Изобретение относится к электроприводу и может быть использовано для торможения двигателей постоянного тока.
Известен способ торможения двигателя постоянного тока независимого возбуждения противовключением, заключающийся во введении в цепь якоря сопротивления и изменении полярности подводимого к ней напряжения. (Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 516 с., стр. 64).
Недостаток известного способа заключается в большом времени одноступенчатого торможения вследствие наличия в цепи якоря значительного ограничительного сопротивления, которое увеличивает электромеханическую постоянную времени двигателя.
Известен способ торможения двигателя постоянного тока, включающий включение двигателя в режим динамического торможения и при снижении его скорости до значения (0,762-0,084⋅ηн) от номинальной переводят двигатель в режим противовключения, где ηн - номинальный КПД двигателя. (Патент 2716149 РФ, МПК Н02Р 3/08, Н02Р 3/12, Н02Р 3/14. Способ торможения двигателя постоянного тока, опубл. 06.03.2020. Бюл. № 7).
Недостаток известного способа заключается в большом времени торможения, так как на первом этапе используют динамическое торможение, которое не так эффективно, как торможение противовключением.
Известен способ торможения двигателя постоянного тока, заключающийся во включении двигателя на первую ступень торможения противовключением, измерении частоты вращения двигателя и при снижении скорости до приближенного значения 0,2 от номинальной скорости переключении двигателя на вторую ступень торможения. (Вешеневский С.Н. Характеристики двигателей в электроприводе. Изд. 6-е, испр. - М.: Энергия, 1977. - 432 с., рис. 2-23).
В данном способе точное значение скорости, при которой должен осуществляться переход на вторую ступень торможения не определено, что не позволяет затормозить двигатель за минимально возможное время.
Изобретение решает задачу сокращения времени торможения.
Техническим результатом от использования изобретения является сокращение времени торможения за счет строго определенного момента переключения сопротивления реостата в цепи якоря двигателя.
Это достигается тем, что в способе торможения двигателя постоянного тока, заключающемся во включении двигателя на первую ступень торможения противовключением, измерении скорости вращения двигателя и при снижении скорости вращения двигателя переключении двигателя на вторую ступень торможения, отличающийся тем, что двигатель переключают на вторую ступень торможения путем уменьшения сопротивления реостата в цепи якоря при снижении скорости до (0,338+0,206⋅ηн) от номинальной скорости, где ηн - номинальный КПД двигателя.
Заявляемый способ торможения двигателя постоянного тока отличается заданием конкретной скорости переключения двигателя с первой ступени противовключения на вторую, причем данная скорость зависит от номинального КПД двигателя.
Значение скорости, при которой двигатель следует переключать с первой на вторую ступень противовключения для получения минимального времени торможения, получено автором впервые.
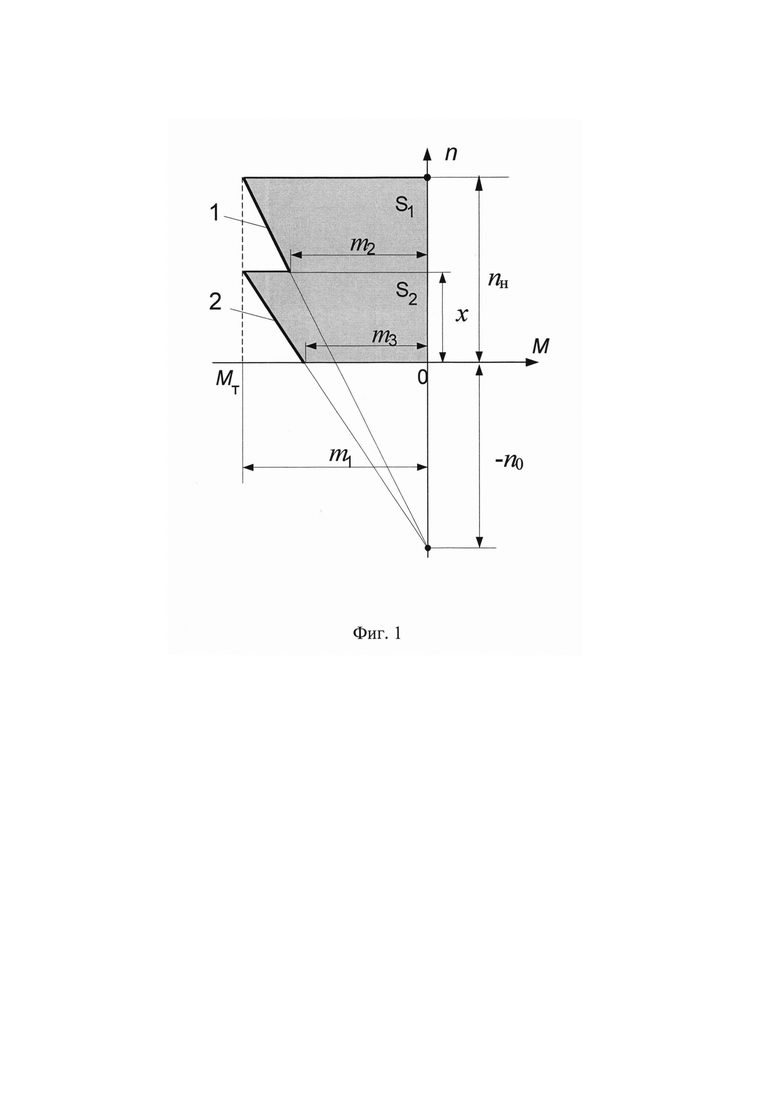
На фиг. 1 представлены механические характеристики для двух ступеней, торможения противовключением: 1 - первая ступень; 2 - вторая ступень.
Минимальное время торможения двигателя получают при максимальной мощности, расходуемой на торможение. Данную мощность определяет площадь, ограниченная механическими характеристиками и осями координат (затемненная площадь двух трапеций S1 и S2, фиг. 1). Здесь n0 - скорость идеального холостого хода; nн - номинальная скорость; х=n1 - скорость, при которой суммарное время торможения минимально; m1 - начальный тормозной момент, который определяется перегрузочной способностью двигателя; m2 - момент при переходе с первой ступени торможения на вторую; m3 - момент при достижении скорости двигателя нулевого значения.
Площадь трапеций определим как произведение полусуммы их оснований на высоту:
Выразим моменты m2 и m3, через момент m1, используя подобие треугольников, образованных между соответствующими тормозными характеристиками, осью скорости и горизонталями на уровнях nн и х:
Подставив значения моментов m2 и m3 в (1) и (2) соответственно, получим:
После преобразований получим суммарную площадь обеих трапеций:

Производная от суммарной площади:

Для определения значения х, при котором суммарная площадь максимальна, приравниваем производную нулю. Получаем кубическое уравнение:

Отношение номинальной скорости и скорости идеального холостого хода двигателя можно описать выражением (Андреев В.П., Сабинин Ю.А. Основы электропривода. - М., Л.: Госэнергоиздат, 1956. - 448 с., стр. 16):

где Ен - номинальная ЭДС якоря;
Uн - номинальное напряжение якоря;
Iн - номинальный ток якоря
Rя - сопротивление якорной цепи.
Сопротивление якорной ориентировочно находится через номинальный КПД двигателя ηн (Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 516 с., стр. 28):

Отсюда номинальный ток якоря:

После подстановки (13) в (11), получим:

Используя (14), выразим формулу (10) через паспортные величины: номинальную скорость nн и номинальный КПД ηн двигателя:

Находим значения корней для различных значений ηн. Некоторые значения корней представлены в таблице 1, причем значение при ηн=0 является теоретическим.
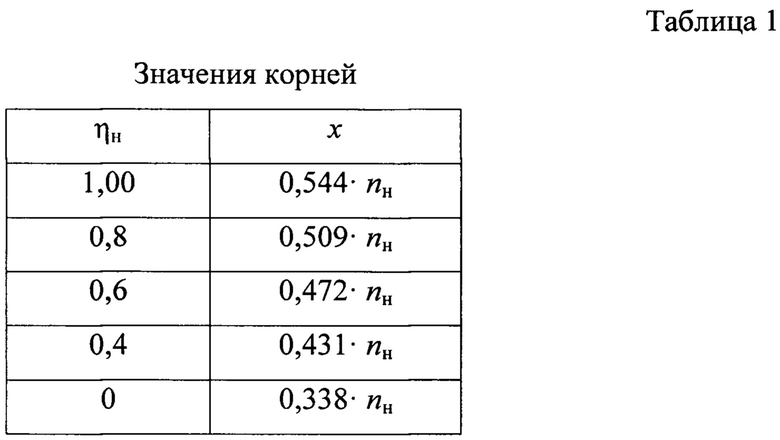
Зависимость х(ηн) линейна, поэтому уравнение, описывающее скорость переключения в зависимости от КПД двигателя, можно записать в виде:

Чем мощнее двигатель, т.е. чем выше его КПД, тем жестче его механическая характеристика, тем больше должна быть установлена скорость переключения n1 относительно номинальной скорости nн. Например, теоретически при ηн=1 (абсолютно жесткая механическая характеристика) двигатель переходит в режим торможения со скорости идеального холостого хода n0. В этом случае при снижении скорости до (0,338+0,206⋅1)⋅nн=0,544nн двигатель должен быть переведен на вторую ступень противовключения за счет уменьшения сопротивления реостата в цепи якоря.
Осуществление способа рассмотрим на примере двигателя П-81У4, имеющего следующие паспортные данные (https://servomotors.ru/documentation/electromotor/book1/book1р65.html): номинальная мощность Рн=19 кВт, номинальное напряжение Uн=440 В, номинальная скорость nн - 1000 об/мин, номинальный КПД ηн=81,5%.
Скорость идеального холостого хода определяем из выражения (13):

Скорость переключения на вторую ступень торможения определяем из выражения (15):

При данном значении скорости момент двигателя снижается от максимального значения m1 до значения m2, которое можно выразить через m1, используя формулу (3):

Номинальный момент:

Максимальный момент при условии, что перегрузочная способность двигателя составляет 2,5:

Момент при переходе с первой ступени противовключения на вторую:

Номинальный ток якоря:
Сопротивление якоря определим из формулы (11)

Номинальная ЭДС:

Максимальный ток (начальный ток на первой и второй ступенях торможения) при условии, что перегрузочная способность двигателя составляет 2,5:

Сопротивление, вводимое в цепь якоря при переключении двигателя на первую ступень торможения противовключением:

При снижении скорости до значения n1=506 об/мин ЭДС двигателя уменьшится до значения:
Сопротивление, вводимое в цепь якоря при переключении двигателя на вторую ступень торможения:

Ток, при котором осуществляется переключение с первой ступени торможения на вторую за счет уменьшения сопротивления реостата в цепи якоря:

Таким образом, если управление режимом торможения осуществляется по принципу тока, переключение на вторую ступень торможения следует осуществлять при снижении тока до значения 346 А. При этом условии время торможения будет минимально.
При достижении нулевой скорости двигатель отключают от источника питания.
Изобретение позволяет сократить время торможения двигателя до минимально возможного, что актуально для приводов с большими инерционными массами с частыми пусками и торможениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения двигателя постоянного тока | 2024 |
|
RU2836429C1 |
| Способ торможения двигателя постоянного тока | 2019 |
|
RU2716149C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Электропривод постоянного тока (его варианты) | 1983 |
|
SU1279038A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU748760A1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ ВРАЩАТЕЛЬНОГО МОМЕНТА И ЕГО СИСТЕМА УПРАВЛЕНИЯ | 2005 |
|
RU2322747C2 |
| ПРИВОДНОЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА С ЦЕПЬЮ САМОВОЗБУЖДЕНИЯ ПИТАНИЯ ОБМОТКИ ЯКОРЯ | 2011 |
|
RU2476981C1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
Изобретение относится к электроприводу и может быть использовано для торможения двигателей постоянного тока. Техническим результатом от использования изобретения является сокращение времени торможения за счет строго определенного момента переключения в цепи якоря двигателя, при котором осуществляется перевод двигателя с первой ступени на вторую ступень противовключения. Способ торможения двигателя постоянного тока заключается во включении двигателя на первую ступень торможения противовключением, измерении скорости вращения двигателя и при снижении скорости вращения двигателя, переключении двигателя на вторую ступень торможения путем уменьшения сопротивления реостата в цепи якоря при снижении скорости до (0,338+0,206⋅ηн) от номинальной скорости, где ηн - номинальный КПД двигателя. 1 ил.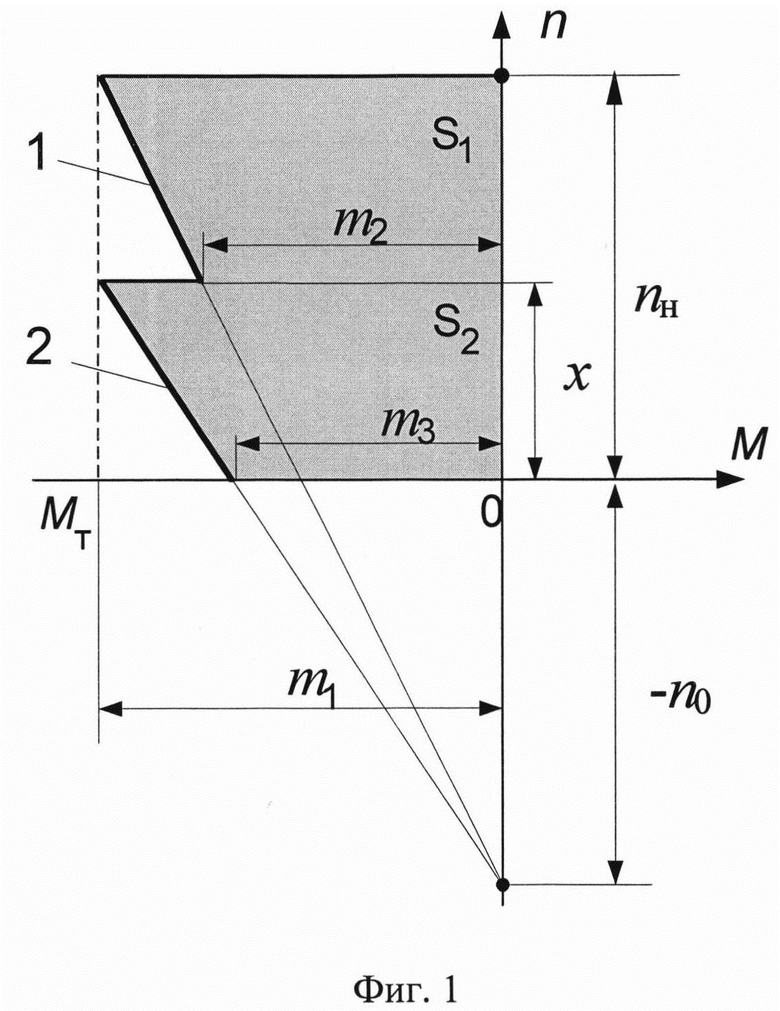
Способ торможения двигателя постоянного тока, заключающийся во включении двигателя на первую ступень торможения противовключением, измерении скорости вращения двигателя и при снижении скорости вращения двигателя переключении двигателя на вторую ступень торможения, отличающийся тем, что двигатель переключают на вторую ступень торможения путем уменьшения сопротивления реостата в цепи якоря при снижении скорости до (0,338+0,206⋅ηн) от номинальной скорости, где ηн - номинальный КПД двигателя.
| Способ торможения двигателя постоянного тока | 2019 |
|
RU2716149C1 |
| Устройство для динамического торможения двигателя постоянного тока | 1973 |
|
SU462260A1 |
| US 3855512 A, 17.12.1974 | |||
| Устройство для динамического торможения электродвигателя постоянного тока | 1976 |
|
SU647821A1 |
| УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ ТЯГОВОГО ДВИГАТЕЛЯ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ | 0 |
|
SU255978A1 |
| CN 108418476 A, 17.08.2018. | |||

