Область техники, к которой относится изобретение
Настоящее изобретение относится к машине для перемещения материалов.
Уровень техники
Известные машины для перемещения материалов, в частности, экскаваторы, содержат рычажный узел для перемещения материалов. Этот рычажный узел может содержать рычаг, известный как стрела и установленный с возможностью поворота вокруг, как правило, горизонтальной оси относительно шасси машины. Другой рычаг, известный как рукоять, может быть присоединен к концу стрелы, дальнему от шасси, с возможностью поворота вокруг, как правило, горизонтальной оси. Инструмент для перемещения материалов, в частности, ковш, может быть установлен на конце рукояти. Стрелу могут поднимать и опускать под управлением первого гидроцилиндра. Рукоять могут перемещать относительно стрелы под управлением второго гидроцилиндра, а ковш могут перемещать относительно рукояти под управлением третьего гидроцилиндра.
Для перемещения материала, например, при выкапывании траншеи, оператор машины должен одновременно управлять всеми тремя гидроприводами, что является сложным процессом. Опытный оператор при выкапывании траншеи может быстро заполнять ковш материалом, поднимать ковш из траншеи и опорожнять ковш с одной или другой стороны от машины. Это время цикла выемки или погрузки грунта в значительной степени зависит от начальной глубины проникновения ковша в грунт. Если ковш слишком глубоко проникает в грунт, то ковш невозможно вынуть через заполняющий грунт. И наоборот, если ковш недостаточно глубоко проникает в грунт, то ковш заполняется только наполовину. Менее опытные операторы обычно выполняют циклы выемки/погрузки грунта более медленно.
В соответствии с этим существует потребность в усовершенствованной машине для перемещения материалов.
Раскрытие сущности изобретения
Согласно настоящему изобретению обеспечен способ управления машиной для перемещения материалов, оснащенной инструментом для перемещения материалов, установленным с возможностью перемещения относительно шасси машины, при этом указанный способ содержит следующие операции:
а) расположение инструмента для перемещения материалов в первой позиции первой области,
б) перемещение инструмента для перемещения материалов во вторую область,
в) обеспечение системы управления для автоматического возвращения инструмента для перемещения материалов в первую область путем его расположения во второй позиции первой области, отличной от первой позиции первой области,
г) возвращение инструмента для перемещения материалов во вторую область.
Первая область может представлять собой область, в которой требуется выкопать траншею. Вторая область может представлять собой область, в которой требуется складывать грунт, вынимаемый из траншеи. Преимущественно на операции а) инструмент располагают в первой области, например, в области, в которой требуется выкопать траншею, но на операции в) инструмент для перемещения материалов располагают в другой позиции в первой области, чем на операции а). Система управления преимущественно автоматически передвигает инструмент для перемещения материалов с некоторым шагом в другую позицию в траншее, способствуя, таким образом, выкапыванию траншеи по мере ее постепенного удлинения. Инструмент для перемещения материалов автоматически помещают непосредственно в следующую последовательную позицию в траншее, поскольку длина траншеи постепенно увеличивается. Различные позиции в траншее, в которых непосредственно устанавливается инструмент для перемещения материалов, по мере постепенного удлинения траншеи могут последовательно приближаться к машине или удаляться от машины. Непосредственное расположение инструмента для перемещения материалов в требуемой позиции в траншее (т. е., инструмент для перемещения материалов не проходит через предыдущую позицию выкапывания) экономит время и способствует более эффективному выкапыванию.
Краткое описание чертежей
Ниже только в качестве примера приведено описание изобретения со ссылками на прилагаемые чертежи, на которых показаны:
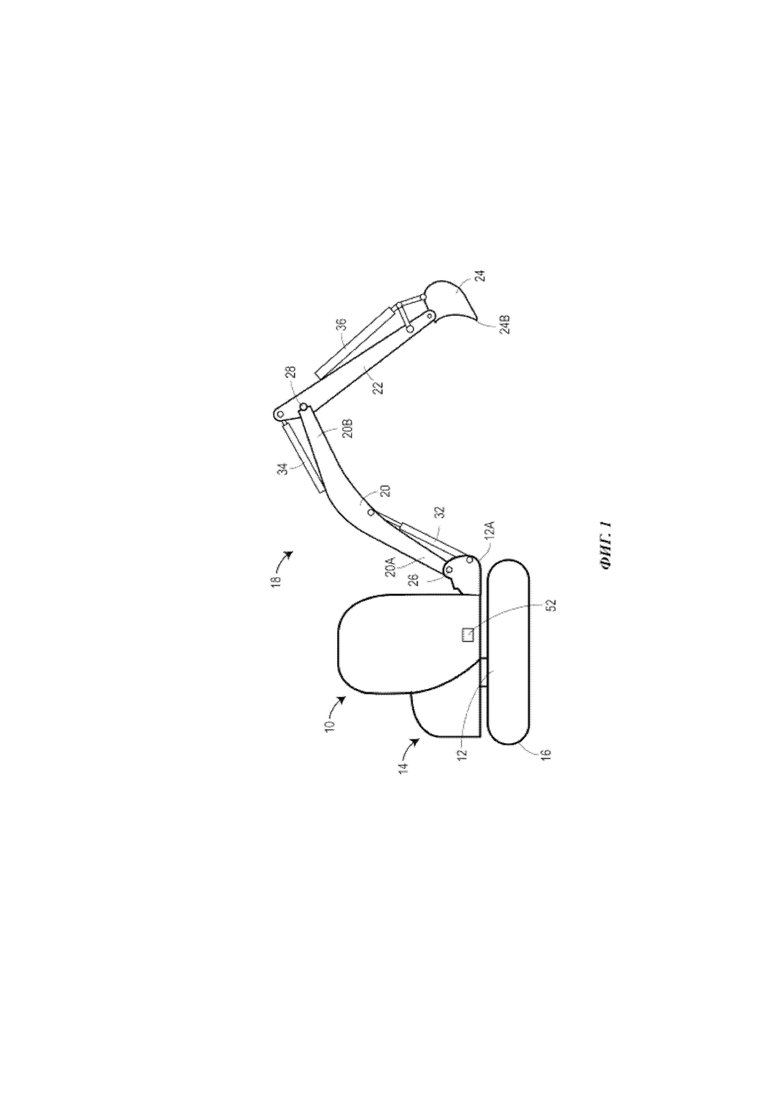
фиг. 1 - схематический вид сбоку машины для перемещения материалов согласно настоящему изобретению,
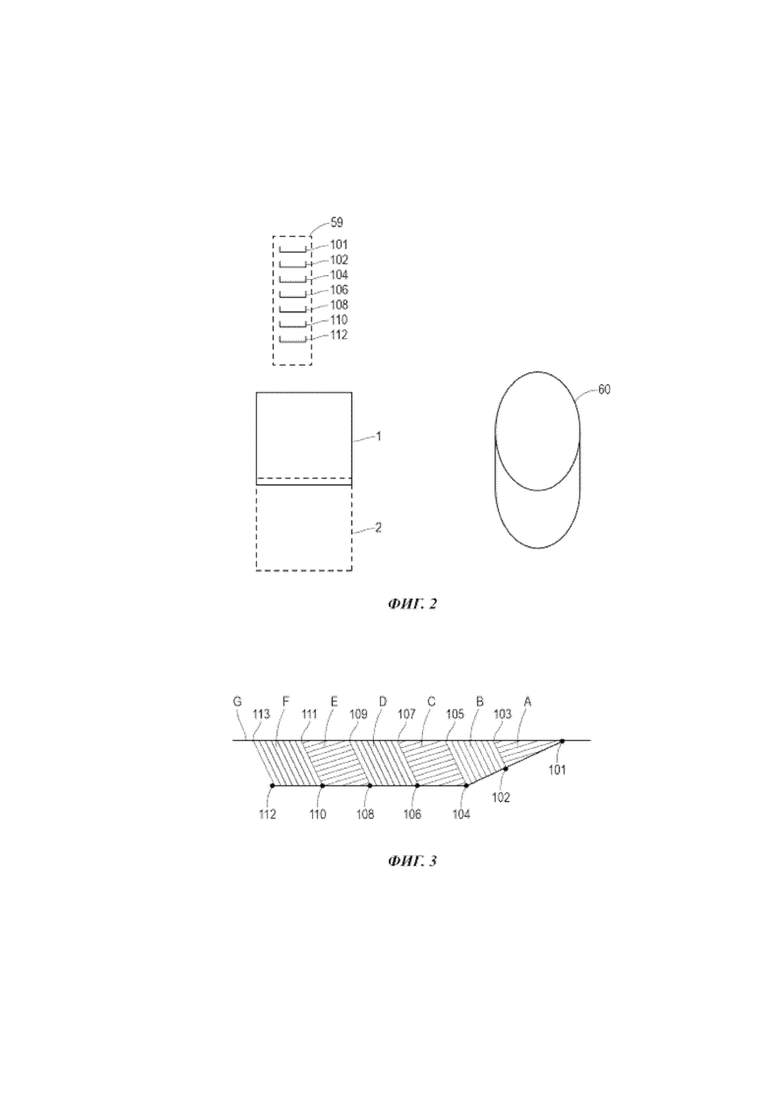
фиг. 2 - схематический вид сверху части машины для перемещения материалов с фиг. 1, и
фиг. 3 - схематический вид сбоку в разрезе траншеи, выкопанной машиной с фиг. 1 способом согласно настоящему изобретению.
Осуществление изобретения
На фиг. 1 и 2 показана машина 10 для перемещения материалов, содержащая шасси 12 и кабину 14 оператора. Кабина оператора установлена на шасси 12. На шасси предусмотрено средство транспортирования, сцепляющееся с землей, в виде пары гусеничных лент 16, предназначенных для движения машины по земле.
К раме кабины 14 присоединен рычажный узел 18, содержащий первый рычаг в виде стрелы 20, второй рычаг в виде рукояти 22 и захватывающий грунт инструмент в виде ковша 24. Первый конец 20A стрелы 20 соединен с возможностью поворота посредством оси 26 поворота с серьгой 12A. Серьга 12A установлена с возможностью поворота на, как правило, вертикальной оси относительно рамы. Ось 26 поворота ориентирована горизонтально. Рукоять прикреплена с возможностью поворота посредством оси 28 поворота ко второму концу 20B стрелы 20. Ось 28 поворота ориентирована горизонтально. Ковш при помощи оси 30 поворота прикреплен с возможностью поворота к концу 22B рукояти 22, удаленному от конца 22A рукояти 22. Ось 30 поворота ориентирована горизонтально.
Первый гидропривод в виде первого гидроцилиндра 32 имеет первый конец 32A, присоединенный с возможностью поворота к раме, и второй конец 32B, присоединенный с возможностью поворота к части стрелы, расположенной между первым и вторым концами стрелы. Второй гидропривод в виде второго гидроцилиндра 34 имеет первый конец 34A, присоединенный с возможностью поворота к части стрелы между первым и вторым концами стрелы, и второй конец 34B, присоединенный с возможностью поворота к рукояти вблизи первого конца 22A рукояти. Третий гидропривод в виде третьего гидроцилиндра 36 имеет первый конец 36A, присоединенный с возможностью поворота к рукояти вблизи первого конца 22A рукояти, и второй конец 36B, присоединенный с возможностью поворота к рычажному механизму 38 вблизи второго конца рукояти. Рычажный механизм 38 является, по существу, известным и служит для преобразования выдвижения и втягивания третьего гидроцилиндра 36 в поворотное движение ковша 24 вокруг оси 30 поворота.
Выдвижение первого гидроцилиндра вызывает подъем стрелы, а втягивание первого гидроцилиндра вызывает опускание стрелы. Выдвижение второго гидроцилиндра вызывает поворот рукояти в направлении часовой стрелки (если смотреть на фиг. 1) вокруг оси 28 поворота, т. е., заставляет стрелу перемещаться во "внутреннем" направлении, а втягивание второго гидроцилиндра 34 заставляет рукоять перемещаться в направлении против часовой стрелки, если смотреть на фиг. 1, вокруг оси 28 поворота, т. е., в "наружном" направлении. Выдвижение третьего гидроцилиндра 36 заставляет ковш 24 перемещаться в направлении часовой стрелки вокруг оси 30 поворота, т. е., в направлении "заполнения", а втягивание третьего гидроцилиндра 36 заставляет ковш перемещаться в направлении против часовой стрелки вокруг оси 30 поворота, т. е., в направлении "выгрузки".
Первый, второй и третий гидроцилиндры представляют собой гидроцилиндры двойного действия. Гидроцилиндры двойного действия являются, по существу, известными. Они содержат поршень, расположенный внутри цилиндра. Поршень соединен со штоком, который выходит из цилиндра. Конец штока, удаленный от поршня, образует один конец гидроцилиндра. Конец цилиндра, удаленный от штока, образует противоположный конец гидроцилиндра. Поршневая полость образована между поршнем и концом цилиндра, удаленный от штока. Штоковая полость образована между поршнем и концом цилиндра, ближним к концу штока. Повышение давления в поршневой полости вызывает выдвижение гидроцилиндра, а повышение давления в штоковой полости вызывает втягивание гидроцилиндра.
Машина содержит систему управления первым, вторым и третьим гидроцилиндрами, как описано ниже.
Гидравлический насос (не показан) приводят в действие посредством первичного двигателя. Первичный двигатель может представлять собой двигатель внутреннего сгорания, хотя возможно также использование других первичных двигателей. Оператор может управлять золотниковым клапаном стрелы (не показан) при помощи манипулятора стрелы (не показан) для выдвижения или втягивания гидроцилиндра 32. Золотниковым клапаном рукояти (не показан) можно управлять при помощи регулятора рукояти (не показан) для выдвижения или втягивания гидроцилиндра 34. Золотниковым клапаном ковша (не показан) можно управлять при помощи регулятора ковша (не показан) для выдвижения или втягивания гидроцилиндра 36. Таким образом, оператор может вручную управлять регуляторами стрелы, рукояти и ковша, чтобы обеспечивать маневрирование и перемещение материала.
Машина для перемещения материалов содержит также систему 52 управления.
Система 52 управления может быть избирательно включена или отключена по усмотрению оператора. Для включения системы 52 управления оператор активирует переключатель, кнопку или другое устройство ввода сигнала оператором (не показаны). Для отключения системы 52 управления оператор выключает кнопку, переключатель или другое устройство ввода сигнала оператором.
Если система управления отключена, оператор может вручную управлять регулятором стрелы, регулятором рукояти и регулятором ковша, как описано выше, чтобы обеспечивать маневрирование и перемещение материала.
Если система управления включена, эксплуатацию осуществляют следующим образом.
Система 52 управления позволяет автоматически выполнять запрограммированную последовательность маневров.
Так, например, если требуется выкопать траншею или т. п., оператор включает систему 52 управления. В этом случае система 52 управления обеспечивает управление перемещением стрелы, рукояти и ковша в виде запрограммированной последовательности маневров. Типичная последовательность перемещений рычажного узла является следующей.
Вначале система 52 управления опускает стрелу, и рукоять перемещают в «наружном» направлении, при этом зубья 25 ковша 24 отводятся от шасси 12. Затем стрелу продолжают опускать, при этом зубья 25 ковша входят в зацепление с грунтом. Ковш немного заполняют таким образом, чтобы начать перемещение зубьев ковша сквозь грунт. Система 52 управления осуществляет одновременное управление рукоятью, стрелой и ковшом, чтобы постепенно перемещать рукоять во «внутреннем» направлении, стрелу - в направлении «подъема», а ковш - в направлении «заполнения», т. е., таким образом, чтобы перемещать зубья ковша, по существу, к шасси для заполнения ковша грунтом. После заполнения ковша стрелу поднимают, рычажный узел поворачивают в боковом направлении относительно машины, а затем грунт выгружают при перемещении ковша в позицию выгрузки. Далее эту последовательность, по существу, повторяют. Однако когда ковш возвращают в траншею, его устанавливают не в ту же позицию, в которой его загружали грунт в первый раз, а в удаленную от нее на определенный шаг другую позицию, где происходит вторая загрузка ковша грунтом.
Таким образом, как показано на фиг. 2 и 3, для выкапывания траншеи режущая кромка 24B ковша должна быть вначале расположена на поверхности G грунта в точке 101. Затем система управления перемещает стрелу, рукоять и ковш таким образом, чтобы передвинуть переднюю кромка 24B в точку 102. Далее система управления обеспечивает движение ковша, чтобы выдвинуть режущую кромку 24B в точку 103, после чего стрелу поднимают, перемещая ковш от грунта. Это приводит к выемке часть A грунта, которая показана заштрихованной областью на фиг. 3. Затем раму поворачивают по часовой стрелке относительно шасси (если смотреть на фиг. 2), чтобы переместить ковш во вторую область 60, где предполагается выгружать грунт, вынимаемый из траншеи. Когда ковш 24 находится над второй областью 60, его опорожняют, выгружая вынутую часть A грунта на площадку в области 60. После этого раму поворачивают против часовой стрелки, и режущую кромку 24B возвращают в траншею. Однако, поскольку часть A грунта вынута, переднюю кромку 24B ковша 24 при помощи системы управления необходимо расположить в позиции 102, а не в позиции 101. Чтобы заполнить ковш во второй раз режущую кромку располагают в позиции 102, перемещают в позицию 104, а затем - в позицию 105, чтобы загрузить часть B грунта, которая показана заштрихованной областью на фиг. 3. Затем стрелу поднимают, чтобы приподнять ковш над грунтом, раму поворачивают по часовой стрелке, и часть B грунта выгружают во второй области 60, образуя отвал. Для третьей загрузки ковша режущую кромку вначале располагают посредством системы управления в позиции 104, а затем перемещают в позицию 106 и 107. Для четвертой загрузки ковша режущую кромку вначале располагают посредством системы управления в позиции 106, а затем перемещают в позицию 108 и 109. Для пятой загрузки ковша режущую кромку вначале располагают посредством системы управления в позиции 108, а затем перемещают в позицию 110 и далее в позицию 111. Для шестой загрузки ковша режущую кромку вначале располагают посредством системы управления в позиции 110, а затем перемещается в позицию 112 и 113. Таким образом, каждый раз, когда ковш возвращают в траншею, режущую кромку располагают посредством системы управления на определенном расстоянии от позиции предыдущего цикла.
Требуемое положение траншеи представляет первая область 59 (см. фиг. 2). Отвал траншеи показан во второй области 60 (см. фиг. 2). Изобретение обеспечивает повторяющееся перемещение инструмента для перемещения материалов (в данном примере ковша 24) между первой и второй областями. Однако при этом инструмент возвращается не в одну и ту же позицию в первой области, а автоматически перемещается на определенное расстояние в другую позицию первой области. Таким образом, можно производить постепенное выкапывание траншеи или т. п.
Если требуется выкапывать короткие траншеи, то перемещения только стрелы, рукояти и ковша может быть достаточным для выкапывания короткой траншеи, иными словами, перемещения машины на гусеничных лентах 16 может не потребоваться. Однако при других обстоятельствах, если требуется более длинная траншея, то ее первый участок может быть выкопан (например, путем выемки частей A, B и C грунта), в то время как шасси расположено в позиции 1, показанной на фиг. 2. Для выемки частей D, E и F грунта может оказаться необходимым перемещение шасси в позицию 2, показанную на фиг. 2. Несмотря на перемещение шасси, ковш, тем не менее, возвращается в первую область, т. е., в траншею, для выемки частей D, E и F грунта.
В одном варианте осуществления система обеспечивает автоматическое выкапывание траншеи или т. п., поэтому оператор может не присутствовать физически в машине, а находиться вдали от нее. Это является особенно полезным в условиях опасной окружающей среды, когда оператор может быть удален от машины и находиться в защищенном месте.
Находясь в удалении от машины, оператор может не управлять всеми аспектами работы машины. В одном примере все, что должен сделать оператор - это определить первую позицию первой области и вторую область. После того, как это будет сделано, система управления сможет автоматически обеспечивать последовательность заданных движений, чтобы перемещать материал требуемым образом, например, выкапывать траншею или яму в первой области и складывать вынимаемый грунт во второй области.
Альтернативно этому в другом варианте осуществления контроллер может управлять выполнением только определенных операций. Так, например, для автоматического выполнения операции возвращения инструмента для перемещения материалов в первую область требуется только его расположение во второй позиции первой области, отличной от первой позиции первой области. Это позволяет быстрое возвращение инструмента в соответствующую позицию (например, в траншее), отличную от предшествующей позиции инструмента (например, в траншее). При этом система управления может быстро возвращать инструмент в другую позицию, удаленную на определенный шаг от предшествующей позиции. После этого оператор имеет возможность управлять перемещением инструмента, например, чтобы перемещать материал, до тех пор, пока не потребуется возвращать инструмент в другую позицию, удаленную на определенный шаг от предшествующей позиции. Это является полезным, если перемещаемый материал является неоднородным, например, если в грунте попадаются большие камни или другой аналогичный материал. В частности, при выкапывании траншеи три первые загрузки ковша могут содержать рыхлый материал в частности, почву. Захват этой почвы требует определенного маневра инструмента. Однако четвертая загрузка может потребовать выемки камня или т. п., для чего понадобится несколько иной маневр инструмента. Оператор может определить и выполнить соответствующий маневр инструмента, необходимый для захвата почвы или камня, однако, после того, как почва/камень будут выгружены на отвал, машина сможет возвратить инструмент в соответствующую позицию, сдвинутую на определенный шаг, чтобы подготовить инструмент для перемещения материалов для следующего захвата почвы или другого камня, что будет видно оператору.
Как описано выше и показано на фиг. 3, передняя кромка 24B ковша имеет исходное положение в позиции 101. Для каждой последующей загрузки ковша она располагается в позициях 102, 104, 106, 108 и 110. Это исходное положение, изменяющееся каждый раз с определенным шагом, обычно постепенно приближается к машине. Однако в других вариантах осуществления эти позиции могут изменяться с определенным шагом не в направлении машины, а в любом другом направлении. В частности, при выкапывании глубокой ямы или глубокой траншеи перемещение исходной позиции с определенным шагом может происходить вниз от предшествующей позиции.
Система управления может содержать определенную последовательность выполняемых маневров, которая запрограммирована на заводе-изготовителе. Альтернативно этому система управления может быть запрограммирована в полевых условиях. В частности, систему управления можно запрограммировать в полевых условиях путем записи последовательности маневров с перемещением материала, и последующего повторения этих маневров с определенным смещением. Так, например, в альтернативном способе выкапывания траншеи, показанной на фиг. 3, оператор отключает систему управления и производит выемку частей A и B грунта.
При все еще выключенной системе управления оператор включает систему записи, которая записывает последовательность ручных манипуляций управления стрелой, рукоятью и ковшом, используемых для выемки частей C и D грунта. Эта последовательность записанных маневров становится запрограммированной последовательностью маневров для выемки частей E и F грунта за исключением смещения. Иными словами, последовательность маневров, используемых для выемки частей D и E грунта, повторяют с целью выемки частей E и F грунта за исключением того, что их повторяют с определенным смещением, соответствующим расстоянию между позициями 104 и 108.
В одном варианте осуществления могут быть использованы дополнительные датчики, чтобы создать контур обратной связи для позиционного управления инструментом. Однако в другом варианте осуществления датчики или т. п. и, соответственно, контур обратной связи не требуются. Поэтому такая конструкция является относительно экономичной (поскольку датчики обратной связи не требуются) и относительно простой в техническом обслуживании (в связи с отсутствием датчиков, требующих технического обслуживания).
Как указано выше, машина для перемещения материалов представляет собой экскаватор. Однако настоящее изобретение не ограничено экскаваторами и распространяется на другие машины для перемещения материалов, которые могут быть использованы, например, погрузчик с обратной лопатой, телескопический погрузчик, вилочный погрузчик и т. п. Как указано выше, используемый инструмент представляет собой ковш. Однако в других вариантах осуществления вместо ковша могут быть использованы другие инструменты, например, вилочный захват вилочного погрузчика или вилочный захват телескопического погрузчика и т. п.
Как указано выше операцию расположения инструмента для перемещения материалов в первой позиции первой области и операцию возвращения инструмента для перемещения материалов в первую область путем его расположения во второй позиции первой области, отличной от первой позиции первой области, выполняют в стационарном режиме машины, либо если машина находится в одной и той же стационарной позиции, либо если машина находится в разных стационарных позициях. В других вариантах осуществления также невозможно выполнять одну или обе эти операции во время движения машины, т. е., во время перемещения машины по грунту.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ОПОВЕЩЕНИЯ | 2016 |
|
RU2720541C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО ТРАНСПОРТНОГО СРЕДСТВА ПОД ТРЕБУЕМЫМ УГЛОМ (ВАРИАНТЫ) | 2015 |
|
RU2684818C2 |
| СПОСОБ ВСКРЫТИЯ ЗАГЛУБЛЕННОЙ ТРУБЫ (ВАРИАНТЫ) | 2002 |
|
RU2320915C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2673497C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ ДЛЯ ПЕРЕМЕЩЕНИЯ МАТЕРИАЛОВ | 2014 |
|
RU2698756C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УСТРОЙСТВАМИ САМОЗАГРУЗКИ И САМОРАЗГРУЗКИ | 1990 |
|
RU2031016C1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1745842A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1661479A1 |
| Устройство для выполнения земляных и погрузочно-разгрузочных работ | 1983 |
|
SU1145091A1 |
| ОПТИМИЗАЦИЯ ДИНАМИЧЕСКОГО ДВИЖЕНИЯ ЗЕМЛЕРОЙНЫХ МАШИН | 2015 |
|
RU2657547C1 |
Заявлен способ управления машиной для перемещения материалов. Техническим результатом является комбинирование автоматических и ручных шагов. Способ управления машиной для перемещения материалов, содержащей инструмент для перемещения материалов, установленный с возможностью перемещения относительно шасси машины. Способ содержит следующие операции: расположение инструмента для перемещения материалов в первой позиции первой области; перемещение инструмента для перемещения материалов во вторую область; обеспечение системы управления для автоматического возвращения инструмента для перемещения материалов в первую область путем его расположения во второй позиции первой области, отличной от первой позиции первой области; возвращение инструмента для перемещения материалов во вторую область. 16 з.п. ф-лы, 3 ил.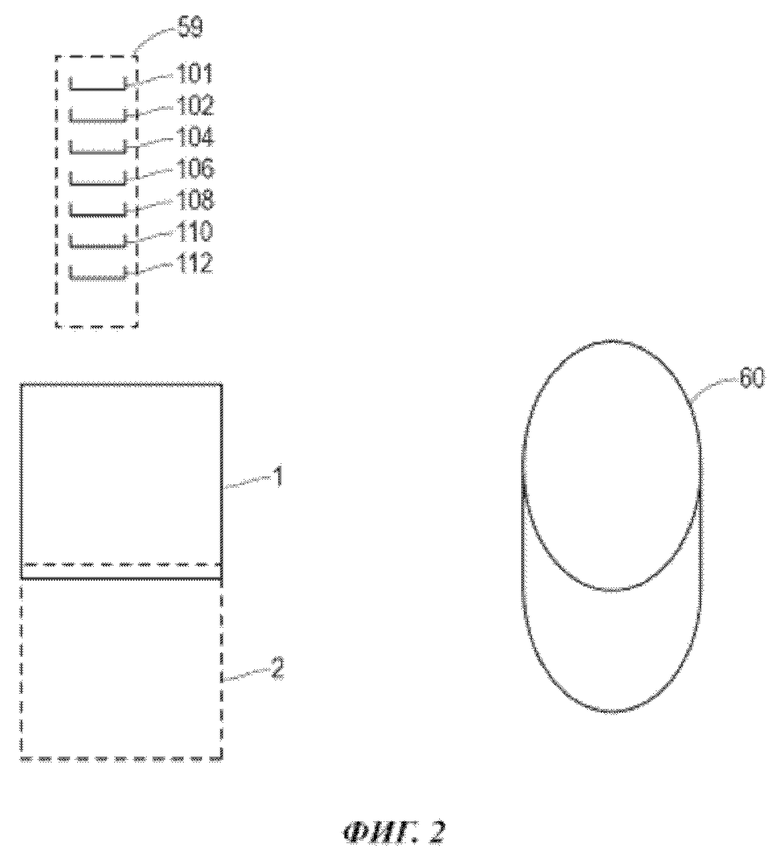
1. Способ управления машиной для перемещения материалов, содержащей инструмент для перемещения материалов, установленный с возможностью перемещения относительно шасси машины, при этом указанный способ содержит следующие операции:
а) ручное расположение инструмента для перемещения материалов в первой позиции первой области траншеи, причем первая область представляет собой область, в которой требуется вручную выкопать траншею,
б) ручное перемещение инструмента для перемещения материалов во вторую область, причем вторая область представляет собой область, в которой требуется складывать грунт,
в) обеспечение системы управления и обеспечение возможности, для указанной системы управления, автоматического возвращения инструмента для перемещения материалов в первую область путем непосредственного расположения инструмента для перемещения материалов во второй позиции первой области, при этом указанная вторая позиция представляет собой следующую последовательную позицию, в которой требуется вручную выкопать траншею, и
г) ручное возвращение инструмента для перемещения материалов во вторую область.
2. Способ по п. 1, отличающийся тем, что операция а) содержит выполнение маневра с перемещением материала с помощью инструмента, при этом указанный маневр предпочтительно представляет собой захват материала.
3. Способ по п. 1 или 2, отличающийся тем, что операция б) содержит перемещение материала, выполняемое инструментом, во вторую область.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что операция б) содержит выполнение маневра с перемещением материала с помощью инструмента во второй области, и при этом указанный маневр предпочтительно представляет собой выгрузку материала.
5. Способ по любому из предыдущих пунктов, отличающийся тем, что операция в) содержит возвращение инструмента для перемещения материалов в первую область без загруженного материала.
6. Способ по любому из предыдущих пунктов, отличающийся тем, что операция в) содержит выполнение маневра с перемещением материала с помощью инструмента, предпочтительно маневр с перемещением материала выполняют согласно п. 2.
7. Способ по любому из предыдущих пунктов, отличающийся тем, что операция г) содержит перемещение материала, выполняемое инструментом, во вторую область.
8. Способ по любому из предыдущих пунктов, отличающийся тем, что операция г) содержит выполнение маневра с перемещением материала с помощью инструмента во второй области, предпочтительно маневр с перемещением материала выполняют согласно п. 4.
9. Способ по любому из предыдущих пунктов, отличающийся тем, что операция б) содержит перемещение инструмента для перемещения материалов в первую позицию второй области, при этом операция г) содержит возвращение инструмента для перемещения материалов во вторую позицию второй области, отличную от первой позиции второй области.
10. Способ по любому из предыдущих пунктов, отличающийся тем, что указанный материал представляет собой хрупкий и/или рыхлый материал.
11. Способ по п. 10, отличающийся тем, что указанный способ используют для перемещения хрупкого и/или рыхлого материала из первой области во вторую область.
12. Способ по любому из предыдущих пунктов, отличающийся тем, что инструмент для перемещения материалов представляет собой ковш или лопату.
13. Способ по любому из предыдущих пунктов, отличающийся тем, что операции а), б), в) и г) выполняют в стационарном положении шасси машины.
14. Способ по любому из предыдущих пунктов, отличающийся тем, что содержит:
д) обеспечение системы управления для автоматического возвращения инструмента для перемещения материалов в первую область путем расположения его в третьей позиции первой области, отличной от первой и второй позиций первой области, при этом вторая позиция первой области представляет собой промежуточную между первой позицией первой области и третьей позицией первой области,
е) возвращение инструмента для перемещения материалов во вторую область.
15. Способ по п. 14, отличающийся тем, что операцию е) автоматически выполняют посредством системы управления.
16. Способ по п. 14, отличающийся тем, что операции а), б), в), г), д) и е) выполняют в стационарном положении шасси машины.
17. Способ по п. 14, отличающийся тем, что операции а), б), в) и г) выполняют в стационарном положении шасси машины, а перед выполнением операций д) и е) шасси машины перемещают в другое и/или соседнее местоположение.
| US 2010223008 A1, 02.09.2010 | |||
| US 6363632 B1, 02.04.2002 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КОПАЮЩЕГО ПРИСПОСОБЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОЧЕЙ МАШИНЫ НА РАБОЧЕЙ ПЛОЩАДКЕ (ВАРИАНТЫ) | 1995 |
|
RU2134329C1 |
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ | 2012 |
|
RU2496303C1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

