Предлагаемый способ управления может быть использован в космической технике при организации полетов пилотируемого космического корабля к Луне.
Известен способ парирования нештатной ситуации при срыве выполнения тормозного импульса, выбранный в качестве аналога, включающий безопасное возвращение экипажа на Землю. Такой способ был применен при полете космического корабля (КК) «Восток» 12 апреля 1961 г [1. Мировая пилотируемая космонавтика. История. Техника. Люди - под ред. Ю.М. Батурина, М, РТ Софт, 2005]. При срыве выполнения тормозного импульса для возвращения экипажа на Землю КК осуществляет движение по траектории с постоянным изменением высоты за счет воздействия атмосферы. При определении расчетной траектории полета параметры орбиты выведения выбирались таким образом, что в случае отказа тормозного двигателя спуск корабля осуществлялся бы по баллистической траектории за счет снижения высоты орбиты из-за аэродинамического торможения в течение 5-7 суток. Варьирование продолжительности аэродинамического торможения КК «Восток» определялось параметрами текущей плотности атмосферы. В случае плотной, или «твердой» атмосферы сход с орбиты за счет естественного торможения занимал 3 суток, а в случае слабой, или «жидкой» атмосферы происходил в течение 9-10 суток [1].
Недостатком этого способа является то, что его реализация возможна только для космических аппаратов, находящихся на низких околоземных орбитах, траектория движения, которых подвержена сильному влиянию атмосферы.
Известен способ управления американским КК «Апполон-8» при полете к Луне [2. В.И. Левантовский «Механика космического полета в элементарном изложении», М, Наука, 1974], выбранный в качестве прототипа, включающий приложение к космическому кораблю, находящемуся на околоземной орбите отлетного импульса VОТЛ, формирующего траекторию перелета к Луне с последующим приложением тормозного импульса VТОРМ в окрестности Луны для перехода космического корабля на заданную окололунную орбиту. Параметры траектории КК «Апполон-8» выбирались исходя из условия свободного возвращения, обеспечивающем в случае невыполнения тормозного импульса VТОРМ безопасное возвращение экипажа на Землю после облета Луны.
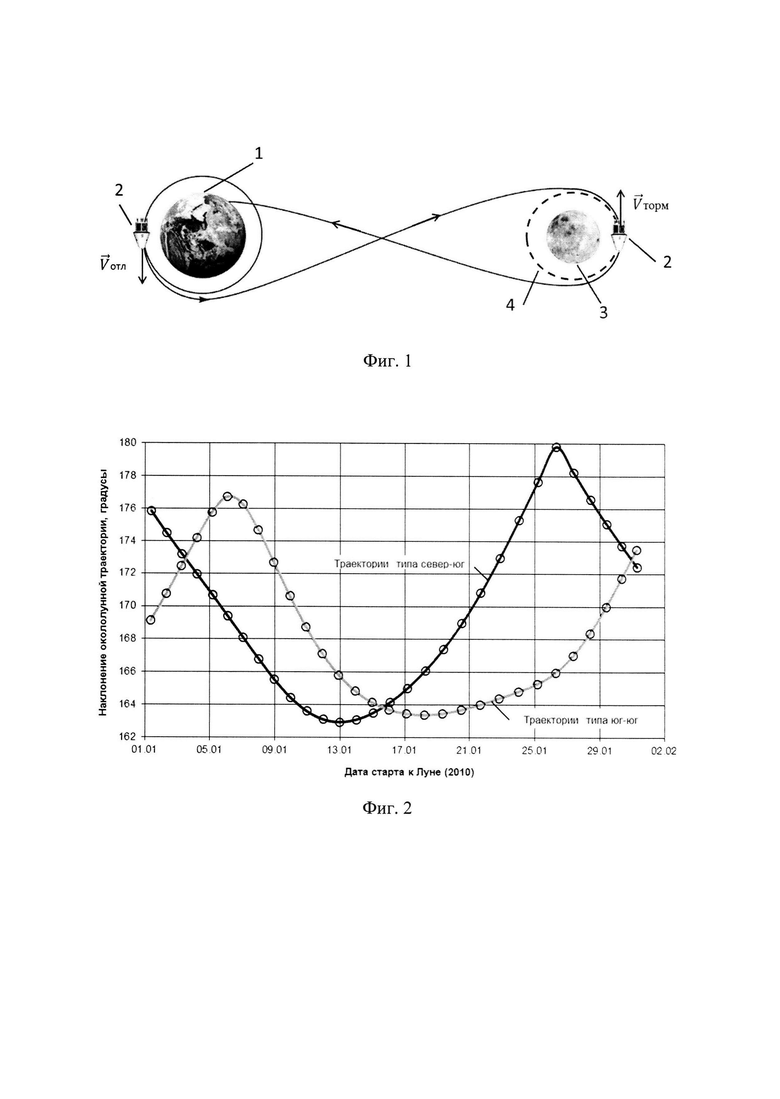
На фиг. 1 приведена схема полета прототипа КК «Апполон-8» с околоземной орбиты на окололунную с возможностью возврата КК на Землю при отсутствии выдачи тормозного импульса у Луны, где: 1 - Земля, 2 - КК, 3 - Луна, 4 - окололунная орбита. Для перехода КК 2 на транслунную орбиту выполняется отлетный импульс. Далее, по достижению переселения, КК выполняет тормозной импульс для перехода на окололунную орбиту 4. В случае нештатной ситуации (НШС), связанной с невыполнением тормозного импульса КК по траектории свободного возвращения совершает облет Луны 3 и возвращается на Землю 1.
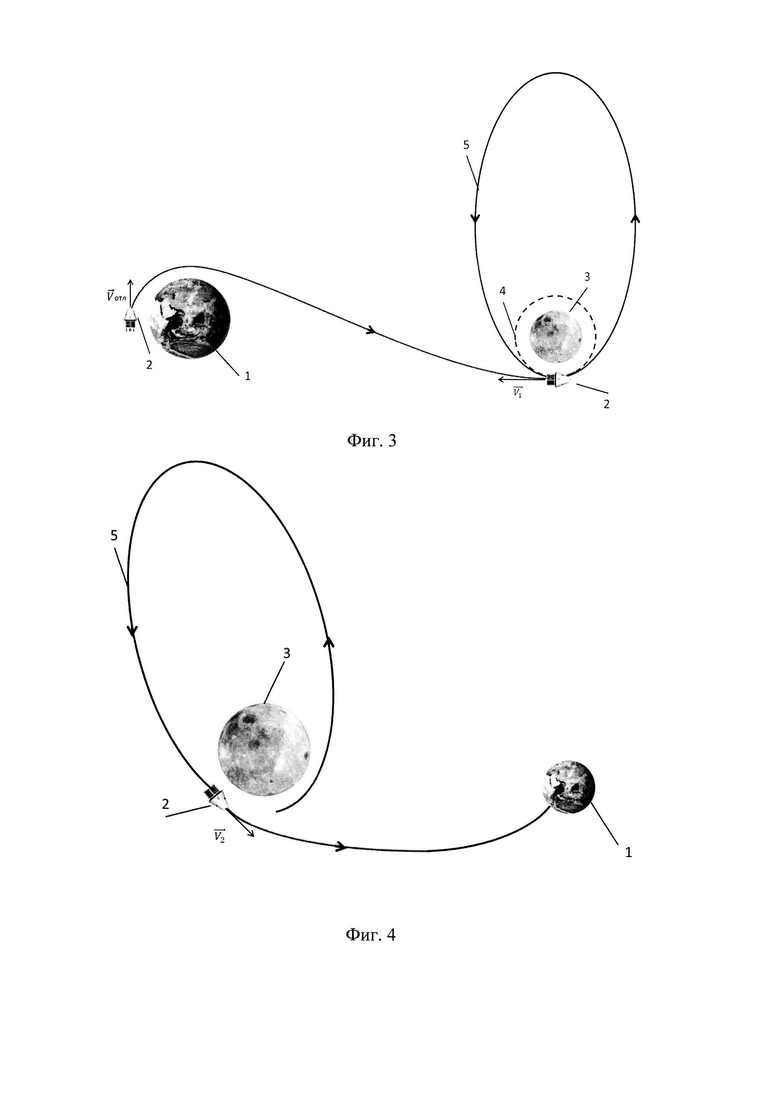
Основным недостатком такого способа является его применимость только для траекторий, имеющих небольшое наклонение относительно экватора Луны. Так, в случае полета КК «Апполон-8» наклонение орбиты к плоскости экватора Луны составляло около 12° [1]. Необходимость в малом наклонении относительно Луны определяется тем, что возврат КК к Земле осуществляется через узкую область на грависфере Луны, расположенной в приэкваториальной относительно Луны области. Это, в свою очередь, определяет необходимость входа в грависферу Луны также с минимальным наклонением относительно экватора Луны [3. Е.В. Тарасов «Космонавтика. Механика полета и баллистическое проектирование КЛА», М, Машиностроение, 1977]. Для примера, на фиг. 2 представлен график с зависимостями наклонения окололунной орбиты от даты старта к Луне на полном периоде обращения Луны вокруг Земли в январе 2010 года при отлетном наклонении 51.6°, соответствующем запуску российских КК. Кривые на графике соответствуют облету Луны по траекториям типа север-юг (перелет через Северное и возвращение после облета через Южное полушария Земли) и типа юг-юг. Как видно из графика, наклонения к плоскости экватора Луны составляют не более 180°-162°=18°. Так как изменение наклонения Луны относительно плоскости эклиптики не превышает 5° [2], то изменение дат для облета Луны может лишь незначительно увеличить величину предельно возможных наклонений траектории к экватору Луны (не более чем на 5°).
Техническим результатом изобретения является возможность возвращения КК на Землю от Луны при невыполнении тормозного импульса у Луны и в случае его полета на окололунную орбиту с большим наклонением.
Технический результат достигается благодаря тому, что в способе управления КК при полете к Луне, включающем приложение к КК, находящемуся на околоземной орбите отлетного импульса VОТЛ, формирующего траекторию перелета к Луне с последующим приложением тормозного импульса VТОРМ в окрестности Луны для перехода КК на заданную окололунную орбиту, в отличие от известного, в случае НШС, связанной со срывом приложения тормозного импульса VТОРМ, выполняют тормозной импульс V1<<VТОРМ, величину которого определяют исходя из перевода КК на высокоэллиптическую окололунную орбиту с периодом обращения Т, после чего, через время ΔT выполняют отлетный импульс V2 для возвращения КК к Земле, при этом ΔT и Т удовлетворяют тождеству: ΔT=(2n-1)⋅T/2+Δt, где
n - натуральное число, характеризующее количество прохождений апоселения при нахождении на высокоэллиптической окололунной орбите,
Δt - время, определяемое от последнего прохождения апоселения высокоэллиптической орбиты до момента, соответствующего выполнению минимального по величине отлетного импульса V2 к Земле.
Предлагаемый способ рассмотрим на примере КК, который с околоземной орбиты по траектории перелета к Луне должен быть переведен на полярную окололунную орбиту с наклонением 90°. Необходимость в такой орбите определяется интересом к освоению Южного полюса Луны в кратерах которого расположены большие запасы льда.
Технический результат в предлагаемом способе управления достигается за счет того, что на околоземную орбиту выводится связка, состоящая из КК, разгонного блока (РБ) и межорбитального блока (МБ). С помощью РБ к связке прикладывается отлетный импульс VОТЛ, формирующий траекторию перелета к Луне с прохождением Луны на заданном расстоянии и с полярным наклонением 90°. После выполнения отлетного импульса РБ отделяется от связки. По достижению заданного расстояния от Луны должен включаться МБ для приложения к связке тормозного импульса VТОРМ, переводящий КК на заданную полярную окололунную орбиту. В случае НШС, связанной со срывом приложения тормозного импульса VТОРМ МБ отделяется, а КК с помощью собственной двигательной установки (ДУ) выполняет тормозной импульс V1, который много меньше по величине, чем VТОРМ. Величину V1 определяют исходя из перевода КК на высокоэллиптическую окололунную орбиту с периодом обращения Т, обеспечивающем оптимальные условия для последующего выполнения через время ΔT отлетного импульса V2 для возвращения КК к Земле.
Сущность изобретения поясняется фиг. 1÷5, где:
на фиг. 1 приведена схема операций в прототипе - перелета КК «Аполлон-8» с околоземной орбиты на окололунную орбиту,
на фиг. 2 представлена зависимость наклонения окололунной орбиты от даты старта к Луне при отлетном наклонении 51.6°, соответствующем запуску российских КК,
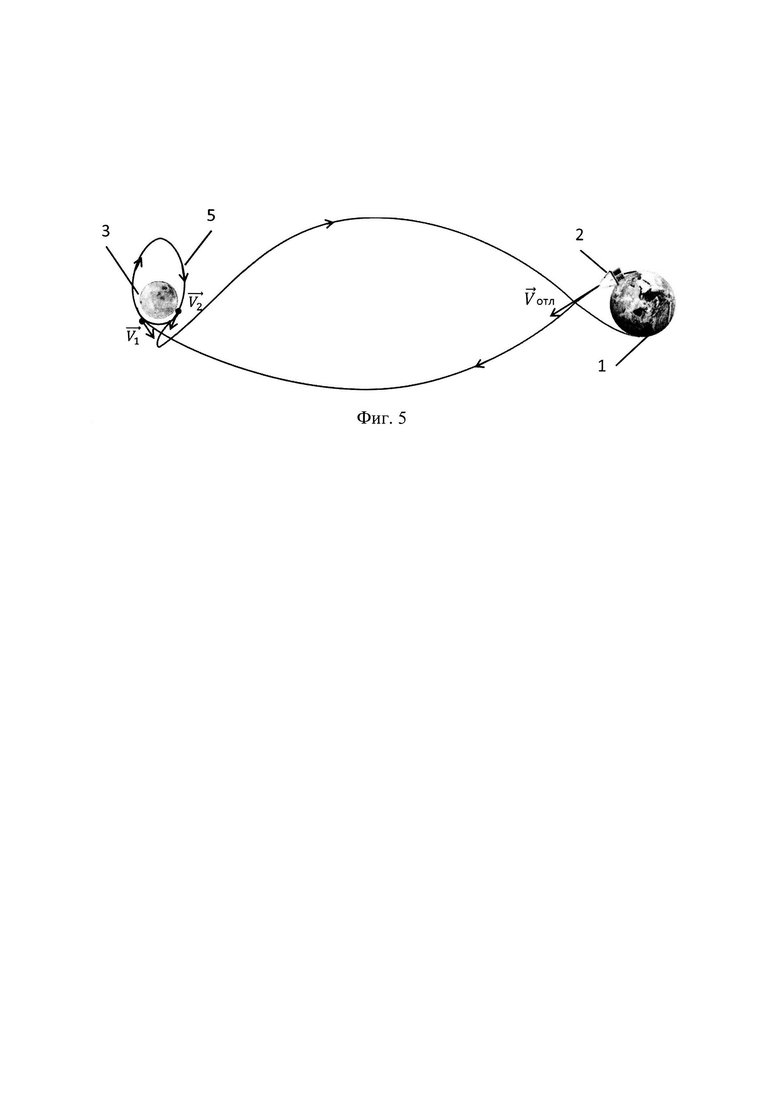
на фиг. 3 представлена схема, включающая перелет с околоземной орбиты к Луне с последующим переходом на высокоэллиптическую окололунную орбиту.
на фиг. 4 представлена траектория движения КК по высокоэллиптической окололунной орбите с последующим переходом на траекторию отлета к Земле,
на фиг. 5 представлена полная траектория движения КК к Луне с переходом на высокоэллиптическую окололунную орбиту и дальнейшим возвращением на Землю во вращающейся системе координат Земля-Луна [2], На этих фиг. отмечены следующие позиции:
1 - Земля, 2 - КК, 3 - Луна, 4 - окололунная орбита, 5 - высокоэллиптическая окололунная орбита,
На фиг. 3-5 представлена схема полета по предлагаемому способу.
На фиг. 3 средствами РБ выполняется разгонный импульс VОТЛ для перевода КК 2 на транслунную орбиту. По достижению апоселения в случае невыполнения средствами МБ тормозного импульса для перехода на окололунную орбиту 4 КК выполняет тормозной импульс V1 для перехода на высокоэллиптическую окололунную орбиту 5.
На фиг. 4 КК 2 спустя время Δt после прохода апоселения по высокоэллиптической окололунной орбите 5 выполняет отлетный импульс V2 для перехода на траекторию полета к Земле.
На фиг. 5 представлена полная траектория движения КК 2 во вращающейся системе координат Земля - Луна по предлагаемому способу, включающая перелет КК от Земли 1 к Луне 5, переход на высокоэллиптическую орбиту 5 и возвращения КК на Землю. Траектория получена при проведении расчетов на программном комплексе Satellite Tool Kit 9.2.2.
Рассмотрим пример. Допустим необходимо вывести КК на круговую полярную окололунную орбиту высотой 200 км. Рассмотрим решение этой задачи в импульсной постановке. Первоначально связка, состоящая из РБ, МБ и КК выводится на околоземную орбиту высотой 200 км. Для отлета к Луне потребуется с помощью РБ приложение к связке отлетного импульса VОТЛ около 3150 м/с [2]. После этого РБ отделяется. Момент приложения отлетного импульса выбирается из условия перелета на лунную полярную орбиту высотой 200 км для чего при прохождении перигея лунной орбиты с помощью МБ к связке должен быть приложен тормозной импульс VТОРМ величиной около 900 м/с [2]. По штатной программе предполагается, что по завершению программы полета на лунной орбите за счет собственного топлива КК выполнит отлетный импульс для возвращения на Землю также величиной около 900 м/с [2]. В случае НШС, связанной с невыполнением этого импульса, МБ отделяется от КК, после чего КК с помощью собственной ДУ за счет топлива, предназначенного для отлета к Земле, выполняет тормозной импульс V1 для перевода КК на высокоэллиптическую окололунную полярную орбиту (ВЭО). Величина этого импульса определяется исходя из обеспечения оптимальных условий по выполнению отлетного импульса V2 для перелета КК с ВЭО к Земле. Так как Луна обращается вокруг Земли со скоростью 13.2°/сут, то первое условие соответствует наступлению момента, когда плоскость ВЭО включает в себя оптимальное направление для выполнения отлетного импульса к Земле. Согласно [4. «Основы теории полета КА» под ред. Г.С. Нариманова, М, Машиностроение, 1972] угол между оптимальным направлением и линией Луна-Земля составляет около 60°. Вторым условием оптимальности является достижение КК через время ΔT после выполнения тормозного импульса V1 положения на орбите ВЭО, соответствующему минимальной величине отлетного импульса V2. В соответствии с [4], длительность ΔT составляет около 4 суток. Таким образом, для обеспечения двух условий оптимальности тормозной импульс V1 выбирается исходя из перехода КК на ВЭО с периодом Т, величина которого удовлетворяет тождеству: ΔT=(2n-1)⋅T/2+Δt, где n - натуральное число, характеризующее количество прохождений апоселения при нахождении на высокоэллиптической окололунной орбите, а Δt - время, определяемое от последнего прохождения апоселения высокоэллиптической орбиты до момента, соответствующего выполнению минимального по величине отлетного импульса V2 к Земле.
Определим затраты суммарной характеристической скорости V∑=V1+V2 на выполнение предлагаемого способа возвращения КК к Земле в случае НШС при различных значениях числа n, полученное при использовании программного комплекса Satellite Tool Kit 9.2.2. В качестве расчетного случая рассматривалась перелетная траектория от Земли с выполнением отлетного импульса 29 декабря 2027 года в 04:34 (UTC) при длительности перелета 3.5д (дней) и высоте периселения 200 км при наклонении относительно плоскости экватора Луны 90°.
При n=1 КК сделает только одно прохождение апоселения ВЭО. Результаты расчетов показывают, что после выполнения импульса V1=256 м/c КК переходит на ВЭО с высотой апоселения Нα=48270 км и периодом Т=4.38д. Через 1.88д КК достигает апоселений ВЭО. Отличие этого времени от половины периода Т объясняется возмущением ВЭО со стороны Земли и Солнца. Затем через Δt=1.83д КК достигает положения на ВЭО для оптимального выполнения отлетного импульса V2 к Земле величиной V2=550 м/c. Полное время между двумя импульсами составит ΔТ=3.71д, а V∑=806 м/с.
При n=2 КК сделает два прохождения апоселения ВЭО. Результаты расчетов показывают, что после выполнения импульса V1=283 м/c КК переходит на ВЭО с высотой апоселения Нα=28420 км и периодом Т=2.11д. Через 3.05д КК второй раз достигает апоселений ВЭО. Затем через Δt=0.96д КК достигает точки для оптимального выполнения отлетного импульса V2 к Земле величиной V2=573 м/с. Полное время между двумя импульсами составит ΔТ=4.02д, a V∑=856 м/с.
При n=3 КК сделает три прохождения апоселения ВЭО. Результаты расчетов показывают, что после выполнения импульса V1=305 м/c КК переходит на ВЭО с высотой апоселения Нα=20780 км и периодом T=1.405d. Через 3.46д КК третий раз достигает апоселений ВЭО. Затем через Δt=0.556д КК достигает точки для оптимального выполнения отлетного импульса V2 к Земле величиной V2=595 м/с. Полное время между двумя импульсами составит ΔТ=4.096д, a V∑=900 м/с.
Представленный пример выполнения предложенного способа для различных значений n=1, 2, 3 показывает, что суммарная скорость V2 на выполнение импульсов перехода на ВЭО и отлета к Земле не превышает величины в 900 м/с, которые необходимы для выполнения отлетного импульса КК в случае реализации штатной схемы полета. Таким образом переход на ВЭО в случае НШС с последующим отлетом к Земле реализуем и позволяет прямой перелет с Земли на полярную окололунную орбиту.
Предлагаемый способ позволит выполнять перелет от Земли к Луне на окололунную орбиту с высоким наклонением к плоскости экватора Луны с гарантированным парированием НШС, связанной с невыполнением тормозного импульса при переходе КК на окололунную орбиту.
Предлагаемый способ может быть использован при доставке пилотируемого КК на полярную окололунную орбиту.
Изобретение относится к перелётам пилотируемых космических кораблей (КК) с околоземной орбиты на полярные и близкие к полярным окололунные орбиты. Способ включает выведение КК на траекторию перелета к Луне с прохождением Луны на заданном расстоянии и с наклонением, равным или близким 90°. В периселении должен быть приложен тормозной импульс VТОРМ для перевода КК на заданную полярную орбиту. В нештатной ситуации невыполнения импульса VТОРМ выполняет тормозной импульс V1<<VТОРМ для перехода КК на высокоэллиптическую окололунную орбиту. Величину V1 определяют исходя из обеспечения оптимальных условий выполнения отлетного импульса V2 для перелета КК с указанной высокоэллиптической орбиты к Земле. Техническим результатом является возможность возвращения КК от Луны к Земле при невыполнении заданного тормозного импульса у Луны, в случае перелёта КК на окололунную орбиту с большим наклонением. 5 ил.
Способ управления космическим кораблем при полете к Луне, включающий приложение к космическому кораблю, находящемуся на околоземной орбите, отлетного импульса Vотл, формирующего траекторию перелета к Луне, с последующим приложением тормозного импульса Vторм в окрестности Луны для перехода космического корабля на заданную окололунную орбиту, отличающийся тем, что в случае нештатной ситуации, связанной со срывом приложения тормозного импульса Vторм, выполняют тормозной импульс V1<<Vторм, величину которого определяют исходя из перевода космического корабля на высокоэллиптическую окололунную орбиту с периодом обращения Т, после чего через время ΔT выполняют отлетный импульс V2 для возвращения космического корабля к Земле, при этом ΔT и Т удовлетворяют условию
ΔT=(2n-1)⋅T/2+Δt,
где n - натуральное число, характеризующее количество прохождений апоселения при нахождении на высокоэллиптической окололунной орбите,
Δt - время, определяемое от последнего прохождения апоселения высокоэллиптической орбиты до момента, соответствующего выполнению минимального по величине отлетного импульса V2 к Земле.
| В.И | |||
| Левантовский | |||
| Механика космического полёта в элементарном изложении | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| "Наука" | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| СПОСОБ ВЫВЕДЕНИЯ СПУТНИКА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 1999 |
|
RU2164880C1 |
| СПОСОБ ВЫВЕДЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА НЕКОМПЛАНАРНЫЕ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ СИЛЫ ЛУННОГО ПРИТЯЖЕНИЯ | 1997 |
|
RU2219109C2 |
| Приспособление для перекатки колесных пар по железнодорожному пути | 1918 |
|
SU2665A1 |
| WO 2000013971 A2, 16.03.2000. | |||

