Предлагаемое изобретение относится к архитектуре и машиностроению и может быть использовано при разработке и проектировании автоматизированных быстровозводимых конструкций.
Известен складной контейнер [С. Hoberman. Collapsible containers. US Patent App.11/483,329, 2007]. Устройство включает в свой состав стойку и платформу, соединенные между собой материалом, который за счет складок обеспечивает сложение контейнера из пространственной конфигурации в плоскую. Недостатком данного устройства является наличие множества складок, изготовление которых требует повышенной точности. Кроме этого, во всех положениях, за исключением полностью раскрытого, внутренний объем контейнера сокращается за счет того, что смещение материала, расположенного между стойкой и платформой, происходит не строго в вертикальном направлении, а также во внутренней части контейнера.
Наиболее близким к предлагаемому устройству является складной механизм Саррюса [G. Chen, S. Zhang, G. Li. Multistable behaviors of compliant Sarrus mechanisms. Journal of Mechanisms and Robotics, 2013, Vol.5, 021005-1, Fig. 1], принимаемый в качестве прототипа. Механизм включает в свой состав стойку и платформу, между которыми расположены двухзвенные кинематические цепи, состоящие из рычагов и шатунов. Недостатком прототипа является относительно небольшая жесткость в вертикальном габарите в связи с тем, что каждая кинематическая цепь включает всего пару звеньев. Кроме этого кинематические цепи во всех положениях, за исключением крайнего вертикального, располагаются за периметром платформы, что увеличивает габариты механизма, особенно в сложенной конфигурации.
Задача, решаемая при использовании предлагаемого технического решения, заключается в повышении жесткости конструкции в вертикальном габарите, а также в расположении кинематических цепей таким образом, чтобы они не выходили за периметр платформы в любом положении конструкции.
Данная задача решается тем, что в предлагаемой складной инженерной конструкции, включающей стойку и платформу, между которыми установлены кинематические цепи, в состав которых входят рычаги и шатуны, согласно изобретению, каждая кинематическая цепь снабжена винтом, выполненным с правой и левой резьбой равного шага и сопряженным со стойкой посредством вращательных шарниров, и двумя ползунами, сопряженными со стойкой посредством поступательных шарниров, а с винтом посредством винтовых шарниров, при этом между рычагами и стойкой при помощи вращательных шарниров установлены малые коромысла, а между шатунами и стойкой также при помощи вращательных шарниров установлены большие коромысла, причем между рычагами и шатунами посредством вращательных шарниров установлены стержни, при этом оси шарниров между винтом и стойкой, а также ползунами и стойкой и ползунами и винтом являются ортогональными осям остальных шарниров.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении конструкции большей жесткости в вертикальном габарите, а также в расположении кинематических цепей внутри периметра платформы при любом положении конструкции.
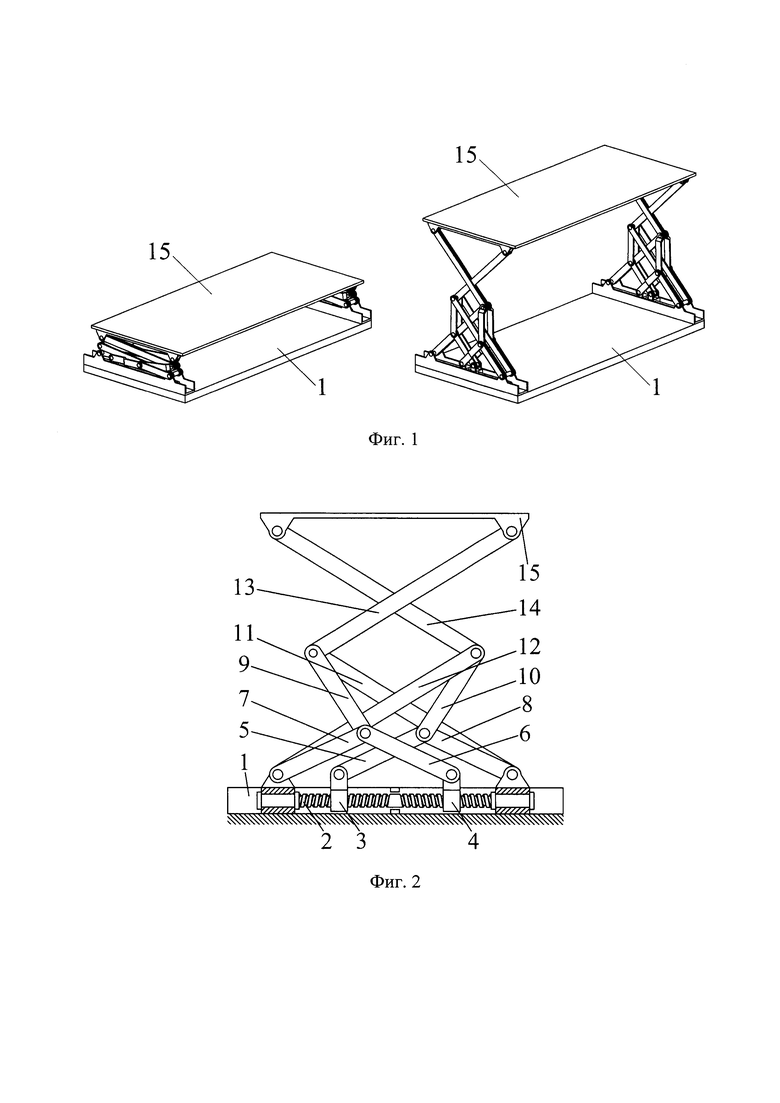
На фиг. 1 показана предлагаемая складная инженерная конструкция в сложенной и разложенной конфигурациях. На фиг. 2 показана одна из кинематических цепей конструкции, установленная между стойкой и платформой. На фиг. 3 и 4 показан пример использования предлагаемой складной инженерной конструкции в качестве быстровозводимого сооружения в сложенной и разложенной конфигурациях.
Конструкция включает в свой состав стойку 1 и платформу 15, между которыми установлены кинематические цепи. Каждая из таких цепей состоит из винта 2 (ведущее звено), ползунов 3 и 4, рычагов 5 и 6, малых коромысел 7 и 8, стержней 9 и 10, больших коромысел 11 и 12, шатунов 13 и 14. При этом винт 2 выполнен с правой и левой резьбой равного шага.
Звенья 1 и 2; 3 и 5; 4 и 6; 1 и 7 и 12; 1 и 8 и 11; 6 и 7 и 9; 5 и 8 и 10; 9 и 11 и 13; 10 и 12 и 14; 13 и 15; 14 и 15 образуют вращательные шарниры. Звенья 1 и 3; 1 и 4 образуют поступательные шарниры. Звенья 2 и 3; 2 и 4 образуют винтовые шарниры. При этом геометрические оси шарниров 1-2, 1-3, 1-4, 2-3 и 2-4 ортогональны осям остальных вращательных шарниров.
Принцип работы предлагаемой конструкции заключается в следующем. При повороте винта 2 относительно стойки 1 в каждой кинематической цепи движение передается ползунам 3 и 4, которые приводят в движение рычаги 5 и 6. От них приводятся в движение малые коромысла 7 и 8, а также стержни 9 и 10. Далее в движение приводятся большие коромысла 11 и 12, а также шатуны 13 и 14, которые смещают платформу 15 вертикально вверх или вниз. При этом винты 2 приводятся в движение одновременно в каждой кинематической цепи. Направление смещения платформы определяется направлением поворота винтов 2. Предлагаемая разработка может быть использована в качестве быстровозводимого сооружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| СКЛАДНОЙ МЕХАНИЗМ | 2018 |
|
RU2681978C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
| ОРИГАМИ МЕХАНИЗМ | 2018 |
|
RU2694704C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ТРЕХКООРДИНАТНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2809101C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |

Изобретение относится к архитектуре и машиностроению и может быть использовано при разработке и проектировании автоматизированных быстровозводимых конструкций. Складная инженерная конструкция включает стойку и платформу, между которыми установлены кинематические цепи, в состав которых входят рычаги и шатуны. Каждая кинематическая цепь снабжена винтом, выполненным с правой и левой резьбой равного шага и сопряженным со стойкой посредством вращательных шарниров, и двумя ползунами, сопряженными со стойкой посредством поступательных шарниров, а с винтом посредством винтовых шарниров. Между рычагами и стойкой при помощи вращательных шарниров установлены малые коромысла, а между шатунами и стойкой также при помощи вращательных шарниров установлены большие коромысла, при этом между рычагами и шатунами посредством вращательных шарниров установлены стержни. Оси шарниров между винтом и стойкой, а также ползунами и стойкой и ползунами и винтом являются ортогональными осям остальных шарниров. Обеспечивается реализация новых функциональных свойств устройства. 4 ил.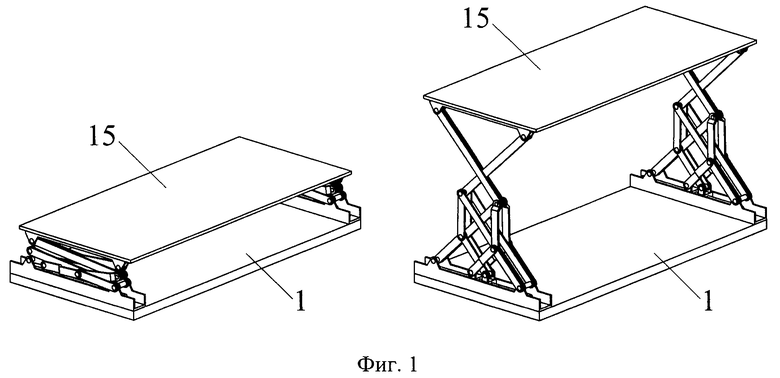
Складная инженерная конструкция, включающая стойку и платформу, между которыми установлены кинематические цепи, в состав которых входят рычаги и шатуны, отличающаяся тем, что каждая кинематическая цепь снабжена винтом, выполненным с правой и левой резьбой равного шага и сопряженным со стойкой посредством вращательных шарниров, и двумя ползунами, сопряженными со стойкой посредством поступательных шарниров, а с винтом посредством винтовых шарниров, при этом между рычагами и стойкой при помощи вращательных шарниров установлены малые коромысла, а между шатунами и стойкой также при помощи вращательных шарниров установлены большие коромысла, причем между рычагами и шатунами посредством вращательных шарниров установлены стержни, при этом оси шарниров между винтом и стойкой, а также ползунами и стойкой и ползунами и винтом являются ортогональными осям остальных шарниров.
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| СКЛАДНОЙ МЕХАНИЗМ С ИНТЕГРИРОВАННЫМИ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ | 2019 |
|
RU2729835C1 |
| DE 19840886 С2, 13.03.2003 | |||
| US 2022178670 A1, 09.06.2022 | |||
| Способ получения карбюризатора | 1940 |
|
SU70489A1 |

