ИНФОРМАЦИЯ ОБ УРОВНЕ ТЕХНИКИ
1. Область техники
[001] Настоящее изобретение относится в целом к радионавигационным системам летательных аппаратов, а в частности, к системам захода на посадку летательных аппаратов с помощью радиолокационных станций.
2. Уровень техники
[002] Единственной используемой в настоящее время системой, которая в любых метеоусловиях обеспечивает точный заход на посадку летательного аппарата, является хорошо известная курсо-глиссадная система или система точной посадки по приборам (ILS), однако в ближайшие годы ожидается внедрение спутниковой системы GLS захода на посадку с помощью наземных корректирующих станций или системы дифференциальной коррекции (Ground Based Augmentation System, GBAS). Тем не менее обе эти системы являются относительно дорогими в установке и обслуживании, а в некоторых местах расположения взлетно-посадочных полос их сложно реализовать.
[003] Чтобы в плохих метеоусловиях осуществить точный заход на посадку по приборам с приближением к взлетно-посадочной полосе, погодные условия должны быть не меньше определенного заданного минимума, зависящего от "категории" курсо-глиссадной системы, действующей на этой взлетно-посадочной полосе, т.е. категории I, категории II или категории IIIa, IIIb или IIIc. Если погодные условия ниже категории курсо-глиссадной системы, пилот должен прибегнуть к схеме ожидания, надеясь на такое улучшение погодных условий, при которых категория курсо-глиссадной системы позволит совершить посадку, или должен совершить посадку в другом аэропорту. Посадки не могут быть выполнены в аэропортах, условия в которых ниже категории курсо-глиссадной системы.
[004] Системы, используемые летательным аппаратом для захода на посадку, могут быть подразделены на "автономные" (т.е. системы, которые используют оборудование, расположенное только на борту летательного аппарата, такое как инерциальная навигационная система (INS)) и "зависимые от других средств" (т.е. системы, которые используют оборудование, расположенное на борту летательного аппарата и в других местах, например возле взлетно-посадочной полосы, такое как курсо-глиссадная система (ILS), и/или в другом месте, например на орбитальных спутниках глобальной системы местоопределения (GPS)).
[005] В целом, в данной отрасли промышленности существует потребность в системах и способах, которые могут обеспечивать заход на посадку и посадку на взлетно-посадочную полосу с такими точностью и целостностью аэронавигационных данных, что операция может считаться эквивалентной соответствующей "категории" курсо-глиссадной системы, с использованием только бортового оборудования летательного аппарата. Это позволило бы обеспечить наведение при посадке в любых метеоусловиях практически в любом месте (т.е. без каких-либо ограничений по местности) и при минимальных инвестициях в оборудование и эксплуатационных расходах со стороны операторов аэропортов.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[006] В соответствии с раскрытием настоящего изобретения раскрыты один или более вариантов реализации систем и способов, которые, например, могут придать требуемые точность и целостность аэронавигационным данным, необходимые для обеспечения наведения при заходе на посадку в любых метеоусловиях с использованием только бортового оборудования летательного аппарата, с обеспечением, таким образом, наведения при заходе на посадку в любых метеоусловиях в любом месте (т.е. без каких-либо ограничений по местности) и с минимальными затратами со стороны операторов аэропортов.
[007] В одном варианте реализации изобретения способ управления летательным аппаратом включает сохранение данных на борту летательного аппарата. Сохраненные данные содержат относительные положения, относительно друг друга и взлетно-посадочной полосы, множества радиолокационных целей, таких как пассивные радиолокационные отражатели, расположенных в пределах области возле взлетно-посадочной полосы, и необходимую ориентацию летательного аппарата относительно взлетно-посадочной полосы. Затем эту область сканируют с помощью радиолокационной станции, размещенной на борту летательного аппарата, для получения данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата, множества радиолокационных отражений от указанной области, включая отражения от радиолокационных целей. Затем радиолокационные данные, соответствующие радиолокационным целям, отличают от радиолокационных данных, соответствующих радиолокационным отражениям от указанной области с использованием алгоритма определения корреляции, и затем положения и ориентации летательного аппарата относительно взлетно-посадочной полосы оценивают с использованием сохраненных данных и данных, соответствующих радиолокационным целям. Затем положение и ориентацию летательного аппарата относительно взлетно-посадочной полосы оценивают с использованием навигационной системы, которая независима от указанной радиолокационной станции, такой как инерциальная навигационная система, и затем вычисляют разности между оценочным и установленным положениями и оценочной и установленной ориентациями, соответственно. После этого разности могут быть использованы для исправления погрешностей в определении оценочных положения и ориентации летательного аппарата.
[008] В другом варианте реализации изобретения система для управления летательным аппаратом содержит базу данных, размещенную на борту летательного аппарата, в которой сохранены данные, соответствующие относительным положениям, относительно друг друга и взлетно-посадочной полосы, множества радиолокационных целей, расположенных в пределах области возле взлетно-посадочной полосы, и необходимую ориентацию летательного аппарата относительно взлетно-посадочной полосы. Радиолокационная станция размещена на борту летательного аппарата и выполнена с возможностью сканирования, обнаружения и выработки данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата, множества радиолокационных отражений от указанной области, включая отражения от радиолокационных целей. Коррелятор расположен на борту летательного аппарата и выполнен с возможностью отличения данных, соответствующих радиолокационным целям, от данных, соответствующих радиолокационным отражениям. Навигационная система размещена на борту летательного аппарата и выполнена с возможностью установления положения и ориентации летательного аппарата относительно взлетно-посадочной полосы независимо от указанной радиолокационной станции и с использованием по меньшей мере одной из таких систем, как глобальная система местоопределения (GPS), инерциальная навигационная система (INS), система на основе всенаправленного дальномерного радиомаяка (DME), система на основе всенаправленного азимутального радиомаяка (VOR) и/или курсо-глиссадная система (ILS). Навигационная система также выполнена с возможностью оценивания положения и ориентации летательного аппарата относительно взлетно-посадочной полосы с использованием сохраненных данных и радиолокационных данных, соответствующих радиолокационным целям, вычисления разности положений между оценочным и установленным положениями, вычисления разности ориентаций между оценочной и установленной ориентациями и управления летательным аппаратом в соответствии с разностями положений и/или ориентаций.
[009] Еще в одном варианте реализации изобретения устройство для управления летательным аппаратом содержит радиолокационную станцию, размещенную на борту летательного аппарата и выполненную с возможностью сканирования области, окружающей взлетно-посадочную полосу, и создания радиолокационных данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата, множества радиолокационных отражений от указанной области. Коррелятор расположен на борту летательного аппарата и выполнен с возможностью соотнесения радиолокационных данных и данных, сохраненных на борту летательного аппарата. Сохраненные данные содержат относительные положения, относительно друг друга и взлетно-посадочной полосы, множества радиолокационных целей, расположенных в пределах указанной области, и необходимую ориентацию летательного аппарата относительно взлетно-посадочной полосы, для отличения радиолокационных данных, соответствующих радиолокационным целям, от радиолокационных данных, соответствующих радиолокационным отражениям от указанной области. Навигационная система размещена на борту летательного аппарата и выполнена с возможностью установления положения и ориентации летательного аппарата относительно взлетно-посадочной полосы независимо от указанной радиолокационной станции. Компьютер размещен на борту летательного аппарата и выполнен с возможностью оценивания положения и ориентации летательного аппарата относительно взлетно-посадочной полосы с использованием радиолокационных данных, соответствующих радиолокационным целям, и сохраненных данных об ориентации летательного аппарата и вычисления разности между установленными положением и ориентацией и оценочными положением и ориентацией. Как указано выше, эта разность может быть использована для обеспечения захода летательного аппарата на посадку и его посадки на взлетно-посадочную полосу, например, путем исправления возможных погрешностей в определении положения и ориентации летательного аппарата, установленных обычной навигационной системой.
[0010] Объем настоящего изобретения определяется прилагаемой формулой изобретения, которая включена в настоящий документ посредством ссылки. Лучшее понимание новых систем и способов раскрытия настоящего изобретения, а также понимание указанных выше и дополнительных его преимуществ, станут доступны специалисту в данной области техники с помощью рассмотрения следующего подробного описания одного или нескольких приведенных в качестве примера вариантов его реализации. В этом описании делается ссылка на различные виды прилагаемых листов чертежей, кратко описанных ниже, на которых одинаковые ссылочные позиции используются для обозначения одинаковых элементов, показанных на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] На ФИГ. 1 представлена функциональная блок-схема приведенного в качестве примера варианта реализации системы для управления летательным аппаратом для обеспечения точного захода на посадку и посадки на взлетно-посадочную полосу в любых метеоусловиях в соответствии с настоящим изобретением;
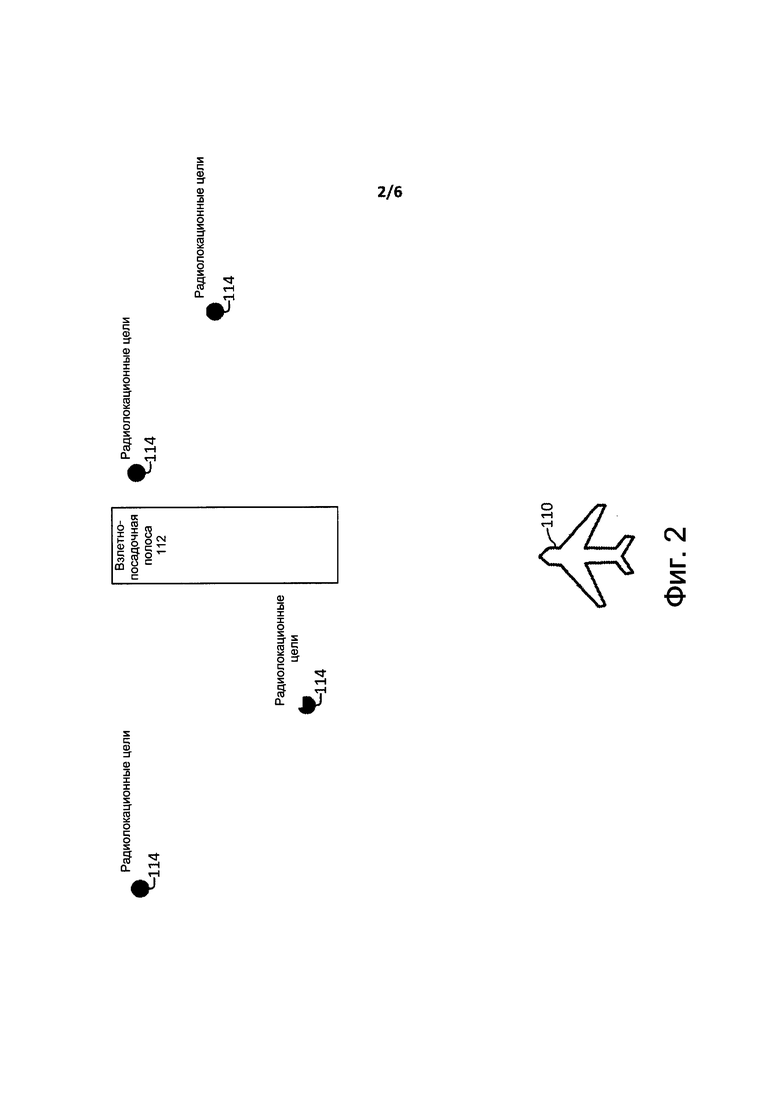
[0012] на ФИГ. 2 представлен вид сверху летательного аппарата, приближающегося к взлетно-посадочной полосе, с множеством радиолокационных целей, расположенных в пределах области возле взлетно-посадочной полосы, в соответствии с приведенным в качестве примера вариантом реализации настоящего изобретения;
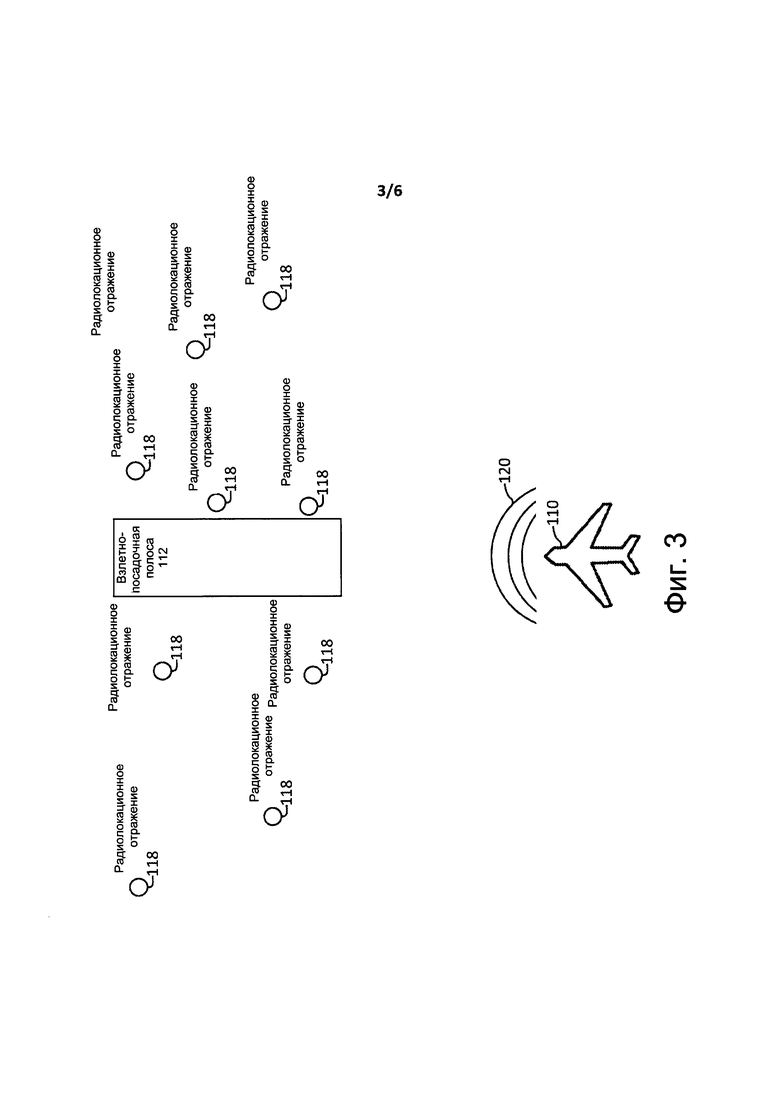
[0013] на ФИГ. 3 представлен вид сверху летательного аппарата и области по ФИГ. 2 с множеством радиолокационных отражений от указанной области, полученных в результате ее сканирования радиолокационной станцией, размещенной на борту летательного аппарата;
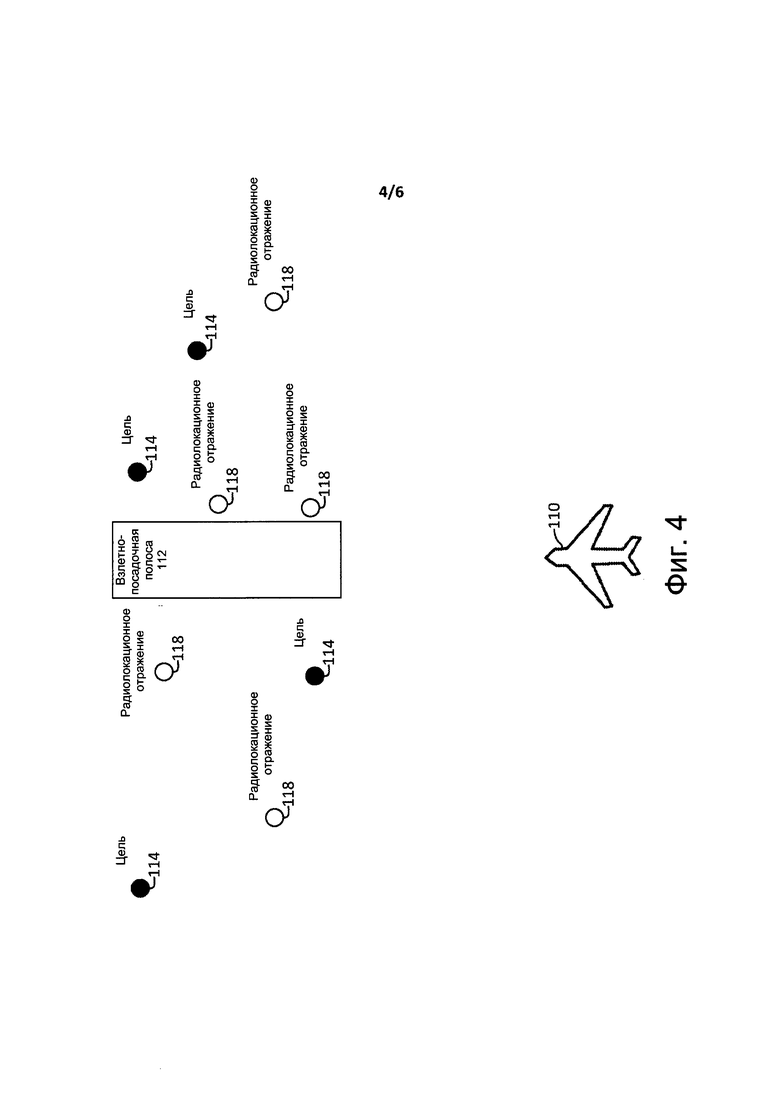
[0014] на ФИГ. 4 представлен вид сверху летательного аппарата и области по ФИГ. 3 с радиолокационными отражениями, соответствующими радиолокационным целям, которые отличают от других радиолокационных отражений, возвращаемых от указанной области;
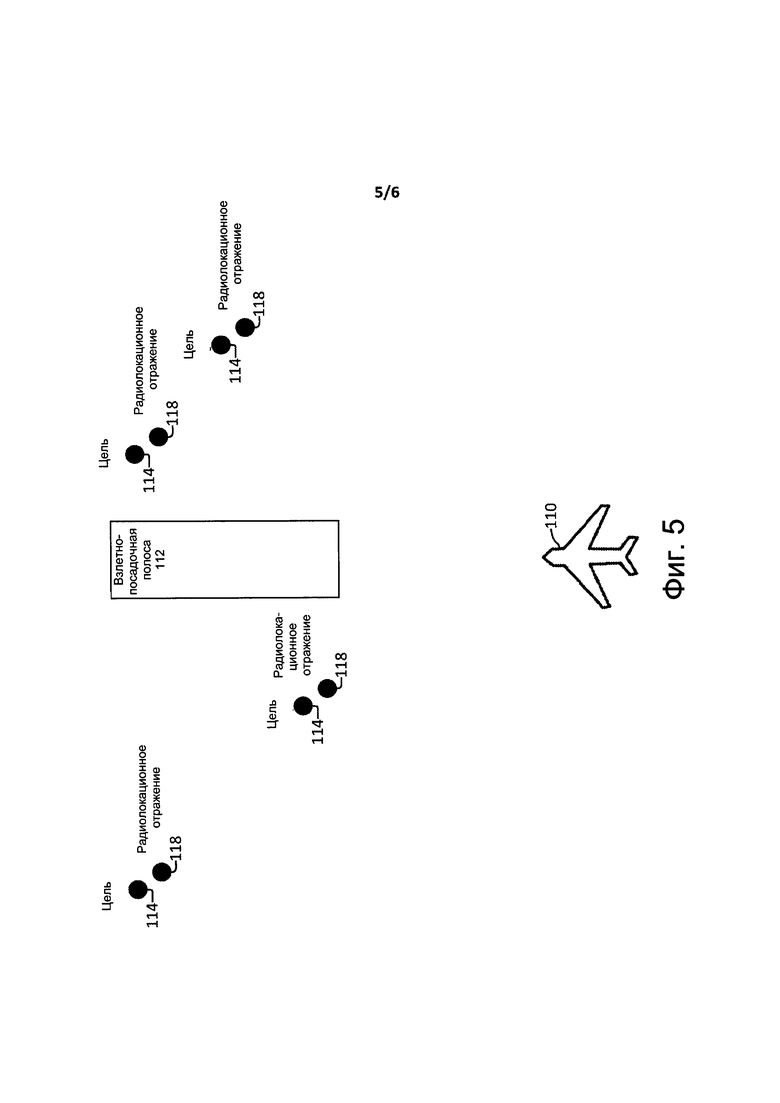
[0015] на ФИГ. 5 представлен вид сверху летательного аппарата и области по ФИГ. 4 с разностями между соответствующим положением и ориентацией радиолокационных целей, сохраненными в базе данных на борту летательного аппарата, и отличаемыми радиолокационной станцией, соответственно, используемой для вычисления погрешностей в определении положении и ориентации летательного аппарата и
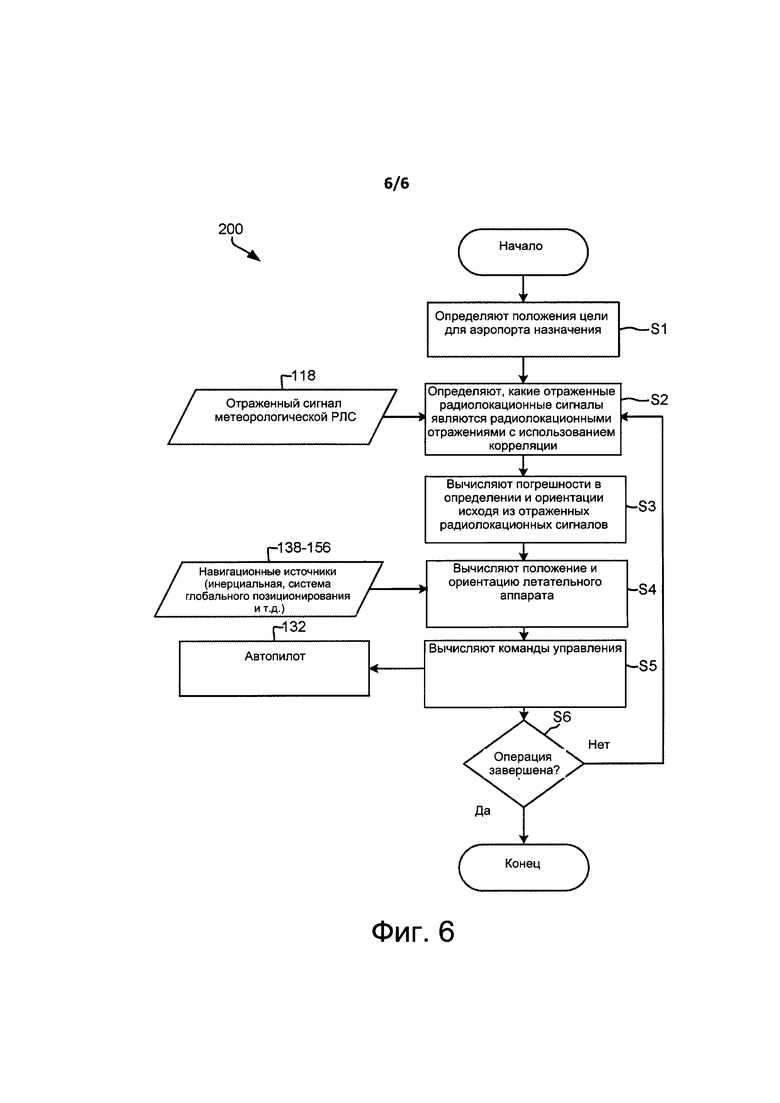
[0016] на ФИГ. 6 представлена блок-схема приведенного в качестве примера варианта реализации способа управления летательным аппаратом в соответствии с раскрытием настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0017] Единственной используемой в настоящее время системой, обеспечивающей посадку в любых метеоусловиях, является курсо-глиссадная система категории III (т.е. категории IIIa, IIIb или IIIc). В будущем ожидается использование спутниковой системы захода на посадку с помощью наземных корректирующих станций, возможности которой будут расширены и будут соответствовать категории III заходов на посадку. Однако курсо-глиссадная система и спутниковая система захода на посадку с помощью наземных корректирующих станций имеют ограничения по месту их возможного размещения, обусловленные факторами местности, которые влияют на распространение сигналов наведения. Кроме того, для категории III требуется относительно дорогостоящие контроль и периодические калибровочные работы, что делает реализацию и поддержание этой категории относительно сложными, например, для развивающихся стран. Таким образом, даже при условии одобрения использования такой спутниковой системы для работы в условиях категории III, ее реализация по-прежнему будет ограничена вследствие затрат на наземную инфраструктуру, которую необходимо развернуть и обслуживать в каждом аэропорту.
[0018] Один или более вариантов реализации раскрытия настоящего изобретения могут, например, придать требуемые точность и целостность аэронавигационным данным, необходимые для обеспечения наведения при заходе на посадку в любых метеоусловиях с использованием только бортового оборудования летательного аппарата с обеспечением, таким образом, наведения при заходе на посадку в любых метеоусловиях почти в любом месте расположения взлетно-посадочной полосы и при относительно минимальных расходах со стороны операторов аэропортов.
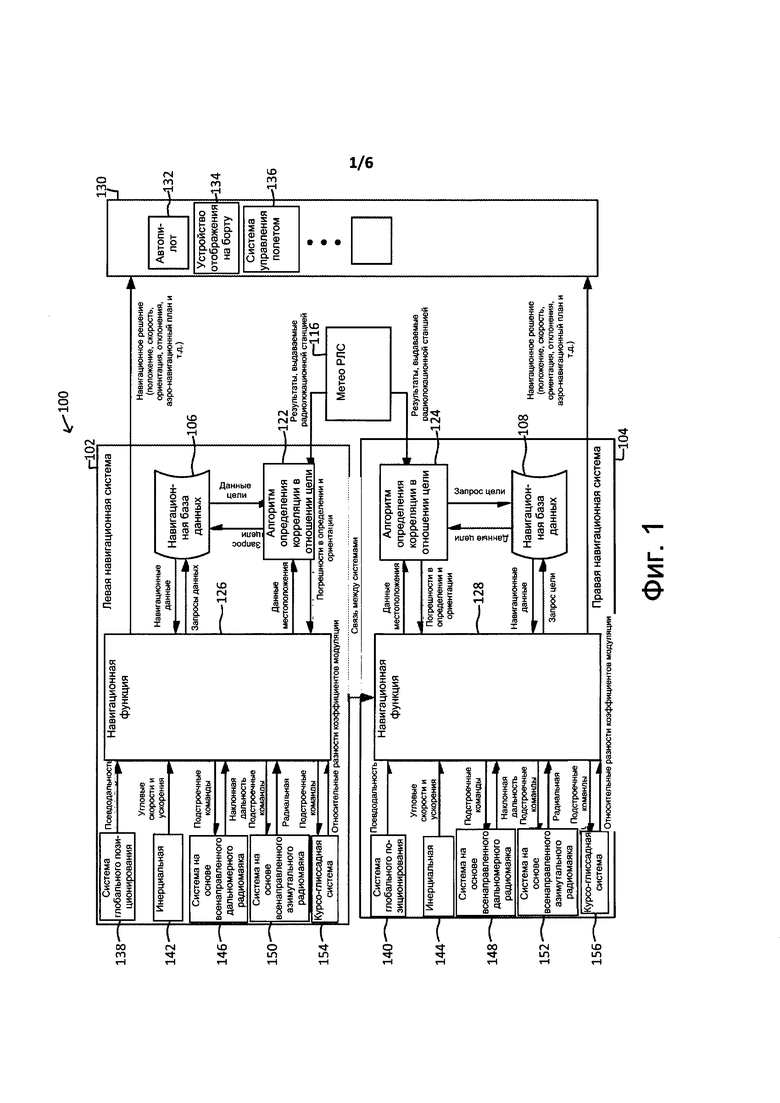
[0019] На ФИГ. 1 показана функциональная блок-схема приведенного в качестве примера варианта реализации системы 100 для управления летательным аппаратом 110, чтобы обеспечить точный заход на посадку и посадку на взлетно-посадочную полосу 112 в любых метеоусловиях в соответствии с раскрытием настоящего изобретения. В приведенном в качестве примера варианте реализации по ФИГ. 1, система 100 управления содержит пару по существу идентичных навигационных систем, а именно, "левую" навигационную систему 102 и "правую" навигационную систему 104, которые работают с избыточностью, т.е. параллельно друг с другом, в целях надежности и безопасности. Каждая из работающих с избыточностью навигационных систем 102 и 104 содержит базу навигационных данных 106 или 108, в которой сохранены данные, существенные для навигации летательного аппарата 110, включая данные об относительных положении и ориентации, описанные ниже со ссылками на ФИГ. 2-5.
[0020] На ФИГ. 2 показан вид сверху летательного аппарата 110, приближающегося к взлетно-посадочной полосе 112, с множеством радиолокационных целей 114, расположенных в пределах области возле взлетно-посадочной полосы 112. В соответствии с настоящим изобретением радиолокационные цели 114 могут содержать "искусственные" цели, например здания, водяные, радио- или телевизионные вышки, двугранные или трехгранные радиолокационные "уголковые отражатели" известных типов или, в качестве альтернативы, "природные" цели, например холмы, долины, озера, карьеры или т.п. В смысле положений настоящего документа радиолокационные цели 114 предпочтительно содержат радиолокационные уголковые отражатели, поскольку они закреплены, относительно просты и недороги в изготовлении, установке и обслуживании, и поскольку они обеспечивают создание относительно надежных отраженных радиолокационных сигналов или отражений при известных относительно высоких и согласованных уровнях сигнала по сравнению с сигналами других искусственных или природных отражателей.
[0021] Как раскрыто более подробно ниже, желательно получать и сохранять в базах данных 106 и 108 летательного аппарата 110 определенные пространственные данные, относящиеся к летательному аппарату 110, взлетно-посадочной полосе 112 и радиолокационным целям 114. Бортовая база данных содержит места расположения нескольких радиолокационных отражательных целей в аэропорту назначения. В частности, эти данные соответствуют относительным положениям, относительно друг друга и взлетно-посадочной полосы 112, радиолокационных целей 114 и необходимой ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112. Данные о цели 114 и взлетно-посадочной полосе 112 могут быть получены, например, наблюдением за радиолокационными целями 114 и взлетно-посадочной полосой 112 с использованием обычных технических средств наблюдения, а обычно может быть задана необходимая ориентация летательного аппарата 110 относительно взлетно-посадочной полосы, например в момент касания взлетно-посадочной полосы.
[0022] Как показано на ФИГ. 1, приведенная в качестве примера система 100 управления также содержит радиолокационную станцию 116, например метеорологическую радиолокационную станцию такого типа, который обычно размещается на борту современного коммерческого реактивного самолета. Как раскрыто ниже, радиолокационная станция 116, в дополнение к выполнению обычных функций предотвращения столкновений и вскрытия метеорологической обстановки, может также функционировать в качестве важного дополнения к навигационной системе 102 и 104 для обеспечения наведения при заходе на посадку и посадки практически на любую взлетно-посадочную полосу в любых метеоусловиях.
[0023] Таким образом, как показано на ФИГ. 3, радиолокационная станция 116 может быть выполнена с возможностью сканирования, обнаружения и выработки данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата 110, множества отраженных радиолокационных сигналов или отражений 118 от указанной области возле взлетно-посадочной полосы 110, включая отражения от радиолокационных целей 114. Метеорологическая радиолокационная станция сканирует район и получает возвратные сигналы от точек самого сильного отражения, к которым относятся цели-отражатели и другие источники отражения. Как видно из сравнения ФИГ. 2 и 3, радиолокационные отражения 118 луча 120 радиолокационной станции, возвращаемые от указанной области сканируемого радиолокационной станцией 116, могут содержать, и обычно содержат, другие радиолокационные отражения 118, возникающие в результате создания радиолокационных помех наземными объектами и другими отражательными поверхностями в пределах сканируемой области, что может привести к использованию неверных данных о положении и ориентации, получаемых исходя из отраженных радиолокационных сигналов 118. Соответственно, перед тем, как отражения 118 от радиолокационных целей 114 могут быть использованы для точного и надежного управления летательным аппаратом 110, сначала необходимо отличить радиолокационные данные, соответствующие фактическим радиолокационным целям 114, от паразитных радиолокационных данных, соответствующих другим отражающим объектам.
[0024] Как показано на ФИГ. 1, эта функция отличения может быть реализована парой корреляторов 122 и 124, размещенных соответственно в каждой из навигационных систем 102 и 104 летательного аппарата 100. В одном предпочтительном варианте реализации изобретения каждый из корреляторов 122 и 124 может содержать программное обеспечение, запускаемое на компьютере и содержащее алгоритм определения корреляции в отношении цели, который соотносит соответствующие положения радиолокационных отражений 118 относительно друг друга, полученные посредством радиолокационной станции 116, и соответствующие положения радиолокационных целей 114 относительно друг друга, предварительно сохраненные в базах данных 106 и 108 летательного аппарата 110. Существует несколько алгоритмов определения корреляции в отношении цели, которые могут быть использованы для отличения данных, соответствующих радиолокационным целям 114 от других данных, соответствующих радиолокационным отражениям 118.
[0025] Например, высокий коэффициент корреляции между соответствующими положениями сканируемых радиолокационных целей 114 и сохраненных радиолокационных целей 114 может указывать на правильность радиолокационных данных, соответствующих положениям сканируемых радиолокационных целей, а небольшой или даже отрицательный коэффициент корреляции может указывать на соответствие радиолокационных данных другим объектам, а не истинным целям 114. Поскольку соотношение между соответствующим положениям целей 114 является линейным, коэффициенты корреляции, полученные посредством алгоритма определения корреляции для корреляторов 122 и 124, могут содержать, например, хорошо известный коэффициент корреляции Пирсона.
[0026] На ФИГ. 4 показан вид сверху летательного аппарата 110 и области по ФИГ. 3 с радиолокационными отражениями 118, соответствующими радиолокационным целям 114, которые отличают от других радиолокационных отражений 118, возвращаемых от указанной области, с использованием алгоритма определения корреляции в отношении цели. Алгоритмом определения корреляции определяют, какие отражения соответствуют фактическим целям.
[0027] Как показано на ФИГ. 5, после определения положения и ориентации фактических радиолокационных целей 114 относительно радиолокационной станции 116, любые разности или погрешности в определении и ориентации летательного аппарата 110 относительно целей 114 и, следовательно, взлетно-посадочной полосы 110, могут быть оценены математически исходя из данных радиолокационных сигналов, отраженных от цели и сохраненных данных о цели, с использованием хорошо известных арифметических и тригонометрические преобразований. Как показано на ФИГ. 1, для этой цели каждая из навигационных систем 102 и 104 летательного аппарата 110 может быть оснащена навигационным компьютером 126 или 128. Разность между отражениями от радиолокационного рефлектора и местами расположения цели из базы используют для вычисления погрешностей в определении положения и ориентации. Вычисленные данных определения" погрешностей" или "разностей" могут быть использованы для управления летательным аппаратом 110 для выполнения точного захода на посадку и посадки на взлетно-посадочную полосу 112 в любых метеоусловиях при взаимодействии с обычной навигационной системой обеспечения захода на посадку и посадки, как раскрыто более подробно ниже.
[0028] Например, как показано на ФИГ. 1, система 100 управления может содержать группу внешних систем 130, в том числе автопилот 132, одно или более устройств 134 отображения, систему 136 управления полетом (FMS) и т.п. Таким образом, в одном варианте реализации изобретения автопилот 132 может быть выполнен с возможностью управления летательным аппаратом 110 в соответствии с вычисленными данными определения погрешностей или разностей. В смысле положений настоящего документа, "управление" означает регулирование прямолинейного перемещения центра тяжести (CG) летательного аппарата 110 и угловое перемещение летательного аппарата относительно каждой из осей тангажа, рыскания и крена летательного аппарата 110.
[0029] В другом варианте реализации изобретения устройство 134 отображения, которое может содержать так называемый "индикатор на лобовом стекле" (HUD), может быть выполнено с возможностью создания и предоставления пилоту летательного аппарата 110 визуального представления данных определения погрешностей или разностей, в том числе искусственное представление взлетно-посадочной полосы 112, как показано на ФИГ. 5, и управление летательным аппаратом 110 может быть осуществлено пилотом вручную с использованием устройства 134 отображения.
[0030] Как раскрыто выше, современные коммерческие летательные аппараты 110, как правило, оснащены различными традиционными системами, используемыми для обеспечения функций навигации, захода на посадку и/или посадки на взлетно-посадочную полосу. Как показано в конкретном приведенном в качестве примера варианте реализации по ФИГ. 1, эти традиционные системы могут содержать, например, работающие с избыточностью пары глобальных систем 138, 140 местоопределения (GPS), инерциальных навигационных систем (INS) 142, 144, систем 146, 148 на основе всенаправленного дальномерного радиомаяка (DME), систем 150, 152 на основе всенаправленного азимутального радиомаяка и курсо-глиссадных систем (ILS) 154, 156. Как раскрыто выше, одна или более из этих систем могут быть выполнены с возможностью установления положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 независимо от указанной радиолокационной станции 116, и возможностью использования этого установления для выполнения в любых метеоусловиях точного захода на посадку и посадки на взлетно-посадочную полосу 112 в соответствующих условиях.
[0031] Однако, если при этом также доступны положение и ориентация летательного аппарата 110 относительно взлетно-посадочной полосы 112, независимо оцененные радиолокационной станцией 116, как указано выше, разность между оценочным и установленным положениями может быть вычислена и использована для управления летательным аппаратом 110 в соответствии с указанной разностью. Иными словами, раскрытая выше радиолокационная система захода на посадку и посадки может быть использована в качестве "вспомогательной" для обычной системы захода на посадку и посадки летательного аппарата 110, и при этом предлагаемая радиолокационная система может быть использована для исправления любых погрешностей в определении положения и ориентации, определяемых обычной системой. Например, вклад каждой из двух независимых систем в определение "фактических" положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 может быть взвешен в соответствии с достоверностью соответствующих надежности и точности этих двух систем, которые могут изменяться, например, в зависимости от расстояния между летательным аппаратом 110 и взлетно-посадочной полосой 112.
[0032] На ФИГ. 6 представлена блок-схема приведенного в качестве примера варианта реализации способа 200 управления летательным аппаратом 110 в соответствии с раскрытием настоящего изобретения. Как раскрыто выше, способ 200 начинают на этапе S1 c сохранения данных в базах данных 106 и 108 летательного аппарата 110. Как раскрыто выше, данные содержат относительные положения, относительно друг друга и взлетно-посадочной полосы 112, множества радиолокационных целей 114, расположенных в пределах области возле взлетно-посадочной полосы 112, а также необходимую ориентацию летательного аппарата 110 относительно взлетно-посадочной полосы 112.
[0033] На этапе S2 сканируют область возле взлетно-посадочной полосы 112 с помощью радиолокационной станции 116 летательного аппарата 110 для получения радиолокационных данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата 110, множества отраженных радиолокационных сигналов или отражений 118 от указанной области, включая отражения от радиолокационных целей 114. После этого отличают радиолокационные данные, соответствующие радиолокационным целям 114, от радиолокационных данных, соответствующих радиолокационным отражениям 118, с использованием корреляторов 122 и 124 и алгоритма определения корреляции в отношении цели, и
на этапе S3 положение и ориентацию летательного аппарата 110 относительно взлетно-посадочной полосы 112 оценивают с помощью навигационных компьютеров 126 и 138 с использованием сохраненных данных и радиолокационных данных, которые определены как соответствующие радиолокационным целям 114.
[0034] На этапе S4 положение и ориентацию летательного аппарата 110 относительно взлетно-посадочной полосы 112 устанавливают в связи с радиолокационной оценкой с использованием навигационных компьютеров 126 и 128 и данных, предоставленных по меньшей мере одной из обычных навигационных систем 138-156, и на этапе S5 вычисляют разность между оценочными положением и ориентацией и установленными положением и ориентацией, и эту разность вводят в автопилот 132 для осуществления управления летательным аппаратом 110 по меньшей мере частично в соответствии с указанной разностью.
[0035] На этапе S6, принимают решение относительно завершения процесса 200. Если "нет", процесс возвращают к этапу S2 для повторения описанных выше этапов S3-S5, и если "да", процесс завершают.
Кроме того, раскрытие настоящего изобретения содержит варианты реализации согласно следующим пунктам:
Пункт 1. Способ управления летательным аппаратом, включающий:
- осуществление доступа к данным на борту летательного аппарата, содержащим:
относительные положения, относительно друг друга и взлетно-посадочной полосы, множества радиолокационных целей, расположенных в пределах области возле взлетно-посадочной полосы; и
необходимую ориентацию летательного аппарата относительно взлетно-посадочной полосы;
- сканирование указанной области с помощью радиолокационной станции, размещенной на борту летательного аппарата, для получения радиолокационных данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата, множества радиолокационных отражений от указанной области, включая отражения от радиолокационных целей;
- отличение радиолокационных данных, соответствующих радиолокационным целям, от радиолокационных данных, соответствующих радиолокационным отражениям;
- оценивание положения и ориентации летательного аппарата относительно взлетно-посадочной полосы с использованием сохраненных данных и радиолокационных данных, соответствующих радиолокационным целям;
- установление положения и ориентации летательного аппарата относительно взлетно-посадочной полосы с использованием навигационной системы, которая независима от указанной радиолокационной станции;
- вычисление разности между оценочным положением и установленным положением и
- вычисление разности между оценочной ориентацией и установленной ориентацией.
Пункт 2. Способ по пункту 1, согласно которому радиолокационная станция содержит метеорологическую радиолокационную станцию.
Пункт 3. Способ по пункту 1, согласно которому по меньшей мере одна из радиолокационных целей содержит двугранный или трехгранный радиолокационный отражатель.
Пункт 4. Способ по пункту 1, согласно которому указанное отличение включает соотнесение соответствующих положений радиолокационных целей относительно друг друга, полученных посредством радиолокационной станции, и относительных положений радиолокационных целей относительно друг друга, сохраненных на борту летательного аппарата.
Пункт 5. Способ по пункту 1, также включающий управление летательным аппаратом в соответствии с разностью положений и/или разностью ориентаций.
Пункт 6. Способ по пункту 5, согласно которому управление включает:
регулирование прямолинейного перемещения центра тяжести (CG) летательного аппарата и
регулирование углового перемещения летательного аппарата относительно каждой из осей тангажа, рыскания и крена летательного аппарата.
Пункт 7. Способ по пункту 5, согласно которому управление осуществляют автопилотом, размещенным на борту летательного аппарата.
Пункт 8. Способ по пункту 5, также включающий:
отображение оценочных положения и/или ориентации и/или установленных положения и/или ориентации на устройстве отображения, размещенном на борту летательного аппарата; и
осуществление ручного управления с использованием устройства отображения.
Пункт 9. Способ по пункту 1, согласно которому осуществление доступа также включает:
наблюдение за радиолокационными целями и взлетно-посадочной полосой для получения указанных данных и
сохранение указанных данных в базе данных летательного аппарата.
Пункт 10. Способ по пункту 1, также включающий по меньшей мере одно из таких действий:
исправление оценочного положения в зависимости от разности положений и/или
исправление оценочной ориентации в зависимости от разности ориентаций.
Пункт 11. Система для управления летательным аппаратом, содержащая:
- базу данных, размещенную на борту летательного аппарата и хранящую данные, соответствующие:
относительным положениям, относительно друг друга и взлетно-посадочной полосы, множества радиолокационных целей, расположенных в пределах области возле взлетно-посадочной полосы и
необходимой ориентации летательного аппарата относительно взлетно-посадочной полосы;
- радиолокационную станцию, размещенную на борту летательного аппарата и выполненную с возможностью сканирования, обнаружения и выработки данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата, множества радиолокационных отражений от указанной области, включая отражения от радиолокационных целей;
- коррелятор, расположенный на борту летательного аппарата и выполненный с возможностью отличения радиолокационных данных, соответствующих радиолокационным целям, от радиолокационных данных, соответствующих радиолокационным отражениям; и
- навигационную систему, размещенную на борту летательного аппарата и выполненную с возможностью:
оценивания положения и ориентации летательного аппарата относительно взлетно-посадочной полосы с использованием сохраненных данных и радиолокационных данных, соответствующих радиолокационным целям;
установления положения и ориентации летательного аппарата относительно взлетно-посадочной полосы независимо от указанной радиолокационной станции и с использованием по меньшей мере одной из таких систем, как глобальная система местоопределения, инерциальная навигационная система, система на основе всенаправленного дальномерного радиомаяка, система на основе всенаправленного азимутального радиомаяка и/или курсо-глиссадная система;
вычисления разности между оценочным положением и установленным положением;
вычисления разности между оценочной ориентацией и установленной ориентацией и
управления летательным аппаратом в соответствии по меньшей мере с разностями положений или ориентаций.
Пункт 12. Система по пункту 11, в которой коррелятор содержит:
компьютер и
содержащий алгоритм некратковременный машиночитаемый носитель, содержащий множество машиночитаемых инструкций, которые при исполнении одним или более процессорами компьютера, выполнен с возможностью побуждать компьютер:
соотносить относительные положения радиолокационных целей относительно друг друга, полученные посредством радиолокационной станции, и относительные положения радиолокационных целей относительно друг друга, сохраненные на борту летательного аппарата; и
отличать данные, соответствующие радиолокационным целям, от данных, соответствующих радиолокационным отражениям.
Пункт 13. Система по пункту 11, в которой радиолокационная станция содержит метеорологическую радиолокационную станцию.
Пункт 14. Система по пункту 11, также содержащая автопилот, выполненный с возможностью управления летательным аппаратом в соответствии с указанной разностью.
Пункт 15. Система по пункту 11, также содержащая устройство отображения, выполненное с возможностью создания и предоставления пилоту летательного аппарата визуального представления по меньшей мере одного из следующего:
оценочное положение летательного аппарата;
установленное положение летательного аппарата;
оценочная ориентация летательного аппарата;
установленная ориентация летательного аппарата;
разность положений и/или
разность ориентаций.
Пункт 16. Система по пункту 14, в которой устройство отображения содержит индикатор на лобовом стекле.
Пункт 17. Система по пункту 11, в которой навигационная система содержит множество идентичных или по существу схожих навигационных систем, работающих с избыточностью.
Пункт 18. Устройство для управления летательным аппаратом, содержащее:
- радиолокационную станцию, размещенную на борту летательного аппарата и выполненную с возможностью:
сканирования области, окружающей взлетно-посадочную полосу; и
создания радиолокационных данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата, множества радиолокационных отражений от указанной области;
- коррелятор, расположенный на борту летательного аппарата и выполненный с возможностью:
соотнесения радиолокационных данных и данных, сохраненных на борту летательного аппарата и содержащих относительные положения, относительно друг друга и взлетно-посадочной полосы, множества радиолокационных целей, расположенных в пределах указанной области, и необходимую ориентацию летательного аппарата относительно взлетно-посадочной полосы; и
отличения радиолокационных данных, соответствующих радиолокационным целям, от радиолокационных данных, соответствующих радиолокационным отражениям;
- навигационную систему, размещенную на борту летательного аппарата и выполненную с возможностью установления положения и ориентации летательного аппарата относительно взлетно-посадочной полосы независимо от указанной радиолокационной станции; и
- компьютер, размещенный на борту летательного аппарата и выполненный с возможностью:
оценивания положения и ориентации летательного аппарата относительно взлетно-посадочной полосы с использованием радиолокационных данных, соответствующих радиолокационным целям, и сохраненных данных о положении и ориентации летательного аппарата; и
вычисления разности между оценочными положением и ориентацией летательного аппарата и установленными положением и ориентацией летательного аппарата.
Пункт 19. Устройство по пункту 18, также содержащее контроллер, выполненный с возможностью управления перемещением летательного аппарата по меньшей мере частично в зависимости от указанной разности.
Пункт 20. Устройство по пункту 18, в котором навигационная система содержит по меньшей мере одну из таких систем, как глобальная система местоопределения, инерциальная навигационная система, система на основе всенаправленного дальномерного радиомаяка, система на основе всенаправленного азимутального радиомаяка и/или курсо-глиссадная система.
Как теперь очевидно некоторым специалистам в данной области техники, и зависимости от конкретного применения многие модификации, замены и изменения могут быть выполнены в материалах, устройствах, конфигурациях и способах применения летательного аппарата в любых метеоусловиях, системах точного управления, согласно раскрытию настоящего изобретения, не отступая от его сущности и объема. В свете этого, объем настоящего изобретения не следует рассматривать как ограниченный конкретными вариантами реализации, проиллюстрированными и описанными в настоящем документе, так как они являются лишь некоторыми примерами изобретения, наоборот, они должны полностью соответствовать прилагаемой формуле изобретения, приведенной далее, и ее функциональным эквивалентам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| Беспилотный летательный аппарат и способ безопасной посадки беспилотного летательного аппарата | 2016 |
|
RU2712716C2 |
| Система захода и посадки на взлётно-посадочную полосу воздушного судна с бортовой РЛС | 2019 |
|
RU2728208C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
Группа изобретений относится к способу и системе управления летательным аппаратом. Для управления летательным аппаратом обеспечивают доступ к бортовым данным относительных положений относительно друг друга и взлетно-посадочной полосы с использованием сохраненных данных и отраженных радиолокационных данных, соответствующих радиолокационным целям. Устанавливают положение летательного аппарата с использованием навигационной системы. Вычисляют разность между оценочным и установленным положением. Система содержит базу данных на борту летательного аппарата, радиолокационную станцию, коррелятор, выполненные с возможностью осуществления способа. Обеспечивается повышение точности наведения летательного аппарата при заходе на посадку. 3 н. и 17 з.п. ф-лы, 6 ил.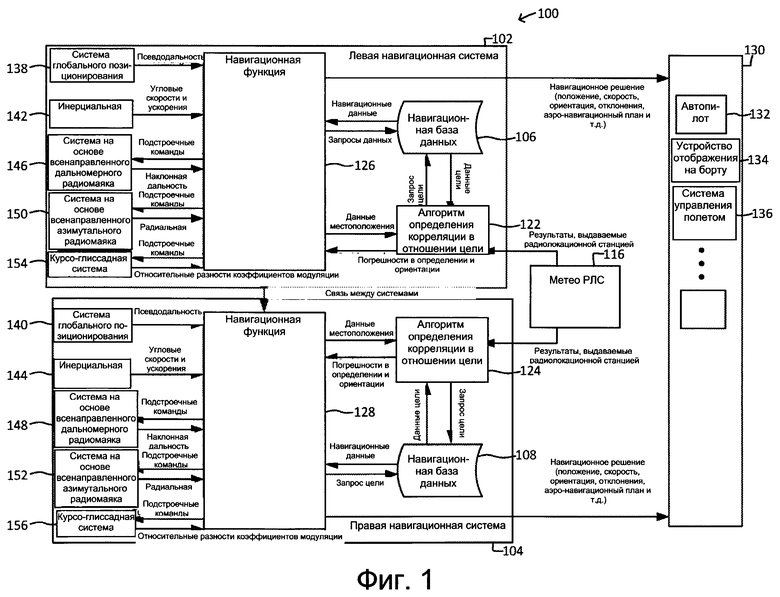
1. Способ управления летательным аппаратом 110, включающий:
- осуществление доступа к данным на борту летательного аппарата 110, содержащим:
относительные положения, относительно друг друга и взлетно-посадочной полосы 112, множества радиолокационных целей 114, расположенных в пределах области возле взлетно-посадочной полосы 112; и
необходимую ориентацию летательного аппарата 110 относительно взлетно-посадочной полосы 112;
- сканирование указанной области с помощью радиолокационной станции, размещенной на борту летательного аппарата 110, для получения радиолокационных данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата 110, множества радиолокационных отражений 118 от указанной области, включая отражения от радиолокационных целей 114;
- отличение радиолокационных данных, соответствующих радиолокационным целям 114, от радиолокационных данных, соответствующих радиолокационным отражениям 118;
- оценивание положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 с использованием сохраненных данных и радиолокационных данных, соответствующих радиолокационным целям 114;
- установление положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 с использованием навигационной системы 102, 104, которая независима от указанной радиолокационной станции;
- вычисление разности между оценочным положением и установленным положением и
- вычисление разности между оценочной ориентацией и установленной ориентацией.
2. Способ по п. 1, согласно которому радиолокационная станция содержит метеорологическую радиолокационную станцию 116.
3. Способ по п. 1, согласно которому по меньшей мере одна из радиолокационных целей 114 содержит двугранный или трехгранный радиолокационный отражатель 118.
4. Способ по п. 1, согласно которому указанное отличение включает соотнесение относительных положений радиолокационных целей 114 относительно друг друга, полученных посредством радиолокационной станции, и относительных положений радиолокационных целей 114 относительно друг друга, сохраненных на борту летательного аппарата 110.
5. Способ по п. 1, также включающий управление летательным аппаратом 110 в соответствии с разностью положений и/или разностью ориентаций.
6. Способ по п. 5, согласно которому управление включает:
регулирование прямолинейного перемещения центра тяжести летательного аппарата 110 и
регулирование углового перемещения летательного аппарата 110 относительно каждой из осей тангажа, рыскания и крена летательного аппарата 110.
7. Способ по п. 5, согласно которому управление осуществляют автопилотом 132, размещенным на борту летательного аппарата 110.
8. Способ по п. 5, также включающий:
отображение 134 оценочного положения и/или ориентации и/или установленным положению и/или ориентации на устройстве 134 отображения, размещенном на борту летательного аппарата 110; и
осуществление ручного управления с использованием устройства 134 отображения.
9. Способ по п. 1, согласно которому осуществление доступа также включает:
наблюдение за радиолокационными целями 114 и взлетно-посадочной полосой 112 для получения указанных данных и
сохранение указанных данных в базе данных 106, 108 летательного аппарата 110.
10. Способ по п. 1, также включающий по меньшей мере одно из таких действий, как:
исправление оценочного положения в зависимости от разности положений и/или
исправление оценочной ориентации в зависимости от разности ориентаций.
11. Система для управления летательным аппаратом 110, содержащая:
- базу данных, размещенную на борту летательного аппарата 110 и хранящую данные, соответствующие:
относительным положениям, относительно друг друга и взлетно-посадочной полосы 112, множества радиолокационных целей 114, расположенных в пределах области возле взлетно-посадочной полосы 112; и
необходимой ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112;
- радиолокационную станцию, размещенную на борту летательного аппарата 110 и выполненную с возможностью сканирования, обнаружения и выработки данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата 110, множества радиолокационных отражений 118 от указанной области, включая отражения от радиолокационных целей 114;
- коррелятор, расположенный на борту летательного аппарата 110 и выполненный с возможностью отличения радиолокационных данных, соответствующих радиолокационным целям 114, от радиолокационных данных, соответствующих радиолокационным отражениям 118; и
- навигационную систему 102, 104, размещенную на борту летательного аппарата 110 и выполненную с возможностью:
оценивания положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 с использованием сохраненных данных и радиолокационных данных, соответствующих радиолокационным целям 114;
установления положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 независимо от указанной радиолокационной станции и с использованием по меньшей мере одной из таких систем, как глобальная система 138, 140 местоопределения, инерциальная навигационная система 142, 144, система 146, 148 на основе всенаправленного дальномерного радиомаяка, система 150, 152 на основе всенаправленного азимутального радиомаяка и/или курсо-глиссадная система 154, 156;
вычисления разности между оценочным положением и установленным положением;
вычисления разности между оценочной ориентацией и установленной ориентацией и
управления летательным аппаратом 110 в соответствии с разностями положений и/или ориентаций.
12. Система по п. 11, в которой коррелятор содержит:
компьютер и
содержащий алгоритм 122, 124 некратковременный машиночитаемый носитель, содержащий множество машиночитаемых инструкций, которые выполнены с возможностью при их исполнении одним или более процессорами компьютера побуждать компьютер:
соотносить относительные положения радиолокационных целей 114 относительно друг друга, полученные посредством радиолокационной станции, и относительные положения радиолокационных целей 114 относительно друг друга, сохраненные на борту летательного аппарата 110; и
отличать данные, соответствующие радиолокационным целям 114, от данных, соответствующих радиолокационным отражениям.
13. Система по п. 11, в которой радиолокационная станция содержит метеорологическую радиолокационную станцию.
14. Система по п. 11, также содержащая автопилот 132, выполненный с возможностью управления летательным аппаратом 110 в соответствии с указанной разностью.
15. Система по п. 11, также содержащая устройство 134 отображения, выполненное с возможностью создания и предоставления пилоту летательного аппарата 110 визуального представления по меньшей мере одного из следующего:
оценочное положение летательного аппарата 110;
установленное положение летательного аппарата 110;
оценочная ориентация летательного аппарата 110;
установленная ориентация летательного аппарата 110;
разность положений и/или
разность ориентаций.
16. Система по п. 15, в которой устройство 134 отображения содержит индикатор на лобовом стекле.
17. Система по п. 11, в которой навигационная система 102, 104 содержит множество идентичных или по существу схожих навигационных систем 102, 104, работающих с избыточностью.
18. Устройство для управления летательным аппаратом 110, содержащее:
- радиолокационную станцию, размещенную на борту летательного аппарата 110 и выполненную с возможностью:
сканирования области, окружающей взлетно-посадочную полосу 112; и
создания радиолокационных данных, соответствующих относительным положениям, относительно друг друга и летательного аппарата 110, множества радиолокационных отражений от указанной области;
- коррелятор, расположенный на борту летательного аппарата 110 и выполненный с возможностью:
соотнесения радиолокационных данных и данных, сохраненных на борту летательного аппарата 110 и содержащих относительные положения, относительно друг друга и взлетно-посадочной полосы 112, множества радиолокационных целей 114, расположенных в пределах указанной области, и необходимую ориентацию летательного аппарата 110 относительно взлетно-посадочной полосы 112; и
отличения радиолокационных данных, соответствующих радиолокационным целям 114, от радиолокационных данных, соответствующих радиолокационным отражениям 118;
- навигационную систему 102, 104, размещенную на борту летательного аппарата 110 и выполненную с возможностью установления положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 независимо от указанной радиолокационной станции; и
- компьютер, размещенный на борту летательного аппарата 110 и выполненный с возможностью:
оценивания положения и ориентации летательного аппарата 110 относительно взлетно-посадочной полосы 112 с использованием радиолокационных данных, соответствующих радиолокационным целям 114, и сохраненных данных о положении и ориентации летательного аппарата 110; и
вычисления разности между оценочными положением и ориентацией летательного аппарата 110 и установленными положением и ориентацией летательного аппарата 110.
19. Устройство по п. 18, также содержащее контроллер, выполненный с возможностью управления перемещением летательного аппарата 110 по меньшей мере частично в зависимости от указанной разности.
20. Устройство по п. 18, в котором навигационная система 102, 104 содержит по меньшей мере одну из таких систем, как глобальная система 138, 140 местоопределения, инерциальная навигационная система 142, 144, система 146, 148 на основе всенаправленного дальномерного радиомаяка, система 150, 152 на основе всенаправленного азимутального радиомаяка и/или курсо-глиссадная система 154, 156.
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2002 |
|
RU2229101C2 |
| Способ осенне-зимнего и весеннего содержания пчелосемей и устройство для осуществления этого способа | 1958 |
|
SU120077A1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| JP 0052051700 A, 25.04.1977 | |||
| JP 2013079816 A, 02.05.2013. | |||

