Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного звена.
Известен механизм-сфера, разработанный Ч. Хоберманом [С. Hoberman. Reversibly expandable doubly-curved truss structure. US Patent No. 4942700, 1990, Fig. 13-16], который имеет возможность трансформирования из разложенного состояния в сложенное и обратно, изменяя размеры сферы. Механизм включает шесть больших кинематических цепей, расположенных на поверхности сферы и образованных сопряжением линейных звеньев, соединенными вращательными шарнирами. Механизм-сфера является одноподвижным, в нем входное движение задается единственному звену. Недостатком данного механизма является то, что он не может трансформироваться в плоскую систему.
Наиболее близким к предлагаемому устройству является механизм Саррюса [G. Chen, S. Zhang, G. Li. Multistable behaviors of compliant Sarrus mechanisms. Journal of Mechanisms and Robotics, 2013, Vol. 5, 021005-1, Fig. 1], включающий стойку и выходное звено, соединенные между собой двухзвенными кинематическими цепями, каждая из которых состоит из ведущего и ведомого рычагов равной длины, образующих вращательные шарниры между собой и с выходным звеном и стойкой, причем геометрические оси вращательных шарниров параллельны друг другу. Механизм является одноподвижным, в нем движение задается одному из ведущих рычагов.
Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в том, что в горизонтальной плоскости между двухзвенными кинематическими цепями, сопрягающими выходное звено со стойкой, отсутствуют какие-либо соединительные звенья, обеспечивающие механизму замкнутость. Этот недостаток ограничивает области применения данного механизма.
Техническая проблема, решаемая предлагаемым изобретением, заключается в усовершенствовании конструкции прототипа путем установки соединительных звеньев в горизонтальной плоскости между двухзвенными кинематическими цепями, сопрягающими выходное звено со стойкой.
Данная проблема решается тем, что в известном механизме, включающем стойку и выходное звено, соединенные основными кинематическими цепями, каждая из которых состоит из ведущего и ведомого рычагов равной длины, образующих вращательные шарниры с выходным звеном и стойкой, причем геометрические оси вращательных шарниров параллельны друг другу, согласно изобретению, механизм снабжен промежуточными звеньями, установленными между ведущими и ведомыми рычагами и сопряженными между собой дополнительными кинематическими цепями, выполненными в виде шарнирно соединенных линейных звеньев. Кроме этого, дополнительные кинематические цепи выполнены в виде горизонтально расположенных линейных звеньев, соединенных между собой и промежуточными звеньями вращательными шарнирами с вертикально расположенными параллельными осями.
Кроме этого, дополнительные кинематические цепи выполнены в виде вертикально расположенных линейных звеньев, соединенных между собой и промежуточными звеньями вращательными шарнирами с горизонтально расположенными параллельными осями.
Кроме этого, дополнительные кинематические цепи выполнены в виде линейных звеньев с телескопическими направляющими, причем крайние звенья дополнительных кинематических цепей образуют с промежуточными звеньями вращательные шарниры с вертикально расположенными параллельными осями.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в расширении области его применения и расширении его функциональных свойств за счет введения в его состав интегрированных кинематических цепей, расположенных по периметру.
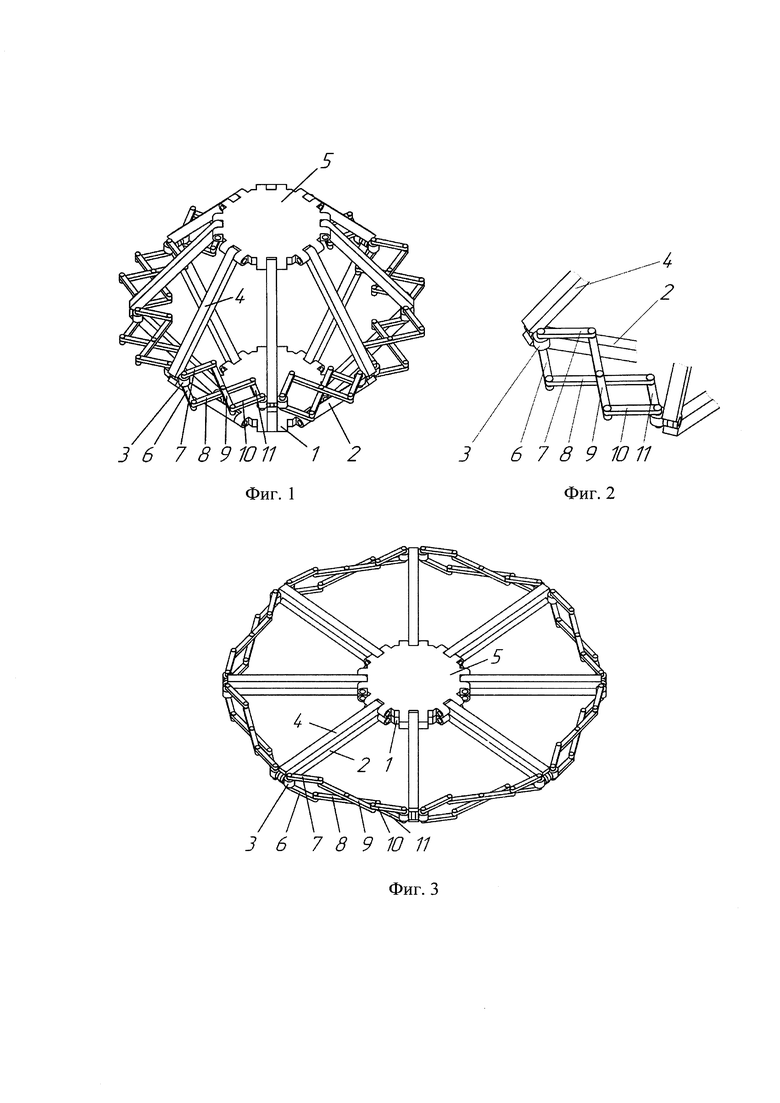
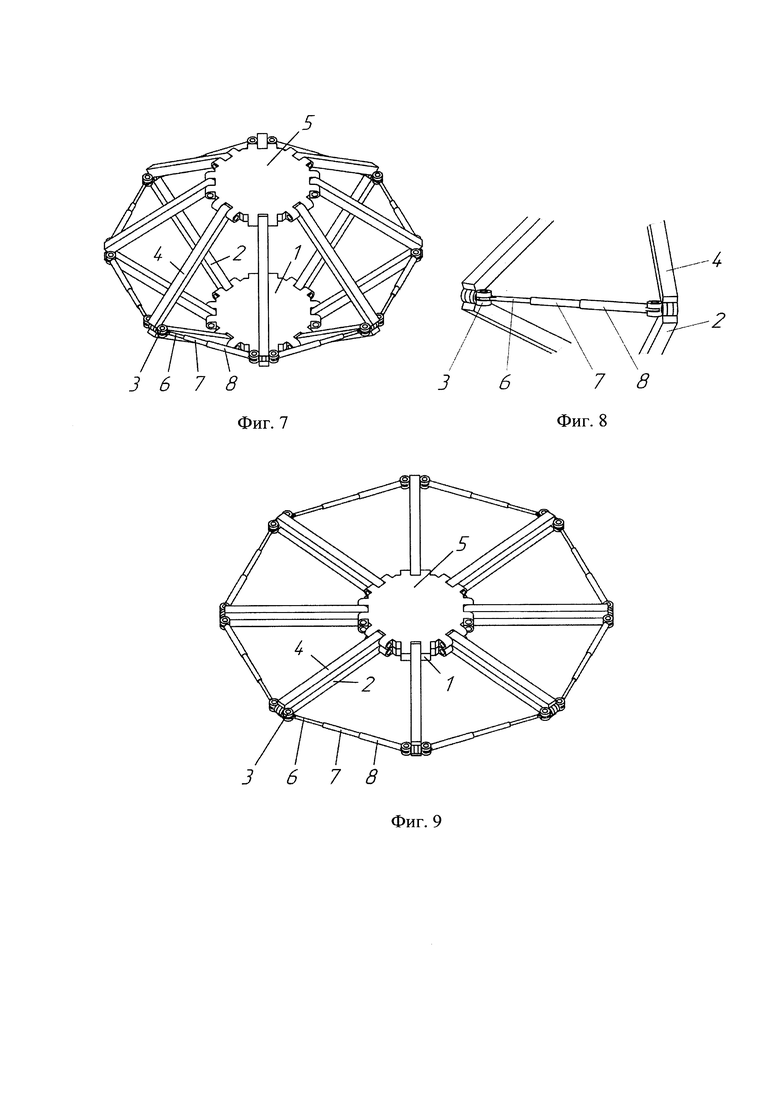
Предлагаемое изобретение поясняется чертежом, где на фиг. 1, 4 и 7 показаны варианты складного механизма в разложенном (пространственном) состоянии, на фиг. 2, 5 и 8 показаны схемы интегрированных кинематических цепей, на фиг. 3, 6 и 9 показаны варианты складного механизма в сложенном (плоском) состоянии.
Предлагаемый механизм включает стойку 1 (неподвижное звено), ведущий рычаг 2, промежуточное звено 3, ведомый рычаг 4 и выходное звено 5. Ведущий рычаг 2 и ведомый рычаг 4 выполнены равной длины и образуют вращательные шарниры со стойкой 1 и выходным звеном 5, при этом геометрические оси данных вращательных шарниров параллельны друг другу. Между ведущими и ведомыми рычагами 2 и 4 установлены промежуточные звенья 3, сопряженные между собой интегрированными кинематическими цепями, выполненными в виде шарнирно соединенных линейных звеньев 6-11. Интегрированные кинематические цепи, приведенные на фиг. 2 и 5, соответствующие схемам механизмов по фиг. 1, 3 и 4, 6, состоят из линейных звеньев 6-11, соединенных между собой вращательными шарнирами. При этом кинематическая цепь на фиг. 2 расположена горизонтально, а кинематическая цепь на фиг. 5 расположена вертикально. Кинематическая цепь, приведенная на фиг. 8, состоит из линейных звеньев 6-8 с телескопическими направляющими, соединенных между собой поступательными шарнирами.
Принцип работы предлагаемого механизма заключается в следующем. При повороте ведущего рычага 2, движение передается на ведомый рычаг 4 и далее на выходное звено 5, которое смещается прямолинейно вертикально вверх или вниз. При этом звенья интегрированных кинематических цепей приводятся в движение одновременно с движением ведущего рычага 2. При движении выходного звена 5 вверх расстояние между промежуточными звеньями сокращается и интегрированные кинематические цепи сдвигаются. При движении выходного звена 5 вниз расстояние между промежуточными звеньями увеличивается и интегрированные кинематические цепи раздвигаются.
Предлагаемое изобретение может быть использовано в качестве встроенного элемента механической системы, которая трансформируется из плоского состояния в пространственное и обратно. Предлагаемое изобретение также может быть применено в качестве отдельного модуля, имеющего возможность изменения формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДНОЙ МЕХАНИЗМ | 2018 |
|
RU2681978C1 |
| ОРИГАМИ МЕХАНИЗМ | 2018 |
|
RU2694704C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| СКЛАДНОЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2720270C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| СКЛАДНАЯ ИНЖЕНЕРНАЯ КОНСТРУКЦИЯ | 2023 |
|
RU2807787C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| ЧЕТЫРЕХПОДВИЖНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2785706C1 |

Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного звена. Складной механизм с интегрированными кинематическими цепями включает стойку и выходное звено, соединенные основными кинематическими цепями, каждая из которых состоит из ведущего и ведомого рычагов равной длины, образующих вращательные шарниры с выходным звеном и стойкой, причем геометрические оси вращательных шарниров параллельны друг другу. Механизм снабжен промежуточными звеньями, установленными между ведущими и ведомыми рычагами и сопряженными между собой дополнительными кинематическими цепями, выполненными в виде шарнирно соединенных линейных звеньев. Обеспечивается расширение области применения и расширение функциональных свойств механизма. 3 з.п. ф-лы, 9 ил.
1. Складной механизм с интегрированными кинематическими цепями, включающий стойку и выходное звено, соединенные основными кинематическими цепями, каждая из которых состоит из ведущего и ведомого рычагов равной длины, образующих вращательные шарниры с выходным звеном и стойкой, причем геометрические оси вращательных шарниров параллельны друг другу, отличающийся тем, что механизм снабжен промежуточными звеньями, установленными между ведущими и ведомыми рычагами и сопряженными между собой дополнительными кинематическими цепями, выполненными в виде шарнирно соединенных линейных звеньев.
2. Механизм по п. 1, отличающийся тем, что дополнительные кинематические цепи выполнены в виде горизонтально расположенных линейных звеньев, соединенных между собой и промежуточными звеньями вращательными шарнирами с вертикально расположенными параллельными осями.
3. Механизм по п. 1, отличающийся тем, что дополнительные кинематические цепи выполнены в виде вертикально расположенных линейных звеньев, соединенных между собой и промежуточными звеньями вращательными шарнирами с горизонтально расположенными параллельными осями.
4. Механизм по п. 1, отличающийся тем, что дополнительные кинематические цепи выполнены в виде линейных звеньев с телескопическими направляющими, причем крайние звенья дополнительных кинематических цепей образуют с промежуточными звеньями вращательные шарниры с вертикально расположенными параллельными осями.
| DE 19840886 C2, 13.03.2003 | |||
| JP 2002295623 A, 09.10.2002 | |||
| ОРИГАМИ МЕХАНИЗМ | 2018 |
|
RU2694704C1 |
| СКЛАДНОЙ МЕХАНИЗМ | 2018 |
|
RU2681978C1 |

