Изобретение относится к электроприводу и может быть использовано для торможения двигателей постоянного тока.
Известен способ динамического торможения двигателя постоянного тока независимого возбуждения, включающий отключение якоря двигателя от источника питания и замыкание его на резистор [см., например, Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 516 с, стр. 60], т.е. включение двигателя в режим динамического торможения.
Недостаток известного способа заключается в большом времени торможения из-за резкого снижения тормозного момента на низких скоростях
Известен способ торможения двигателя постоянного тока независимого возбуждения противовключением, заключающийся во введении в цепь якоря сопротивления и изменении полярности подводимого к ней напряжения [см., там же, стр. 63].
Недостаток известного способа заключается в его неэкономичности, т.к. из сети потребляется большое количество электроэнергии, расходуемой на торможение, а также в большом времени торможения вследствие наличия в цепи якоря значительного сопротивления, которое увеличивает электромеханическую постоянную времени двигателя.
Известен способ торможения двигателя постоянного тока, включающий включение двигателя в режим динамического торможения, измерение частоты вращения двигателя и при снижении его скорости до значения 0,3÷0,45 от номинальной уменьшение сопротивления резистора в цепи якоря [Вешеневский С.Н. Характеристики двигателей в электроприводе. Изд. 6-е, испр. - М.: Энергия, 1977. - 432 с., рис. 2-27 и стр. 97].
В данном способе точное значение скорости, при которой должен осуществляться переход на вторую ступень не определено, что не позволяет затормозить двигатель за минимально возможное время. Кроме того, динамическое торможение не позволяет быстро затормозить двигатель в связи с тем, что тормозной момент по мере снижения частоты вращения уменьшается до нуля.
Изобретение решает задачу сокращения времени торможения.
Техническим результатом от использования изобретения является сокращение времени торможения за счет строго определенного момента переключения в цепи якоря двигателя и увеличения тормозного момента двигателя на низких скоростях в результате его переключения в режим противовключения.
Это достигается тем, что в способе торможения двигателя постоянного тока, включающем включение двигателя в режим динамического торможения, измерение частоты вращения двигателя и при снижении его скорости до значения 0,3÷0,45 от номинальной уменьшение сопротивления резистора в цепи якоря, согласно изобретению, двигатель переводят в режим противовключения при снижении скорости до (0,762-0,084⋅ηн) от номинальной, где ηн - номинальный КПД двигателя.
Заявляемый способ торможения двигателя постоянного тока отличается заданием конкретного времени переключения двигателя из режима динамического торможения в режим противовключения, причем данное время зависит от КПД и, следовательно, от мощности двигателя. При этом в отличие от торможения противовключения в предлагаемом способе на торможение из сети потребляется значительно меньше энергии, т.к. противовключением двигатель начинает тормозиться с более низкой скорости.
Формула скорости, при котором следует переключить двигатель в режим противовключения в зависимости от КПД двигателя, выведена автором впервые.
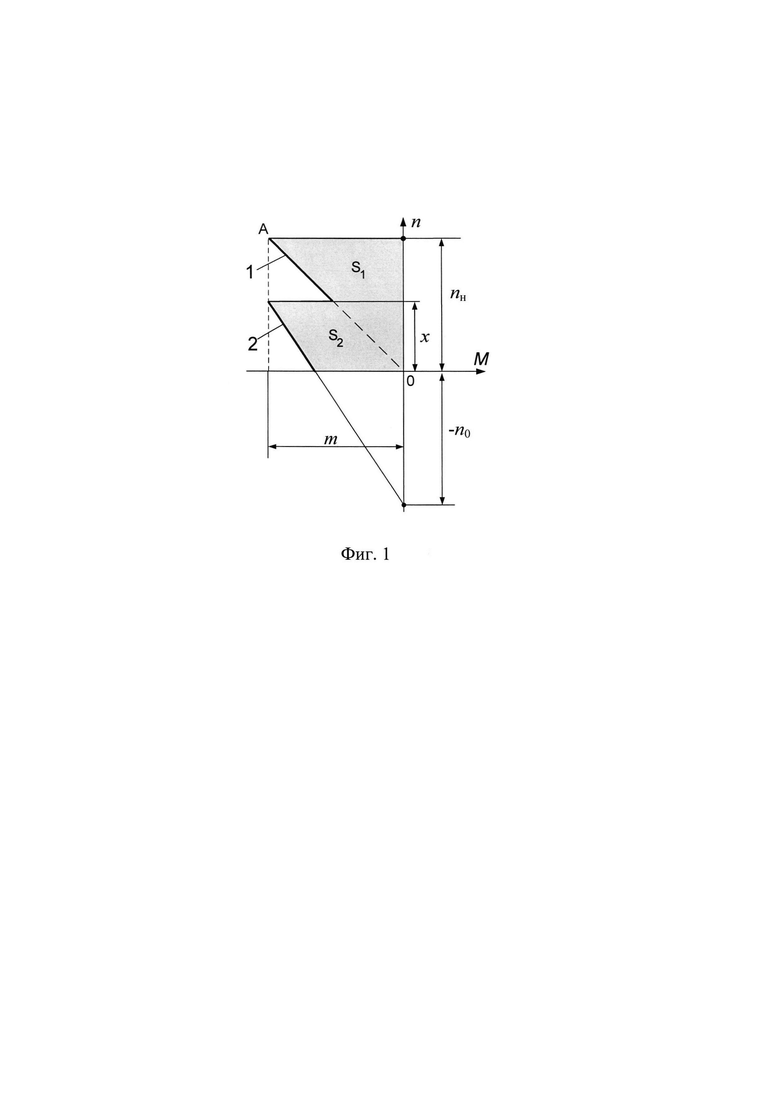
На чертеже представлены тормозные механические характеристики двигателя: 1 - характеристика динамического торможения; 2 - характеристика торможения противовключением.
Минимальное время торможения двигателя получают при максимальной мощности, расходуемой на торможение. Данную мощность определяет площадь, ограничиваемая механическими характеристиками и осями координат (затемненная площадь двух трапеций S1 и S2, фиг. 1). Здесь х=n1 - скорость, при которой суммарное время торможения максимально; m - задаваемый начальный тормозной момент, который определяется перегрузочной способностью двигателя.
Площадь каждой трапеции определим как произведение полусуммы ее оснований на высоту


После преобразований суммарную площадь обеих трапеций находим из выражения

Производная от суммарной площади

Для определения значения x, при котором суммарная площадь максимальна, приравняем производную нулю. Получаем кубическое уравнение

Отношение номинальной скорости и скорости идеального холостого хода двигателя можно описать выражением [Андреев В.П., Сабинин Ю.А. Основы электропривода. - М., Л.: Госэнергоиздат, 1956. - 448 с., стр. 16]

где Ен - номинальная ЭДС якоря;
Uн - номинальное напряжение якоря;
Iн - номинальный ток якоря
Rя - сопротивление якорной цепи.
Сопротивление якорной цепи двигателя ориентировочно находится через номинальный КПД двигателя ηн [Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 516 с, стр. 28]
Отсюда номинальный ток якоря

После подстановки (7) в (6), получим

Используя (8), выразим выражение (5) через паспортные величины: номинальную скорость nн и номинальный КПД ηн двигателя

Считая nн=1, находим значения корней для различных значений ηн. Некоторые значения корней представлены в таблице 1, причем значение при ηн=0 является теоретическим.
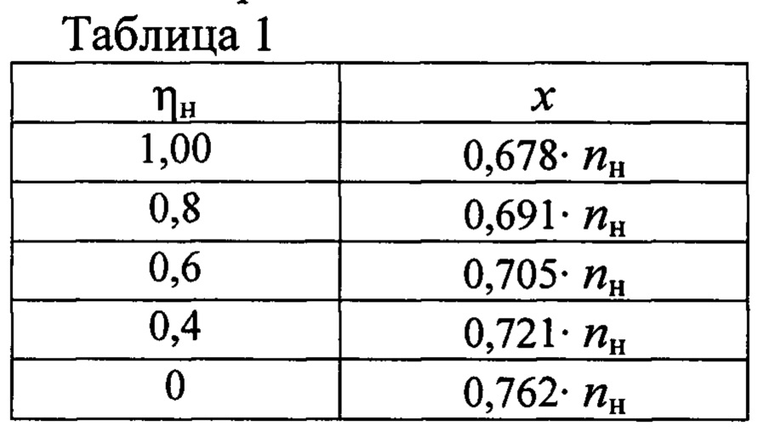
Зависимость х(ηн) практически линейна, поэтому уравнение, описывающее скорость переключения в зависимости от КПД двигателя, можно записать в виде

Например, теоретически при ηн=1 (абсолютно жесткая механическая характеристика) двигатель переходит в режим динамического торможения со скорости идеального холостого хода, nн=n0.
Формула (10), определяющая скорость, при достижении которой следует перевести двигатель с определенным значением КПД в режим противовключения для получения минимального времени торможения, выведена автором впервые. Чем выше КПД двигателя, т.е. чем он мощнее, тем жестче его механическая характеристика, тем меньше должна быть установлена скорость переключения n1 относительно номинальной скорости nн. Например, для двигателей серии 2ПН мощностью от 0,17 кВт (ηн=0,475) до 75 кВт (ηн=0,915) скорость переключения n1, различается на 4,9%

Время замедления двигателя с реактивным моментом сопротивления до скорости 0,02⋅nн при динамическом торможении (продолжение линии 1 на фиг. 1 до нуля) составляет 4Тм1 [см., например, Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 516 с., стр. 269], + где Тм1 - электромеханическая постоянная при динамическом торможении.
Время останова двигателя с реактивным моментом сопротивления и перегрузочной способностью 2,5 при торможении противовключением (линия 2 на фиг. 1 должна начинаться из точки А и пересекать ось скорости при значении момента 0,5m) определим из уравнения переходного процесса момента

откуда время торможения t2=1,79⋅Тм2,
где Тм2 - электромеханическая постоянная времени для режима противовключения.
При этом для ограничения тормозного момента до величины m в цепь якоря включают сопротивление вдвое большее, чем при динамическом торможении, поэтому время останова в режиме противовключения t2=l,79⋅2⋅Тм1=3,58⋅Тм1.
Торможение по предлагаемому способу состоит из двух ступеней. На первой ступени динамического торможения (считаем ηн=0,8, конечное значение момента переключения из табл.1: n1=0,691⋅nн) уравнение переходного процесса момента

откуда t3.1=0,37⋅Ты1. На второй ступени торможения противовключением (линия 2 пересекает ось скорости при значении момента 0,59⋅m, что следует из подобия треугольников, ограниченных характеристикой 1 и осью скоростей) уравнение переходного процесса момента

откуда t3.2=1,15⋅Тм2 Для ограничения тормозного момента до величины т в цепь якоря включают сопротивление в (1+0,59) большее, чем при динамическом торможении, поэтому время работы на второй характеристике
t3.2=1,15⋅(1+0,59)⋅Тм1=1,83⋅Тм1.
Время торможения двигателя по предлагаемому комбинированному способу
t3= t3.1+ t3.2=0,37+1,15=2,2⋅Тм1,
что значительно меньше, чем при динамическом торможении или торможении противовключением.
Осуществление способа рассмотрим на примере двигателя типа 2ПН160МУХЛ2, имеющего следующие паспортные данные [Электродвигатели постоянного тока серии 2ПН http://elektro-dvigateli.ru/postoyannogo-toka/elektrodvigateli-2p-2pf-2pn-2pb.html]: номинальная мощность Рн=4,5 кВт; номинальное напряжение Uн=220 В; номинальная частота вращения nн=1000 об/мин; номинальный КПД η|н=0,795; сопротивление якоря и добавочных полюсов Rs=0,715 Ом.
Номинальный ток двигателя

Номинальная ЭДС
Ен=Uн-Iн⋅Rя=220-31,5⋅0,715=197,5 В.
Ток при торможении ограничим двойным значением номинального тока
Iт=2⋅Iн=2⋅31,5=63 А.
Сопротивление, вводимое в цепь якоря для перевода двигателя в режим динамического торможения

При отключении якоря от сети и замыкании его на Rт1 начинается динамическое торможение двигателя. При снижении скорости до значения n1
n1=(0,762-0,084⋅ ηн)nн =(0,762-0,084⋅0,795)⋅1000=695 об/мин
ток и ЭДС двигателя уменьшится соответственно до значений

После этого двигатель переводят в режим торможения противовключением, включив (для ограничения тока до значения Iт) в его якорную цепь сопротивление

и поменяв на противоположное полярность приложенного к якорю напряжения. При достижении нулевой скорости двигатель отключают от источника питания. При этих условиях время торможения составит минимально-возможное значение.
Изобретение позволяет сократить время торможения двигателя до минимально возможного, что особенно актуально для приводов с большими инерционными массами с частыми пусками и торможениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОРМОЖЕНИЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2023 |
|
RU2817196C1 |
| Способ торможения двигателя постоянного тока | 2024 |
|
RU2836429C1 |
| СПОСОБ ОПТИМАЛЬНОГО ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2468496C1 |
| СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА | 1990 |
|
RU2007834C1 |
| Способ динамического торможения вентильного электродвигателя | 1985 |
|
SU1317629A1 |
| Электропривод постоянного тока | 1985 |
|
SU1288878A1 |
| Реверсивный электропривод постоянного тока | 1989 |
|
SU1598094A1 |
| Электропривод постоянного тока | 1989 |
|
SU1647836A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU748760A1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК В МЕХАНИЗМАХ С СУХИМ ИЛИ ГРАНИЧНЫМ ТРЕНИЕМ | 1997 |
|
RU2126197C1 |
Изобретение относится к области электротехники и может быть использовано для торможения двигателей постоянного тока. Техническим результатом является сокращение времени торможения за счет строго определенного момента переключения в цепи якоря двигателя и увеличения тормозного момента двигателя на низких скоростях в результате его переведения в режим противовключения. Способ торможения двигателя постоянного тока заключается во включении двигателя в режим динамического торможения, измерении частоты вращения двигателя и при снижении его скорости до значения (0,762-0,084⋅ηн) от номинальной переведении его в режим противовключения, где ηн - номинальный КПД двигателя. 1 ил., 1 табл.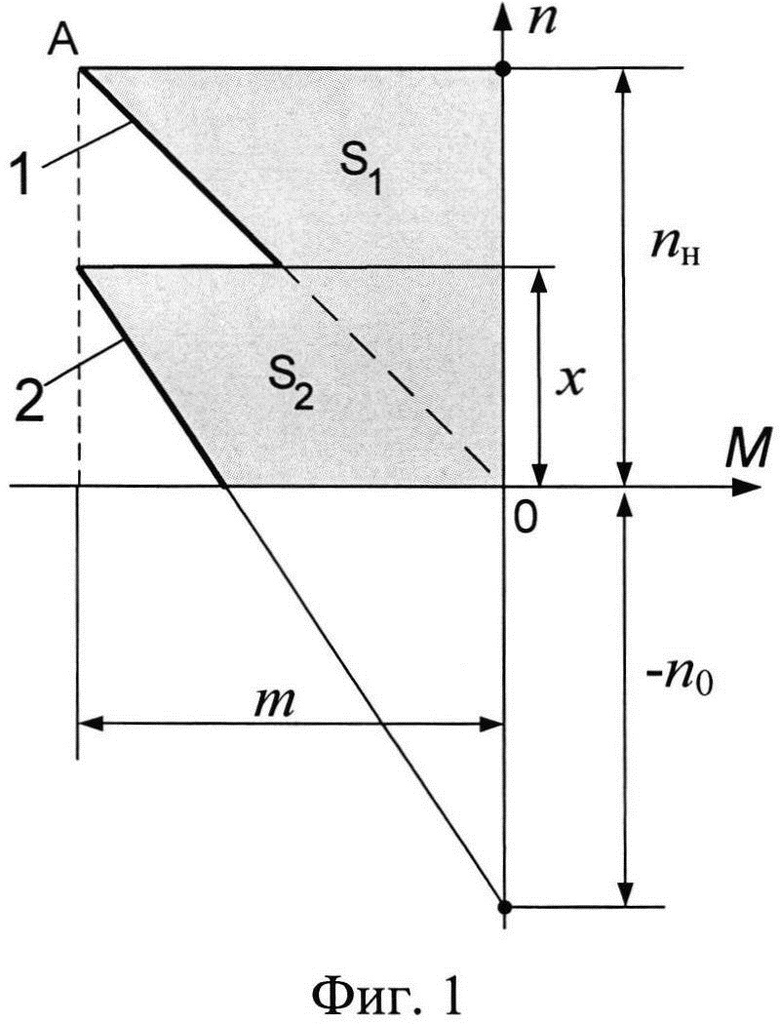
Способ торможения двигателя постоянного тока, включающий включение двигателя в режим динамического торможения, измерение частоты вращения двигателя и при снижении его скорости до значения 0,3÷0,45 от номинальной уменьшение сопротивления резистора в цепи якоря, отличающийся тем, что двигатель переводят в режим противовключения при снижении скорости до (0,762-0,084⋅ηн) от номинальной, где ηн - номинальный КПД двигателя.
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1990 |
|
RU2012055C1 |
| Способ непрерывной регистрации электронограмм | 1960 |
|
SU133955A1 |
| Электропривод постоянного тока | 1985 |
|
SU1272452A1 |
| Электропривод постоянного тока | 1988 |
|
SU1577047A1 |
| БРОНХОСКОП И НАБОР ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ ДЛЯ БРОНХОСКОПА | 2004 |
|
RU2252689C1 |
| JP 52074816 A, 23.06.1977 | |||
| СПОСОБ ПРОИЗВОДСТВА ЦИКОРНО-ГРАНАТОВОГО НАПИТКА | 2008 |
|
RU2368176C1 |
| US 4216420 A1, 05.08.1980 | |||
| US 20080290825 A1, 27.11.2008 | |||
| СПОСОБ ОЧИСТКИ СТОЧНЫХ ВОД, СОДЕРЖАЩИХ НЕФТЬ И/ИЛИ НЕФТЕПРОДУКТЫ С УТИЛИЗАЦИЕЙ ПРОДУКТОВ ОЧИСТКИ | 1999 |
|
RU2150432C1 |

