Изобретение относится к ракетно-космической технике, а именно к способам управления движением разгонных блоков (РБ) на жидком топливе, обеспечивающих переход с опорной орбиты, полученной с помощью ракеты-носителя, на целевую орбиту космического аппарата (КА).
В изобретении решаются задачи диагностики отказов двигателей ориентации и компенсации отказавших двигателей.
В космической технике известен алгоритм диагностики отказов двигателей ориентации МКС, принятый за отдаленный аналог, при котором используются дополнительные резервные двигатели ориентации (см. [1]). Алгоритм диагностики отказов исключает ложные отказы вызываемые упругими колебаниями конструкции. Недостатком прототипа является то, что он не обеспечивает управление РБ при выходе из строя всех штатных двигателей ориентации в одном из каналов тангажа или рысканья.
Задачей изобретения является обеспечение ориентации разгонного блока при выходе из строя всех штатных двигателей ориентации в одном из каналов тангажа или рысканья путем использования двигателей ориентации в канале крена.
Указа иная задача выполняется за счет того, что в способе компенсации потери тяги двигателями ориентации разгонного блока, заключающемся в том, что используют алгоритм диагностики отказов двигателей ориентации и при критической потере тяги двигателями ориентации в канале тангажа или рысканья используют двигатели ориентации в канале крена, при этом, в алгоритме диагностики отказов определяют номинальный момент М, создаваемый двигателем, измеряют угловую скорость разгонного блока, на основании которой определяют корректировку момента р, создаваемого двигателем, ее математическое ожидание <р> и ее дисперсию D(p); выбирают постоянную времени апериодического звена, посредством которого исключают ложную идентификации отказа двигателей; выбирают признак критической потери тяги двигателями: М+<р> < М/3 и D(p) < М2/25.
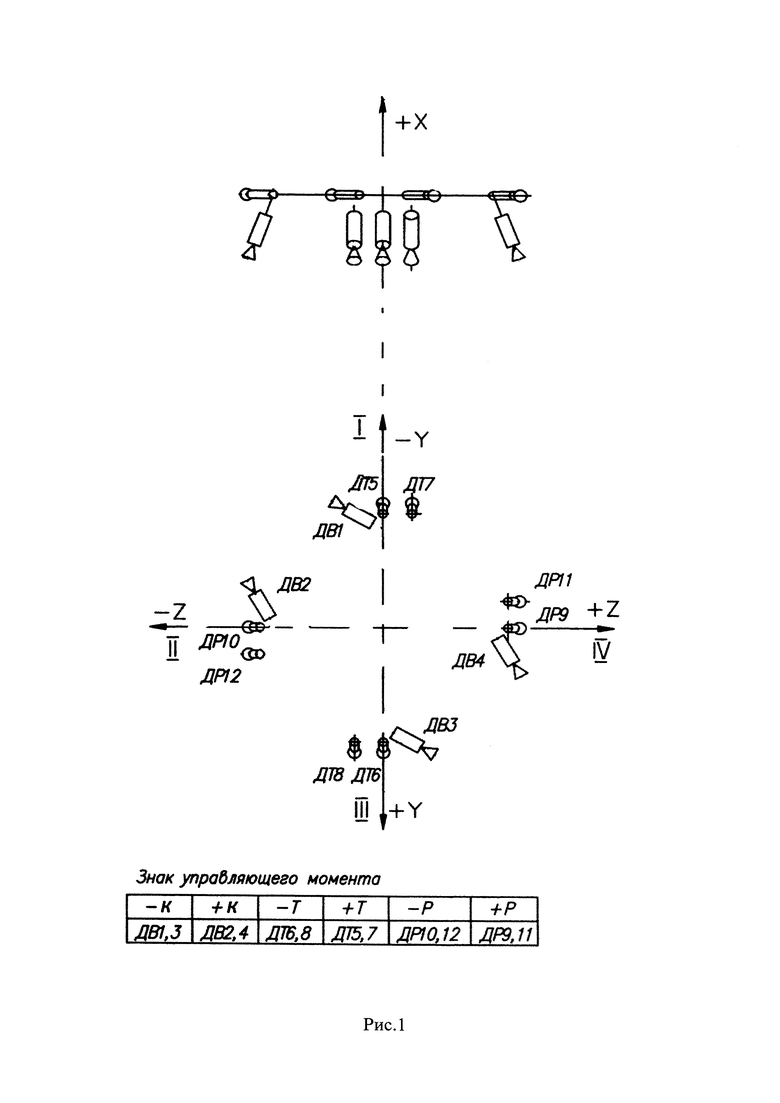
На рис. 1 и 2 представлена схема расположения двигателей малой тяги (ДМТ) (двигателей ориентации), обеспечивающих угловую стабилизацию РБ «Фрегат». ДМТ 1, 3 и 2, 4 относятся к каналу крена, ДМТ 5, 7 и 6, 8 относятся к каналу тангажа, ДМТ 10, 12 и 9, 11 относятся к каналу рысканья. Можно видеть, что в случае, если продольные координаты центра масс РБ и плоскости расположения ДМТ 1÷4 различны, то управляющие двигатели канала крена ДМТ 1÷4 имеют плечо для стабилизации по тангажу и рысканью. Величина плеча зависит от массы топлива и полезной нагрузки и меняется при разных полезных нагрузках и в ходе полета из-за расхода топлива. Если центр масс РБ расположен выше плоскости расположения ДМТ 1÷4 (Хцм > Хдв), то например, для парирования полного отказа ДМТ 5, 7 можно использовать ДМТ 3, 4. Аналогично, отказ ДМТ 6, 8 может парироваться работой ДМТ 1, 2; отказ ДМТ 9, 11 может парироваться работой ДМТ 1, 2 и отказ ДМТ 10, 12 - работой ДМТ 3, 4.
Такое включение не создает момента по вращению, но при создании момента по тангажу одновременно создается момент и по рысканью. Ненужный момент компенсируется соответствующими двигателями угловой стабилизации.
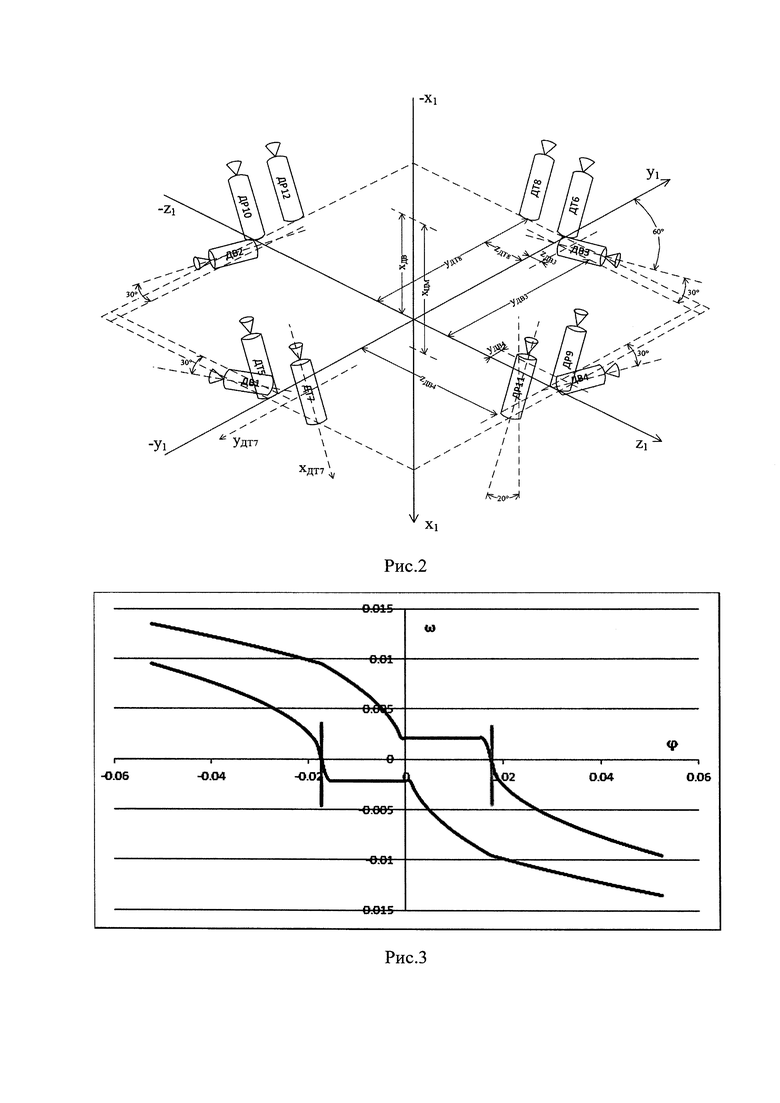
Ориентация и стабилизация углового положения РБ на пассивных участках полета, осуществляется при помощи импульсных включений двигателей ориентации, при этом тягу двигателей можно считать постоянной. При осуществлении стабилизации важно обеспечить нахождение отклонений по углу ориентации внутри заданного коридора и ограничения на максимальную скорость разворота. Как показано в работах [2][3] для оптимизации управления по быстродействию применяется алгоритм, основанный на поверхности переключения. Для построения алгоритма стабилизации рассмотрим поведение объекта в фазовом пространстве, где ϕ - угол разворота, ω - скорость разворота. При постоянном управляющем моменте М траектория объекта в фазовом пространстве описывается параболой:
ϕ(ω)=ω2/(2⋅М)+ϕо,
Исходя из соотношения была построена поверхность переключения, показанная на рис. 3.
При угловой скорости превышающей значение, заданное линией 1, включается двигатель, дающий отрицательный импульс, при угловой скорости меньше значения, заданного линией 2, включается двигатель дающий положительный импульс. Вертикальными линиями обозначен коридор допустимых значений по углу рассогласования. Граница поверхности переключения состоит из парабол и прямых на разных участках в зависимости от момента, создаваемого двигателями вдоль соответствующей оси вращения.
Рассмотрим метод идентификации отказа ДМТ. Для этого будем оценивать тягу ДМТ.
Для определения тяги двигателей ориентации использовался фильтр Калмана с коэффициентами К, вычисленными на персональном компьютере для номера такта n→∞, т.е. не зависящими от n. Согласно методике использования фильтра Калмана, имеем (n- номер такта):

Здесь  - предсказанный вектор состояния, а
- предсказанный вектор состояния, а  - скорректированный по результатам измерения Yn вектор
- скорректированный по результатам измерения Yn вектор  где ωn - оцениваемая угловая скорость, рn - корректировка момента, создаваемого двигателем; А - матрица вида
где ωn - оцениваемая угловая скорость, рn - корректировка момента, создаваемого двигателем; А - матрица вида  В и С - вектора вида
В и С - вектора вида  , М - управляющий момент, ΔT - длительность такта, измерение Yn есть определенная на борту угловая скорость РБ, un-1 - управляющее воздействие на n-1 такте (признак включения двигателя), вектор коэффициентов
, М - управляющий момент, ΔT - длительность такта, измерение Yn есть определенная на борту угловая скорость РБ, un-1 - управляющее воздействие на n-1 такте (признак включения двигателя), вектор коэффициентов  был вычислен на персональном компьютере заранее, он зависит от ΔТ=0,065536 с.
был вычислен на персональном компьютере заранее, он зависит от ΔТ=0,065536 с.
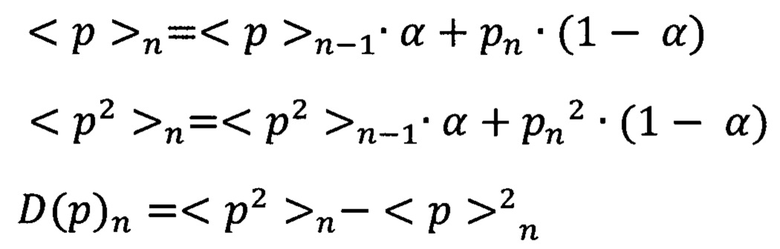
В случае работы двигателя, величина М+рn является оценкой реального момента создаваемого двигателем на n-ом такте. Поскольку при переключении двигателей происходят переходные процессы, при которых значение М+рn может сильно отличаться от реального момента, создаваемого двигателем, оценивалась дисперсия величины рn. Для оценки дисперсии вычислялось взвешенное математическое ожидание <р> и взвешенная дисперсия D(p) на n-ом такте величины р и по формулам:

где  величина, меньшая единицы, где Т - постоянная времени апериодического звена фильтрующего <р> и D(p); Т выбирается из соображений исключения ложной идентификации отказа ДМТ.
величина, меньшая единицы, где Т - постоянная времени апериодического звена фильтрующего <р> и D(p); Т выбирается из соображений исключения ложной идентификации отказа ДМТ.
получим соотношения:
Используя эти соотношения был выбран следующий признак критической потери тяги двигателями ориентации (n→∞):
М+<р> < М/3 и D(p) < M2/25
Таким образом, заявлен способ компенсации потери тяги двигателями ориентации разгонного блока, заключающийся в том, что используют алгоритм диагностики отказов двигателей ориентации и при критической потере тяги двигателями ориентации в канале тангажа или рысканья используют двигатели ориентации в канале крена, при этом, в алгоритме диагностики отказов определяют номинальный момент М, создаваемый двигателем, измеряют угловую скорость разгонного блока, на основании которой определяют корректировку момента р, создаваемого двигателем, ее математическое ожидание <р> и ее дисперсию D(p); выбирают постоянную времени апериодического звена, посредством которого исключают ложную идентификации отказа двигателей; выбирают признак критической потери тяги двигателями: М+<р> < М/3 и D(p) < М2/25.
Техническим результатом изобретения является обеспечение ориентации разгонного блока при выходе из строя всех штатных двигателей ориентации в одном из каналов тангажа или рысканья путем использования двигателей ориентации в канале крена.
Источники информации:
1. А.В. Жирнов, С.Н. Тимаков. Алгоритм диагностики отказов двигателей ориентации МКС на основе самонастраивающейся бортовой модели динамики углового движения. М.: Вестник МГТУ им. Н.Э. Баумана серия "Приборостроение", 2016 г.,
2. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. М.: «Наука», 1974 г., стр. 191-194.
3. К.С. Колесников. Динамика ракет. М.: «Машиностроение», 2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2015 |
|
RU2594844C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568527C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| СПОСОБ БЕЗОПАСНОГО СТАРТА РАКЕТЫ С МНОГОДВИГАТЕЛЬНОЙ ПЕРВОЙ СТУПЕНЬЮ | 2011 |
|
RU2481251C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2021 |
|
RU2805888C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА | 2018 |
|
RU2722628C2 |
| СПОСОБ ЗАЩИТЫ ОТ АВАРИИ МНОГОКАНАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ | 2012 |
|
RU2521117C1 |
Изобретение относится к ракетно-космической технике. В способе компенсации потери тяги двигателями ориентации разгонного блока используют алгоритм диагностики отказов двигателей ориентации и при критической потере тяги двигателями ориентации в канале тангажа или рысканья используют двигатели ориентации в канале крена. В алгоритме диагностики отказов определяют номинальный момент М, создаваемый двигателем, измеряют угловую скорость разгонного блока, на основании которой определяют корректировку момента р, создаваемого двигателем, ее математическое ожидание <р> и ее дисперсию D(p); выбирают постоянную времени апериодического звена, посредством которого исключают ложную идентификации отказа двигателей; выбирают признак критической потери тяги двигателями: М+<р> < М/3 и D(p) < М2/25. Техническим результатом изобретения является обеспечение ориентации разгонного блока при выходе из строя всех штатных двигателей ориентации в одном из каналов тангажа или рысканья путем использования двигателей ориентации в канале крена. 3 ил.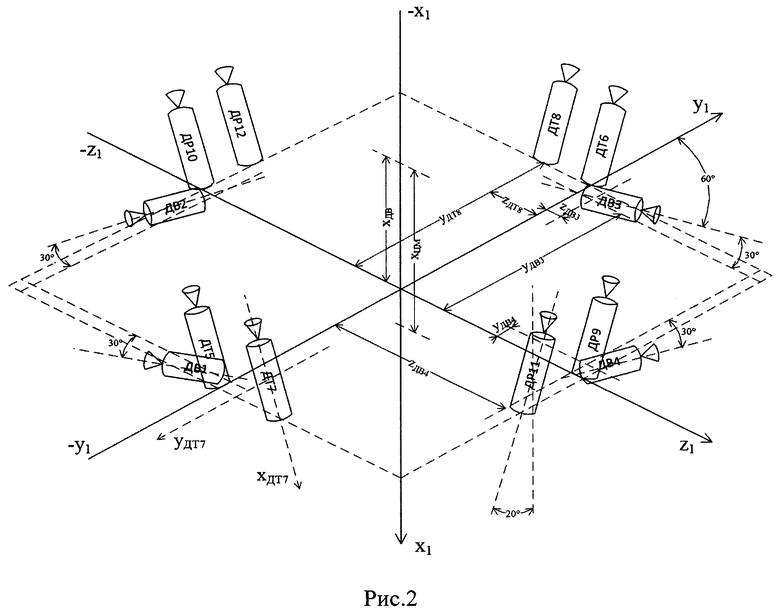
Способ компенсации потери тяги двигателями ориентации разгонного блока, заключающийся в том, что используют алгоритм диагностики отказов двигателей ориентации и при критической потере тяги двигателями ориентации в канале тангажа или рысканья используют двигатели ориентации в канале крена, при этом в алгоритме диагностики отказов определяют номинальный момент М, создаваемый двигателем, измеряют угловую скорость разгонного блока, на основании которой определяют корректировку момента р, создаваемого двигателем, ее математическое ожидание <р> и ее дисперсию D(p); выбирают постоянную времени апериодического звена, посредством которого исключают ложную идентификацию отказа двигателей; выбирают признак критической потери тяги двигателями: М+<р> < М/3 и D(p) < М2/25.
| Жирнов А.В | |||
| и др | |||
| Алгоритм диагностики отказов двигателей ориентации МКС на основе самонастраивающейся бортовой модели динамики углового движения | |||
| Вестник МГТУ им | |||
| Н.Э | |||
| Баумана | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| -М.: МГТУ им | |||
| Н.Э | |||
| Баумана, 2016 | |||
| Раушенбах Б.В | |||
| и др | |||
| Управление ориентацией космических аппаратов | |||
| М.: "Наука", 1974 | |||
| СПОСОБ ФОРМИРОВАНИЯ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ ЕГО НАВЕДЕНИЕМ НА ЗАДАННУЮ ОРБИТУ | 2005 |
|
RU2282568C1 |

