Изобретение относится к области охранных систем видеонаблюдения участков местности, прилегающих к территории охраняемого объекта с внешней и внутренней стороны периметра ограждения. При осуществлении изобретения можно получить практически полный контроль над охраняемым объектом, путем наблюдения объекта без мертвых зон с высокой скоростью реагирования на происходящие события в режиме реального времени, повысить при этом эффективность оперативной работы операторов.
Известна передвижная камера «Camera support with continuous rolling strip» [1], которая содержит: дорожку и тележку, выполненную с возможностью качения тележки вдоль дорожки на роликах, тележка при этом содержит корпус, поддерживаемый несколькими разнесенными роликами, сами ролики снабжены подшипниками, а один из роликов имеет датчик угла поворота, дорожка содержит жесткую несущую раму, изготовленную из нескольких секций, соединенных между собой, некоторые участки дорожки имеют кривизну, дорожка содержит штрихкод непрерывного датчика угла поворота; непрерывную полосу прокатки, которая прикреплена к части несущей рамы, вдоль которой движутся ролики тележки; опорный кронштейн, который находится под тележкой, при этом длина кронштейна регулируется; устройство коррекции положения, содержащее одноосное устройство коррекции положения, и в котором голова камеры имеет многоосевую головку панорамирования; держатель камеры с одиночной степенью свободы поперечной продольному направлению дорожки; при этом на дорожке может находиться две или более тележки, а дорожка имеет штриховой код, содержащий не повторяющийся шаблон, расположенный напротив датчика каждой из упомянутых тележек, перемещение тележки определяется конечными положениями, характеризующимися уникальными точками штрихового кода, и в которых конечные точки для каждого диапазона движения тележки представляют собой заданное расстояние от одного или нескольких абсолютных, мгновенных положений на дорожке.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, принятого за прототип, относится то, что известное устройство затруднительно использовать на открытых пространствах в условиях прямого воздействия различного рода природных факторов, также отсутствует возможность быстрого реагирования при возникновении ситуаций, связанных с попытками проникновения на охраняемый объект или с попытками порчи элементов охранной системы.
Сущность изобретения заключается в создании системы охраны с подвижным модулем видеонаблюдения и силового реагирования, конструкция которой позволяет:
- производить видеонаблюдение без мертвых зон, минимальным числом камер (в некоторых случаях практически одной) путем постоянного их перемещения;
- оперативно определять «ложное» и «неложное» срабатывание датчиков охранной системы путем оперативного перемещения камеры к сработавшему датчику;
- прерывать попытки проникновения на охраняемый объект или порчи элементов конструкции охранной системы путем силового воздействия на злоумышленника;
- устойчиво работать в широком диапазоне температуры окружающей среды;
- устойчиво работать при неблагоприятных погодных условиях.
Техническим результатом при решении данной задачи является получение практически полного контроля над охраняемым объектом, путем обеспечения наблюдения объекта без мертвых зон с высокой скоростью реагирования на происходящие события в режиме реального времени, в повышении надежности предлагаемого изобретения за счет стойкости к воздействию различных атмосферных и погодных явлений. Помимо получения технического результата, экономятся затраты на монтаж и эксплуатацию технических средств таких, как стационарных камер видеонаблюдения, осветительных приборов, датчиков различного назначения.
Такое решение обеспечивается системой охраны с подвижным модулем видеонаблюдения и силового реагирования, содержащей дорожку и тележку, выполненную с возможностью качения тележки вдоль дорожки на роликах с подшипниками, поддерживающих корпус тележки, при этом дорожка имеет жесткую несущую раму, изготовленную из нескольких секций, соединенных между собой, полосу прокатки, которая закреплена на несущей раме, и вдоль которой движутся ролики тележки, дорожка при этом содержит информационную кодовую полосу в виде штрихкода, а тележка содержит детектор, расположенный напротив штрихкода, снизу корпуса тележки на кронштейне закреплена камера с возможностью поворота в горизонтальной плоскости и перемещения в вертикальной плоскости, новым в заявленной системе охраны с подвижным модулем видеонаблюдения и силового реагирования является то, что каждая секция несущей рамы дорожки выполнена из балки в виде стального гнутого незамкнутого профиля, а полоса прокатки выполнена в виде закрепленных на балке рельсовых направляющих, профиль балки равнобедренный треугольник, сверху балки на ее краях жестко закреплен дугообразный металлический профиль, при этом балка имеет предварительное продольное напряжение, созданное резьбовыми элементами, жестко закрепленными к балке и изогнутым металлическим профилем, с которым резьбовые элементы соединены гайками, рельсовые направляющие представляют собой «с»-образный металлический профиль с перфорацией вдоль профиля прямоугольными отверстиями, которые образуют информационную полосу, соединение рельсовых направляющих соседних секций выполнено с чередованием токопроводящих и нетокопроводящих стыков, внутрь несущей балки помещена диэлектрическая вставка, профиль поперечного сечения которой аналогичен профилю несущей балки, на боковых поверхностях внутренней стороны диэлектрической вставки, помещенной в несущую балку, закреплены полосовые проводники, которые совместно с несущей балкой образуют несимметричную полосковую линию передачи и приема сигналов, при этом соединенные секции образуют протяженную конструкцию, закрепленную к кронштейнам консольного типа, которые нижней своей частью опираются на опоры, ролики тележки относительно рельсовой направляющей расположены сверху и снизу, причем верхние ролики тележки ведущие, а нижние - поддерживающие, сами ведущие ролики выполнены в виде мотор - колеса, имеющего вентиляционный канал, причем отверстия в статоре имеют переменное сечение, а отверстия второй щеки закрыты эластичными клапанами, внутри корпуса тележки, в нижней боковой его части между поддерживающими роликами закреплен тормозной блок, который состоит из линейного электродвигателя и тормозящего элемента, при этом ротор (бегун) линейного электродвигателя выполнен в виде клина, профилем которого является треугольник со сторонами а, b и с, на скошенной поверхности ротора выполнены пазы, в которые уложены цилиндрические ролики с возможностью свободно вращаться по поверхностям качения, тормозящий элемент состоит из колодки, имеющей профиль, аналогичный профилю ротора, с закрепленным на ней прямоугольным бруском, выполненным из материала с высоким коэффициентом трения, контакт между ротором и колодкой осуществлен по скошенным поверхностям через ролики, вдоль всей конструкции на кронштейнах закреплена контактная сеть, состоящая из контактного провода, диэлектрической подкладки и диэлектрического защитного короба, через определенные промежутки на контактной сети выполнены температурные компенсаторы теплового удлинения (сокращения) контактного провода, состоящие из компенсаторного герметичного сильфона, роликового блока и диэлектрической вставки, сильфон заполняется газом плотностью р, а его размеры и внутреннее давление газа определяются величиной коэффициента температурного расширения k для данного провода, а к корпусу тележки закреплен токосъемник, который снабжен съемным поддоном с жалюзи, в нижней части корпуса тележки вдоль центральной продольной оси размещен приборный отсек, в боковых окнах которого установлены с возможностью перемещения индукционные датчики приема - передачи сигналов, верхняя часть корпуса приборного отсека имеет профиль поперечного сечения аналогичный несущей балки, а при установке тележки на рельсовые направляющие, корпус приборного отсека находится с зазором 2×δ между внутренними боковыми поверхностями диэлектрической вставки и наружными боковыми скошенными стенками приборного отсека, каждый индукционный датчик приема - передачи сигналов имеет регулятор зазора δ1 между полосовым проводником и приемной поверхностью индукционного датчика, при этом регулятор зазора δ1 выполнен на линейном электродвигателе, ротор (бегун) которого имеет наружную криволинейную поверхность, на которую через ролики опираются толкатели, удерживаемые индивидуальными направляющими и соединенные с внутренней стороной индукционного датчика, сам датчик закреплен на направляющих, удерживаемых пружинами внутри боковой части корпуса тележки напротив центральной продольной оси рельсовой направляющей закреплен оптический датчик, излучатель которого закреплен на корпусе тележки с противоположной стороны относительно рельсовой направляющей, в одной плоскости с камерой в нижней части тележки дополнительно установлено устройство силового реагирования, перемещение которого в горизонтальной и вертикальных плоскостях синхронизировано с перемещением камеры в этих плоскостях, при этом устройство силового реагирования может быть выполнено в виде нелетального или летального средства воздействия.
При исследовании отличительных признаков описываемой системы охраны с подвижным модулем видеонаблюдения и силового реагирования не выявлено каких-либо аналогичных известных решений, касающихся подвижных модулей в охранных системах, функционирующих на открытых участках местности и на которых установлены видеокамера и устройство силового реагирования.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволили установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует условию «новизна».
Для проверки соответствия заявленного изобретения условию "изобретательский уровень" заявитель провел дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипа признаками заявленного изобретения. Результаты поиска показали, что заявленное изобретение не вытекает для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований для достижения технического результата. В частности, заявленным изобретением не предусматриваются следующие преобразования:
- дополнение известного средства какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- замена какой-либо части известного средства другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такой замены;
- увеличение количества однотипных элементов действий, для усиления технического результата, обусловленного наличием в средстве именно таких элементов действий;
- выполнение известного средства или его части из известного материала для достижения технического результата, обусловленного известными свойствами этого материала;
- создание средства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, рекомендаций, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого средства и связей между ними.
Описываемое изобретение не основано на изменении количественного признака, представлении таких признаков во взаимосвязи, либо изменении ее вида.
Следовательно, заявленное изобретение соответствует условию "изобретательский уровень".
Перечень фигур.
На чертежах представлено
1) Пример осуществления изобретения.
2) Вид одной секции с тележкой.
3) Общий вид тележки.
4) Конструкция ведущих роликов.
5) Конструкция тормозного блока.
6) Устройство контактной сети и токосъемника.
7) Линия приема - передачи сигналов и расположение датчиков относительно полосовых проводников.
8) Принцип регулировки положения индукционного датчика.
9) График профиля криволинейной поверхности, по которой движется ролик.
10) Диаграмма состояний.
Сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, заключаются в следующем.
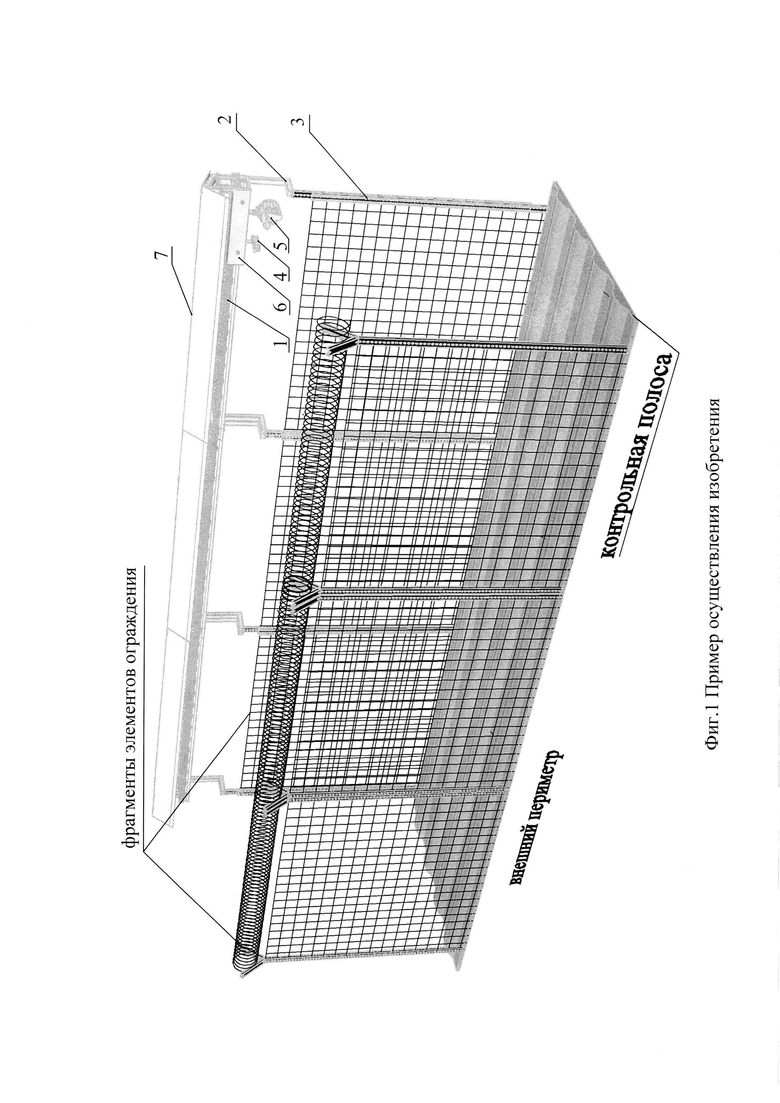
На фиг. 1 изображен пример осуществления изобретения. Секция (1) монтируется на элементах ограждения, кронштейн консольного типа (2) нижней своей частью жестко крепится к столбу (3), камера (4) и устройство силового реагирования (5) смонтированы на тележке (6), элементы конструкции защищены козырьком (7). Тележка (6) с камерой (4), устройством силового реагирования (5) и другими элементами, описанными ниже, представляет собой подвижный модуль. На фиг. 1 в качестве примера камеры (4) показана камера видеонаблюдения, а в качестве примера устройства силового реагирования (5) показан гранатомет. Размеры кронштейна (2) выбираются из расчета наилучшей обзорности для камеры (4) и оптимальности стрельбы устройством силового реагирования (5) по баллистической траектории, например, гранатами с раздражающим наполнителем. При соединении секций между собой формируется протяженная рамная конструкция, линейный размер которой определяется заданной длиной пути для тележки (6), при этом к кронштейну (2) крепятся две соседние секции. Особенностью системы является то, что для ее монтажа используются уже существующие элементы ограждения, например, такие, как столбы (3).
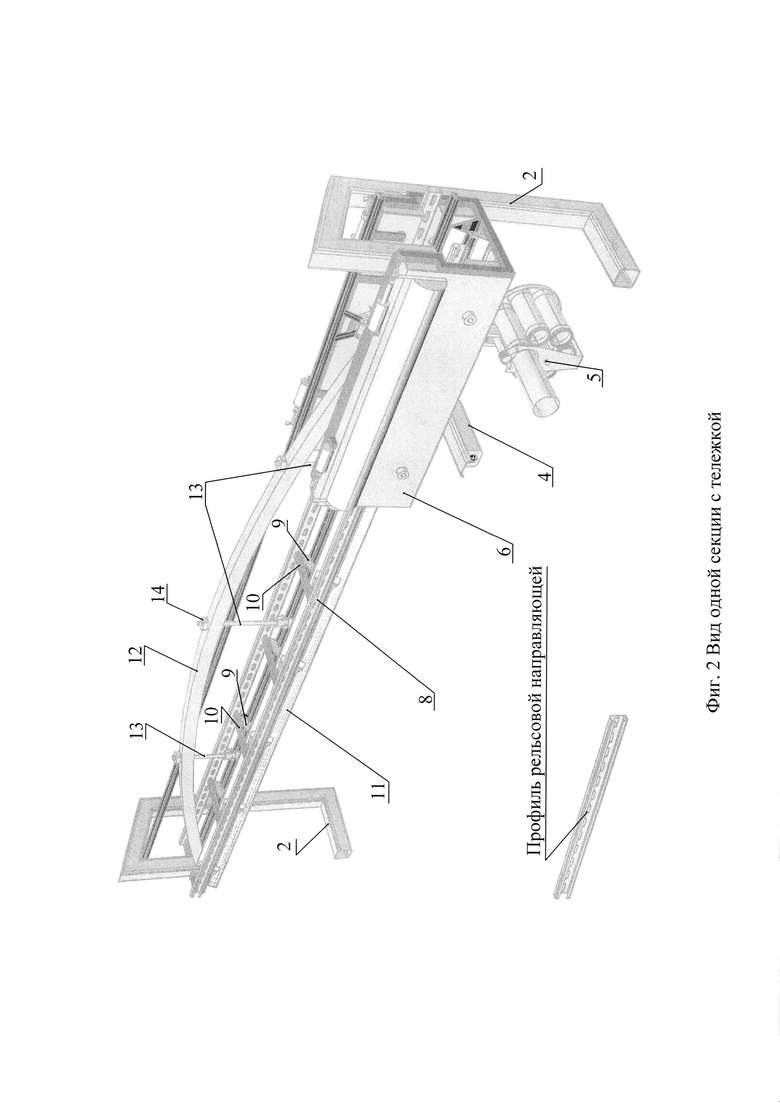
На фиг. 2 изображен вид одной секции с тележкой. Тележка (6) установлена на рельсовых направляющих (8) с возможностью перемещения вдоль них, рельсовые направляющие (8) через опоры (9) и поперечные соединители (10) опираются на несущую балку (11), при этом соединение рельсовых направляющих с поперечными соединителями не токопроводящее, несущая балка (11) своей верхней частью скреплена с кронштейном (2). На концах несущей балки (11) жестко закреплен дугообразный металлический профиль (12), выполненный, например, из тонкостенной квадратной трубы, к верней части несущей балки (11) (к ее верхнему ребру) жестко закреплены резьбовые элементы (13), которые гайками (14) стягивают балку (11) и профиль (12) в вертикальной плоскости, создавая предварительное продольное напряжение в несущей балке (11). Особенностью конструкции является возможность создания предварительного напряжения в несущей балке (11), которое необходимо для максимального облегчения ее веса с сохранением определенной жесткости (например, использование при ее изготовлении листового металла минимально возможной толщины). Профиль рельсовых направляющих (8) «с» - образный, имеющий продольную перфорацию. Перфорированные прямоугольные отверстия имеют одинаковый размер, форму и шаг, которая используется в качестве информационной кодовой полосы для позиционирования тележки (6) и определения ее положения на охраняемом периметре (см. описание ниже).
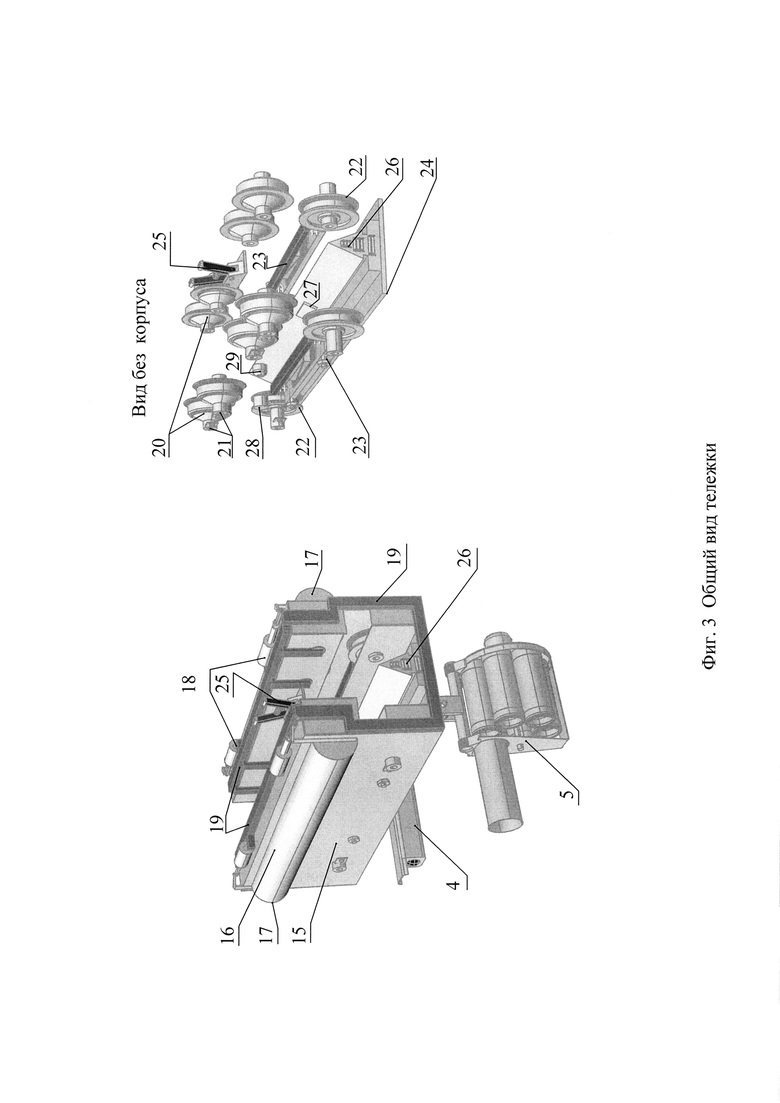
На фиг. 3 представлен общий вид тележки (6). На несущем корпусе (15) смонтированы: воздухозаборники (16) с заслонками (17) и регуляторами (18); кабельные короба (19); ведущие верхние ролики (20), которые выполнены в виде мотор - колес, втулки (21) которых жестко закреплены на корпусе (15); нижние поддерживающие ролики (22), также с жестко закрепленными втулками (21); тормозные блоки (23); площадка (24); токосъемник (25). На площадке (24) закреплен корпус приборного отсека (26), камера (4) и устройство силового реагирования (5), на боковых стенках приборного отсека (26) в окнах установлены индукционные датчики (27).
Заслонки (17) при помощи регуляторов (18) увеличивают или уменьшают объемы поступающего в воздухозаборники воздуха, необходимого для охлаждения обмоток мотор - колес (20), в зависимости от условий эксплуатации возможна установка в воздухозаборники вентиляторов для принудительного охлаждения. В кабельных коробах (19) уложены электропровода для питания мотор - колес (20), регуляторов (18), тормозных блоков (23). Тормозные блоки (23) размещены таким образом, при котором усилие торможения передается на нижнюю поверхность рельсовых направляющих (8) (фиг. 2), это позволяет ведущим роликам (20) при торможении оставаться в контакте с поверхностью рельсовых направляющих (8) по которой они прокатываются. Поддерживающие ролики (22) обеспечивают устойчивость тележки. Схема расположения ведущих (20) и поддерживающих (22) роликов, показанных на фиг. 3 выбрана для возможности исполнения тележки (6) сочлененной из двух и более частей при условии, что рельсовые направляющие в плане будут иметь определенную кривизну, также такое расположение придает устойчивости тележки (6) при работе устройства силового реагирования (5). Корпус приборного отсека (26) при движении тележки (6) большей своей частью находится внутри несущей балки (11), что придает ему дополнительную защиту. В корпусе приборного отсека (26) размещены: электронные блоки систем управления частотой вращения мотор - колес (20); устройства, управляющие тормозными блоками (23); устройства, управляющие регуляторами (18); блоки управления поворотами камеры (4) и устройства силового реагирования (5); система передачи сигналов видеоизображения камеры (4) и телеметрии; устройства, принимающие сигналы управления и др. Принцип действия и работа элементов управления, электронных блоков и систем управления известна из соответствующего уровня техники и в данном описании не приводится. Индукционные датчики (27) предназначены для приема сигналов управления и передачи сигналов видеоизображения и сигналов телеметрии.
Внутри корпуса (15) напротив центральной продольной оси рельсовой направляющей (8) (напротив перфорированных отверстий) установлен оптический датчик (28) с излучателем (29), который генерирует световой поток, принимаемый оптическим датчиком (28). Периодическая смена при движении тележки (6) проницаемой для светового потока среды (перфорированное отверстие) и непроницаемой среды (промежуток между двумя соседними перфорированными отверстиями), преобразуется датчиком (28) в импульсную последовательность (чередование наличия электрических сигналов и в их отсутствие в текущем интервале времени: если напротив оптического датчика перфорированное отверстие - «есть сигнал», если промежуток между отверстиями - «нет сигнала»). Формируемая импульсная последовательность обрабатывается в автоматическом режиме, а результатом является позиционирование тележки (6) или определение ее местонахождения.
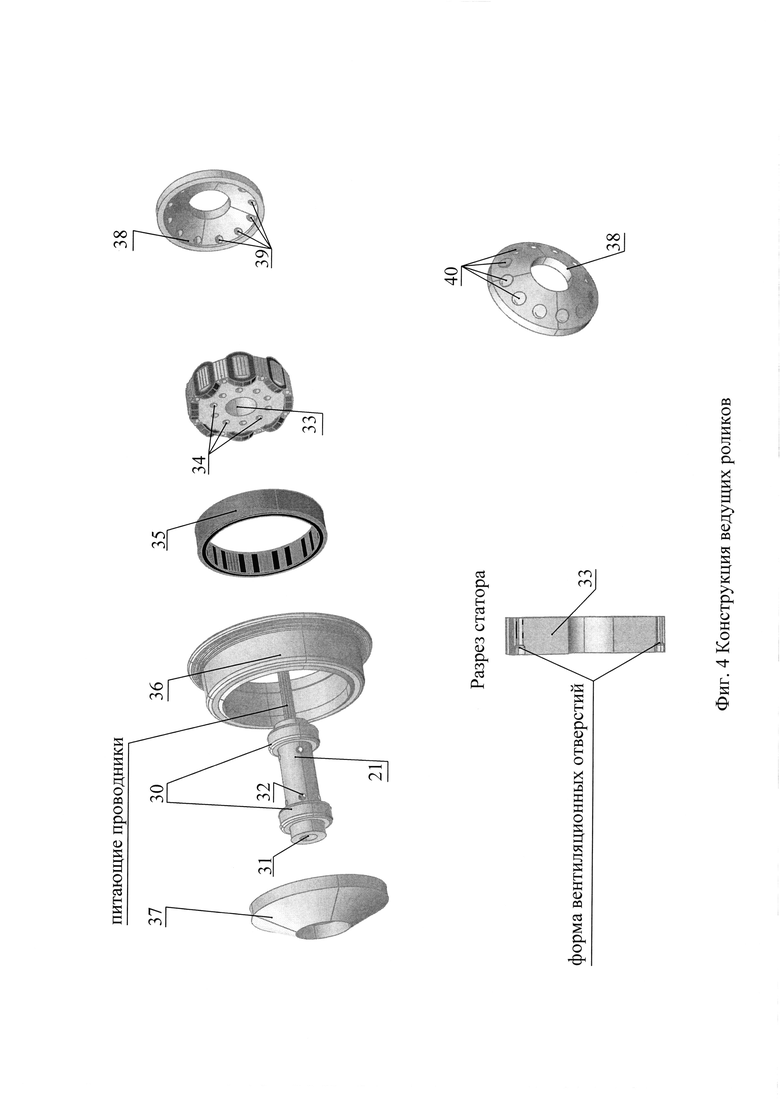
На фиг. 4 представлена конструкция ведущих роликов (20). Ведущий ролик выполнен в виде мотор - колеса переменного тока с короткозамкнутым ротором. На опорной втулке (21) посажены подшипники (30), при этом втулка имеет одно сквозное продольное отверстие (31) и несколько отверстий (32), выполненных через цилиндрическую поверхность втулки (21), по центру втулки жестко посажен статор (33) с вентиляционными отверстиями (34), ротор (35) с короткозамкнутой обмоткой жестко посажен на бандаж (36), который, в свою очередь, жестко, но с возможностью разборки соединен с опорными щеками (37) и (38), сами щеки (37) и (38) посажены на подшипники (30), на щеке (38) выполнены отверстия (39), закрытые эластичными клапанами (40). Выбор мотор - колеса переменного тока с короткозамкнутым ротором обусловлен отсутствием искрения, создающего дополнительные помехи при вращении ротора, а также с целью снижения веса тележки (6) и экономии монтажного пространства в корпусе (15) за счет отсутствия передаточных редукторов. Особенностью конструкции ведущих роликов (20) является канал воздушного охлаждения статора, проходящий через отверстия (31) и (32) опорной втулки, через первую внутреннюю полость, образованной щекой (37), через зазор между статором (33) и ротором (35), через отверстия (34), вторую внутреннюю полость образованной щекой (38) и через отверстия (39). Эластичные клапана (40) являются регуляторами воздушного потока, при малых скоростях потока они приоткрыты, при больших скоростях открыты больше (на положение эластичных клапанов влияет и положение заслонок (17) (фиг. 3)), отверстия (34) выполнены переменного сечения с целью увеличения скорости воздушного потока, проходящего через них. При изменении сечения отверстия с большего на меньшее, скорость потока воздуха увеличивается в меньшем сечении [2], и тем самым обдув стенок отверстия становится более интенсивным, что сказывается на эффективности охлаждения статора (33). Охлаждение таким способом выбрано по причине поддержания необходимого температурного режима внутренних слоев обмоток статора (33).
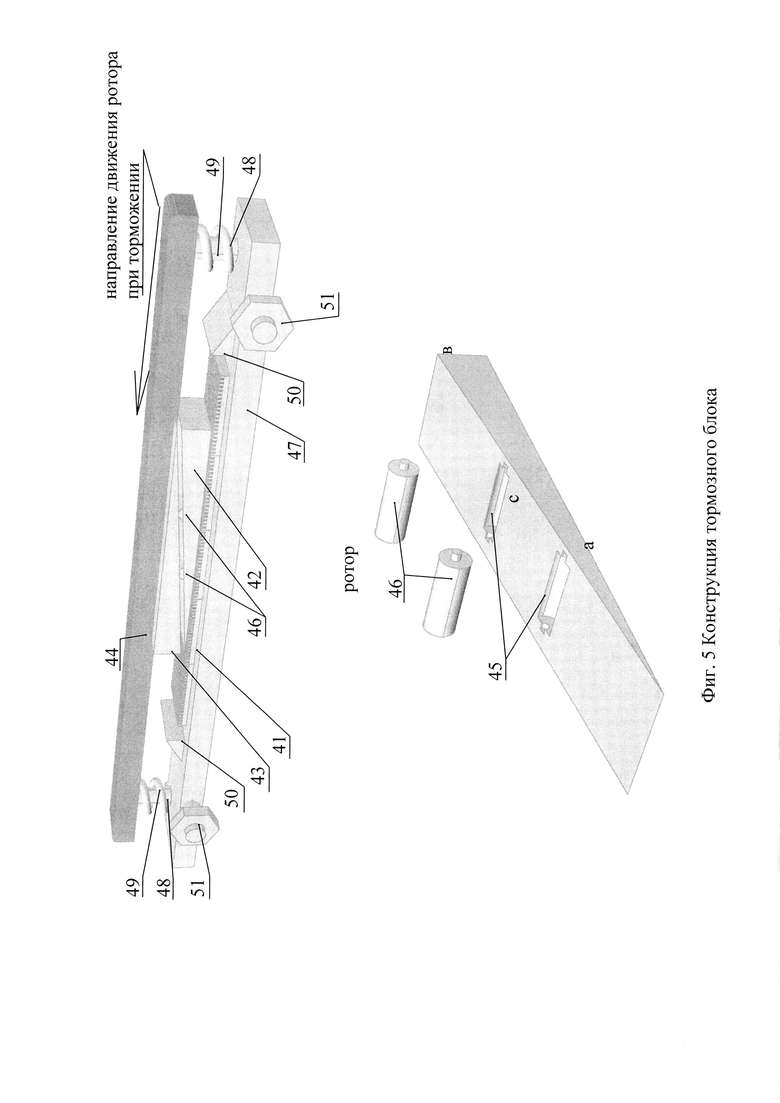
На фиг. 5 приведена конструкция тормозного блока (23), в основу которого положен принцип работы линейного электродвигателя. Тормозной блок (23) состоит: из статора (41); ротора (бегуна) (42); колодки (43) и накладки (44). Колодка (43) и накладка (44) составляют тормозящий элемент. Ротор (бегун) (42) выполнен в виде клина, профилем которого является треугольник со сторонами а, b и с, на скошенной поверхности ротора имеются пазы (45), в которые уложены цилиндрические ролики (46) с возможностью свободно вращаться. Тормозящий элемент закреплен к основанию (47) пружинами (48) с возможностью перемещения в вертикальной плоскости по направляющим (49), перемещение ротора (бегуна) (42) ограничивается упорами (50), закрепленными к основанию (47), основание (47) резьбовым соединением (51) закреплено к корпусу (15) (фиг. 3). Профиль колодки (43) аналогичный профилю ротора (бегуна) (42), накладка (44) выполнена из материала с высоким коэффициентом трения, контакт между ротором и колодкой осуществлен по скошенным поверхностям через ролики (46). Торможение осуществляется следующим образом. На обмотку статора (41) подается напряжение определенной величины и формы. Ротор (бегун) (42) движется в сторону, указанную на фиг. 5 стрелкой, и через колодку (43) сообщает накладке (44) движение вверх, которая далее упирается в нижнюю часть рельсовой направляющей (8) (фиг. 2) и за счет возникающей силы трения тележка (6) тормозится. Усилие нажатия накладки (44) на рельсовую направляющую определяется длиной перемещения ротора (бегуна) (42), величиной напряжения, подаваемого на обмотку статора (41) и формой этого напряжения, снятие усилия производится путем перемещения ротора (бегуна) (42) в обратную сторону за счет перекоммутации полюсов обмоток статора (41).
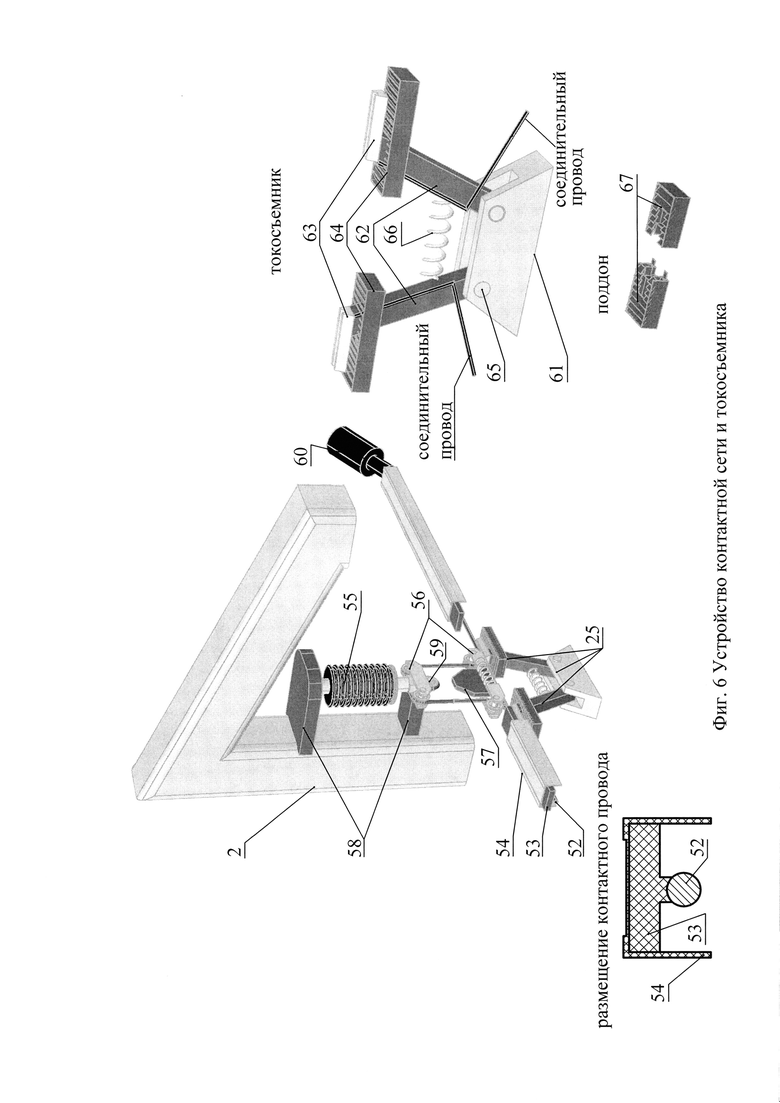
На фиг. 6 показано устройство контактной сети и токосъемника. Вдоль рельсового пути на кронштейнах (2) закреплена контактная сеть, состоящая из контактного провода (52), диэлектрической подкладки (53) и диэлектрического защитного короба (54), через определенные промежутки пути выполнены температурные компенсаторы, состоящие из компенсаторного герметичного сильфона (55), роликового блока (56)и диэлектрической вставки (57), сильфон (55) заполняется газом плотностью р, а его размеры и внутреннее давление газа определяются величиной коэффициента температурного расширения k для данного контактного провода, сильфон (55) и роликовый блок (56)закреплены к диэлектрическим упорам (58), которые жестко соединены с кронштейном (2). Диэлектрическая подкладка (53) снижает величину прогиба контактного провода (52) при подключении токосъемника (25) (фиг. 3), а защитный короб (54) защищает контактный провод от соприкосновения с близко расположенными металлоконструкциями и осадков. Температурный компенсатор действует следующим образом. Например, при повышении температуры окружающей среды до температуры Тср. тек, контактный провод (52) тоже нагревается до этой температуры и удлиняется на некоторую величину ΔL. В это же время компенсационный сильфон (55) вместе с закаченным в него газом также нагревается до температуры Тср. тек. За счет расширения газа сильфон (55) растягивается и воздействует на роликовый блок (56), при этом ролик (59) движется вниз, давит на петлевой участок контактного провода (52) и удлиняет этот петлевой участок, и тем самым компенсирует величину ΔL, на которую удлинился контактный провод. За счет удержания контактного провода (52) устройством предварительного натяжения (60), сохраняется натяжение контактного провода (52). Устройство предварительного натяжения (60) крепится на крайних участках контактной сети к кронштейнам (2), при этом соединение с кронштейном не токопроводящее (крепление в данном описании не приводится). Диэлектрическая вставка (57) удерживается на одном месте и предназначена для того, чтобы заполнить промежуток, между прямолинейными участками контактного провода (52), что позволяет токосъемнику (25) плавно «проходить» данный участок. Токосъемник (25) крепится к корпусу (15) тележки (6) (фиг. 3), и состоит из: вилки (61), через которую осуществляется крепление к корпусу тележки (15); двух диэлектрических штанг (62); двух токосъемных башмаков (63) и двух разборных поддонов (64). Диэлектрические штанги (62) закреплены в вилке пальцами (65) и сцеплены цилиндрической винтовой пружиной растяжения (66). Пружина (66) через штанги (62) прижимает токосъемные башмаки (63) к контактному проводу (52). Поддоны (64) предназначены для сбора пылевых отходов, образующихся при контакте башмака (63) с проводом (52), а также для гашения искр. Исполнение поддона (64) из двух частей связано с удобством обслуживания. Верхняя часть поддона (64) закрыта жалюзи (67), которые удерживают пылевые отходы, внутри поддона при движении тележки (6) (фиг. 2).
Контактный провод (52) является фазным проводником, а нулевым (обратным) проводником является фидер, электрически соединенный с рельсовыми направляющими (8). Сам фидер и его соединение с рельсовыми направляющими на поясняющей фигуре не приводится.
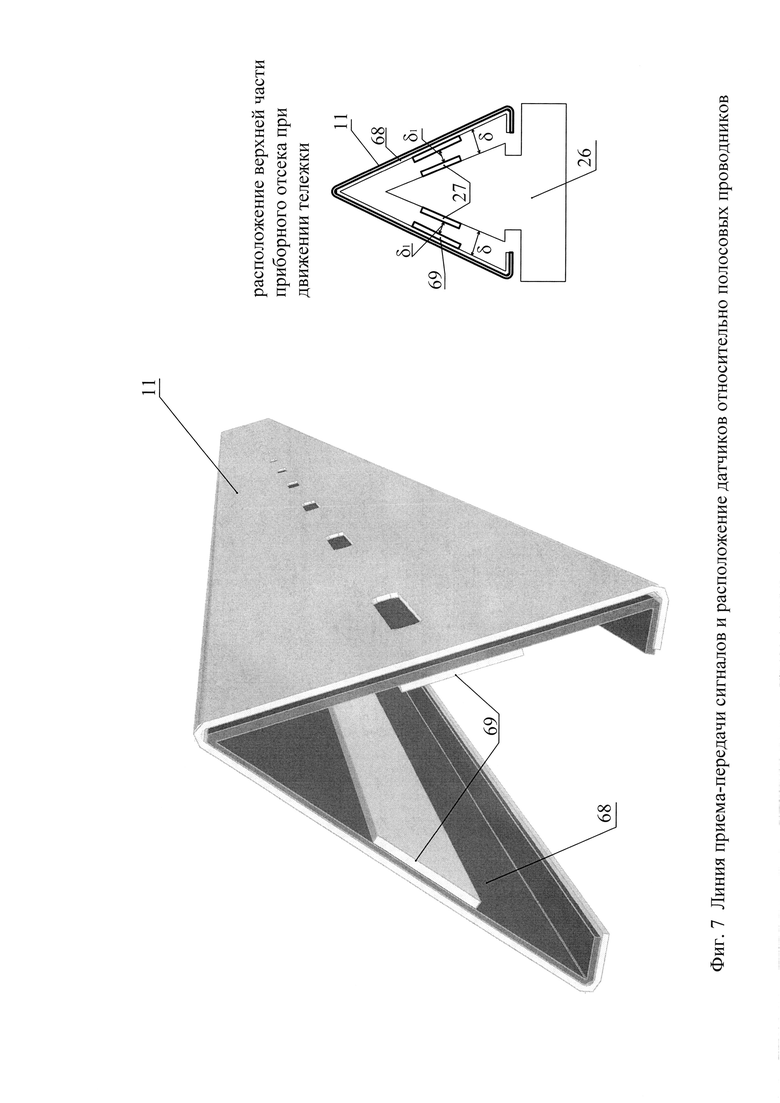
На фиг. 7 представлена линия приема - передачи сигналов и расположение датчиков относительно полосовых проводников. На боковых поверхностях внутренней стороны диэлектрической вставки (68), помещенной в несущую балку (11), закреплены полосовые проводники (69), которые совместно с балкой образуют несимметричную полосковую линию передачи и приема сигналов. Полосовые проводники (69) могут монтироваться как в составе секции (1) (фиг. 1) с последующим соединением между собой, так и более протяженными отрезками уже после соединения секций (1). Также на фиг. 7 пояснено, как располагается верхняя часть корпуса приборного отсека (26) под несущей балкой (11) при движении тележки (6). Зазор δ, учитывает оптимальное расположение корпуса (26), датчиков (27) и проводников (69) от формы пути в плане, индукционные датчики (27) при этом располагаются напротив проводников (69) с зазором δ1. Если по условиям эксплуатации длина полосковой линии устанавливается такой, при которой суммарные потери полосковой линии становятся критичными, то полосковая линия может соединяться через определенные промежутки с параллельно уложенным коаксиальным или оптическим кабелем, при этом выполняются мероприятия при, которых длина полосковой линии не влияет на общие потери (устройство развязок и деление полосковой линии на подключаемые - отключаемые участки).
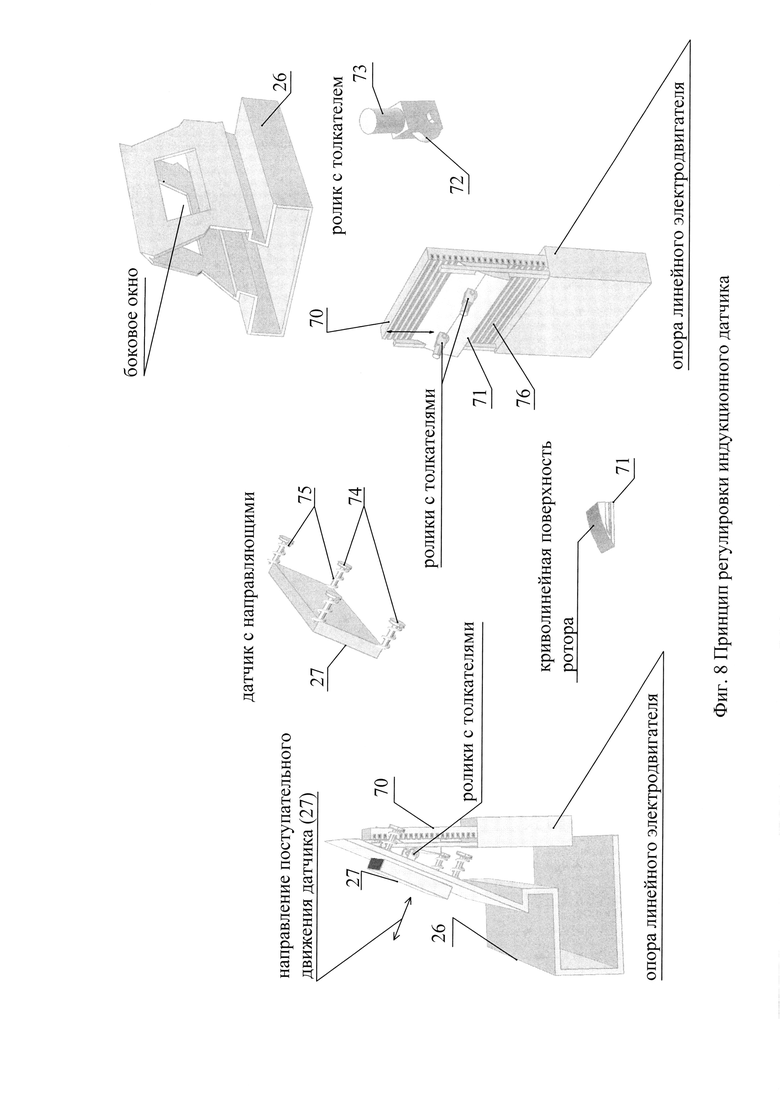
На фиг. 8 показан принцип регулировки положения индукционного датчика. В корпусе приборного отсека (26) тележки (6) (фиг. 3) в боковых окнах, установлены индукционные датчики приема - передачи сигналов (27) с регуляторами зазора между полосовым проводником и приемной поверхностью индукционного датчика. Регулятор зазора выполнен на линейном электродвигателе (70). Ротор (бегун) (71) линейного электродвигателя (70) имеет наружную криволинейную поверхность, на которую через ролики (72) опираются толкатели (73), соединенные с внутренней стороной индукционного датчика (27). Датчик (27) закреплен на направляющих (74) (4 шт.), удерживаемых пружинами (75) (4 шт.), у которых один конец упирается во внутреннюю поверхность корпуса (26), а другой закреплен на направляющей (74). При движении ротора (бегуна) (71) вверх или вниз вдоль статора (76), ролик (72) движется по криволинейной траектории, а точка контакта ролика (72) условно описывает эту траекторию, при этом толкатель (73) выполняет поступательные движения, которые передаются индукционному датчику (27) и тем самым меняется зазор между датчиком (27) и полосовым проводником (69) (фиг. 7). Для фиксации ротора (71) некоторые обмотки статора (76) переводятся в режим работы обмоток электромагнита (некоторые полюса статора работают как электромагниты). На фиг. 8 с целью сохранения информативности рисунка не показаны направляющие толкателя (73) и ограничители движения ротора (71).
Необходимость регулировки зазора и поддержания его в пределах одной установленной величины δ1 при движении тележки (6) (фиг. 2) возникает для сохранения стабильного приема - передачи сигналов и для избегания контакта датчика (27) и полосовым проводником (69). Зазор между датчиком (27) и полосовым проводником (69) может меняться по причине отклонений прямолинейности при монтаже секций (1), при температурных деформациях конструкции, при движении тележки (6) может возникать «рыскание» - боковые колебания и по другим причинам. Зазор δ1 поддерживается по некоторому оптимальному уровню принимаемого (передаваемого) сигнала Uопт, при котором сохраняется максимум необходимой информации (четкость передаваемого изображения, уровни и допустимые искажения управляющих сигналов, передаваемых сигналов телеметрии и др.).
Отклонения ±ΔUопт от Uопт преобразуются в соответствующее управляющее напряжение, подаваемое на статор (76), при этом ротор (бегун) (71) совершает поступательные движения вверх или вниз.
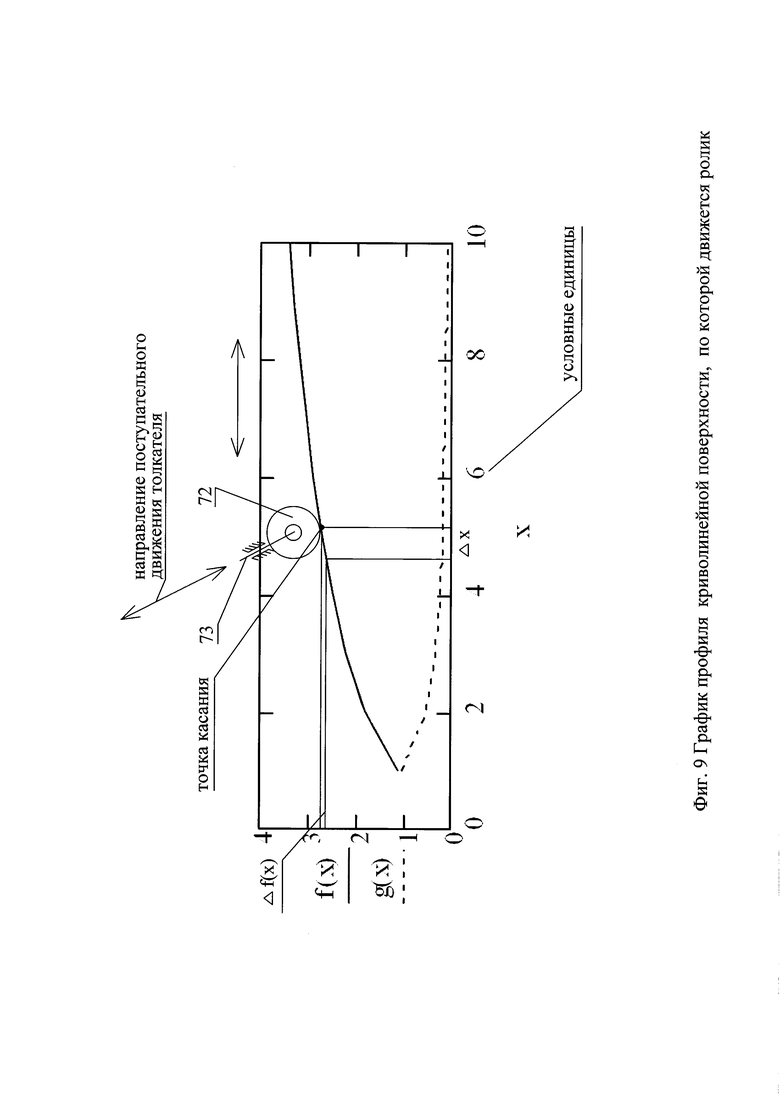
На фиг. 9 в виде графика показана форма профиля криволинейной поверхности, по которой движется ролик. Профиль представлен в виде графика функции  заданной на интервале [х1, х10], интервал показан в условных единицах и связан с размерами статора (76) и с его полюсным делением (размеры статора больше размеров ротора (71) на некоторую фиксированную величину). Для точки касания ролика (72) функция ƒ(x) при движении ротора (71) вправо возрастающая на интервале от 1 до 10 с убывающей скоростью возрастания, что показывает график производной этой функции g(x)=ƒ'(х) (пунктирная линия), а при движении влево - убывающая (от 10 до 1) с возрастающей скоростью убывания. Выбор криволинейной траектории связан с механическими и регулировочными характеристиками линейного электродвигателя (70), убывающая скорость возрастания необходима для плавного уменьшении зазора δ1, а возрастающая скорость убывания необходима для увеличения зазора δ1 за более короткий промежуток времени, например, при опасном сближении датчика (27) с полосовым проводником (69). В целом, при равных скоростях поступательного движения ротора (71) в ту или иную сторону, зазор δ1 увеличивается с большей скоростью, а уменьшается с меньшей скоростью.
заданной на интервале [х1, х10], интервал показан в условных единицах и связан с размерами статора (76) и с его полюсным делением (размеры статора больше размеров ротора (71) на некоторую фиксированную величину). Для точки касания ролика (72) функция ƒ(x) при движении ротора (71) вправо возрастающая на интервале от 1 до 10 с убывающей скоростью возрастания, что показывает график производной этой функции g(x)=ƒ'(х) (пунктирная линия), а при движении влево - убывающая (от 10 до 1) с возрастающей скоростью убывания. Выбор криволинейной траектории связан с механическими и регулировочными характеристиками линейного электродвигателя (70), убывающая скорость возрастания необходима для плавного уменьшении зазора δ1, а возрастающая скорость убывания необходима для увеличения зазора δ1 за более короткий промежуток времени, например, при опасном сближении датчика (27) с полосовым проводником (69). В целом, при равных скоростях поступательного движения ротора (71) в ту или иную сторону, зазор δ1 увеличивается с большей скоростью, а уменьшается с меньшей скоростью.
Примененные в изобретении электрические двигатели - ведущие ролики (20), выполненные в виде мотор - колеса, линейный двигатель тормозного блока (23) и линейный двигатель (70) регулятора зазора между индукционным датчиком (27) и полосовым проводником (69) являются асинхронными машинами переменного тока. Само применение этих устройств на изобретательский уровень не претендует (кроме особенностей в конструкции - вентиляционные каналы в (20) и профили роторов (40), (71)). В описании эти электрические машины упомянуты без пояснения принципа их действия, который известен из соответствующего уровня техники, например, в [3]. Общей особенностью электродвигателей является то, что статоры выполнены многополюсными. Регулировка вращения ротора (33) мотор-колеса (20) и скорости линейного перемещения роторов (40) и (71) осуществляется на основе известных способов [3], путем изменения амплитудного значения напряжения, путем изменения фазы напряжения и путем изменения частоты напряжения на обмотках статоров (31), (39), (76).
Защиту элементов конструкции от атмосферных осадков осуществляют козырек (7) (фиг. 1), корпус (15) тележки (6) (фиг. 3), корпус приборного отсека (26) (который дополнительно при движении тележки (6) частично находится внутри балки (11)) (фиг. 2), защитный короб контактного провода (54) (фиг. 6).
Конструктивные решения позволяют, без каких либо ограничений выполнять требования по молниевой защите и электробезопасности, в частности, устанавливать защитные средства и элементы в соответствии с установленными правилами [4] (например, монтаж молниевозащитного троса над козырьком (7), установка защитных разрядников, монтаж заземляющих устройств и др.).
Борьбу с опасными природными явлениями такими, как гололед (обледенение контактной сети и рельсовых направляющих) предполагается вести электротермическим способом, нагревая контактный провод и рельсовые направляющие до определенной температуры [5].
Работа устройства. Изначально каждая тележка (6) с камерой (4) и устройством силового реагирования (5) расположена на закрепленном за ней участке периметра и может либо двигаться вдоль этого участка, либо оставаться на месте в зависимости от режима работы. Режимы работы определяются при конфигурировании системы охраны и могут изменяться оператором во время ее работы.
Все тележки размещаются в порядке, определенном исходя из возможных угроз. В независимости от режима работы, при получении сигнала от технических средств обнаружения (ТСО) наиболее близко расположенная тележка немедленно начинает перемещаться к месту, где произошло срабатывание. При этом производится оповещение оператора о произошедшем событии. По прибытии тележки на место срабатывания и при обнаружении нарушителя она имеет возможность его автоматического сопровождения, исходя из сигналов от системы обнаружения и используя собственные алгоритмы захвата видеоизображения. Если произошло ложное срабатывание, то по команде оператора тележка возвращается на закрепленный за ней участок периметра и возобновляет предыдущий режим работы. В любой момент времени оператор может подать тележке сигнал на перемещение, а видеокамере поворот или увеличение (уменьшение) изображения. Устройство силового реагирования (5) наводится через изображение камеры и применяется по команде оператора.
Позиционирование тележки (6) производится следующим образом. Путь, составленный из рельсовых направляющих (8) делится на блок-участки (соединение рельсовых направляющих (8) производится с чередованием изолированных и токопроводящих стыков). В пределах отдельного блок-участка каждому перфорированному отверстию в профиле рельсовых направляющих (8) присваивается условный индивидуальный номер (от 1 до N), который соответствует удалению от границы блок-участка или заранее определенной точки на схеме. Условный индивидуальный номер определяется путем автоматического подсчета количества сформированных оптическим датчиком (28) электрических сигналов при прохождении тележки (6) по данному блок-участку, на конкретный текущий момент времени ti и преобразуется в информацию об удалении или местонахождении тележки на данный момент времени. Внутри системы управления информация о месте нахождения тележки (6) выглядит следующим образом: например, тележка на текущий момент времени ti находится на блок-участке №3, против отверстия №200, по заранее известной протяженности блок-участка и удалению отверстия №200 от границы блок-участка №3 (например 3000 мм), автоматически высчитывается удаление от определенной точки или точное местоположение (например, на схеме охраняемого периметра). Если необходимо установить тележку в нужной точке (удаленной на определенное расстояние или находящейся у какого либо ориентира), то система автоматически вычисляет номер блок-участка и номер отверстия и выдает необходимые команды по автоматической установке тележки в нужной точке. Автоматический подсчет перфорированных отверстий на каждом блок - участке позволяет определять и текущую скорость тележки (6) на момент времени ti.
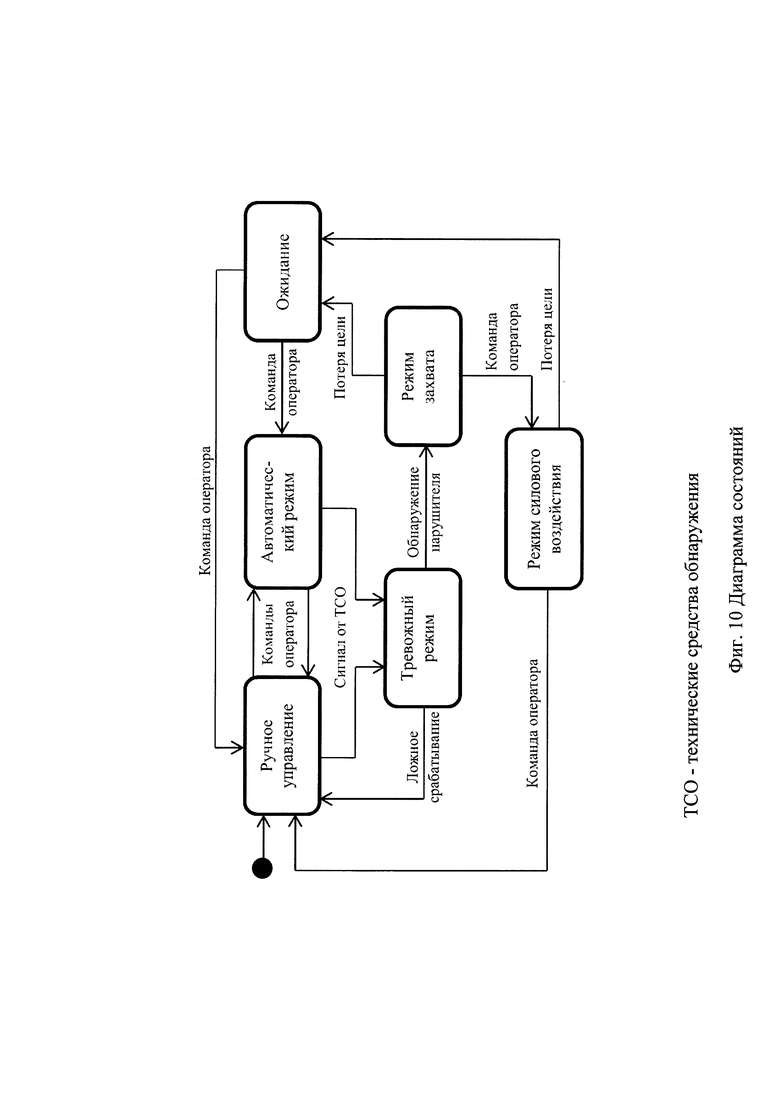
На фиг. 10 показана диаграмма состояний для подвижного модуля видеонаблюдения и силового реагирования. Предусмотрены следующие режимы:
- автоматический: в этом режиме реализуется алгоритм, при котором тележка (6) может двигаться с постоянной или переменной скоростью, останавливаться, стоять некоторое время на месте и др.;
- тревожный режим: в этот режим устройство переводится из автоматического, если произошло срабатывание ТСО, или оператор обнаружил нештатную ситуацию;
- режим ручного управления: устройство переводится по команде оператора, который может уточнить: какое произошло срабатывание ТСО (ложное или неложное) или оператор обнаружил нештатную ситуацию;
- режимы захвата и ожидания реализуются для более тщательной обработки цели (которой могут являться нарушитель, злоумышленник или животное, которое может повредить элементы ограждения);
- режим уничтожения (или воздействия): в этом режиме активируется устройство силового воздействия и далее, например, запуск гранаты с раздражающим средством по цели.
Это воздействие может быть осуществлено с использованием и других летальных или нелетельных средств. В качестве нелетальных средств по видам воздействия могут использоваться:
- оружие, основанное на воздействии различными видами излучений (световым, лазерным, сверхвысокочастотным излучением, электромагнитным импульсом и др.);
- оружие, основанное на воздействии физико-химических композиций (высокоэнергетических, быстроотверждаемых, антифрикционных, электропроводящих, высококлейких, пенообразующих и др.);
- оружие, основанное на электрошоковом воздействии;
- оружие, основанное на акустическом воздействии;
- оружие, основанное на ударном воздействии;
- оружие, основанное на биотехническом воздействии;
- оружие, основанное на комбинированных видах воздействия [6].
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
• средство, воплощающее заявленное изобретение при его осуществлении, расширяет существующий арсенал средств видеонаблюдения и физической защиты;
• для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте изложенной формулы, подтверждена возможность его осуществления с помощью приведенного в заявке описания конструкции;
• средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение усматриваемого заявителем технического результата: осуществлять видеонаблюдение с возможностью оперативного реагирования на ситуации, связанные с попытками проникновения на охраняемый объект.
Следовательно, заявленное изобретение соответствует условию «промышленная применимость».
Источники информации
1. Mark Seaton, Michael Paul, Alexander Geissler. Camera support with continuous rolling strip. UK Patent Application GB 2502427 A, E01B, F16M, G03B.
2. Лойцянский Л.Г. Механика жидкости и газа. Изд. 5-е, переработанное, Главная редакция физико-математической литературы издательства «Наука», М., 1978. - 736 с.
3. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика». - 2-е изд., перераб. и доп. - М.: Высш. шк., 1986. - 335 с.: ил.
4. Справочник по проектированию электрических сетей и электрооборудования / Под ред. Ю.Г. Барыбина и др. - М: Энергоатомиздат, 1991. - 464 с.: ил.
5. Дьяков А.Ф. Предотвращение и ликвидация гололедных аварий в электрических сетях / Пятигорск: Изд-во РП «Южэнерготехнадзор». - 2000. - 284 с.
6. Средства поражения и боеприпасы: Учебник / А.В. Бабкин, В.А. Велданов, Е.Ф. Грязнов и др.; Под общ. ред. В.В. Селиванова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. - 984 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНАЯ ЖЕЛЕЗНОДОРОЖНАЯ ТЕЛЕЖКА | 2000 |
|
RU2196058C2 |
| Ветроэнергетическая установка | 2018 |
|
RU2675957C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2007 |
|
RU2371340C2 |
| Монорельсовая транспортная система | 1984 |
|
SU1311972A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| ВЫСОКОСКОРОСТНАЯ ТРАНСПОРТНАЯ СИСТЕМА, ПОЛАЯ ХОДОВАЯ БАЛКА (ВАРИАНТЫ), ХОДОВАЯ ТЕЛЕЖКА (ВАРИАНТЫ), ПОДВИЖНОЙ СОСТАВ (ВАРИАНТЫ) | 2011 |
|
RU2494897C2 |
| Аэродромная установка рекуперации энергии самолета при посадке для разгона самолета на взлете | 2018 |
|
RU2668768C1 |
| УСТРОЙСТВО ДЛЯ СКЛАДИРОВАНИЯ РЕЛЬСОВЫХ ПЛЕТЕЙ | 2005 |
|
RU2298606C1 |
| ПОДВЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2464188C2 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2168431C2 |
Изобретение относится к области охранных систем видеонаблюдения участков местности, прилегающих к территории охраняемого объекта с внешней и внутренней стороны периметра ограждения. Технический результат заключается в получении практически полного контроля над охраняемым объектом, путем обеспечения наблюдения объекта без мертвых зон с высокой скоростью реагирования на происходящие события в режиме реального времени. Сущность изобретения заключается в том, что разработано техническое решение, позволяющее с помощью одной камеры вести видеонаблюдение протяженного участка периметра, заменяя работу нескольких стационарных видеокамер. При этом имеется возможность оперативно реагировать на нештатные ситуации путем применения устройства силового реагирования, - оперативно определять «ложное» и «неложное» срабатывание датчиков, путем оперативного перемещения камеры к сработавшему датчику, прерывать попытки проникновения или порчи элементов конструкции охранной системы путем воздействия на злоумышленника, например, газом раздражающего действия. Особенностью конструкции является тележка с закрепленной на ней видеокамерой и устройством силового реагирования, и передвигающаяся по рельсовым направляющим, смонтированным на элементах существующего ограждения. 8 з.п. ф-лы, 10 ил.
1. Система охраны с подвижным модулем видеонаблюдения и силового реагирования, содержащая дорожку и тележку, выполненную с возможностью качения тележки вдоль дорожки на роликах с подшипниками, при этом ролики поддерживают корпус тележки, дорожка имеет жесткую несущую раму, изготовленную из нескольких секций, соединенных между собой, полосу прокатки, которая закреплена на несущей раме, и вдоль которой движутся ролики тележки, дорожка при этом содержит информационную кодовую полосу в виде штрих-кода, а тележка содержит детектор, расположенный напротив штрихкода, снизу корпуса тележки на кронштейне закреплена камера с возможностью поворота в горизонтальной плоскости и перемещения в вертикальной плоскости, отличающаяся тем, что каждая секция несущей рамы дорожки выполнена из балки, в виде стального гнутого незамкнутого профиля, а полоса прокатки выполнена в виде закрепленных на балке рельсовых направляющих, при этом соединенные секции образуют протяженную конструкцию, закрепленную верхней частью к кронштейнам консольного типа, которые нижней своей частью опираются на опоры, ролики тележки относительно рельсовой направляющей расположены сверху и снизу, причем верхние ролики тележки ведущие, а нижние - поддерживающие, внутри корпуса тележки, в нижней боковой его части, между поддерживающими роликами закреплен тормозной блок, вдоль всей конструкции на кронштейнах закреплена контактная сеть, состоящая из контактного провода, диэлектрической подкладки и диэлектрического защитного короба, а к корпусу тележки закреплен токосъемник, в нижней части корпуса тележки вдоль центральной продольной оси размещен приборный отсек, в боковых окнах которого установлены с возможностью перемещения индукционные датчики приема - передачи сигналов, внутри боковой части корпуса тележки напротив центральной продольной оси рельсовой направляющей закреплен оптический датчик, излучатель которого закреплен на корпусе тележки с противоположной стороны относительно рельсовой направляющей, в одной плоскости с камерой в нижней части тележки дополнительно установлено устройство силового реагирования, перемещение которого в горизонтальной и вертикальных плоскостях синхронизировано с перемещением камеры в этих плоскостях.
2. Система охраны по п. 1, отличающаяся тем, что профиль балки равнобедренный треугольный, сверху балки на ее краях жестко закреплен дугообразный металлический профиль, при этом балка имеет предварительное продольное напряжение, созданное резьбовыми элементами, жестко закрепленными к балке, и изогнутым металлическим профилем, с которым резьбовые элементы соединены гайками, рельсовые направляющие представляют собой «с»-образный металлический профиль с перфорацией вдоль профиля прямоугольными отверстиями, которые образуют информационную полосу на всей длине конструкции, соединение рельсовых направляющих соседних секций выполнено с чередованием токопроводящих и нетокопроводящих стыков, внутрь несущей балки помещена диэлектрическая вставка, профиль поперечного сечения которой аналогичен профилю несущей балки, на боковых поверхностях внутренней стороны диэлектрической вставки, помещенной в несущую балку, закреплены полосовые проводники, которые совместно с несущей балкой образуют несимметричную полосковую линию передачи и приема сигналов.
3. Система охраны по п. 1, отличающаяся тем, что ведущие ролики выполнены в виде мотор-колеса, имеющего вентиляционный канал, причем отверстия в статоре имеют переменное сечение, а отверстия второй щеки закрыты эластичными клапанами.
4. Система охраны по п. 1, отличающаяся тем, что тормозной блок состоит из линейного электродвигателя и тормозящего элемента, при этом ротор (бегун) линейного электродвигателя выполнен в виде клина, профилем которого является треугольник со сторонами а, b и с, на скошенной поверхности ротора выполнены пазы, в которые уложены цилиндрические ролики с возможностью свободно вращаться по поверхностям качения, тормозящий элемент состоит из колодки, имеющей профиль, аналогичный профилю ротора, с закрепленным на ней прямоугольным бруском, выполненным из материала с высоким коэффициентом трения, контакт между ротором и колодкой осуществлен по скошенным поверхностям через ролики.
5. Система охраны по п. 1, отличающаяся тем, что через определенные промежутки на контактной сети выполнены температурные компенсаторы теплового удлинения (сокращения) контактного провода, состоящие из компенсаторного герметичного сильфона, роликового блока и диэлектрической вставки, сильфон заполняется газом плотностью p, а его размеры и внутренне давление газа определяются величиной коэффициента температурного расширения k для данного провода.
6. Система охраны по п. 1, отличающаяся тем, что токосъемник снабжен съемным поддоном с жалюзи.
7. Система охраны по п. 1, отличающаяся тем, что верхняя часть корпуса приборного отсека имеет профиль поперечного сечения аналогичный несущей балки, а при установке тележки на рельсовые направляющие, корпус приборного отсека находится с зазором 2×δ между внутренними боковыми поверхностями диэлектрической вставки и наружными боковыми скошенными стенками приборного отсека.
8. Система охраны по п. 1, отличающаяся тем, что каждый индукционный датчик приема - передачи сигналов имеет регулятор зазора δ1 между полосовым проводником и приемной поверхностью индукционного датчика, при этом регулятор зазора δ1 выполнен на линейном электродвигателе, ротор (бегун) которого имеет наружную криволинейную поверхность, на которую через ролики опираются толкатели, удерживаемые индивидуальными направляющими и соединенные с внутренней стороной индукционного датчика, сам датчик закреплен на направляющих, удерживаемых пружинами.
9. Система охраны по п. 1, отличающаяся тем, что устройство силового реагирования может быть выполнено в виде нелетального или летального средства воздействия.
| RU 2010106563 A, 10.06.2010 | |||
| СИСТЕМА ОТСЛЕЖИВАНИЯ ПОЛОЖЕНИЯ ПОКУПАТЕЛЕЙ МАГАЗИНА В РЕАЛЬНОМ ВРЕМЕНИ С ПОМОЩЬЮ МНОЖЕСТВЕННОЙ СЕТИ СВЯЗИ | 2009 |
|
RU2470362C2 |
| АВТОМАТИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО КАРФИДОВА И ПУТЬ ДЛЯ НЕГО (ТРАНСКАР) | 2002 |
|
RU2220063C2 |
| DE 4118205 A1, 10.12.1992 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| ТЕЛЕЖКА ГРУЗОВОГО ВАГОНА И ГРУЗОВОЙ ВАГОН | 2010 |
|
RU2514982C2 |

