Заявляемое изобретение относится к области гидроакустической техники и предназначено для непрерывного автоматического контроля положения антенны гидроакустического средства автономного необитаемого подводного аппарата (АНПА) относительно водной поверхности.
Определение положения антенны гидроакустического средства относительно водной поверхности является важной задачей, решение которой позволяет своевременно заблокировать или ограничить работу гидроакустического средства на излучение при нахождении антенны в воздухе и, как следствие, исключить ее возможный отказ, вызванный разрушением электроакустического преобразователя в антенне.
Известно устройство контроля, представляющее собой датчик абсолютного давления, например, модель А-1200 компании «Wika Alexander Wiegand SE & Co.KG» (адрес сайта в интернете https://www.wika.ru) и построенное на сравнении результатов определения гидростатического давления с пороговым значением, применительно к решению рассматриваемой задачи - значением атмосферного давления или его допустимыми отклонениями, и формировании по результатам сравнения электрического кодированного сигнала.
К недостаткам данного устройства следует отнести его техническую сложность, зависимость от фактических значений атмосферного давления и его допустимых отклонений в районе плавания АНПА, информация о которых может отсутствовать либо быть получена только после всплытия аппарата, необходимость периодической поверки, опасность загрязнения приемного узла.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемым результатам является устройство, входящее в состав забрасываемого эхолота компании «Techsonic Industries, lnc.» (патент США N 6,693,847, опубликованный 17.02.2004 г.) и содержащее изолированные друг от друга погружные общий и сигнальный электроды, подтягивающий резистор, включенный между выходом сигнального электрода и источником постоянного напряжения, причем выход общего электрода подключен на «землю», а выход подтягивающего резистора - к соответствующему входу коммутатора, выходы которого связаны с исполнительными устройствами.
Принцип действия устройства-прототипа основан на разнице электропроводности воздуха и воды и заключается в преобразовании изменения электрического сопротивления между электродами, установленными выше антенны гидроакустического средства, в электрический сигнал заданного уровня, определяющий режим работы коммутатора, при замыкании электрической цепи в результате погружения электродов в воду.
Недостатком устройства-прототипа является низкая надежность, обусловленная тем, что устройство имеет фиксированную настройку на срабатывание, определяемую номинальным значением подтягивающего резистора при заданном пороговом значении электропроводности воды. Таким образом, если фактическая электропроводность воды в районе плавания АНПА окажется меньше порогового значения, то устройство может не сработать, а настройка устройства на срабатывание при минимально возможном значении электропроводности воды может привести к ложным срабатываниям, например, от увеличения токов утечки, вызванных наличием брызг или от конденсированных или выпадающих осадков.
Задача изобретения состоит в обеспечении надежного автоматического определения положения антенны гидроакустического средства АНПА относительно водной поверхности.
Технический результат заключается в снижении числа ложных срабатываний при движении АНПА по водной поверхности из-за таких факторов как наличие брызг, конденсированных или выпадающих осадков.
Для достижения технического результата в известное устройство, содержащее общий и первый сигнальный электроды, первый подтягивающий резистор, включенный между выходом первого сигнального электрода и источником постоянного напряжения, причем выход общего электрода подключен на «землю», введены новые признаки, а именно:
- введены второй сигнальный электрод и второй подтягивающий резистор, включенный между выходом второго сигнального электрода и источником постоянного напряжения;
- введен блок сравнения сигналов, входы которого соединены с выходами первого и второго подтягивающих резисторов, а выход подключен к соответствующему входу коммутатора, выходы которого связаны с блоком электроники гидроакустического средства и системой программного управления и контроля АНПА, при этом общий и первый сигнальный электроды установлены ниже, а второй сигнальный электрод - выше антенны гидроакустического средства.
Заявляемое устройство поясняется чертежами.
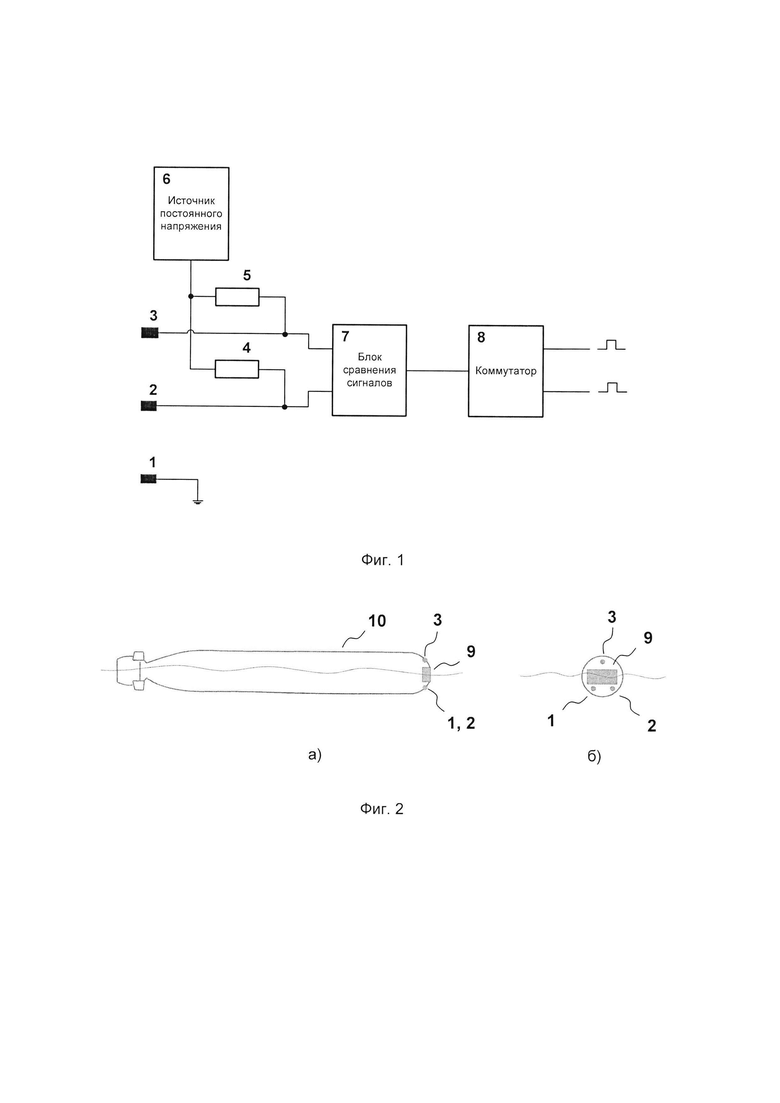
На фиг. 1 изображена функциональная схема заявляемого устройства.
На фиг. 2 приведена схема размещения электродов заявляемого устройства на АНПА, перемещающегося по водной поверхности, на примере антенны гидролокатора переднего обзора, а - вид сбоку, б - вид спереди.
Заявляемое устройство (фиг. 1) включает общий 1 электрод, первый 2 и второй 3 сигнальные электроды, первый 4 и второй 5 подтягивающие резисторы, источник 6 постоянного напряжения, блок 7 сравнения сигналов, коммутатор 8.
Общий 1 электрод подключен на «землю». Первый 4 и второй 5 подтягивающие резисторы включены соответственно между выходом первого 2 и второго 3 сигнальных электродов и источником 6 постоянного напряжения. Входы блока 7 сравнения сигналов соединены с выходами подтягивающих резисторов 4 и 5, а выход - с соответствующим входом коммутатора 8 на выходах которого формируются электрические сигналы для выдачи в блок электроники гидроакустического средства и систему программного управления и контроля АНПА (на фиг. 1 не показаны).
Общий 1 и первый 2 сигнальный электроды (фиг. 2) установлены ниже антенны 9 гидроакустического средства так, чтобы при наименьшей осадке АНПА 10 и при качке электроды не выходили из воды. Второй сигнальный электрод 3 установлен выше антенны 9 гидроакустического средства.
Электроды выполнены из токопроводящего стойкого к воздействию морской воды материала, например, латуни. Номинал подтягивающих резисторов составляет 10 МОм. В качестве источника постоянного напряжения можно использовать внешний источник электропитания напряжением 5 В, например, вторичный источник электропитания блока электроники гидроакустического средства или систему энергообеспечения АНПА. Блок сравнения сигналов построен на базе микросхемы 564 ЛА7 В бК0.347.064ТУ1/02, а в качестве коммутатора используется микроконтроллер PIC12C5XX компании «Microchip Technology Incorporated)).
Заявляемое устройство работает следующим образом.
При движении АНПА по водной поверхности общий 1 и первый 2 сигнальный электроды постоянно находятся в воде, при этом с выхода первого подтягивающего резистора 4 на опорный вход блока 7 сравнения сигналов подается сигнал, уровень которого зависит от электропроводности воды в районе плавания. На управляющий вход блока 7 сравнения сигналов поступает сигнал с выхода второго подтягивающего резистора 5. В блоке 7 сравнения сигналов осуществляется сравнение уровней опорного и управляющего входных сигналов. С выхода блока 7 сравнения сигналов формируется сигнал определяющий режим работы коммутатора 8. Когда уровни входных сигналов блока 7 сравнения сигналов равны, т.е. когда электроды 2 и 3 находятся в одинаковой по электропроводности среде, коммутатор 8 генерирует сигналы низкого уровня; если уровень на управляющем входе отличается от уровня на опорном - выходы коммутатора 8 имеют высокий уровень. Поскольку значение электропроводности контакта с брызгами, конденсированными или выпадающими осадками отличается от значения электропроводности контакта с морской или пресной водой, то в блок электроники гидроакустического средства и систему программного управления и контроля АНПА поступают сигналы низкого уровня только в случае полного погружения антенны гидроакустического средства в воду. Сигнал низкого уровня разрешает работу гидроакустического средства на излучение. Если уровни входных сигналов блока 7 сравнения сигналов отличаются, коммутатор 8 генерирует сигналы высокого уровня, один из которых запрещает работу гидроакустического средства на излучение, а второй информирует об этом систему программного управления и контроля АНПА.
Таким образом, заявляемое устройство позволяет автоматически определять положение антенны гидроакустического средства АНПА относительно водной поверхности. Введение в устройство второго сигнального электрода, второго подтягивающего резистора и блока сравнения сигналов позволяет снизить влияние на надежность работы таких факторов, как наличие брызг, конденсированных или выпадающих осадков. Технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Малоразмерный ультразвуковой измеритель расстояния | 2019 |
|
RU2720640C1 |
| Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала | 2023 |
|
RU2809350C1 |
| Многолучевой эхолот автономного необитаемого подводного аппарата | 2021 |
|
RU2759497C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| Способ управления подводным робототехническим комплексом по каналу связи | 2017 |
|
RU2656825C1 |
| МОБИЛЬНАЯ СИСТЕМА КОМПЛЕКСНОГО МОНИТОРИНГА АКВАТОРИЙ И СПОСОБ МОНИТОРИНГА АКВАТОРИЙ | 2014 |
|
RU2569938C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
Заявляемое изобретение относится к области гидроакустической техники и предназначено для непрерывного автоматического контроля положения антенны гидроакустического средства АНПА относительно водной поверхности. Технический результат заключается в снижении числа ложных срабатываний при движении АНПА по водной поверхности из-за таких факторов, как наличие брызг, конденсированных или выпадающих осадков. Введение второго сигнального электрода, второго подтягивающего резистора и блока сравнения сигналов позволили решить задачу надежного автоматического определения положения антенны гидроакустического средства АНПА относительно водной поверхности. 2 ил.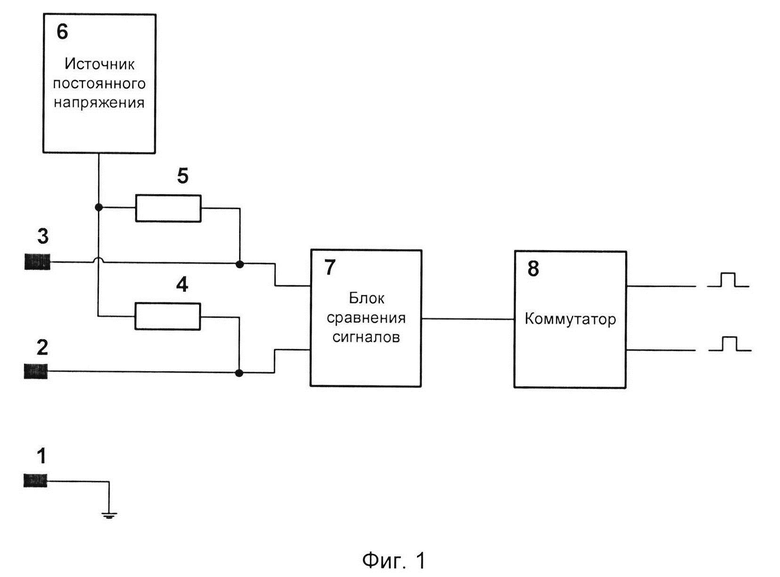
Датчик погружения антенны гидроакустического средства, который содержит общий и первый сигнальный электроды, первый подтягивающий резистор, включенный между выходом первого сигнального электрода и источником постоянного напряжения, причем выход общего электрода подключен на «землю», отличающийся тем, что в него введены второй сигнальный электрод и второй подтягивающий резистор, включенный между выходом второго сигнального электрода и источником постоянного напряжения, и блок сравнения сигналов, входы которого соединены с выходами первого и второго подтягивающих резисторов, а выход подключен к соответствующему входу коммутатора, выходы которого связаны с блоком электроники гидроакустического средства и системой программного управления и контроля АНПА, при этом общий и первый сигнальный электроды установлены ниже, а второй сигнальный электрод - выше антенны гидроакустического средства.
| US 6693847 B2, 17.02.2004 | |||
| US 6122852 A1, 26.09.2000 | |||
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| Автоматическая блокировка для электрических железных дорог | 1952 |
|
SU101275A1 |
| US 4757481 A1, 12.07.1988. | |||

