Группа изобретений относится к области судостроения, в частности к способам автоматизированного управления движением судна на морском волнении с целью снижения килевой и бортовой качки до требуемых значений (по использованию специальной техники, а также технических средств судна) и системам информационной поддержки при прокладке оптимального курса и выбора оптимальной скорости хода при управлении движением судна (корабля). Изобретение обеспечивает возможность поддержания параметров бортовой и килевой качки судна (корабля) при его движении на морском волнении в требуемых пределах, допустимых для выполнения различных работ (операций) на море.
Из уровня науки известно, что на параметры качки судна при его движении на морском волнении влияет скорость хода судна и его курсовой угол (источник, например: Книга «Качка судов на морском волнении», И.К. Бородай, Ю.А. Нецветаев, 1969 г.. Судостроение, Ленинград; Параграф 16 «Влияние скорости хода судна и курсового угла на частотные характеристики качки»)
Скорость судна и курсовой угол волны (КУВ) относительно направления бега волн, помимо интенсивности и спектрального состава волнения, являются определяющими факторами, влияющими на вертикальную, килевую и бортовую качку судна. При этом в наибольшей степени изменение скорости судна и КУВ влияет на качку через их влияние на частоту возмущающих сил и демпфирование бортовым колебаниям судна. Известно, что самые интенсивные колебания любой системы, в том числе и качка судна, происходят в районе резонанса, т.е. когда частота возмущения равна (или близка) собственной частоте колебаний системы. В случае плавания водоизмещающего судна без хода на нерегулярном волнении наиболее сильная бортовая качка наблюдается при положении судна лагом к волнам. С ростом скорости хода на лаговом волнении из-за увеличения демпфирования колебаниям бортовая качка судна уменьшается. Изменение при этом КУВ может приводить как к увеличению, так и уменьшению амплитуд бортовой качки в зависимости от того, насколько сближаются или расходятся кажущаяся (частота качки судна на волнении) и собственная частота бортовой качки судна.
Например, при движении судна, собственная частота бортовой качки которого составляет 0,52 рад/с (собственный период равен 12 с) на волнении силой 5 баллов (период максимума спектра равен 6,9 с) со скоростью 20 узлов при КУВ=60° (КУВ=0° - встречное волнение) кажущаяся частота качки приблизительно составляет 1,34 рад/с, при КУВ=120° - 0,48 рад/с. Таким образом, при ходе на попутном волнении судно будет двигаться вблизи резонанса по бортовой качке, на встречных курсах к волнению - далеко от него в условиях существенно меньшей интенсивности бортовой качки, чем на попутных курсах.
Что касается продольной качки судна, то из-за существенно меньшего собственного периода килевой и вертикальной качки по сравнению с бортовой, интенсивная качка развивается не в области резонанса на коротких волнах, где возмущающие силы небольшие, а на более длинных волнах. Максимальные амплитуды килевой качки водоизмещающих судов традиционной архитектуры возникают обычно на встречных КУВ при плавании судна на волнах, длина которых в зависимости от скорости, составляет (0,9-1,2) длины судна. Наиболее интенсивная вертикальная качка происходит при плавании судна при КУВ, близких 90°.
Также из уровня техники известны различные способы управления движением судна и автоматизированные системы их реализующие, например, такие как: «Способ управления движением корабля при развитом морском волнении» по патенту на изобретение RU 2368536 С1 (МПК В63Н 25/04), «Способ управления движением корабля с диагнозом сбоев» по патенту на изобретение RU 2394721, «Информационно-управляющий комплекс для автоматизации судовождения и динамического позиционирования судна» по патенту RU 107124, «Система автоматического управления движением судна по заданной траектории» по патенту RU 151140, «Аппаратура управления движением судна, использующая оценки фазовых координат и оценки внешних возмущений» по патенту RU 151294, «Система управления движением судна с оценкой внешних возмущений» по патенту RU 161001.
Известные системы - аналоги изобретения, в большей степени направлены на удержание судна на заданном маршруте, поддержание заданного режима движения судна и оптимизацию систем, обеспечивающих автоматизированное управление движением судна.
За прототип изобретения - Способа автоматизированного управления движением судна на морском волнении с целью снижения бортовой и килевой качки, принят способ управления движением судна с использованием «Универсальных штормовых диаграмм Ю.В. Ремеза» (источник: Интернет-сайт: https://studopedia.su/1_41374_universalnie-shtormovie-diagrammi-yu-v-remeza.html, дата добавления материала: 2014-01-03). Также описано в источнике - П.П. Грузинский, П.М. Хохлов, Справочное пособие «Аварийно-спасательное дело и борьба за живучесть судна», Москва, «Транспорт», 1977 г, со стр. 24. Данный способ позволяет по известным параметрам судна и окружающей среды в текущий момент времени определить новые параметры движения судна (скорость и курс), при которых возможно снижение параметров качки. К недостаткам известного способа можно отнести его низкую эффективность на протяженном маршруте, невозможность построить весь маршрут с учетом совокупности требований к параметрам движения судна для выполнения какой-либо задачи, применение способа возможно только в режиме реального времени, а также нет возможности придерживаться заданного маршрута или определенных удаленных друг от друга точек маршрута, то есть изменение курса судна в сторону наибольшего снижения интенсивности качки может увести от маршрута принципиально.
Техническим результатом группы изобретений является повышение автоматизации управления движением судна, при котором достигается выполнение требований по поддержанию целевых параметров движения судна, в том числе килевой и бортовой качки судна, а также вертикальных перемещений, в заданных пределах, допустимых для выполнения требуемой задачи судна, за счет автоматизированного определения маршрута (параметров курса и скорости хода) на отдельных участках при одновременном повышении эффективности способа.
Технический результат достигается изобретением за счет того, что в способе автоматизированного управления движением судна на морском волнении с целью снижения бортовой и килевой качки, согласно изобретению,
используя, по меньшей мере, одно электронное средство вычислительной техники, которое реализует команды, заранее записанные на машиночитаемом носителе информации и содержащие правила ввода, обработки и вывода данных средством вычислительной техники,
получают данные о требованиях к значениям целевых параметров движения судна, а также к значениям амплитуд килевой, бортовой качки и вертикальных перемещений судна,
получают данные о требованиях к области прокладки маршрута,
получают данные о параметрах судна:
1) длина, ширина, геометрия корпуса судна,
2) данные о нагрузке масс: водоизмещение, координаты центра тяжести,
3) параметры текущей посадки судна и начальной остойчивости,
4) результаты модельных и натурных мореходных испытаний судна: параметры качки судна при определенных параметрах волнения, курсовых углах и скоростях, параметрах движения судна, и параметрах судна: осадка, координаты центра тяжести,
5) данные мореходных испытаний: расчетные и экспериментальные данные о буксировочном сопротивлении судна, демпфировании бортовой качки, потере скорости хода в условиях волнения заданной интенсивности,
6) результаты буксировочных, самоходных и маневренных испытаний по определению буксировочного сопротивления судна, коэффициентов взаимодействия движительного комплекса с корпусом судна, и характеристик управляемости, устойчивости на курсе и параметров циркуляции судна,
7) статистические данные по реальному поведению судна и его параметрам качки в зоне, где судно уже проходило эксплуатацию,
получают данные о следующих параметрах судна: координаты судна, курс и скорость судна, характерные амплитуды вертикальных и угловых перемещений (килевой и бортовой качки), скоростей и ускорений, а также периодов качки судна,
выполняют построение координатной расчетной сетки, определяя координаты узлов сетки, при этом одному из узлов сетки присваивают координаты судна в его текущем положении, направление сетки принимают соответствующим текущему курсу судна, а форму ячейки сетки принимают в виде квадрата с длиной стороны, определяемой по формуле:
LBклетки=K*Lволны/Lсудна, где
LBклетки - длина стороны квадрата ячейки сетки в длинах судна,
K - эмпирический коэффициент, связывающий длину волны с длиной судна при текущей эксплуатационной осадке, принимаемый для судов длиной до 100 метров - 120, а для судов длиной больше 400 метров - 180,
Lволны - длина характерной волны в районе плавания при максимально допустимом волнении для целевых задач применения судна, определенная, например, в атласе волнения «Ветер и волны в океанах и морях. Справочные данные» по заданному району плавания,
Lсудна - длина судна по текущей эксплуатационной осадке,
после определения координат узлов сетки выполняют привязку полученных данных о требованиях к области прокладки маршрута к узлам сетки, при этом привязка областей недопустимых или обязательных для прокладки маршрута осуществляется путем построения огибающей вдоль границ таких областей по координатам ближайших узлов сетки, в сторону увеличения площади для недопустимых областей и в сторону уменьшения площади для обязательных областей,
а привязку точек недопустимых или обязательных для прокладки маршрута к узлам сетки выполняют, выбирая ближайший узел сетки к точке обязательной для прокладки маршрута через нее, а для точки недопустимой для прокладки маршрута через нее выбирают ближайший узел сетки и задают недопустимую область с границей, проходящей по четырем ближайшим к выбранному узлу сетки узлам,
в виде многомерных числовых массивов получают от доступных источников данные о параметрах окружающей среды в предполагаемой области прокладки маршрута с привязкой к координатам и определенным моментам времени: фиксирования и/или прогноза значений параметров,
при этом параметры окружающей среды, по меньшей мере, содержат следующие данные:
1) Направление распространения волнения,
2) Скорость волны,
3) Характерная высота волны,
4) Средняя длина волны,
выполняют привязку полученных данных о параметрах окружающей среды от источников к координатам узлов сетки и текущему расчетному моменту времени,
для узлов сетки, которые находятся внутри области с границей, проходящей по точкам с известными по данным источников параметрами, определяют значения параметров путем аппроксимации по точкам с известными параметрами и узлам сетки,
возможный вид аппроксимации функции изменения параметров реализуется в виде степенных рядов по формуле:
(a+ПарN)n, где
а - константа, определяемая путем применения типового математического аппарата,
n=1…5 - степень бинома, чем выше, тем точнее аппроксимация,
ПарN - один из видов параметров: курсовой угол волны, скорость волны, длина волны или высота волны,
за расчетный момент времени при определении прогнозных значений параметров для первого участка маршрута принимается текущий момент времени, а для последующих участков маршрута - момент времени достижения судном очередной точки в узле сетки предшествующего участка,
определение прогнозных значений параметров в узлах сетки на расчетный момент времени осуществляют, используя векторное сложение значений направления и скорости волны и кинетических энергий в узлах сетки, тем самым получают векторное поле общего волнового потока и поле распределения энергий, по которым определяют значения параметров окружающей среды: направление и скорость волны, высота и длина волны, в узлах сетки на текущий или иной расчетный момент времени,
по формулам:
Векторная сумма скоростей
Суммарная кинетическая энергия
, где
i - номер узла сетки
Vi - скорость волны в i-ом узле сетки,
V∑ - прогнозные значения скорости суммарного волнового потока в расчетный момент времени в заданном узле сетки, по которому определяют скорость и курсовой угол волны в расчетный момент времени в заданном узле сетки,
mi - присвоенное значение массы водного объема волны в i-ом узле сетки, рассчитываемое по известным высоте и длине волны в i-ом узле сетки,
Ei - энергия волны в i-ом узле сетки,
Е∑ - прогнозные значения энергии волны в расчетный момент времени в заданном узле сетки, по которым определяют прогнозные значения высоты и длины волны в расчетный момент времени в заданном узле сетки,
причем узлам сетки, в которых параметры окружающей среды не были определены в результате привязки данных о параметрах к узлам сетки и при определении прогнозных значений параметров на требуемый расчетный момент времени, присваивают статус точек недопустимых для прокладки маршрута судна,
в узлах сетки, на которые на расчетный момент времени нет влияния параметров от других узлов, значения параметров принимаются равными их значениям на предыдущий расчетный момент времени,
в частном случае реализации способа,
при определении значений параметров окружающей среды с привязкой к узлам сетки и расчетному моменту времени, привязку данных к узлам сетки с помощью аппроксимации и к расчетному моменту времени, используя векторное сложение значений направления и скорости волны и кинетических энергий в узлах сетки, выполняют отдельно по данным о значениях параметра от каждого источника,
далее для каждого узла данные по каждому параметру окружающей среды от разных источников, пересчитанные в координатах узлов сетки и на один расчетный момент времени, группируют на не противоречащие друг другу по критерию разницы значений не больше чем на 20% от наименьшего в группе,
далее из групп данных для последующей обработки выбирают ту группу, которая имеет в сумме большую достоверность на расчетный момент времени,
по каждому источнику данных о параметрах окружающей среды задают достоверность предоставляемых им значений параметров на момент их фиксирования или прогноза,
при этом достоверность прогнозных значений параметров на требуемый расчетный момент времени по данным одного источника определяют как отношение достоверности источника данных на момент фиксации или прогноза данных к количеству часов, определяемому как разница между расчетным моментом времени для прогноза и временем фиксации или прогноза данных от источника, по формуле:
Dpмв=Dмвд/(Kt*(Tрмв-Тмвд)), где
Dpмв - достоверность прогнозных значений параметра на расчетный момент времени,
Dмвд - достоверность значений параметра от источника данных на момент времени их фиксирования или прогноза,
Трмв - значение расчетного момента времени, в часах,
Тмвд - значение момента времени фиксирования или прогноза значений параметра источником данных, в часах,
Kt - коэффициент равный «1», если Трмв>Тмвд, и равный «- 1», если Трмв<Тмвд,
а достоверность группы данных о значениях одного параметра от разных источников на расчетный момент времени определяют, как сумму достоверностей данных от каждого источника на расчетный момент времени,
для каждого узла сетки присваивают значение параметра окружающей среды на текущий расчетный момент времени, как усредненное значение по значениям параметра из выбранной группы,
причем для присвоенных прогнозных значений определяют достоверность на текущий расчетный момент времени как сумму достоверностей данных о параметре из выбранной группы,
и используют достоверность присвоенных прогнозных значений для определения очередной достоверной группы данных в случае получения новых данных о параметрах окружающей среды,
после определения значений параметров окружающей среды в узлах сетки и на расчетный момент времени определяют все возможные варианты маршрутов судна по узлам сетки и параметров движения судна: курсовой угол судна к волне и скорость судна относительно поверхности воды, на участках маршрута, при которых может быть обеспечено выполнение заданных требований,
задают параметры начальной точки маршрута, причем за начальную точку принимают точку узла сетки, соответствующую положению судна на текущий момент времени,
причем для каждой очередной точки маршрута определяют все возможные ее координаты из числа всех допустимых точек в узлах сетки, расположенных в допустимой для прокладки маршрута области, до которых возможно проложить прямолинейный маршрут,
с учетом требований по области прокладки маршрута и с учетом недопустимых областей, в которых не были определены данные о параметрах окружающей среды ни в результате привязки полученных данных к узлам сетки, ни в результате определения прогнозных значений параметров окружающей среды в расчетный момент времени, когда судно достигло предшествующей точки маршрута,
определяют множество курсов судна до всех возможных координат очередной точки маршрута,
задают в расчет все возможные из допустимых скоростей движения судна «на режиме» на участке маршрута до очередной точки с шагом в один узел: от «0» до максимальной скорости хода судна,
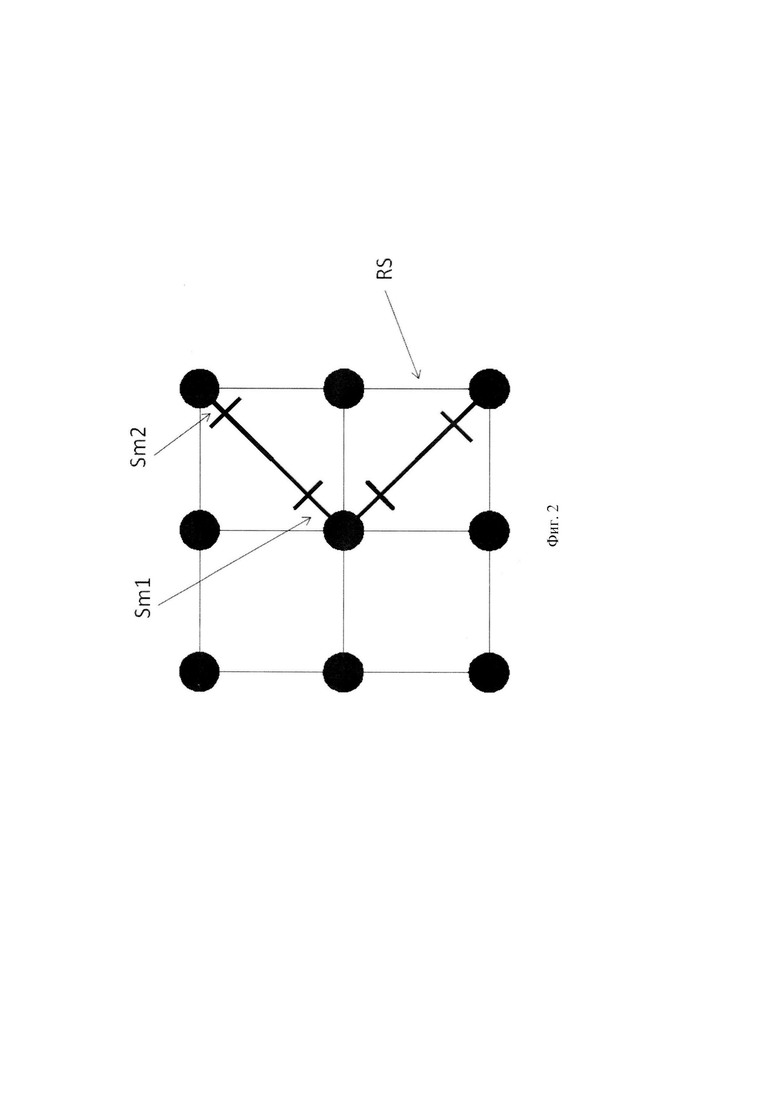
при этом время достижения судном очередной точки на участке маршрута определяют по известным или вычисляемым расстояниям между узлами сетки и заданным скоростям судна «на режиме», а также по получаемым данным о параметрах, характеристиках и результатах испытаний судна: максимальной допустимой скорости судна, соответствующей углу маневра, который необходимо выполнить в узле сетки для перехода на очередной участок маршрута, максимальным допустимым значениям ускорения и торможения судна при движении на прямолинейном участке маршрута.
таким образом, время достижения судном очередной точки определяют по формуле:
Т=tм1+tpeж+tм2, где
Т - время достижения судном очередной точки маршрута,
tм1 - время на участке изменения скорости маневра в предшествующей точке на скорость режима на участке маршрута,
tм2 - время на участке изменения скорости режима на участке маршрута на максимально допустимую скорость очередного маневра,
tреж - время на участке маршрута, проходимом со скоростью режима
при этом
tм1, определяют по формуле
tм1=(Vман1-Vреж)/а, где
V ман 1 - максимально допустимая скорость судна на участке выполнения маневра в предшествующей точке,
V реж - заданная скорость движения судна на режиме,
а - максимально допустимое ускорение или торможение судна,
tм2, определяют по формуле
tм2=(Vреж-Vман2)/а, где
V реж - заданная скорость движения судна на режиме,
V ман 2 - максимально допустимая скорость судна на участке выполнения маневра в очередной точке,
а - максимально допустимое ускорение или торможение судна,
tреж, определяют по формуле
tреж=Sреж/Vреж, где
S реж - длина участка маршрута проходимого со скоростью режима без ускорения,
V реж - заданная скорость режима на участке маршрута,
S реж, определяют как
Sреж=Sуч-Sм1-Sм2, где
S уч - известное общее расстояние участка маршрута между узлами сетки,
Sм1 - длина участка изменения скорости со скорости маневра на предшествующей точке на скорость режима, вычисляемая как
Sм1=a*(tм1)2/2,
Sм2 - длина участка изменения скорости со скорости режима на скорость маневра на очередной точке, вычисляемая как
Sм2=а*(tм2)2/2,
для всех определенных ранее вариантов курсов и всех вариантов скоростей судна, с учетом прогнозных значений параметров окружающей среды в предшествующей точке на расчетный момент ее достижения судном, определяемых как описано выше по данным от источников и уже имеющимся данным о присвоенных расчетных прогнозных значениях параметров в узлах сетки, определяют значения прогнозных целевых требуемых параметров, в том числе параметров качки судна, на участках маршрута от предшествующей точки ко всем возможным вариантам очередной точки,
для определения параметров качки судна на участке маршрута используют известную методику, при условиях:
- судно движется при неработающих рулях, то есть от предшествующей точки к очередной точке в данной модели курсовой угол меняется один раз - в начале;
- скорость хода судна и курсовой угол волны постоянны (на выбранном участке маршрута);
- волнение имеет трехмерный характер;
- величина скорости хода соответствует числу Фруда от Fr=0,0 до Fr=0,3;
при этом из шести видов колебаний судна под действием волн рассматриваются три: бортовая и килевая качка и вертикальные перемещения, для определения которых используют следующие уравнения:
- бортовая качка

- вертикальные перемещения
- килевая качка
- в уравнении (1) nθ - собственный период бортовой качки судна,
В44 - безразмерный коэффициент демпфирования бортовой качки, зависящий от амплитуды колебания θ. Эта зависимость принимается по данным эксперимента из материалов мореходных испытаний судна,
в уравнениях (2) и (3) коэффициенты Вij и Сij представлены в виде двух слагаемых: при нулевой скорости хода и зависящего от скорости хода υ. При этом коэффициенты для нулевой скорости хода Вij=Вji и Сij=Сji.
При указанных условиях уравнения (1) - (3) описывают качку судна на волнении.
Следует иметь в виду, что первое уравнение - бортовая качка - явилось результатом упрощения полного, содержащего кинематику поперечно-горизонтального перемещения центра тяжести (ЦТ) судна. Как известно, например, из источника: Справочник по теории корабля, т. 2, Л., изд. - «Судостроение», 1985, в результате анализа расчетных и экспериментальных материалов установлено, что слагаемые, пропорциональные скоростям и ускорениям поперечно-горизонтальных колебаний ЦТ плавающего объекта, практически компенсируют аналогичные по структуре члены в правой части уравнения - гидродинамические составляющие волнового возмущающего момента.
Таким образом, для расчета бортовой качки используют уравнение (1).
Два других вида качки - вертикальные перемещения и килевая качка - оказываются взаимосвязанными.
Расчет статистических характеристик качки судна на нерегулярном волнении выполняется с применением методов спектральной теории качки. В качестве волновых спектров при известных параметрах волнения: высоты волны с обеспеченностью 3% и среднего периода волн, используются спектры Пирсона-Московица или JONSWAP характерные для района эксплуатации судна.
из полученного множества маршрутов до очередной точки и параметров движения судна на них (курс, скорость, координаты очередной точки) выбирают подмножество маршрутов с соответствующими им параметрами движения судна на них, при которых выполняются все заданные целевые требования,
для определения следующей очередной точки для каждого из выбранных подмножеств маршрутов и соответствующих им параметров движения судна (курс, скорость, координаты очередной точки) повторяют шаги способа,
начиная с обработки имеющихся данных о параметрах окружающей среды, которыми могут являться вновь полученные данные от источников и последние расчетные прогнозные значения параметров окружающей среды на предшествующий расчетный момент времени,
и заканчивая построением всех возможных маршрутов, на которых выполняются все заданные требования,
причем при получении каких-либо новых данных, кроме данных о требованиях к значениям целевых параметров движения судна, повторяют все шаги способа, но с сохранением полученной ранее расчетной координатной сетки, а при получении новых данных о требованиях к значениям целевых параметров движения судна повторяют все шаги способа,
также по всем вариантам маршрутов рассчитывают итоговые значения таких параметров как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после определения всех вариантов маршрутов по точкам сетки и параметров движения на участках между ними выбирают вручную один из вариантов маршрутов и соответствующий ему набор параметров движения судна, наиболее подходящий под задачи эксплуатации судна, принимая во внимание один или несколько из таких параметров маршрутов, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после чего осуществляют управление движением судна по расчетным точкам выбранного маршрута за счет ввода расчетных параметров движения судна в органы управления судном: рулевую машину и главные двигатели, обеспечивающие выполнение заданных параметров движения.
Описанные выше методы выполнения этапов способа не являются исчерпывающими, а только частными случаями реализации.
Описанный способ также может иметь частные случаи реализации, приведенные ниже.
Требования к значениям целевых параметров могут быть заданы, например, как:
- диапазоны допустимых значений,
- диапазоны допустимых значений, с допуском отклонения от диапазона,
- набор требований с приоритетом по их выполнению: если не выполняется первый набор требований - применяют второй, если не выполняется второй набор требований - применяют третий и т.д.,
- любая возможная комбинация требований, в том числе с привязкой к точкам или областям или участкам прокладки маршрута,
- требование минимизации или максимизации значений одного или нескольких параметров на маршруте.
Требованиями также могут являться следующие параметры:
1) скорости, ускорения, периоды килевой, бортовой качки и вертикальных перемещений заданных точек судна;
2) продолжительность поддержания и/или длина пути, при которых целевые параметры должны быть в заданном диапазоне;
3) направление и скорость набегающего ветрового потока в точке маршрута, которые не прогнозируются, а измеряются в точке фактического нахождения судна;
4) время на маршруте;
5) длина пути;
6) расход топлива, достигаемый за счет максимизации зон попутного волнения и минимизации зон встречного волнения при прокладке маршрута.
Требования могут задаваться как совокупность параметров под конкретную заранее установленную задачу или под пользовательскую задачу или как произвольная пользовательская установка требуемых параметров.
Требования по совокупности параметров могут быть установлены, например, под следующие задачи:
1) минимизация параметров килевой, бортовой качки и вертикальных перемещений заданных точек судна;
2) обеспечение минимального или максимального времени плавания в районе плавания или на маршруте;
3) поддержание амплитуд качки в заданных пределах;
4) снижение расхода топлива (может быть достигнуто, например, за счет прокладки маршрута судна через зоны попутного волнения и течений);
5) безопасная эксплуатация и функционирование систем, оборудования и механизмов судна, например, таких как: главные двигатели, дизель-генераторы, топливная система, системы гидравлики и другие, где может происходить, например, неблагоприятный переток жидкостей под действием качки, который не позволит системам работать (оголение датчиков в системах и цистернах, гидроудары под действием качки и слеминга, возникновение воздушных пространств в системах и тому подобное);
6) взлет и посадка летательных аппаратов самолетного и вертолетного типа, поскольку для самолетов и вертолетов корабельного базирования есть ограничения по взлетам и посадкам по качке и ветру;
7) безаварийная и безопасная эксплуатация вооружения и технических средств корабля, использование вооружения, с ограничениями применения по параметрам качки;
8) выполнение операций авианосной ударной группировки (авианосец, подводная лодка, крейсер, 2 эсминца, 4 фрегата, судно снабжения, танкер-заправщик)
9) использование Ударного вооружения;
10) авиационная поддержка десанта с воздуха;
11) плавучий КП (командный пункт) и т.д.
Требования к области прокладки маршрута могут представлять собой различные варианты комбинаций данных о точках или зонах обязательных и недопустимых к прокладке маршрута судна через них.
Такими требованиями, в частности, могут быть: несколько точек, через которые необходимо проложить маршрут, область в которой необходимо проложить маршрут, области, в которых недопустима прокладка маршрута, например, области навигационных опасностей - мелей, узкостей и других, а также области ситуационных опасностей - области вокруг каких-либо объектов, в том числе движущихся судов, области вблизи средств поражения противника.
В качестве начальной точки может быть задано текущее расположение судна или любая другая точка, но с дополнительными данными по маршруту до этой точки или данными о времени достижения этой точки.
Данные требования могут быть, например, в виде следующих данных: координаты точек, данные об областях (как координаты противоположных узлов в прямоугольных областях, или как координата центра и радиуса в областях формы круга, или как координаты двух точек прямой и половины ширины области в виде полосы, или как привязка к координатам подвижного объекта и радиуса от них, или иная совокупность координат).
Дополнительными данными о параметрах судна и его движения могут быть, например, параметры результирующего ветрового потока на судно в настоящее время, а также данные о том, что в определенное время или в определенной области маршрута изменится нагрузка судна. Данные о времени или месте предполагаемого изменения нагрузки судна могут быть получены вместе с требованиями по целевым параметрам движения для выполнения какой-либо задачи судна. Получение таких данных позволит более точно строить маршрут с учетом планируемых изменений параметров судна.
Кроме этого, во время эксплуатации судна, данные о фактических параметрах его движения в точках с известными координатами и при известных параметрах судна и состояния окружающей среды могут записываться и служить обновлением для исходных данных натурных мореходных и маневренных испытаний. Такие обновленные данные могут получать при реализации заявленного способа с целью повышения точности прогнозирования целевых требуемых параметров при определении вариантов маршрутов и параметров движения, при которых они достигаются.
В случае, когда способ применяют одновременно для нескольких судов, например, движущихся группой или раздельно, то по каждому из этих судов получают все необходимые данные.
Построение расчетной координатной сетки с ячейкой в форме квадрата с известной длиной стороны обеспечивает возможность определить длину любого отрезка между узлами сетки: длину прямолинейного участка по узлам сетки, проходящего по сторонам квадрата ячейки сетки - как сумму длин участков между узлами, а длину прямолинейного участка между узлами, не являющимися ближайшими друг к другу, как длину гипотенузы прямоугольного треугольника со сторонами известной длины (длина прямолинейных участков между узлами сетки по сторонам квадратной ячейки сетки) по теореме Пифагора.
В отдельных случаях может быть предусмотрено изменение размера координатной расчетной сетки в зависимости от поставленной задачи или получаемых данных. На размер ячейки сетки может влиять «плотность» полученных данных о параметрах окружающей среды (воздушной и морской) и частота их обновления.
При получении данных о параметрах окружающей среды также могут быть получены данные о следующих параметрах: период волны, спектр волнения, данные ветрового потока в точке фактического расположения судна (курсовой угол, скорость).
В качестве источников данных о значениях параметров окружающей среды, могут применяться:
- стационарные или мобильные метеостанции и метеоцентры - получаем значения параметров окружающей среды с привязкой ко времени и координатам, в том числе прогноз значений параметров (например, 4 раз в сутки) по заданному району плавания. Получаемые данные могут учитывать в том числе текущие спутниковые и иные данные и статистические данные по району плавания,
- спутники - получаем значения параметров окружающей среды с привязкой ко времени и координатам, в том числе и прогнозные значения параметров (например, 4 раз в сутки) по заданному району плавания,
- справочные издания - получаем статистические значения параметров окружающей среды с привязкой к координатам или району плавания и времени года,
- мобильные средства разведки, например, такие как самолет-разведчик или другое судно или иные - получаем значения параметров окружающей среды с привязкой ко времени и координатам по области маршрута следования мобильного средства разведки в заданном районе плавания. Возможно частое или регулярное обновление данных, покрытие большой площади района плавания при наличии достаточного количества средств разведки. Ограничение на использование мобильных средств разведки - недопустимые штормовые условия,
- поля волновых буев - получаем значения параметров окружающей среды с привязкой ко времени и координатам по области расположения волновых буев. Данный источник информации имеет локальное распространение, но по областям расположения предоставляет регулярно обновляемые актуальные данные.
Достоверность фиксированных или прогнозных данных по типам источников задается эмпирически. В данном случае под достоверностью понимается точность данных, получаемых от источника. То есть источник с высокой достоверностью предоставляет более точные данные и наоборот. При этом значение достоверности фиксированных или прогнозных данных источника на расчетный момент времени принимают обратно пропорциональным разнице времени между расчетным моментом времени и соответственно моментом времени фиксирования или прогноза данных от источника в часах.
При определении прогнозных параметров окружающей среды на расчетный момент времени уже имеющиеся прогнозные расчетные значения параметров окружающей среды на предшествующий расчетный момент времени, в случае их наличия, также используют в очередном расчете, как данные отдельного источника с достоверностью, определенной на расчетный момент времени.
При выполнении расчета значений параметров качки судна на участках маршрута могут использовать методику для водоизмещающих судов РД 5.1003-80 Руководящий документ. Методика расчета качки водоизмещающих кораблей и судов (УДК 629.12.001.2.073, введен с 1 июля 1981 г.)
Также целевыми требуемыми параметрами могут являться время или длина пути, причем требованием может являться, как допустимый диапазон значений, так и их минимизация или максимизация. Данные параметры рассчитываются по каждому из вариантов маршрутов путем суммирования их значений на всех участках маршрутов.
Одним из дополнительных целевых параметров может являться расход топлива на маршруте. Так, например, требованием к маршруту может являться минимизация расхода топлива. Данное требование может быть реализовано, например, способом путем прокладки маршрута с движением максимально долго в зонах с попутным курсу судна волнением и минимизацией движения в зонах встречного волнения.
Если в результате применения способа не построено ни одного маршрута, то изменяют требования к целевым параметрам, например, путем увеличения диапазонов их допустимых значений или ввода дополнительных параметров с приоритетом их выполнения, или иным образом.
При реализации способа управления движением судна может быть предусмотрена его оптимизация по результатам сравнения прогнозных значений целевых параметров движения судна на участках маршрута с фактическими значениями целевых параметров, измеряемых во время движения судна по маршруту, а также по результатам сравнения данных о прогнозных значениях параметров окружающей среды на участках маршрута с фактическими значениями параметров окружающей среды во время движения судна по маршруту.
В частном случае реализации способа сравнивают прогнозные и фактические значения целевых параметров на участке маршрута и при выявлении отклонений фактических значений целевых параметров, в том числе параметров качки судна, как в большую, так и в меньшую сторону от прогнозных значений этих параметров на участке маршрута выполняют оптимизацию путем соответственно занижения или повышения требований к значениям целевых параметров и повторения шагов способа с учетом измененных требований для перестроения маршрута начиная с очередной точки маршрута построенного изначально. За счет оптимизации повышается эффективность реализации способа.
Технический результат достигается изобретением - системой, за счет того, что в системе автоматизированного управления движением судна на морском волнении,
состоящей из процессора, блока памяти, устройств ввода и вывода данных, блоков, обеспечивающих возможность получения и передачи данных, блока, обеспечивающего возможность подачи питания к системе, средств коммутации, обеспечивающих коммутацию элементов системы между собой,
согласно изобретению система реализована в виде компьютера, содержащего блоки, обеспечивающие возможность получения данных от различных источников, в том числе от системы управления судном, и обеспечивающие возможность передачи данных в различные системы, в том числе передачи управляющих команд или сигналов в систему управления судном, процессор сконфигурирован с возможностью выполнения команд и инструкций о правилах ввода, обработки и вывода данных, содержащихся в блоке памяти, при выполнении которых
получают данные о требованиях к значениям целевых параметров движения судна, а также к значениям амплитуд килевой, бортовой качки и вертикальных перемещений заданных точек судна,
получают данные о требованиях к области прокладки маршрута,
получают данные о параметрах судна:
1) длина, ширина, геометрия корпуса судна,
2) данные о нагрузке масс: водоизмещение, координаты центра тяжести,
3) параметры текущей посадки судна и начальной остойчивости,
4) результаты модельных и натурных мореходных испытаний судна: параметры качки судна при определенных параметрах волнения, курсовых углах и скоростях, параметрах движения судна, и параметрах судна: осадка, координаты центра тяжести,
5) данные мореходных испытаний: расчетные и экспериментальные данные о буксировочном сопротивлении судна, демпфировании бортовой качки, потере скорости хода в условиях волнения заданной интенсивности,
6) результаты буксировочных, самоходных и маневренных испытаний по определению буксировочного сопротивления судна, коэффициентов взаимодействия движительного комплекса с корпусом судна, и характеристик управляемости, устойчивости на курсе и параметров циркуляции судна,
7) статистические данные по реальному поведению судна и его параметрам качки в зоне, где судно уже проходило эксплуатацию,
получают данные о следующих параметрах судна: координаты судна, курс и скорость судна, характерные амплитуды вертикальных и угловых перемещений (килевой и бортовой качки), скоростей и ускорений, а также периодов качки судна,
выполняют построение координатной расчетной сетки, определяя координаты узлов сетки, при этом одному из узлов сетки присваивают координаты судна в его текущем положении, направление сетки принимают соответствующим текущему курсу судна, а форму ячейки сетки принимают в виде квадрата,
после определения координат узлов сетки выполняют привязку полученных данных о требованиях к области прокладки маршрута к узлам сетки,
в виде многомерных числовых массивов получают от доступных источников данные о параметрах окружающей среды в предполагаемой области прокладки маршрута с привязкой к координатам и определенным моментам времени: фиксирования и/или прогноза значений параметров,
при этом параметры окружающей среды, по меньшей мере, содержат следующие данные:
1) Направление распространения волны,
2) Скорость волны,
3) Характерная высота волны,
4) Средняя длина волны,
выполняют определение значений параметров окружающей среды в узлах сетки на расчетный момент времени путем привязки полученных данных о параметрах окружающей среды от источников к координатам узлов сетки и текущему расчетному моменту времени,
для узлов сетки, которые находятся внутри области с границей, проходящей по точкам с известными по данным источников значениями параметров, определяют значения параметров путем аппроксимации по точкам с известными параметрами,
возможный вид аппроксимации функции изменения параметров реализуется в виде степенных рядов по формуле:
(а+ПарN)n, где
а - константа, определяемая путем применения типового математического аппарата,
n=1…5 - степень бинома, чем выше, тем точнее аппроксимация,
ПарN - один из видов параметров: курсовой угол волны, скорость волны, длина волны или высота волны,
за расчетный момент времени при определении прогнозных значений параметров для первого участка маршрута принимается текущий момент времени, а для последующих участков маршрута - момент времени достижения судном очередной точки в узле сетки предшествующего участка,
при этом определение прогнозных значений параметров в узлах сетки на расчетный момент времени осуществляют, используя векторное сложение значений направления и скорости волны и кинетических энергий в узлах сетки, тем самым получают векторное поле общего волнового потока и поле распределения энергий, по которым определяют значения параметров окружающей среды: направление и скорость волны, высота и длина волны, в узлах сетки на текущий или иной расчетный момент времени,
по формулам:
Векторная сумма скоростей
Суммарная кинетическая энергия
. где
i - номер узла сетки
Vi - скорость волны в i-ом узле сетки,
V∑ - прогнозные значения скорости суммарного волнового потока в расчетный момент времени в заданном узле сетки, по которому определяют скорость и курсовой угол волны в расчетный момент времени в заданном узле сетки,
mi - присвоенное значение массы водного объема волны в i-ом узле сетки, рассчитываемое по известным высоте и длине волны в i-ом узле сетки
Ei - энергия волны в i-ом узле сетки,
Е∑ - прогнозные значения энергии волны в расчетный момент времени в заданном узле сетки, по которым определяют прогнозные значения высоты и длины волны в расчетный момент времени в заданном узле сетки,
причем узлам сетки, в которых параметры окружающей среды не были определены в результате привязки данных о параметрах к узлам сетки и при определении прогнозных значений параметров на требуемый расчетный момент времени, присваивают статус точек, недопустимых для прокладки маршрута судна,
в узлах сетки, на которые на расчетный момент времени нет влияния параметров от других узлов, значения параметров принимаются равными их значениям на предыдущий расчетный момент времени,
определяют все возможные варианты маршрутов судна по узлам сетки и параметров движения судна: курс и скорость судна, на участках маршрута, при которых может быть обеспечено выполнение заданных требований,
при этом задают параметры начальной точки маршрута, причем за начальную точку принимают точку узла сетки, соответствующую положению судна на текущий момент времени,
причем для каждой очередной точки маршрута определяют все возможные ее координаты из числа всех допустимых точек в узлах сетки, расположенных в допустимой для прокладки маршрута области, до которых возможно проложить прямолинейный маршрут,
с учетом требований по области прокладки маршрута и с учетом недопустимых областей, в которых не были определены данные о параметрах окружающей среды ни в результате привязки полученных данных к узлам сетки, ни в результате определения прогнозных значений параметров окружающей среды в расчетный момент времени, когда судно достигло предшествующей точки маршрута,
определяют множество курсов судна до всех возможных координат очередной точки маршрута,
задают в расчет все возможные из допустимых скоростей движения судна «на режиме» на участке маршрута до очередной точки с шагом в один узел: от «0» до максимальной скорости хода судна,
определяют время достижения судном очередной точки на участке маршрута,
для всех определенных ранее вариантов курсов и всех вариантов скоростей судна, с учетом прогнозных значений параметров окружающей среды в предшествующей точке на расчетный момент ее достижения судном, определяемых как описано выше по данным от источников и уже имеющимся данным о присвоенных расчетных прогнозных значениях параметров в узлах сетки, определяют значения прогнозных целевых требуемых параметров, в том числе параметров качки судна, на участках маршрута от предшествующей точки ко всем возможным вариантам очередной точки,
из полученного множества маршрутов до очередной точки и параметров движения судна на них (курс, скорость, координаты очередной точки) выбирают подмножество маршрутов с соответствующими им параметрами движения судна на них, при которых выполняются все заданные целевые требования,
для определения следующей очередной точки для каждого из выбранных подмножеств маршрутов и соответствующих им параметров движения судна (курс, скорость, координаты очередной точки) повторяют шаги способа,
начиная с обработки имеющихся данных о параметрах окружающей среды, которыми могут являться вновь полученные данные от источников и последние расчетные прогнозные значения параметров окружающей среды на предшествующий расчетный момент времени,
и заканчивая построением всех возможных маршрутов, на которых выполняются все заданные требования,
причем при получении каких-либо новых данных, кроме данных о требованиях к значениям целевых параметров движения судна, повторяют все шаги способа, но с сохранением полученной ранее расчетной координатной сетки, а при получении новых данных о требованиях к значениям целевых параметров движения судна повторяют все шаги способа,
также по всем вариантам маршрутов рассчитывают итоговые значения таких параметров как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после определения всех вариантов маршрутов по точкам сетки и параметров движения на участках между ними выбирают вручную один из вариантов маршрутов и соответствующий ему набор параметров движения судна, наиболее подходящий под задачи эксплуатации судна, принимая во внимание один или несколько из таких параметров маршрутов, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после чего осуществляют управление движением судна по расчетным точкам выбранного маршрута за счет ввода расчетных параметров движения судна в органы управления судном: рулевую машину и главные двигатели, обеспечивающие выполнение заданных параметров движения.
При этом все частные случаи реализации способа также могут быть реализованы и в системе.
Результатом работы системы можно назвать выдачу и применение автоматически определенных информационных рекомендаций по прокладке оптимального маршрута (выбора оптимального курса в точках расчетной сетки для обеспечения маневрирования) и выбора оптимальной скорости хода, которые в частном случае могут быть направлены на снижение негативных воздействий на судно окружающей среды, которые вызывают интенсивную качку.
Отличием системы от аналогов является то, что система обеспечивает автоматизированное определение маршрута судна и параметров движения судна по целевым требованиям, в том числе снижение качки судна, которая ухудшает практически все целевые свойства судна как объекта эксплуатации от обитаемости личного состава, работоспособности целевой военной техники, вооружения и систем до снижения скорости и управляемости на волнении.
Компьютер, в виде которого реализована система, может быть любого типа, например: ноутбук, планшетный компьютер, настольный компьютер с подключенными к нему устройствами ввода и вывода данных, компьютер в виде автоматизированного рабочего места с пультом управления и дисплеем в едином корпусе и другие типы.
Компьютер, в виде которого реализована система, может иметь возможность ввода и вывода данных посредством входящих в его состав устройств, причем устройства ввода обеспечивают возможность «ручного» введения данных пользователем, а устройства вывода обеспечивают возможность отображения данных на дисплее компьютера.
При этом компьютер, в виде которого реализована система, не имеет ограничений по месту его эксплуатации и может быть установлен на судне, маршрут которого прокладывают, на другом судне, на берегу, на любом мобильном транспортном средстве или подвижном аппарате таком, как: самолет, спутник, поезд, подводная лодка, беспилотный летательный аппарат и другие.
Система может быть интегрирована с системой управления судном, а также может быть интегрирована с корабельными средствами разведки волнения: это и спутник и обмен данными с метеостанциями и автоматическая выдача целеуказаний самолету-разведчику, который базируется на судне или судах группировки.
При эксплуатации система получает данные и их обновления и, используя их, прогнозирует параметры окружающей среды в узлах сетки на необходимые расчетные моменты времени. На основании полученных данных и требований система прокладывает весь маршрут судна.
Сущность группы изобретений поясняется иллюстрациями результата применения способа и частного случая реализации системы автоматизированного управления движением судна на морском волнении с целью снижения бортовой и килевой качки:
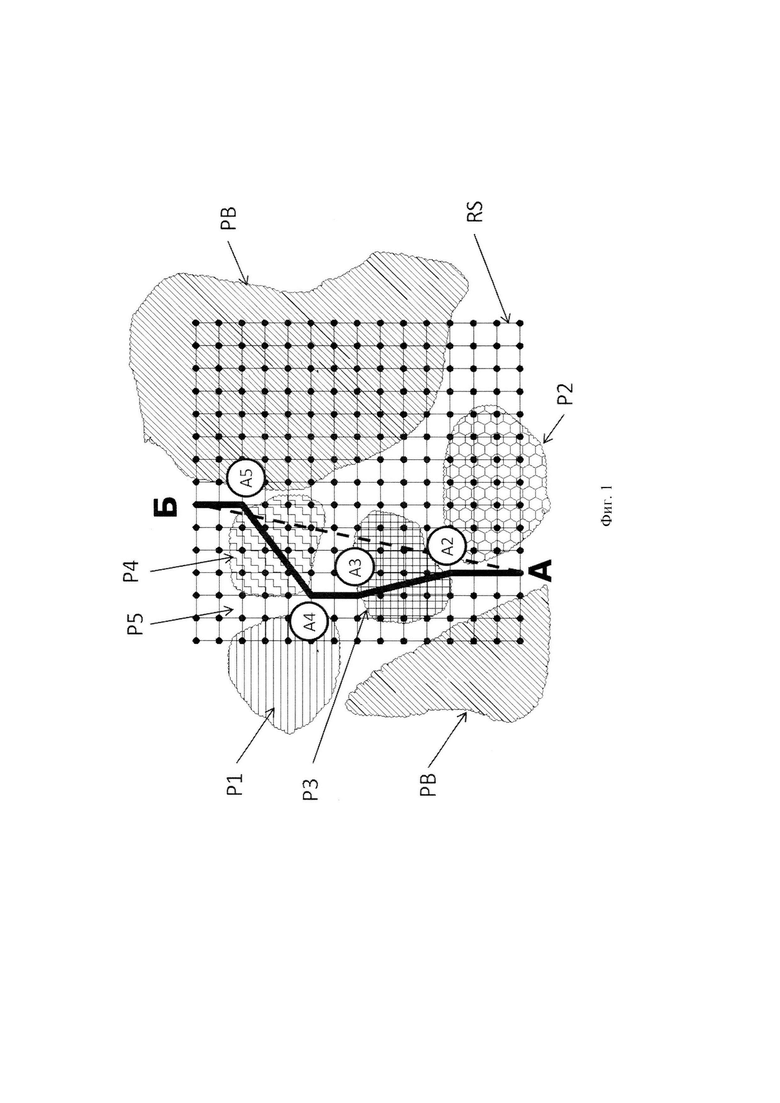
На Фиг. 1 изображен маршрут судна, построенный с применением способа,
На Фиг. 2 - отрезки участка маршрута между двумя узлами расчетной координатной сетки, в которых формируются параметры маневрирования (курсовой угол и скорость судна),
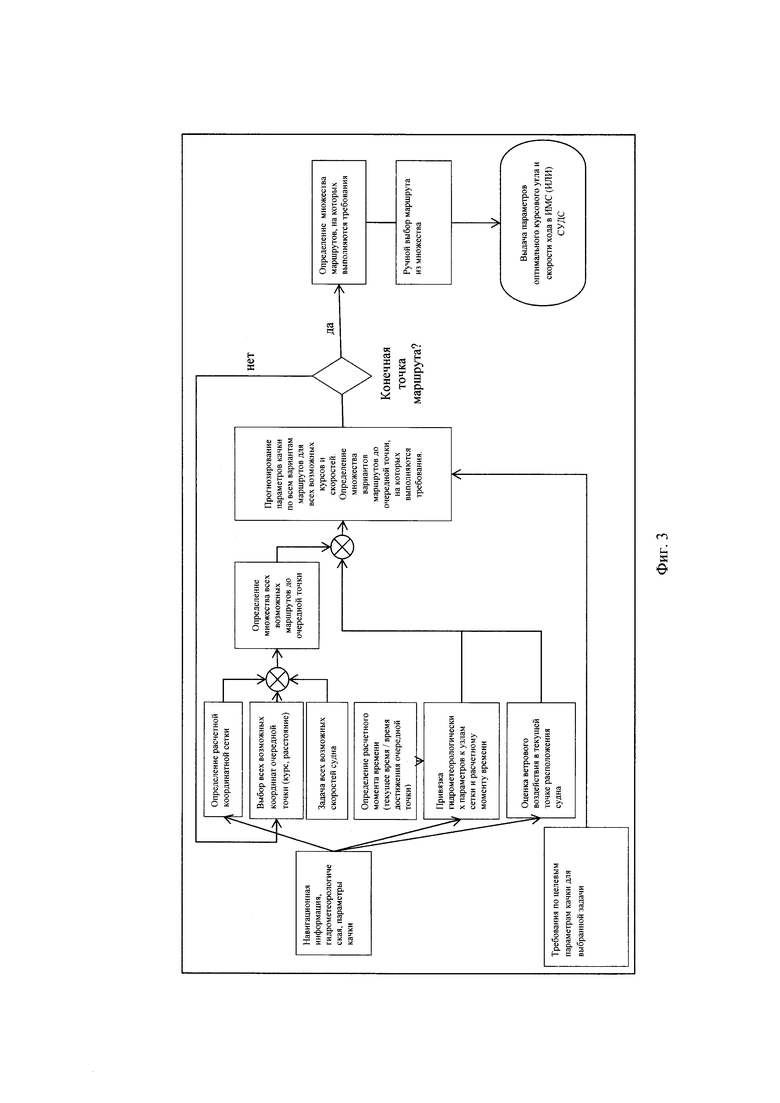
На Фиг. 3 - схема шагов примера реализации способа,
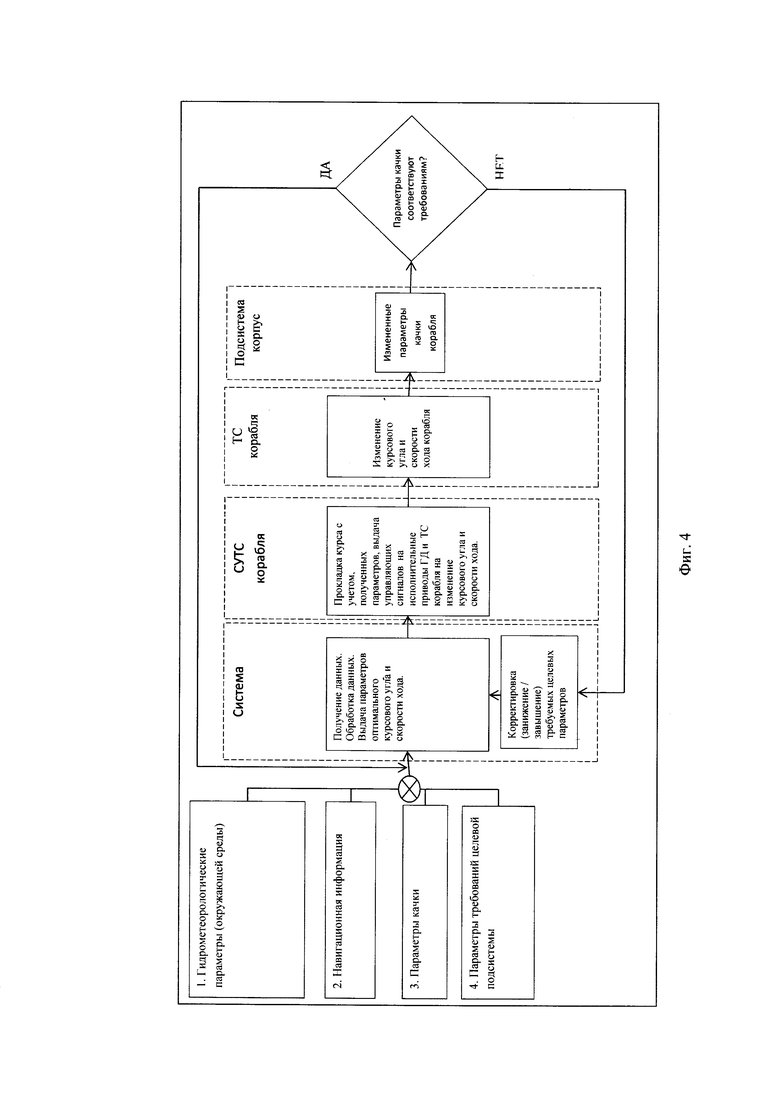
На Фиг. 4 - схема применения системы, реализующей способ с оптимизацией, при управлении движением судна,
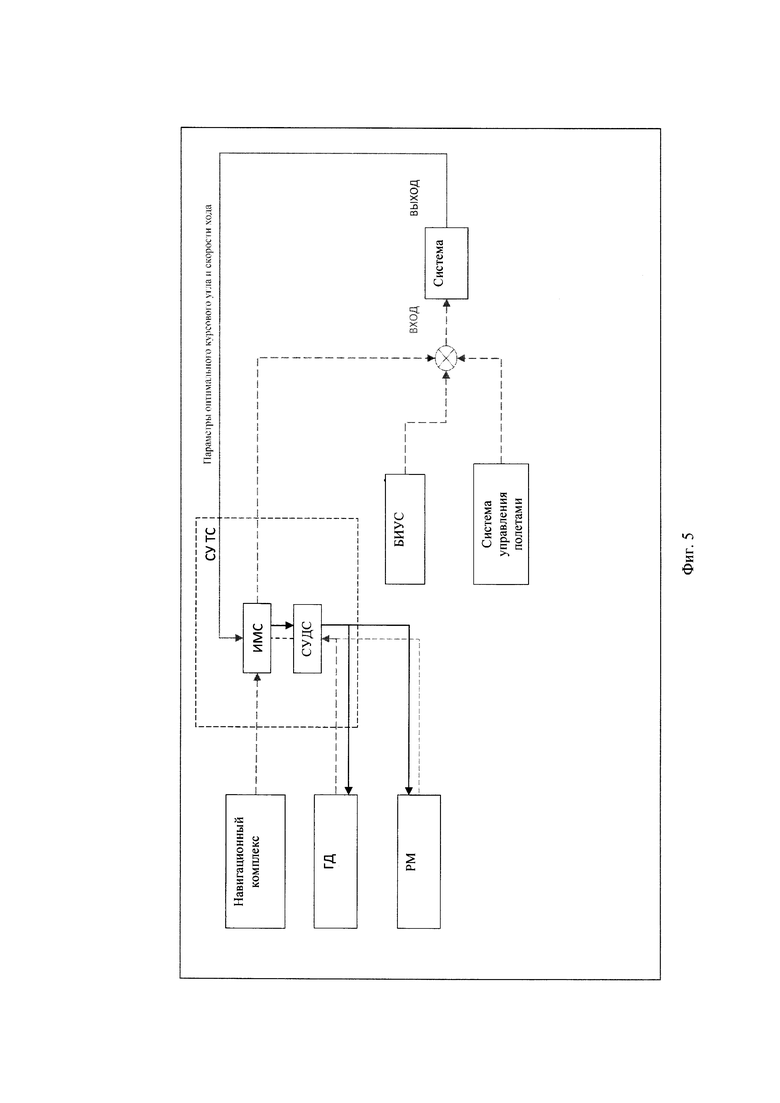
На Фиг. 5 - схема передачи данных и сигналов при эксплуатации системы,
На Фиг. 6 - пример реализации системы для установки на судне,
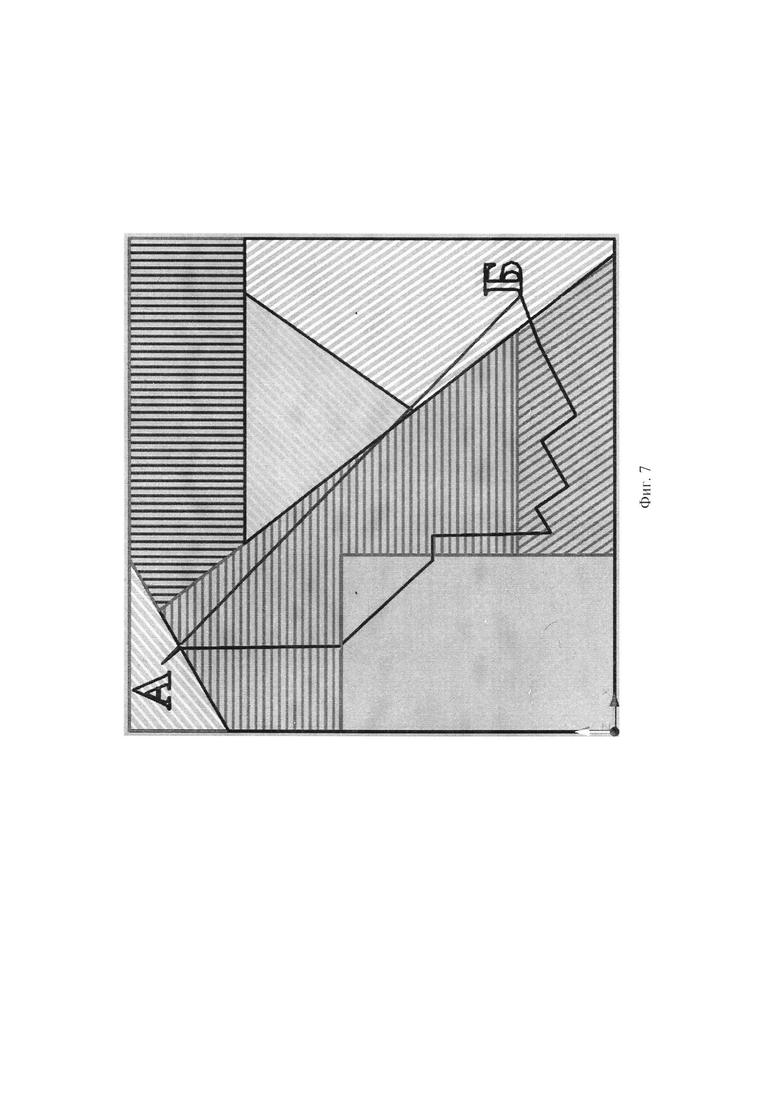
На Фиг. 7 - пример визуализации района плавания и вариантов маршрута при выводе на дисплей автоматизированного рабочего места,
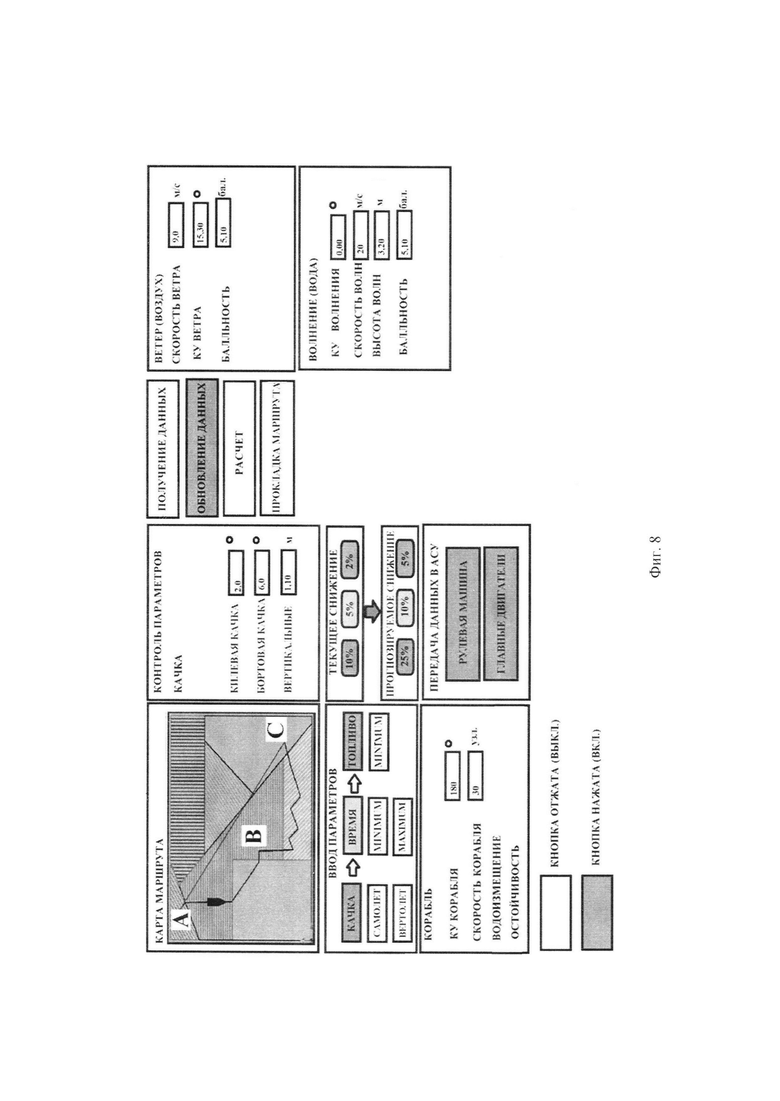
На Фиг. 8 - пример диалогового окна бортовой системы.
На представленных иллюстрациях приняты следующие обозначения:
А, Б - точки маршрута судна.
В скобках ниже указаны параметры: Курсовой угол, Скорость волны, Длина волны, Высота волны.
РВ - область берега,
Р1 - область волнения с параметрами (135, 10, 20, 10),
Р2 - область волнения с параметрами (60, 30, 15, 7),
Р3 - область волнения с параметрами (30; 15; 150; 5,0),
Р4 - область волнения с параметрами (10; 19; 240; 6),
Р5 - область волнения с параметрами (0; 0; 0; 0),
RS - расчетная координатная сетка,
Sm1 - участок изменения скорости со скорости предшествующего маневра на скорость «режима»,
Sm2 - участок изменения скорости со скорости «режима» на скорость очередного маневра,
СУ ТС - системы управления и контроля техническими средствами,
ИМС - интегральная мостиковая система,
СУДС - служба управлением движения судов, управляет работой главного двигателя и рулевой машины,
ГД - главный двигатель,
РМ - рулевая машина,
БИУС - боевая информационно-управляющая система, передающая данные о требованиях, соответствующие выполняемой задаче,
Система управления полетами - система, передающая данные о требованиях, соответствующие выполняемым полетам или связанным задачам,
Система - заявленная система реализующая способ по изобретению.
На иллюстрации Фиг. 1 приведен пример результата применения способа - проложенный маршрут для судна.
Параметры судна (водоизмещение, главные размерения):
D=100000 т
L=300 м (длина судна по эксплуатационной осадке)
В=35 м
Т=12 м
коэффициент общей полноты δ=0,79
Vmax=30 узлов
Поставлена задача пройти по пути между точками А-Б с возможностью обеспечения удержания требуемого целевого параметра, а именно - качки, в пределах:
- килевой не более 2 градусов,
- бортовой не более 3 градусов,
- вертикальные перемещения - без ограничений, на всем маршруте.
Полученные требования об областях прокладки маршрута и данные метеоразведки показали, что в области движения судна существуют области со следующими параметрами (курсовой угол, скорость волны, длина волны, высота волны):
1) Области суши (берега) - РВ, с присвоенными условными значениями параметров «области недопустимой для прокладки маршрута» (0, 0, 100, 100) для исключения данных областей из расчета по прокладке маршрута,
2) Области волнения P1, Р2, Р3, Р4, Р5 со следующими значениями параметров (курсовой угол, скорость волны, длина волны, высота волны)
Р1 - (135; 10; 200; 10)
Р2 - (60; 30; 150; 7)
Р3 - (30; 15; 150; 5)
Р4 - (10; 19; 240; 6)
Р5 - (0; 0; 0; 0)
Для выполнения поставленной задачи по результатам расчетов, выполненных бортовой системой, судну надо пройти по следующим точкам маршрута со следующими параметрами движения - курсового угла к волне и скорости хода:
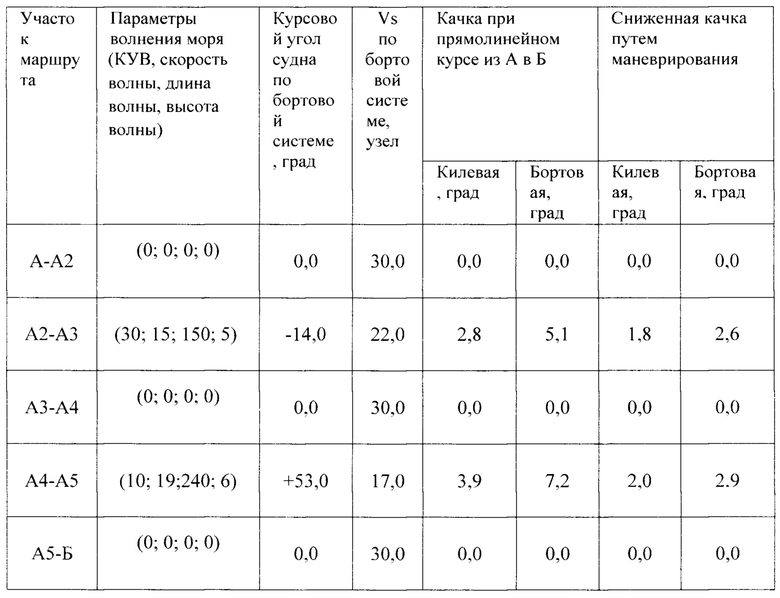
Примечание к таблице:
КУВ, градус - курсовой угол волны:
Скорость волны, м/с
Высота волны, м
Скорость судна Vs, узел.
Таким образом, маневрирование - то есть выбор при управлении движением судна оптимального курсового угла к волне и оптимальной скорости хода на данном примере позволило повысить время и путь судна, для которого обеспечивается снижение килевой и бортовой качки до требуемых параметров (2, 3) на более чем 40% от полной длины маршрута, то есть обеспечиваются технические параметры для безаварийной, рекомендованной эксплуатации целевой техники (например, летательных аппаратов).
Достоверность данных о параметрах окружающей среды от внешних источников на момент их фиксирования или прогноза задается эмпирически по типам источников, и может составлять, например:
1) Спутник - 0,7 (70%)
2) Самолет-разведчик - 0,5 (50%)
3) Волномерный буй - 0,2 (20%)
4) Не специализированный самолет если предназначен передавать такие данные 0,4 (40%)
5) Корабль, который находится или проходит через точку в области прокладки маршрута, 0,8 (80%)
4) Береговой метеопрогноз 0,1 (10%)
На Фиг. 6 изображен пример реализации системы для установки на судне, выполненный в виде автоматизированного рабочего места с пультом управления и дисплеем.
На Фиг. 7 изображен пример визуализации района плавания и вариантов маршрута при выводе на дисплей автоматизированного рабочего места, точками А и Б обозначены начальная и конечная точки маршрута, штриховка обозначает области с различными параметрами волнения. Линиями на данном рисунке изображены прямолинейный маршрут между точками А-Б и оптимальный маршрут, на котором выполнены требования к значениям целевых параметров на маршруте.
На Фиг. 8 изображен пример диалогового окна бортовой системы, выполненной в виде автоматизированного рабочего места с пультом управления и дисплеем. Окно служит для отображения информации о введенных целевых требованиях и полученных данных, для отображения предлагаемого варианта маршрута судна, на котором выполняются целевые требования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональное судно обеспечения морских буровых платформ и комплекс судовой системы грузообработки для применения на многофункциональном судне | 2020 |
|
RU2747109C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОСНОВНЫХ ПАРАМЕТРОВ ОКРУЖАЮЩЕЙ СРЕДЫ ПРИ ДВИЖЕНИИ МОРСКОГО СУДНА | 2017 |
|
RU2670247C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ БАЗИРОВАНИЯ, БОЕВОГО ПРИМЕНЕНИЯ И ТРАНСПОРТИРОВКИ ЦЕЛЕВОЙ ВОЕННОЙ ТЕХНИКИ ПРИ ИСПОЛЬЗОВАНИИ С КОРАБЛЕЙ (СУДОВ) | 2014 |
|
RU2605315C2 |
| Каботажное пассажирское судно | 2016 |
|
RU2653906C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ КОМПЛЕКСНЫХ ИЗМЕРЕНИЙ | 2015 |
|
RU2589291C1 |
Группа изобретений относится к области судостроения, в частности к способам автоматизированного управления движением судна на морском волнении с целью снижения килевой и бортовой качки до требуемых значений (по использованию специальной техники, а также технических средств судна) и системам информационной поддержки при прокладке оптимального курса и выбора оптимальной скорости хода при управлении движением судна (корабля). Изобретение обеспечивает возможность поддержания параметров бортовой и килевой качки судна (корабля) при его движении на морском волнении в требуемых пределах, допустимых для выполнения различных работ (операций) на море. Повышается автоматизация управления движением судна, при котором достигается выполнение требований по поддержанию целевых параметров движения судна, в том числе килевой и бортовой качки судна, а также вертикальных перемещений, в заданных пределах, допустимых для выполнения требуемой задачи судна, за счет автоматизированного определения маршрута (параметров курса и скорости хода) на отдельных участках, при одновременном повышении эффективности способа. 3 н. и 6 з.п. ф-лы, 8 ил., 1 табл.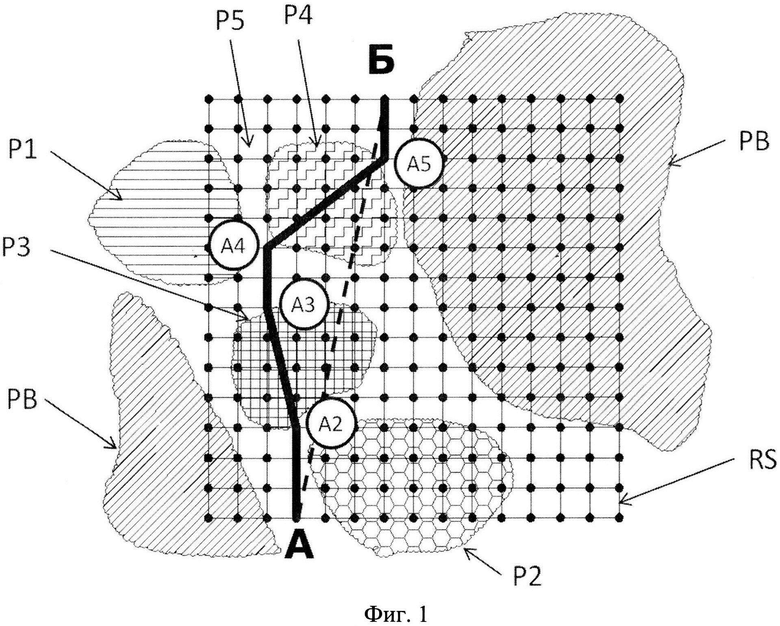
1. Способ автоматизированного управления движением судна на морском волнении с целью снижения бортовой и килевой качки, при котором,
используя, по меньшей мере, одно электронное средство вычислительной техники, которое реализует команды, заранее записанные на машиночитаемом носителе информации и содержащие правила ввода, обработки и вывода данных средством вычислительной техники,
получают данные о требованиях к значениям целевых параметров движения судна, а также к значениям амплитуд килевой, бортовой качки и вертикальных перемещений судна,
получают данные о требованиях к области прокладки маршрута,
получают данные о параметрах судна:
1) длина, ширина, геометрия корпуса судна,
2) данные о нагрузке масс: водоизмещение, координаты центра тяжести,
3) параметры текущей посадки судна и начальной остойчивости,
4) результаты модельных и натурных мореходных испытаний судна: параметры качки судна при определенных параметрах волнения, курсовых углах и скоростях, параметрах движения судна и параметрах судна: осадка, координаты центра тяжести,
5) данные мореходных испытаний: расчетные и экспериментальные данные о буксировочном сопротивлении судна, демпфировании бортовой качки, потере скорости хода в условиях волнения заданной интенсивности,
6) результаты буксировочных, самоходных и маневренных испытаний по определению буксировочного сопротивления судна, коэффициентов взаимодействия движительного комплекса с корпусом судна и характеристик управляемости, устойчивости на курсе и параметров циркуляции судна,
7) статистические данные по реальному поведению судна и его параметрам качки в зоне, где судно уже проходило эксплуатацию,
получают данные о следующих параметрах судна: координаты судна, курс и скорость судна, характерные амплитуды вертикальных и угловых перемещений (килевой и бортовой качки), скоростей и ускорений, а также периодов качки судна,
выполняют построение координатной расчетной сетки, определяя координаты узлов сетки, при этом одному из узлов сетки присваивают координаты судна в его текущем положении, направление сетки принимают соответствующим текущему курсу судна, а форму ячейки сетки принимают в виде квадрата,
после определения координат узлов сетки выполняют привязку полученных данных о требованиях к области прокладки маршрута к узлам сетки,
в виде многомерных числовых массивов получают от доступных источников данные о параметрах окружающей среды в предполагаемой области прокладки маршрута с привязкой к координатам и определенным моментам времени: фиксирования и/или прогноза значений параметров,
при этом параметры окружающей среды, по меньшей мере, содержат следующие данные:
1) направление волны,
2) скорость волны,
3) высота волны,
4) длина волны,
выполняют определение значений параметров окружающей среды в узлах сетки на расчетный момент времени путем привязки полученных данных о параметрах окружающей среды от источников к координатам узлов сетки и текущему расчетному моменту времени,
для узлов сетки, которые находятся внутри области с границей, проходящей по точкам с известными по данным источников значениями параметров, определяют значения параметров путем аппроксимации по точкам с известными параметрами,
возможный вид аппроксимации функции изменения параметров реализуется в виде степенных рядов по формуле:
(а+ПарN)n, где
а - константа, определяемая путем применения типового математического аппарата,
n=1…5 - степень бинома, чем выше, тем точнее аппроксимация,
ПapN - один из видов параметров: курсовой угол волны, скорость волны, длина волны или высота волны,
за расчетный момент времени при определении прогнозных значений параметров для первого участка маршрута принимается текущий момент времени, а для последующих участков маршрута - момент времени достижения судном очередной точки в узле сетки предшествующего участка,
при этом определение прогнозных значений параметров в узлах сетки на расчетный момент времени осуществляют, используя векторное сложение значений направления и скорости волны и кинетических энергий в узлах сетки, тем самым получают векторное поле общего волнового потока и поле распределения энергий, по которым определяют значения параметров окружающей среды: направление и скорость волны, высота и длина волны, в узлах сетки на текущий или иной расчетный момент времени,
по формулам:
векторная сумма скоростей
 ,
,
суммарная кинетическая энергия
 , где
, где
i - номер узла сетки
Vi - скорость волны в i-ом узле сетки,
V∑ - прогнозные значения скорости суммарного волнового потока в расчетный момент времени в заданном узле сетки, по которому определяют скорость и курсовой угол волны в расчетный момент времени в заданном узле сетки,
mi - присвоенное значение массы водного объема волны в i-ом узле сетки, рассчитываемое по известным высоте и длине волны в i-ом узле сетки,
Ei - энергия волны в i-ом узле сетки,
Е∑ - прогнозные значения энергии волны в расчетный момент времени в заданном узле сетки, по которым определяют прогнозные значения высоты и длины волны в расчетный момент времени в заданном узле сетки,
причем узлам сетки, в которых параметры окружающей среды не были определены в результате привязки данных о параметрах к узлам сетки и при определении прогнозных значений параметров на требуемый расчетный момент времени, присваивают статус точек недопустимых для прокладки маршрута судна,
в узлах сетки, на которые на расчетный момент времени нет влияния параметров от других узлов, значения параметров принимаются равными их значениям на предыдущий расчетный момент времени,
определяют все возможные варианты маршрутов судна по узлам сетки и параметров движения судна: курс и скорость судна, на участках маршрута, при которых может быть обеспечено выполнение заданных требований,
при этом задают параметры начальной точки маршрута, причем за начальную точку принимают точку узла сетки, соответствующую положению судна на текущий момент времени,
причем для каждой очередной точки маршрута определяют все возможные ее координаты из числа всех допустимых точек в узлах сетки, расположенных в допустимой для прокладки маршрута области, до которых возможно проложить прямолинейный маршрут,
с учетом требований по области прокладки маршрута и с учетом недопустимых областей, в которых не были определены данные о параметрах окружающей среды ни в результате привязки полученных данных к узлам сетки, ни в результате определения прогнозных значений параметров окружающей среды в расчетный момент времени, когда судно достигло предшествующей точки маршрута,
определяют множество курсов судна до всех возможных координат очередной точки маршрута,
задают в расчет все возможные из допустимых скоростей движения судна «на режиме» на участке маршрута до очередной точки с шагом в один узел: от «0» до максимальной скорости хода судна,
определяют время достижения судном очередной точки на участке маршрута,
для всех определенных ранее вариантов курсов и всех вариантов скоростей судна, с учетом прогнозных значений параметров окружающей среды в предшествующей точке на расчетный момент ее достижения судном, определяемых как описано выше по данным от источников и уже имеющимся данным о присвоенных расчетных прогнозных значениях параметров в узлах сетки, определяют значения прогнозных целевых требуемых параметров, в том числе параметров качки судна, на участках маршрута от предшествующей точки ко всем возможным вариантам очередной точки,
из полученного множества маршрутов до очередной точки и параметров движения судна на них (курс, скорость, координаты очередной точки) выбирают подмножество маршрутов с соответствующими им параметрами движения судна на них, при которых выполняются все заданные целевые требования,
для определения следующей очередной точки для каждого из выбранных подмножеств маршрутов и соответствующих им параметров движения судна (курс, скорость, координаты очередной точки) повторяют шаги способа,
начиная с обработки имеющихся данных о параметрах окружающей среды, которыми могут являться вновь полученные данные от источников и последние расчетные прогнозные значения параметров окружающей среды на предшествующий расчетный момент времени,
и заканчивая построением всех возможных маршрутов, на которых выполняются все заданные требования,
причем при получении каких-либо новых данных, кроме данных о требованиях к значениям целевых параметров движения судна, повторяют все шаги способа, но с сохранением полученной ранее расчетной координатной сетки, а при получении новых данных о требованиях к значениям целевых параметров движения судна повторяют все шаги способа,
также по всем вариантам маршрутов рассчитывают итоговые значения таких параметров, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после определения всех вариантов маршрутов по точкам сетки и параметров движения на участках между ними выбирают вручную один из вариантов маршрутов и соответствующий ему набор параметров движения судна, наиболее подходящий под задачи эксплуатации судна, принимая во внимание один или несколько из таких параметров маршрутов, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после чего осуществляют управление движением судна по расчетным точкам выбранного маршрута за счет ввода расчетных параметров движения судна в органы управления судном: рулевую машину и главные двигатели, обеспечивающие выполнение заданных параметров движения.
2. Способ автоматизированного управления движением судна на морском волнении с целью снижения бортовой и килевой качки, при котором,
используя, по меньшей мере, одно электронное средство вычислительной техники, которое реализует команды, заранее записанные на машиночитаемом носителе информации и содержащие правила ввода, обработки и вывода данных средством вычислительной техники,
получают данные о требованиях к значениям целевых параметров движения судна, а также к значениям амплитуд килевой, бортовой качки и вертикальных перемещений судна,
получают данные о требованиях к области прокладки маршрута,
получают данные о параметрах судна:
1) длина, ширина, геометрия корпуса судна,
2) данные о нагрузке масс: водоизмещение, координаты центра тяжести,
3) параметры текущей посадки судна и начальной остойчивости,
4) результаты модельных и натурных мореходных испытаний судна: параметры качки судна при определенных параметрах волнения, курсовых углах и скоростях, параметрах движения судна и параметрах судна: осадка, координаты центра тяжести,
5) данные мореходных испытаний: расчетные и экспериментальные данные о буксировочном сопротивлении судна, демпфировании бортовой качке, потере скорости хода в условиях волнения заданной интенсивности,
6) результаты буксировочных, самоходных и маневренных испытаний по определению буксировочного сопротивления судна, коэффициентов взаимодействия движительного комплекса с корпусом судна и характеристик управляемости, устойчивости на курсе и параметров циркуляции судна,
7) статистические данные по реальному поведению судна и его параметрам качки в зоне, где судно уже проходило эксплуатацию,
получают данные о следующих параметрах судна: координаты судна, курс и скорость судна, характерные амплитуды вертикальных и угловых перемещений (килевой и бортовой качки), скоростей и ускорений, а также периодов качки судна,
выполняют построение координатной расчетной сетки, определяя координаты узлов сетки, при этом одному из узлов сетки присваивают координаты судна в его текущем положении, направление сетки принимают соответствующим текущему курсу судна, а форму ячейки сетки принимают в виде квадрата,
после определения координат узлов сетки выполняют привязку полученных данных о требованиях к области прокладки маршрута к узлам сетки,
в виде многомерных числовых массивов получают от доступных источников данные о параметрах окружающей среды в предполагаемой области прокладки маршрута с привязкой к координатам и определенным моментам времени: фиксирования и/или прогноза значений параметров,
при этом параметры окружающей среды, по меньшей мере, содержат следующие данные:
1) направление волны,
2) скорость волны,
3) высота волны,
4) длина волны,
выполняют определение значений параметров окружающей среды в узлах сетки на расчетный момент времени путем привязки полученных данных о параметрах окружающей среды от источников к координатам узлов сетки и текущему расчетному моменту времени,
для узлов сетки, которые находятся внутри области с границей, проходящей по точкам с известными по данным источников значениями параметров, определяют значения параметров путем аппроксимации по точкам с известными параметрами,
возможный вид аппроксимации функции изменения параметров реализуется в виде степенных рядов по формуле:
(a+ПарN)n, где
а - константа, определяемая путем применения типового математического аппарата,
n=1…5 - степень бинома, чем выше, тем точнее аппроксимация,
ПарN - один из видов параметров: курсовой угол волны, скорость волны, длина волны или высота волны,
за расчетный момент времени при определении прогнозных значений параметров для первого участка маршрута принимается текущий момент времени, а для последующих участков маршрута - момент времени достижения судном очередной точки в узле сетки предшествующего участка,
при этом определение прогнозных значений параметров в узлах сетки на расчетный момент времени осуществляют, используя векторное сложение значений направления и скорости волны и кинетических энергий в узлах сетки, тем самым получают векторное поле общего волнового потока и поле распределения энергий, по которым определяют значения параметров окружающей среды: направление и скорость волны, высота и длина волны, в узлах сетки на текущий или иной расчетный момент времени,
по формулам:
векторная сумма скоростей
 ,
,
суммарная кинетическая энергия
 , где
, где
i - номер узла сетки
Vi - скорость волны в i-ом узле сетки,
V∑ - прогнозные значения скорости суммарного волнового потока в расчетный момент времени в заданном узле сетки, по которому определяют скорость и курсовой угол волны в расчетный момент времени в заданном узле сетки,
mi - присвоенное значение массы водного объема волны в i-ом узле сетки, рассчитываемое по известным высоте и длине волны в i-ом узле сетки,
Ei - энергия волны в i-ом узле сетки,
E∑ - прогнозные значения энергии волны в расчетный момент времени в заданном узле сетки, по которым определяют прогнозные значения высоты и длины волны в расчетный момент времени в заданном узле сетки,
причем узлам сетки, в которых параметры окружающей среды не были определены в результате привязки данных о параметрах к узлам сетки и при определении прогнозных значений параметров на требуемый расчетный момент времени, присваивают статус точек, недопустимых для прокладки маршрута судна,
в узлах сетки, на которые на расчетный момент времени нет влияния параметров от других узлов, значения параметров принимаются равными их значениям на предыдущий расчетный момент времени,
определяют все возможные варианты маршрутов судна по узлам сетки и параметров движения судна: курс и скорость судна, на участках маршрута, при которых может быть обеспечено выполнение заданных требований,
при этом задают параметры начальной точки маршрута, причем за начальную точку принимают точку узла сетки, соответствующую положению судна на текущий момент времени,
причем для каждой очередной точки маршрута определяют все возможные ее координаты из числа всех допустимых точек в узлах сетки, расположенных в допустимой для прокладки маршрута области, до которых возможно проложить прямолинейный маршрут,
с учетом требований по области прокладки маршрута и с учетом недопустимых областей, в которых не были определены данные о параметрах окружающей среды ни в результате привязки полученных данных к узлам сетки, ни в результате определения прогнозных значений параметров окружающей среды в расчетный момент времени, когда судно достигло предшествующей точки маршрута,
определяют множество курсов судна до всех возможных координат очередной точки маршрута,
задают в расчет все возможные из допустимых скоростей движения судна «на режиме» на участке маршрута до очередной точки с шагом в один узел: от «0» до максимальной скорости хода судна,
определяют время достижения судном очередной точки на участке маршрута,
для всех определенных ранее вариантов курсов и всех вариантов скоростей судна, с учетом прогнозных значений параметров окружающей среды в предшествующей точке на расчетный момент ее достижения судном, определяемых как описано выше по данным от источников и уже имеющимся данным о присвоенных расчетных прогнозных значениях параметров в узлах сетки, определяют значения прогнозных целевых требуемых параметров, в том числе параметров качки судна, на участках маршрута от предшествующей точки ко всем возможным вариантам очередной точки,
из полученного множества маршрутов до очередной точки и параметров движения судна на них (курс, скорость, координаты очередной точки) выбирают подмножество маршрутов с соответствующими им параметрами движения судна на них, при которых выполняются все заданные целевые требования,
для определения следующей очередной точки для каждого из выбранных подмножеств маршрутов и соответствующих им параметров движения судна (курс, скорость, координаты очередной точки) повторяют шаги способа,
начиная с обработки имеющихся данных о параметрах окружающей среды, которыми могут являться вновь полученные данные от источников и последние расчетные прогнозные значения параметров окружающей среды на предшествующий расчетный момент времени,
и заканчивая построением всех возможных маршрутов, на которых выполняются все заданные требования,
причем при получении каких-либо новых данных, кроме данных о требованиях к значениям целевых параметров движения судна, повторяют все шаги способа, но с сохранением полученной ранее расчетной координатной сетки, а при получении новых данных о требованиях к значениям целевых параметров движения судна повторяют все шаги способа,
также по всем вариантам маршрутов рассчитывают итоговые значения таких параметров, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после определения всех вариантов маршрутов по точкам сетки и параметров движения на участках между ними выбирают вручную один из вариантов маршрутов и соответствующий ему набор параметров движения судна, наиболее подходящий под задачи эксплуатации судна, принимая во внимание один или несколько из таких параметров маршрутов, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после чего осуществляют управление движением судна по расчетным точкам выбранного маршрута за счет ввода расчетных параметров движения судна в органы управления судном: рулевую машину и главные двигатели, обеспечивающие выполнение заданных параметров движения,
при этом сравнивают прогнозные и фактические значения целевых параметров на участке маршрута и при выявлении отклонений фактических значений целевых параметров, в том числе параметров качки судна, как в большую, так и в меньшую сторону от прогнозных значений этих параметров на участке маршрута, выполняют оптимизацию путем соответственно занижения или повышения требований к значениям целевых параметров и повторения шагов способа с учетом измененных требований для перестроения маршрута, начиная с очередной точки маршрута, построенного изначально.
3. Способ автоматизированного управления движением судна на морском волнении по любому из пп. 1 или 2, при котором длину стороны квадрата ячейки координатной расчетной сетки определяют по формуле:
LВклетки=K⋅Lволны/Lсудна, где
LВклетки - длина стороны квадрата ячейки сетки в длинах судна,
K - эмпирический коэффициент, связывающий длину волны с длиной судна при текущей эксплуатационной осадке, принимаемый для судов длиной до 100 метров - 120, а для судов длиной больше 400 метров - 180,
Lволны - длина типовой волны в районе плавания при максимально допустимом волнении для целевых задач применения судна, определенная, например, в атласе волнения «Ветер и волны в океанах и морях. Справочные данные» по заданному району плавания,
Lсудна - длина судна по текущей эксплуатационной осадке.
4. Способ автоматизированного управления движением судна на морском волнении по любому из пп. 1 или 2, при котором привязку к узлам сетки областей, недопустимых или обязательных для прокладки маршрута, осуществляют путем построения огибающей вдоль границ таких областей по координатам ближайших узлов сетки, в сторону увеличения площади для недопустимых областей и в сторону уменьшения площади для обязательных областей,
а привязку точек, недопустимых или обязательных для прокладки маршрута к узлам сетки, выполняют, выбирая ближайший узел сетки к точке, обязательной для прокладки маршрута через нее, а для точки, недопустимой для прокладки маршрута через нее, выбирают ближайший узел сетки и задают недопустимую область с границей, проходящей по четырем ближайшим к выбранному узлу сетки узлам.
5. Способ автоматизированного управления движением судна на морском волнении по любому из пп. 1 или 2, при котором
для определения значений параметров окружающей среды с привязкой к узлам сетки и расчетному моменту времени, привязку данных к узлам сетки с помощью аппроксимации и к расчетному моменту времени, используя векторное сложение значений направления и скорости волны и кинетических энергий в узлах сетки, выполняют отдельно по данным о значениях параметра от каждого источника,
далее для каждого узла данные по каждому параметру окружающей среды от разных источников, пересчитанные в координатах узлов сетки и на один расчетный момент времени, группируют на не противоречащие друг другу по критерию разницы значений не больше чем на 20% от наименьшего в группе,
далее из групп данных для последующей обработки выбирают ту группу, которая имеет в сумме большую достоверность на расчетный момент времени,
при этом по каждому источнику данных о параметрах окружающей среды задают достоверность предоставляемых им значений параметров на момент их фиксирования или прогноза,
а достоверность прогнозных значений параметров на требуемый расчетный момент времени по данным одного источника определяют как отношение достоверности источника данных на момент фиксации или прогноза данных к количеству часов, определяемому как разница между расчетным моментом времени для прогноза и временем фиксации или прогноза данных от источника, по формуле:
Dpмв=Dмвд/(Kt⋅(Tpмв-Тмвд)), где
Dpмв - достоверность прогнозных значений параметра на расчетный момент времени,
Dмвд - достоверность значений параметра от источника данных на момент времени их фиксирования или прогноза,
Трмв - значение расчетного момента времени, в часах,
Тмвд - значение момента времени фиксирования или прогноза значений параметра источником данных, в часах,
Kt - коэффициент, равный «1», если Трмв>Тмвд, и равный «- 1», если Трмв<Тмвд,
а достоверность группы данных о значениях одного параметра от разных источников на расчетный момент времени определяют как сумму достоверностей данных от каждого источника на расчетный момент времени,
для каждого узла сетки присваивают значение параметра окружающей среды на текущий расчетный момент времени как усредненное значение по значениям параметра из выбранной группы,
причем для присвоенных прогнозных значений определяют достоверность на текущий расчетный момент времени как сумму достоверностей данных о параметре из выбранной группы,
и используют достоверность присвоенных прогнозных значений для определения очередной достоверной группы данных в случае получения новых данных о параметрах окружающей среды.
6. Способ автоматизированного управления движением судна на морском волнении по любому из пп. 1 или 2, при котором время достижения судном очередной точки на участке маршрута определяют по известным или вычисляемым расстояниям между узлами сетки и заданным скоростям судна «на режиме», а также по получаемым данным о параметрах, характеристиках и результатах испытаний судна: максимальной допустимой скорости судна, соответствующей углу маневра, который необходимо выполнить в узле сетки для перехода на очередной участок маршрута, максимальным допустимым значениям ускорения и торможения судна при движении на прямолинейном участке маршрута, по формуле:
Т=tм1+tреж+tм2, где
Т - время достижения судном очередной точки маршрута,
tм1 - время на участке изменения скорости маневра в предшествующей точке на скорость режима на участке маршрута,
tм2 - время на участке изменения скорости режима на участке маршрута на максимально допустимую скорость очередного маневра,
tреж - время на участке маршрута, проходимом со скоростью режима,
при этом
tм1 определяют по формуле
tм1=(Vман1-Vреж)/а, где
Vман1 - максимально допустимая скорость судна на участке выполнения маневра в предшествующей точке,
Vреж - заданная скорость движения судна на режиме,
а - максимально допустимое ускорение или торможение судна,
tм2 определяют по формуле
tм2=(Vреж-Vман2)/а, где
Vреж - заданная скорость движения судна на режиме,
Vман2 - максимально допустимая скорость судна на участке выполнения маневра в очередной точке,
а - максимально допустимое ускорение или торможение судна,
tреж определяют по формуле
tреж=Sреж/Vреж, где
Sреж - длина участка маршрута, проходимого со скоростью режима без ускорения,
Vреж - заданная скорость режима на участке маршрута,
Sреж определяют как
Sреж=Sуч-Sм1-Sм2, где
Sуч - известное общее расстояние участка маршрута между узлами сетки,
Sм1 - длина участка изменения скорости со скорости маневра на предшествующей точке на скорость режима, вычисляемая как
Sм1=a⋅(tм1)2/2,
Sм2 - длина участка изменения скорости со скорости режима на скорость маневра на очередной точке, вычисляемая как
Sм2=a⋅(tм2)2/2.
7. Способ автоматизированного управления движением судна на морском волнении по любому из пп. 1 или 2, при котором для определения прогнозных параметров качки судна на участке маршрута используют известную методику при условиях:
- судно движется при неработающих рулях, то есть от предшествующей точки к очередной точке в данной модели курсовой угол меняется один раз - в начале;
- скорость хода судна и курсовой угол волны постоянны (на выбранном участке маршрута);
- волнение имеет трехмерный характер;
- величина скорости хода соответствует числу Фруда от Fr=0,0 до Fr=0,3;
- бортовая качка определяется в предположении о линейности диаграммы статической остойчивости,
при этом из шести видов колебаний судна под действием волн рассматриваются три: бортовая и килевая качка и вертикальные перемещения, для определения которых используют следующие уравнения:
- бортовая качка

- вертикальные перемещения
- килевая качка
- в уравнении (1) nθ - собственный период бортовой качки судна,
- В44 - безразмерный коэффициент демпфирования бортовой качки, зависящий от амплитуды колебания θ, эта зависимость принимается по данным эксперимента из материалов мореходных испытаний судна,
в уравнениях (2) и (3) коэффициенты Bij и Сij представлены в виде двух слагаемых: при нулевой скорости хода и зависящего от скорости хода υ, при этом коэффициенты для нулевой скорости хода принимают равными Bij=Вji и Сij=Сji,
при указанных условиях уравнения (1)-(3) описывают качку судна на волнении, для расчета бортовой качки используют уравнение (1), два других вида качки - вертикальные перемещения и килевая качка - оказываются взаимосвязанными,
расчет статистических характеристик качки судна на нерегулярном волнении выполняют с применением методов спектральной теории качки, при этом в качестве волновых спектров при известных параметрах волнения: высоты волны с обеспеченностью 3% и среднего периода волн, используются спектры Пирсона-Московица или JONSWAP, характерные для района эксплуатации судна.
8. Система автоматизированного управления движением судна на морском волнении,
состоящая из процессора, блока памяти, устройств ввода и вывода данных, блоков, обеспечивающих возможность получения и передачи данных, блока, обеспечивающего возможность подачи питания к системе, средств коммутации, обеспечивающих коммутацию элементов системы между собой,
характеризующаяся тем, что реализована в виде компьютера, содержащего блоки, обеспечивающие возможность получения данных от различных источников, в том числе от системы управления судном, и обеспечивающие возможность передачи данных в различные системы, в том числе передачи управляющих команд или сигналов в систему управления судном, процессор сконфигурирован с возможностью выполнения команд и инструкций о правилах ввода, обработки и вывода данных, содержащихся в блоке памяти, при выполнении которых
получают данные о требованиях к значениям целевых параметров движения судна, а также к значениям амплитуд килевой, бортовой качки и вертикальных перемещений судна,
получают данные о требованиях к области прокладки маршрута,
получают данные о параметрах судна:
1) длина, ширина, геометрия корпуса судна,
2) данные о нагрузке масс: водоизмещение, координаты центра тяжести,
3) параметры текущей посадки судна и начальной остойчивости,
4) результаты модельных и натурных мореходных испытаний судна: параметры качки судна при определенных параметрах волнения, курсовых углах и скоростях, параметрах движения судна и параметрах судна: осадка, координаты центра тяжести,
5) данные мореходных испытаний: расчетные и экспериментальные данные о буксировочном сопротивлении судна, демпфировании бортовой качке, потере скорости хода в условиях волнения заданной интенсивности,
6) результаты буксировочных, самоходных и маневренных испытаний по определению буксировочного сопротивления судна, коэффициентов взаимодействия движительного комплекса с корпусом судна и характеристик управляемости, устойчивости на курсе и параметров циркуляции судна,
7) статистические данные по реальному поведению судна и его параметрам качки в зоне, где судно уже проходило эксплуатацию,
получают данные о следующих параметрах судна: координаты судна, курс и скорость судна, характерные амплитуды вертикальных и угловых перемещений (килевой и бортовой качки), скоростей и ускорений, а также периодов качки судна,
выполняют построение координатной расчетной сетки, определяя координаты узлов сетки, при этом одному из узлов сетки присваивают координаты судна в его текущем положении, направление сетки принимают соответствующим текущему курсу судна, а форму ячейки сетки принимают в виде квадрата,
после определения координат узлов сетки выполняют привязку полученных данных о требованиях к области прокладки маршрута к узлам сетки,
в виде многомерных числовых массивов получают от доступных источников данные о параметрах окружающей среды в предполагаемой области прокладки маршрута с привязкой к координатам и определенным моментам времени: фиксирования и/или прогноза значений параметров,
при этом параметры окружающей среды, по меньшей мере, содержат следующие данные:
1) направление волны,
2) скорость волны,
3) высота волны,
4) длина волны,
выполняют определение значений параметров окружающей среды в узлах сетки на расчетный момент времени путем привязки полученных данных о параметрах окружающей среды от источников к координатам узлов сетки и текущему расчетному моменту времени,
для узлов сетки, которые находятся внутри области с границей, проходящей по точкам с известными по данным источников значениями параметров, определяют значения параметров путем аппроксимации по точкам с известными параметрами,
возможный вид аппроксимации функции изменения параметров реализуется в виде степенных рядов по формуле:
(a+ПapN)n, где
а - константа, определяемая путем применения типового математического аппарата,
n=1…5 - степень бинома, чем выше, тем точнее аппроксимация,
ПарN - один из видов параметров: курсовой угол волны, скорость волны, длина волны или высота волны,
за расчетный момент времени при определении прогнозных значений параметров для первого участка маршрута принимается текущий момент времени, а для последующих участков маршрута - момент времени достижения судном очередной точки в узле сетки предшествующего участка,
при этом определение прогнозных значений параметров в узлах сетки на расчетный момент времени осуществляют, используя векторное сложение значений направления и скорости волны и кинетических энергий в узлах сетки, тем самым получают векторное поле общего волнового потока и поле распределения энергий, по которым определяют значения параметров окружающей среды: направление и скорость волны, высота и длина волны, в узлах сетки на текущий или иной расчетный момент времени, по формулам:
векторная сумма скоростей
 ,
,
суммарная кинетическая энергия
 , где
, где
i - номер узла сетки,
Vi - скорость волны в i-ом узле сетки,
V∑ - прогнозные значения скорости суммарного волнового потока в расчетный момент времени в заданном узле сетки, по которому определяют скорость и курсовой угол волны в расчетный момент времени в заданном узле сетки,
mi - присвоенное значение массы водного объема волны в i-ом узле сетки, рассчитываемое по известным высоте и длине волны в i-ом узле сетки,
Ei - энергия волны в i-ом узле сетки,
Е∑ - прогнозные значения энергии волны в расчетный момент времени в заданном узле сетки, по которым определяют прогнозные значения высоты и длины волны в расчетный момент времени в заданном узле сетки,
причем узлам сетки, в которых параметры окружающей среды не были определены в результате привязки данных о параметрах к узлам сетки и при определении прогнозных значений параметров на требуемый расчетный момент времени, присваивают статус точек, недопустимых для прокладки маршрута судна,
в узлах сетки, на которые на расчетный момент времени нет влияния параметров от других узлов, значения параметров принимаются равными их значениям на предыдущий расчетный момент времени,
определяют все возможные варианты маршрутов судна по узлам сетки и параметров движения судна: курс и скорость судна, на участках маршрута, при которых может быть обеспечено выполнение заданных требований,
при этом задают параметры начальной точки маршрута, причем за начальную точку принимают точку узла сетки, соответствующую положению судна на текущий момент времени,
причем для каждой очередной точки маршрута определяют все возможные ее координаты из числа всех допустимых точек в узлах сетки, расположенных в допустимой для прокладки маршрута области, до которых возможно проложить прямолинейный маршрут,
с учетом требований по области прокладки маршрута и с учетом недопустимых областей, в которых не были определены данные о параметрах окружающей среды ни в результате привязки полученных данных к узлам сетки, ни в результате определения прогнозных значений параметров окружающей среды в расчетный момент времени, когда судно достигло предшествующей точки маршрута,
определяют множество курсов судна до всех возможных координат очередной точки маршрута,
задают в расчет все возможные из допустимых скоростей движения судна «на режиме» на участке маршрута до очередной точки с шагом в один узел: от «0» до максимальной скорости хода судна,
определяют время достижения судном очередной точки на участке маршрута,
для всех определенных ранее вариантов курсов и всех вариантов скоростей судна, с учетом прогнозных значений параметров окружающей среды в предшествующей точке на расчетный момент ее достижения судном, определяемых как описано выше по данным от источников и уже имеющимся данным о присвоенных расчетных прогнозных значениях параметров в узлах сетки, определяют значения прогнозных целевых требуемых параметров, в том числе параметров качки судна, на участках маршрута от предшествующей точки ко всем возможным вариантам очередной точки,
из полученного множества маршрутов до очередной точки и параметров движения судна на них (курс, скорость, координаты очередной точки) выбирают подмножество маршрутов с соответствующими им параметрами движения судна на них, при которых выполняются все заданные целевые требования,
для определения следующей очередной точки для каждого из выбранных подмножеств маршрутов и соответствующих им параметров движения судна (курс, скорость, координаты очередной точки) повторяют шаги способа,
начиная с обработки имеющихся данных о параметрах окружающей среды, которыми могут являться вновь полученные данные от источников и последние расчетные прогнозные значения параметров окружающей среды на предшествующий расчетный момент времени,
и заканчивая построением всех возможных маршрутов, на которых выполняются все заданные требования,
причем при получении каких-либо новых данных, кроме данных о требованиях к значениям целевых параметров движения судна, повторяют все шаги способа, но с сохранением полученной ранее расчетной координатной сетки, а при получении новых данных о требованиях к значениям целевых параметров движения судна повторяют все шаги способа,
также по всем вариантам маршрутов рассчитывают итоговые значения таких параметров, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после определения всех вариантов маршрутов по точкам сетки и параметров движения на участках между ними выбирают вручную один из вариантов маршрутов и соответствующий ему набор параметров движения судна, наиболее подходящий под задачи эксплуатации судна, принимая во внимание один или несколько из таких параметров маршрутов, как: время в пути на маршруте, длина пути маршрута, сравнительная оценка по расходу топлива на маршруте,
после чего осуществляют управление движением судна по расчетным точкам выбранного маршрута за счет ввода расчетных параметров движения судна в органы управления судном: рулевую машину и главные двигатели, обеспечивающие выполнение заданных параметров движения.
9. Система автоматизированного управления движением судна на морском волнении по п. 8, отличающаяся тем, что реализована в виде автоматизированного рабочего места с пультом и установлена на судне.
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА В УСЛОВИЯХ ЭКСТРЕМАЛЬНОГО ВОЛНЕНИЯ | 2016 |
|
RU2647357C1 |
| Способ управления угловой скоростью судна-катамарана при "сильных" маневрах | 2018 |
|
RU2693403C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| Конвейер для транспортирования стеклоизделий | 1960 |
|
SU140964A1 |
| УСТРОЙСТВО ДЛЯ УМЕРЕНИЯ БОРТОВОЙ КАЧКИ МОРСКИХ СУДОВ С БОЛЬШОЙ ПОПЕРЕЧНОЙ ОСТОЙЧИВОСТЬЮ | 2006 |
|
RU2374124C2 |
| WO 2017119008 А1, 13.07.2017. | |||

