является расширение области навигации подвижных объектов, находящихся в зоне действия переменного вращающегося магнитного поля, и определение расстояния от объекта навигации до источника переменного вращающегося магнитного поля, а также высоты подвижного объекта над местом установки источника переменного вращающегося магнитного поля. Заявленный магнитометрический комплекс для навигации объектов в пространстве, дополнительно содержит датчики магнитного поля, которые определяют величину индукции магнитного поля по осям ОХ и OZ, измерители угла наклона, определяющие угол отклонения устройства позиционирования от вертикали, и блок обработки данных, вычисляющий угол положения, высоту и расстояние подвижного объекта относительно источника переменного вращающегося магнитного поля. 2 ил.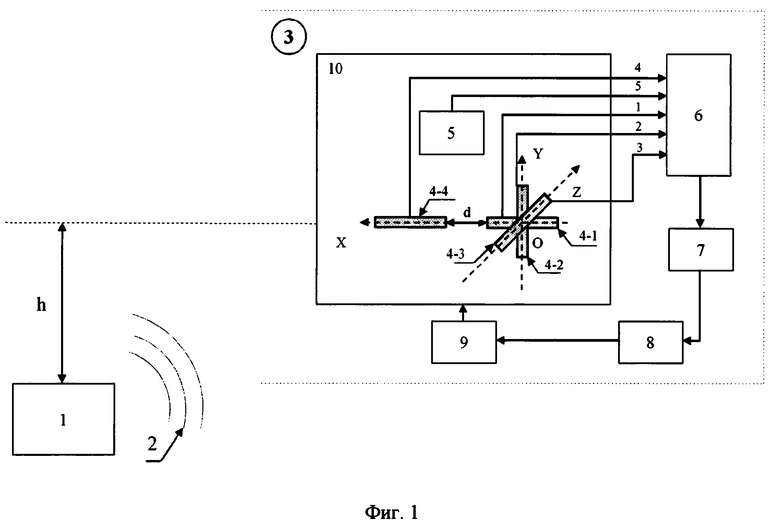
Магнитометрический комплекс для навигации объектов в пространстве, содержащий наземный источник переменного вращающегося магнитного поля и мобильную часть в составе ортогонально размещенных первого и второго датчиков магнитного поля, отличающийся тем, что дополнительно введены третий и четвертый датчики магнитного поля, измеритель угла наклона, а также последовательно соединенные блок аналого-цифрового преобразователя, блок обработки данных, блок управления, трехкоординатное устройство вращения и устройство позиционирования, на котором размещены первый, второй, третий, четвертый датчики магнитного поля и измеритель угла наклона, при этом третий датчик магнитного поля размещен взаимно ортогонально относительно первого и второго датчиков магнитного поля, а четвертый датчик магнитного поля размещен на заданном расстоянии от первого, при этом их оси чувствительности совпадают, кроме того, выходы первого, второго, третьего, четвертого датчиков магнитного поля и измерителя угла наклона соединены с первым, вторым, третьим, четвертым и пятым входом блока аналого-цифрового преобразователя соответственно.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО ПОЛЯ | 2019 |
|
RU2713456C1 |
| KALMUS H.P | |||
| A New Guiding and Tracking System // IRE Transactions on Aerospace and Navigational Electronics, vol | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2013 |
|
RU2542793C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| US 5467084 A, 14.11.1995 | |||
| CN | |||

