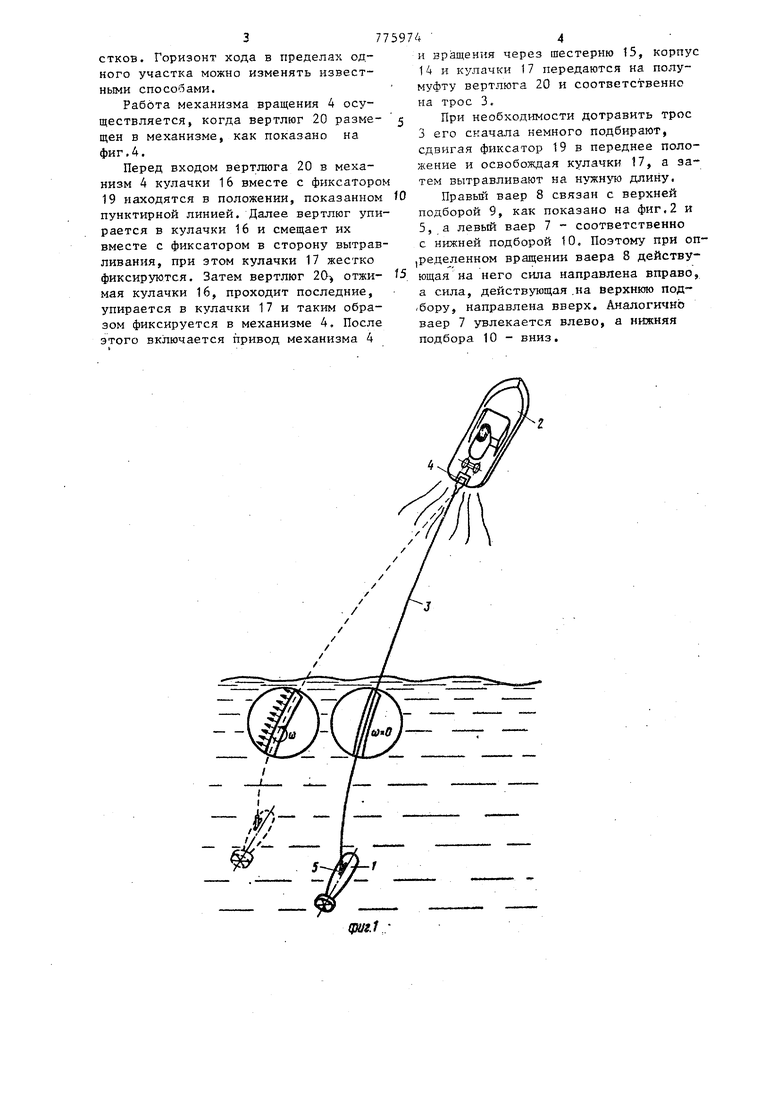
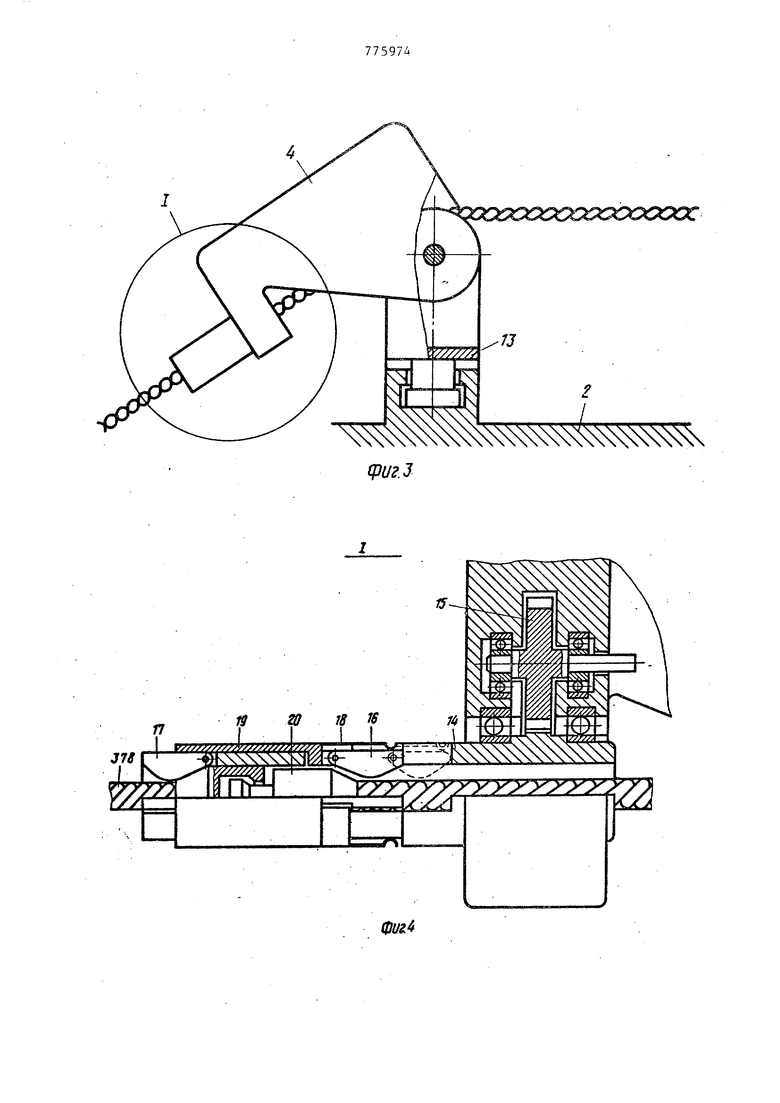
7 Изобретение относится к средствам дистанционного управления, в частности к устройствам для управления буксируемыми подводными объектами. Известно устройство для управления буксируемым подводным объектом, .содержащее буксирный трос, коренной конец которого связан с надводным плавучим средством, а ходовой конец - с буксируемым подводньм объектом. Однако такое устройство малоэффективно при использовании. Цель изобретения - повышение эффективности использования устройства для управления буксируемым подводным объектом. Поставленная цель достигается тем что устройство для управления буксируемым подводным объектом снабжено механизмом вращения буксирного троса смонтированным на надводном плавучем средстве и связанным с коренным концом буксирного троса, и вертлюгом, .посредством которого ходовой конец буксирного троса соединен с буксируемым подводным объектом,а буксирный тр выполнен из отдельных связанных между собой элементов разного диаметра. Механизм вращения буксирного троса содержит цилиндрический корпус, выполненный с возможностью вращения вокруг своей оси и включающий две группы кулачков, причем кулачки одной группы выполнены подпружиненными, кулачки другой группы содержат втулочный фиксатор, а элементы буксирного троса связаны между собой посредством вертлюгов, выполненных сопрягаемыми с кулачками. На фиг,1 изображена схема буксировки подводного аппарата, нафиг.2 схема буксировки трала, на фиг,3 механизм вращения буксирного тросаJ на фиг.4 - узел I на фиг,3, разрезу на фиг,5 - узел II на фиг.2, разрез, на фиг,6 - узел III на фиг,2, разрез Устройство для управления буксируемым подводным объектом 1, например подводным аппаратом, смонтировано на надводном плавучем средстве 2, например судне, и содержит буксирный трос 3, механизм вращения 4, смонтированньй на судне 2, вертлюг 5, посредством которого трос 3 связан с объектом 1. Пунктирной линией на фиг,1 показано положение подводного объекта 1 при вращении буксирного троса 3. 4 Для буксировки рыболовного трала 6 функцию буксирного троса выполняют ваеры 7 и 8, связанные с верхней 9 и нижней 10 подборами, Ваеры 7 и 8 могут иметь утолщенные участки 11 и 12, которые целесообразно расположить ближе к крыльям трала 6, Механизм вращения 4 шарнирно смонтирован на корме судна 2 на поворотной опоре 13 и содержит цилиндрический корпус 14, связанный посредством шестерни 15 с приводом (на чертеже не показан), В корпусе 14 .всоответствующих вырезах шарнирно смонтированы две группы кулачков 16 и 17. Кулачки 16 поджаты пружинами 18, а кулачки 17 снабжены втулочньгм фиксатором 19, который связан с кулачками возможность поступателького перемещения относительно корпуса 14. Буксирный трос 3, ваерь 7 и 8, а также подборы 9 и 10 состоят из участков. Участки троса 3 и ваеров 7, 8 соединены между собой вертлюга.ми 20, а участки подбор 9 и 10 - валиками 21, которые смонтированы в подшипниковых муфтах 22, закрегшенкых на посадочных тросах 23, Ваеры 7 и 8 соединены с подборами 9 и 10 посредством тройников 24, при этом ваер 7 связан с нижней подборой 10, а ваер 8 - с верхней подборой 9 посредством карданных шарниров 25. Устройство работает следующим образом. Принцип действия управляющих сил, воздействующих на буксируемый подводный объект, основан на использовании эффекта Магнуса, сущность которого заключается в возникновении боковой силы, действующей на вращающийся вокруг своей оси цилиндр, помещенньы в поток. При вращении буксирного троса 3 вокруг своей оси в процессе буксировки подводного объекта 1 возникает блоковая сила, направление которой зависит от направления вращения троса 3 и направления буксировки объ, 1 величина - от скорости вращ, диаметра троса 3, Участки троса 3 или ваеров 7 и 8 имеют определенную длину, поэтому их вытравленная длина и соответственно горизонт хода подводного аппарата 1 или трала 6 изменяется дискретно в зависимости от длины упомянутых участков. Горизонт хода в пределах одного участка можно изменять известньми способами.
Работа механизма вращения 4 осуществляется, когда вертлюг 20 размещен в механизме, как показано на фиг,4.
Перед входом вертлюга 20 в механизм 4 кулачки 16 вместе с фиксатором 19 находятся в положении, показанном пунктирной линией. Далее вертлюг упирается в кулачки 16 и смещает их вместе с фиксатором в сторону вытравливания, при этом кулачки 17 жестко фиксируются. Затем вертлюг 20 отжимая кулачки 16, проходит последние, упирается в кулачки 17 и таким образом фиксируется в механизме 4. После этого включается привод механизма 4
и вращения через шестерню 15, корпус 14 и кулачки 17 передаются на полумуфту вертлюга 20 и соответственно на трос 3.
При необходимости дотравить трос 3 его сначала немного подбирают, сдвигая фиксатор 19 в переднее положение и освобождая кулачки 17, а затем вытравливают на длину.
Правый ваер 8 связан с верхней подборой 9, как показано на фиг,2 и 5, а левый ваер 7 - соответственно с нижней подборой 10. Поэтому при оп,ределенном вращении ваера 8 действующая на него сила направлена вправо, а сила, действующая .на верхнюю под/бору, направлена вверх. Аналогично ваер 7 увлекается влево, а нижняя подбора 10 - вниз.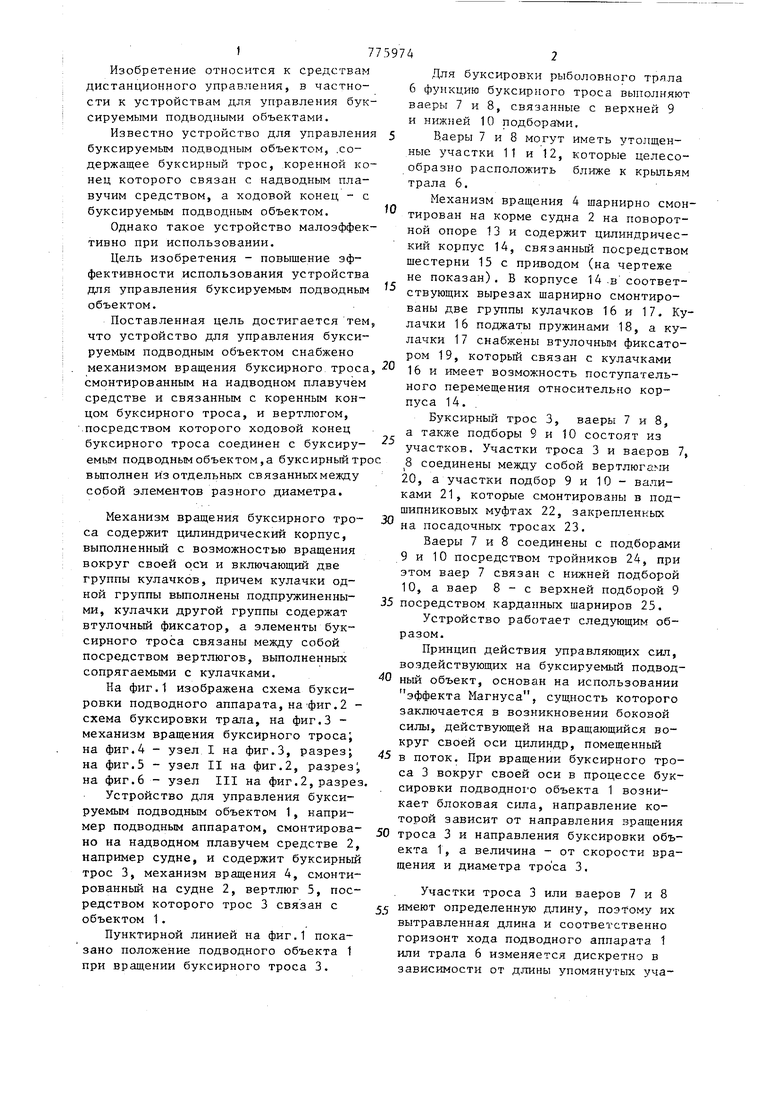
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения местонахождения под водой буксируемых объектов | 1980 |
|
SU891500A1 |
| Устройство для буксировки подводных объектов | 1981 |
|
SU962092A1 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| ПОДВОДНАЯ БУКСИРУЕМАЯ ПОИСКОВАЯ СИСТЕМА | 2009 |
|
RU2410280C1 |
| СПОСОБ БУКСИРОВКИ ПОДВОДНОЙ ЛОДКИ | 2015 |
|
RU2619885C2 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| Буксирное устройство | 1978 |
|
SU707844A1 |
| Устройство для буксировки плавучих объектов | 1981 |
|
SU1028557A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ДИНАМИЧЕСКИХ НАГРУЗОК В БУКСИРНОЙ ЛИНИИ | 2018 |
|
RU2707479C2 |
| СПОСОБ ПОСТАНОВКИ МИН | 2014 |
|
RU2562007C1 |

1.УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БУКСИРУЕМЫМ ПОДВОДНЫМ ОБЪЕКТОМ, содержащее буксирный трос, коренной конец которого связан с надводным плавучим средством, а ходовой конец - с буксируемым подводным объектом, о тличающееся тем, что, с целью повышения эффективности использования, оно снабжено механизмом вращения буксирного троса, смонтированным на надводном плавучем средстве и связангным с коренным концом буксирного троса, и вертлюгом, посредством которого ходовой конец буксирного троса соединен с буксируемым подводным объектом, а буксирный трос выполнен из otдельных связанных между собой элементов разного диаметра. 2. Устройство по П.1, отличающееся тем, что механизм вращения буксирного троса содержит цилиндрический корпус, выполненный с возможностью вращения вокруг своей оси и включающий две группы кулачков, причем кулачки одной группы выполнены подпружиненными, кулачки другой группы содержат втулочный фиксатор, а элементы буксирного троса связаны между собой посредствомвертлюгов, выполненных сопрягаемыми с кулачками. СП О чЗ ф
-- I. ,
| Устройство для регулирования глубины погружения буксируемых в воде объектов | 1972 |
|
SU458961A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
