Изобретение относится к области авиации, в частности к вертолетной технике и может быть использовано для управления при посадке вертолета в режиме авторотации.
Известен способ увеличения запаса кинетической энергии несущего винта путем установки в концевой части лопасти дополнительного груза, который при незначительном увеличении веса лопасти позволяет получить увеличенный момент инерции несущего винта. Несущий винт с увеличенным моментом инерции обладает при одной и той же угловой скорости вращения большим запасом кинетической энергии по сравнению с исходным вариантом конструкции, который расходуется на погашение вертикальной скорости приземления с режима авторотации (Александров Г.А., Анимица В.А., Леонтьев В.А., Александрии Ю.С. «Исследование влияния величины массовой характеристики лопасти несущего винта на параметры посадки вертолета на режиме авторотации». Доклад на девятом форуме Российского вертолетного общества, 14-15.04. 2010).
Недостатками данного способа являются увеличение массы лопасти и неизбежная доработка конструкции несущего винта с выполнением всего цикла работ, необходимых для доказательства прочности и надежности доработанной конструкции (расчеты, стендовые и летные испытания).
Известен способ посадки вертолета в режиме авторотации с выключенными или отказавшими двигателями, состоящий в уменьшении вертикальной скорости приземления вертолета, для уменьшения которой используют кинетическую энергию движения вертолета и вращение несущего винта путем энергичного торможения поступательной скорости и увеличения общего шага перед приземлением (Вертолеты: Труды ОКБ МВЗ имени М.Л. Миля / Под ред. А.Г. Самусенко. М.: Машиностроение / Машиностроение - Полет, 2010, с. 111-113). Данный способ принят за прототип.
Недостатком известного способа является ограничение раскрутки несущего винта до значений не более nв=90-92% на режиме торможения за счет увеличения угла тангажа ϑ. Это связано с привязкой способа к конструктивным особенностям вертолета Ми-26 (тяжелый вертолет, обладающий несущим винтом с большим моментом инерции).
Для обеспечения требуемого уровня безопасности вертолета (одновинтовой схемы либо соосной схемы) и сохранения жизни членов экипажа и пассажиров при выполнении посадки в режиме авторотации требуется наличие достаточного запаса кинетической энергии вращения несущего винта в момент касания посадочной площадки для более длительного сохранения величины его тяги. Наличие достаточного запаса величины тяги несущего винта позволяет максимально снизить величину вертикальной скорости удара вертолета о посадочную площадку и дает возможность пилоту придать вертолету более горизонтальное положение перед касанием земли. При этом касание происходит всеми опорами шасси, что снижает ударные нагрузки на конструкцию при посадке.
Цель изобретения - уменьшение вертикальной и поступательной скоростей в момент касания шасси вертолета земной поверхности.
Поставленная цель достигается тем, что в способе посадки вертолета в режиме авторотации с выключенными или отказавшими двигателями, состоящей в уменьшении вертикальной скорости приземления вертолета, для уменьшения которой используют кинетическую энергию движения вертолета и вращение несущего винта путем энергичного торможения поступательной скорости и увеличения общего шага перед приземлением, при переходе вертолета из режима авторотации с установившимися значениями вертикальной и поступательной скоростей к выполнению предпосадочного маневра, увеличивают угол тангажа ϑ на 15-20° от балансировочного значения, общий шаг устанавливают на нижнем упоре, производят раскрутку несущего винта до значений оборотов 115-120%, на высоте 5-3 м устанавливают посадочный угол тангажа ϑ, при котором продольная ось вертолета параллельна земле, на высоте 2-1,5 м производят резкое увеличение общего шага с темпом 6-10 градус/с и производят посадку вертолета.
Сущность предлагаемого способа посадки вертолета в режиме авторотации заключается в увеличении запаса кинетической энергии вращения несущего винта, расходуемого на выполнение посадки за счет раскрутки несущего винта до значений оборотов nв=115-120%.
В сложившейся практике отечественного проектирования и эксплуатации вертолетов максимально допустимая скорость вращения несущего винта не превышает 103-107%) на режиме авторотации (Руководство по летной эксплуатации вертолета АНСАТ с гидромеханической системой управления, 338.0000.00 РЛЭ, 30.09.2011, с. 1-16), (Инструкция экипажу вертолета Ми-8МТ. Книга 1. Летная эксплуатация. М.: Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, 1982, с. 44). Поддержание оборотов несущего винта 100% и более, при отсутствии подачи мощности, происходит благодаря наличию вертикальной составляющей скорости Vy, обеспечивающей поддув несущего винта снизу и его работу в режиме ветряка. Поэтому на режиме установившегося снижения, летчик легко регулирует значение оборотов несущего винта ручкой общего шага, т.е. кинетическая энергия движения вертолета преобразуется в кинетическую энергию несущего винта. При приближении к посадочной площадке предписывают следующую методику управления вертолетом для выполнения посадки в режиме авторотации (см., например, 338.0000.00 РЛЭ, 30.09.2011, с. 1-16):
- на высоте 35-30 м при скорости полета 90-70 км/ч увеличить угол тангажа ϑ до 20° и общий шаг на 2-3°;
- обороты несущего винта не должны превышать не выше установленных ограничений (103-107%);
- на высоте 5-3 м придать вертолету посадочное положение (продольная ось вертолета параллельна земле) и выполнить «подрыв» (энергичное увеличение общего шага). Предлагаемый авторами способ посадки вертолета позволяет улучшить посадочные характеристики в режиме авторотации, а именно: уменьшить абсолютную величину вертикальной скорости приземления Vy и поступательную скорость, для чего используются скрытые резервы конструкции несущего винта. Так, несущий винт вертолета АНСАТ прошел статические испытания, и элементы его конструкции выдержали без разрушения 140-150% расчетной нагрузки, откуда следует, что значение ограничений по оборотам несущего винта на режиме авторотации (103-107%)) можно существенно увеличить. Для вертолета АНСАТ, учитывая кратковременность процесса посадки (5-10 с), вполне допустимо поднять ограничение по оборотам несущего винта до значений 115-120%), что повысит кинетическую энергию несущего винта в 1,32-1,44 раза.
Для реализации этого предложения в описанную выше методику управления вертолетом при выполнении посадки в режиме авторотации следует внести следующие корректировки:
- на высоте 35-30 м при скорости полета 90-70 км/ч увеличить угол тангажа ϑ на 15-20° от балансировочного значения, общий шаг на нижнем упоре;
- произвести раскрутку несущего винта до 115-120%;
- на высоте 5-3 м установить посадочный угол тангажа ϑ, при котором продольная ось вертолета параллельна земле;
- на высоте 2-1,5 м произвести резкое увеличение общего шага с темпом 6-10 градус/с.
Пример осуществления способа
Подтверждением предлагаемого способа увеличения эффективности и тяги несущего винта, состоящем в уменьшении вертикальной и поступательной скоростей в момент посадки в режиме авторотации, служат результаты летных испытаний по выполнению посадок при отсутствии мощности (Отчет №АНС.01.338.0000.ЛИАР.01.-16, ч. 2, по результатам дополнительных сертификационных наземных и летных испытаний по определению летных данных и полетных характеристик вертолета АНСАТ).
Сравнение двух полетов выполнения посадок вертолета АНСАТ с режима авторотации.
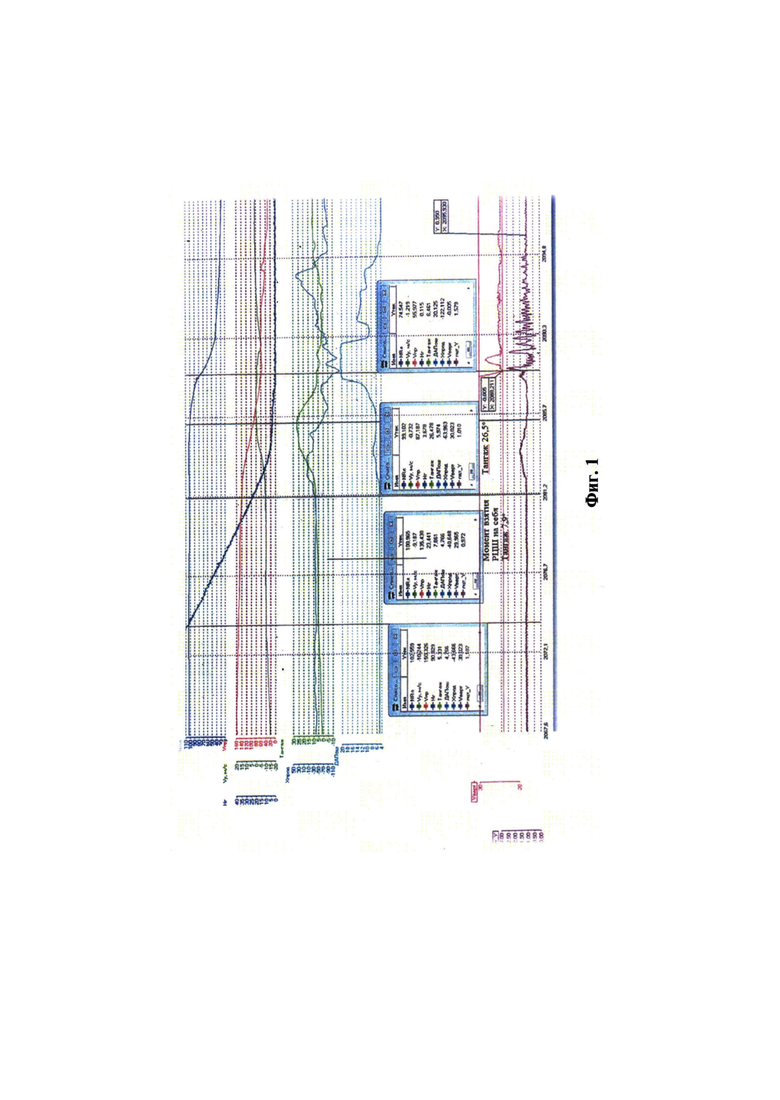
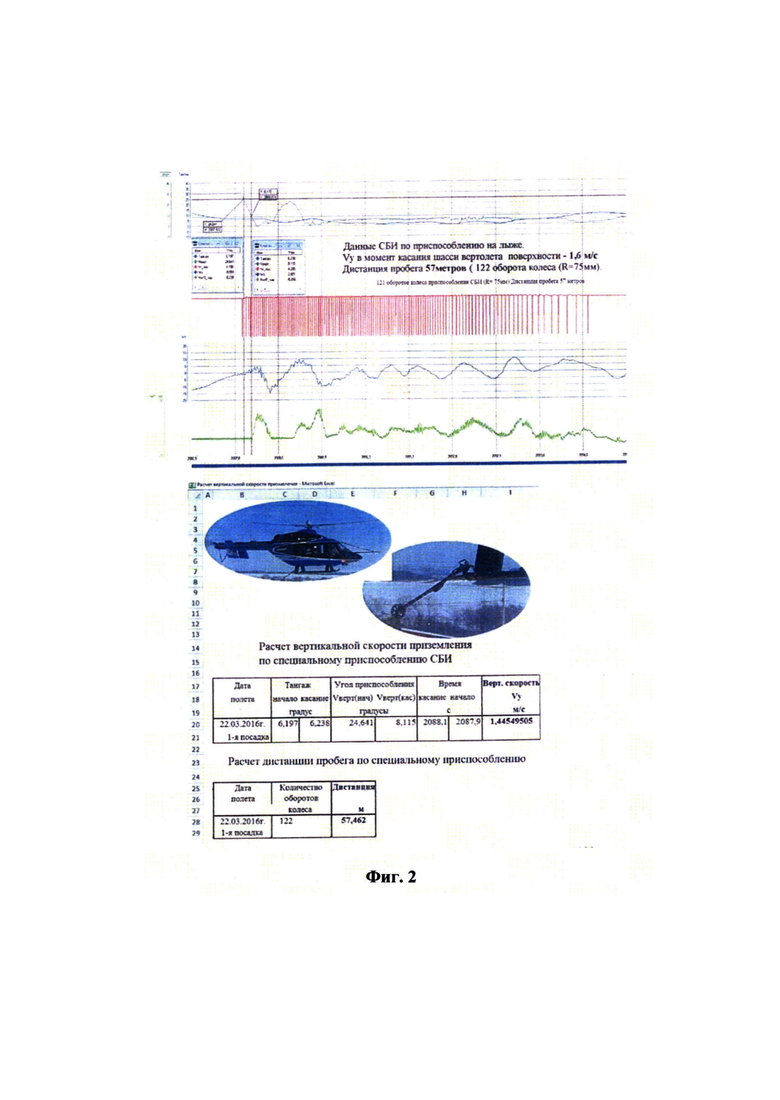
Полет 1. Выполняется предпосадочный маневр, состоящий в увеличении угла тангажа ϑ для выполнения торможения вертолета перед посадкой, обороты несущего винта находятся в диапазоне nв=100-102% (Руководство по летной эксплуатации вертолета АНСАТ с гидромеханической системой управления, 338.0000.00 РЛЭ, 30.09.2011, с. 1-16). Перед посадкой (касанием земли) выполняется «подрыв» - резкое увеличение общего шага несущего винта, в результате чего приземление происходит с вертикальной скоростью Vy=-1.45 м/с (Фиг. 1 и 2).
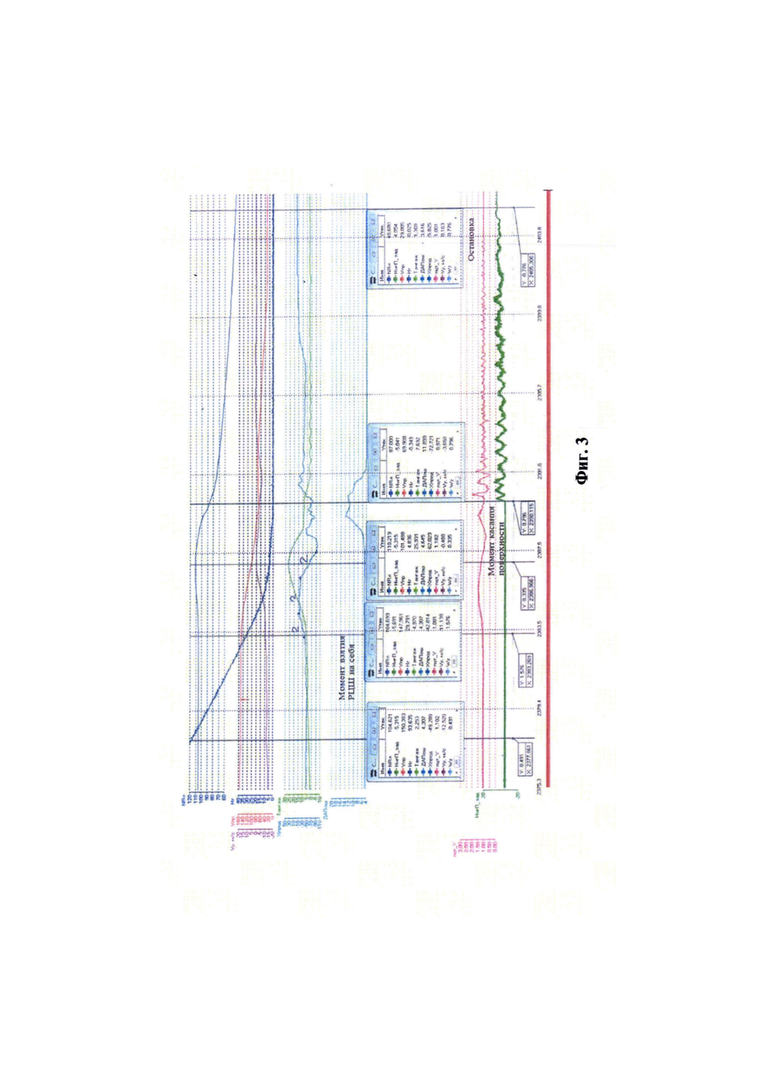
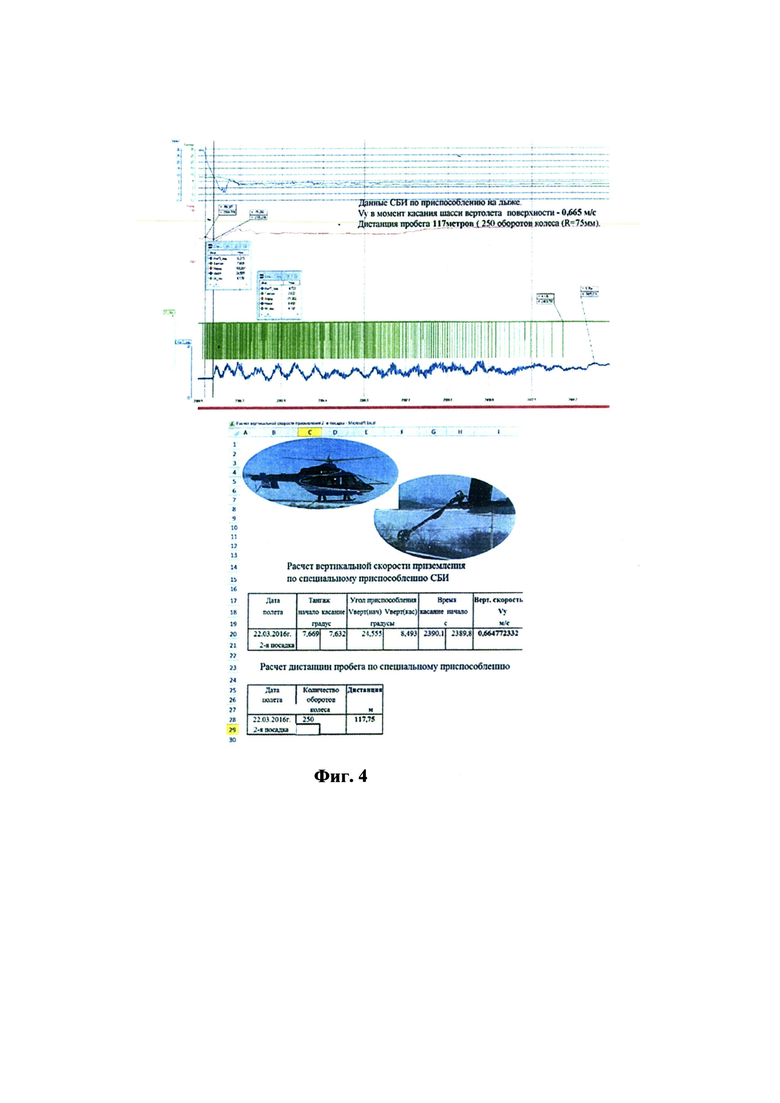
Полет 2. Выполняется предпосадочный маневр, торможение вертолета происходит с увеличением угла тангажа ϑ, при котором летчик позволяет раскрутиться несущему винту до оборотов nв=110%, вследствие чего кинетическая энергия вращения несущего винта увеличивается на 20%. Это позволяет выполнить посадку с вертикальной скоростью Vy=-0,665 м/с, т.е. абсолютное значение вертикальной скорости |Vy| уменьшается на 0,785 м/с (Фиг. 3 и 4).
Эти результаты дают основания полагать, что предлагаемый способ повышения эффективности несущего винта за счет увеличения раскрутки до значений оборотов nв=115-120% позволит существенно уменьшить абсолютную величину вертикальной скорости приземления |Vy| в режиме авторотации, что повысит безопасность осуществления этого сложного маневра - посадка с режима авторотации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И СИГНАЛИЗАЦИИ О ПРИБЛИЖЕНИИ НЕСУЩЕГО ВИНТА К ЗОНЕ РЕЖИМОВ "ВИХРЕВОГО КОЛЬЦА" НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2486596C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА С НЕРАБОТАЮЩИМИ ДВИГАТЕЛЯМИ | 1989 |
|
RU2089457C1 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |
| СПОСОБ УМЕНЬШЕНИЯ УГЛА АТАКИ НЕСУЩЕГО ВИНТА НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА (ВАРИАНТЫ) | 2014 |
|
RU2539621C1 |
| СПОСОБ ИНДИКАЦИИ РЕКОМЕНДАЦИЙ ПИЛОТУ ВОЗДУШНОГО СУДНА ПРИ АВАРИЙНОЙ ПОСАДКЕ В РЕЖИМЕ АВТОРОТАЦИИ | 2024 |
|
RU2838976C1 |
| Система безопасного приземления винтокрылого летательного аппарата при остановившемся двигателе | 2023 |
|
RU2823617C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2021 |
|
RU2805888C2 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
Изобретение относится к способу уменьшения вертикальной скорости приземления вертолета при выполнении посадок с режима авторотации с выключенными (отказавшими) двигателями. Для уменьшения вертикальной скорости приземления используют кинетическую энергию движения вертолета и вращения несущего винта путем энергичного торможения поступательной скорости и увеличения общего шага перед приземлением, при переходе вертолета из режима авторотации к выполнению предпосадочного маневра увеличивают угол тангажа на 15-20° от балансировочного значения, общий шаг устанавливают на нижнем упоре, производят раскрутку несущего винта до значений оборотов 115-120%, устанавливают посадочный угол тангажа, выполняют «подрыв» (резкое увеличение общего шага) на высоте 1.5-2 м (от земли до шасси) с темпом 6-10 градус/с. Обеспечивается повышение безопасности посадки в режиме авторотации за счет увеличения эффективности и тяги несущего винта. 4 ил.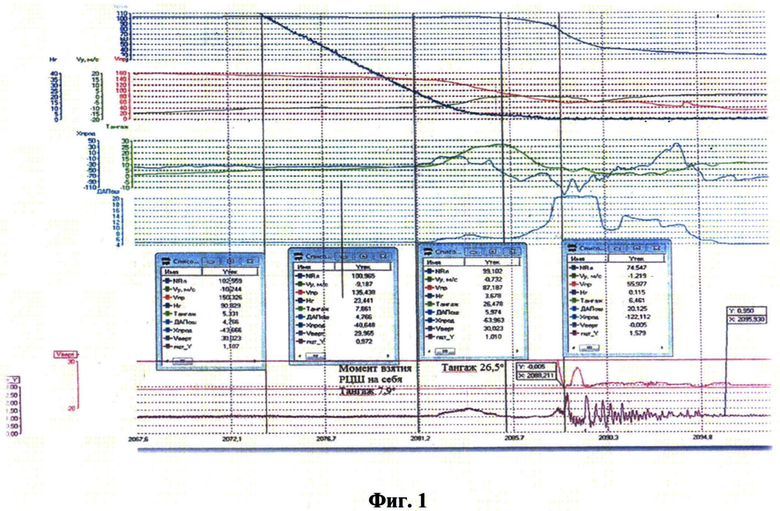
Способ уменьшения вертикальной скорости приземления вертолета при выполнении посадок с режима авторотации с выключенными (отказавшими) двигателями, состоящий в использовании кинетической энергии движения вертолета и вращения несущего винта путем энергичного торможения поступательной скорости и увеличения общего шага перед приземлением, отличающийся тем, что при переходе вертолета из режима авторотации с установившимися значениями вертикальной и поступательной скоростей к выполнению предпосадочного маневра увеличивают угол тангажа ϑ на 15-20° от балансировочного значения, общий шаг устанавливают на нижнем упоре, производят раскрутку несущего винта до значений оборотов 115-120%, при этом установку посадочного угла тангажа ϑ перед «подрывом» общего шага несущего винта осуществляют на высоте 5-3 м, а сам «подрыв» выполняют на высоте 1.5-2 м (от земли до шасси) с темпом 6-10 градус/с.
| СИСТЕМА ПРИВОДА НЕСУЩИХ ВИНТОВ И УПРАВЛЕНИЯ ИМИ ДЛЯ ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2377161C2 |
| 0 |
|
SU130951A1 | |
| US 20170369160 A1, 28.12.2017 | |||
| СПОСОБ ОБРАБОТКИ ДРЕВЕСНОЙ ПЛИТЫ | 2013 |
|
RU2631172C2 |
| JP 5039094 A, 19.02.1993. | |||

