Изобретения относятся к точному приборостроению, а именно к гироскопической технике, и может быть использованы в индикаторных гиростабилизаторах.
Техническим результатом изобретений является повышение устойчивости системы за счет получение сигнала обратной связи по скорости каналов стабилизации гиростабилизатора.
Индикаторная гироскопическая платформа, содержащая электромеханическую часть, состоящую из гироскопа, дифференциальных датчиков угла первого и второго канала гироскопа, датчика момента первого и второго канала гироскопа, датчиков угла платформы, двигателей стабилизации платформы и электронную часть, состоящую из первого и второго усилителей управления платформой, первого и второго усилителей стабилизации платформы, тахометрический мост с дифференциальным усилителем первого канала стабилизации, тахометрический мост с дифференциальным усилителем второго канала стабилизации.
Способ получения сигнала обратной связи по скорости каналов стабилизации платформы заключается в выделении тахометрическим мостом сигнала, пропорционального ЭДС, а значит и скорости вращении двигателя, и подачи его в канал стабилизации платформы через дифференциальный усилителе с необходимым коэффициентом усиления.
Изобретения относятся к точному приборостроению, а именно к гироскопической техники, и может быть использовано в индикаторных гиростабилизаторах.
Известен способ получения сигнала об угловой скорости вращения двигателя при помощи тахометрического моста [1].
Недостатком данного способа является низкая помехозащищенность схемы.
Известна гироскопическая индикаторная платформа, в которой устойчивость системы стабилизации обеспечивается введением пропорциональной коррекции [2].
Недостатком обеспечения устойчивости данной платформы является возможность неустойчивой работы при больших сигналах гироскопа в момент включения, что приводит к необходимости введения электрического арретирования гироскопа перед включением режима стабилизации.
Наиболее близким к заявленному способу является способ получения сигнала обратной связи по скорости при помощи сравнивания сигналов, снимаемых с датчика тока, подключенного последовательно с исполнительным двигателем и входным сигналом усилителя мощности [3].
Недостатком данного способа является необходимость подбора коэффициента для сигнала с датчика тока, что приводит к необходимости установки второго операционного усилителя.
Наиболее близким к заявленному устройству является гироскопическая индикаторная платформа [2], содержащая гироскоп, датчики угла и датчики момента гироскопа, двигатели стабилизации платформы, тахогенераторы, соединенные с осями вращения платформы через редуктор.
Недостатком данного устройства является дополнительный нагрузочный момент на валу исполнительного двигателя, отрицательные свойства коллектора тахогенератора и.т.п.
Задачей, на решение которой направлены настоящие изобретения, является получение сигнала об угловой скорости платформы, преобразование и подача его на сумматор усилителя мощности для повышения устойчивости платформы.
Поставленная задача достигается тем, что в способе получения обратной связи по угловой скорости платформы сигнал с тахометрического моста в определенной фазе подается на дифференциальный усилитель, с которого полезный с необходимым коэффициентом усиления подается на сумматор усилителя мощности.
В индикаторную гироскопическую платформу, в состав которой входят гироскоп и два канала, содержащие дифференциальные датчики угла, соединенные через усилители стабилизации с соответствующими двигателями стабилизации платформы, датчик момента в каждом канале, входы управления платформы, датчики угла платформы, согласно изобретению, на выходе усилителя стабилизации дополнительно введен по каждому каналу тахометрический мост, одно плечо которого организовано на двух резисторах, а другое плечо - из обмотки двигателя стабилизации и дополнительного резистора. Сигнал с тахометрического моста через дифференциальный усилитель после преобразования по амплитуде с определенной фазой подается на сумматор усилителя мощности усилителя стабилизации.
К существенным отличиям предложенного способа получения сигнала обратной связи по скорости является отсутствие необходимости применения тахогенератора, а повышение устойчивости системы стабилизации обеспечивается получением сигнала с тахометрического моста, пропорционального скорости вращения платформы и подбором необходимого коэффициента усиления обратной связи по скорости.
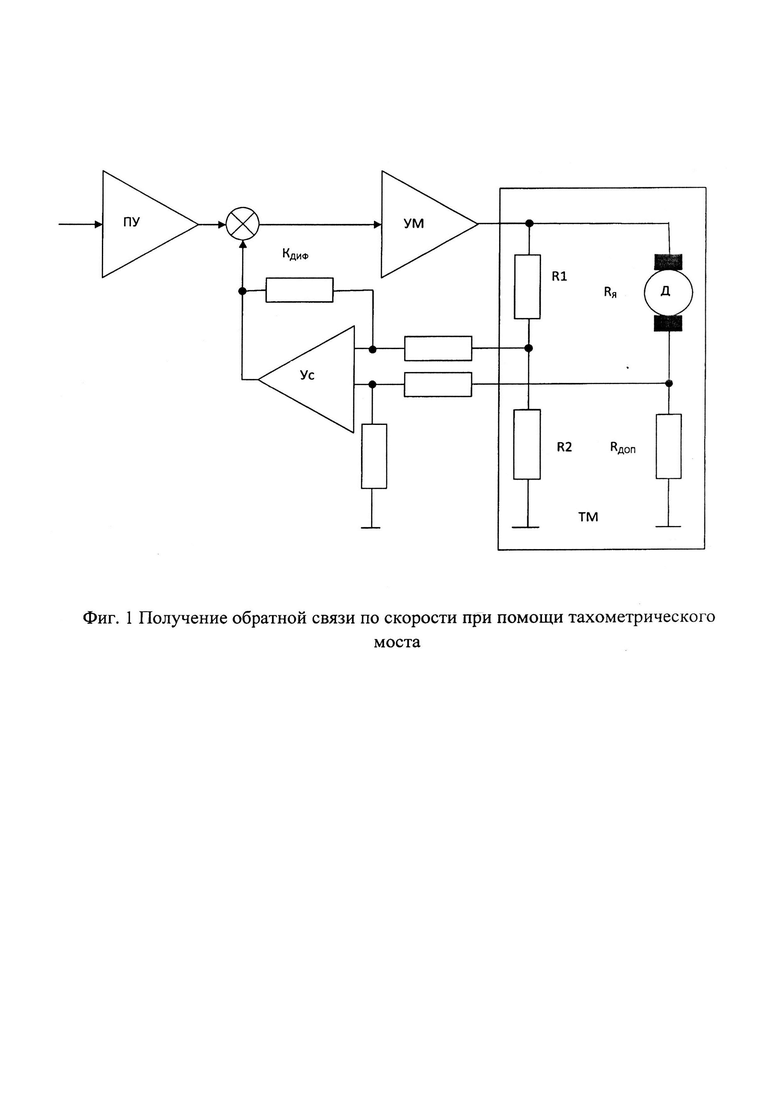
Предлагаемое изобретение иллюстрируется чертежом, где представлены предварительный усилитель 1, сумматор 2, усилитель мощности 3, дифференциальный усилитель 4 и тахометрический мост (ТМ), одно плечо которого организовано на резисторах R1 и R2, а второе из обмотки RЯ двигателя Д и дополнительного резистора RДОП.
Резисторами R3-R6 подбирается необходимый коэффициент дифференциального усилителя Ус.
Процессы в схеме представленной на рис. 1 в установившемся режиме с постоянной скоростью ω могут быть описаны следующими уравнениями:
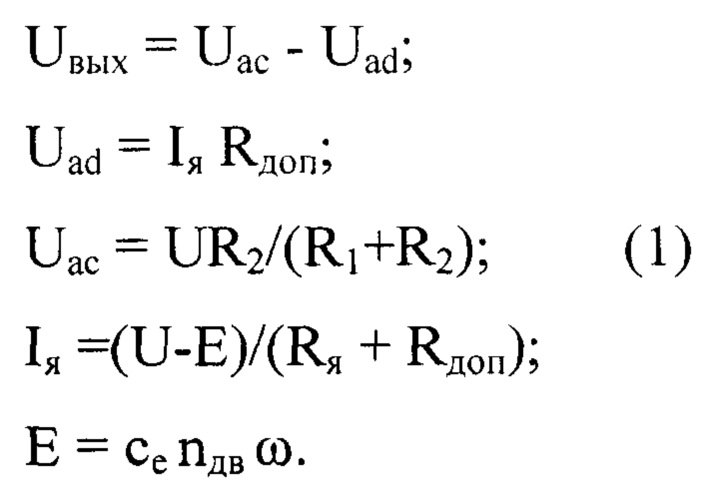
где се - постоянный (конструктивный) параметр - коэффициент противо - э.д.с. электродвигателя;
Решая совместно уравнения (1) относительно Uвыx при условии баланса тахометрического моста, т.е.

получим:

т.е. имеем сигнал, пропорциональный скорости поворота платформы.
Здесь: се - постоянный (конструктивный) параметр - коэффициент противо - э.д.с. двигателя;
nДВ - передаточное число редуктора двигателя стабилизации;
Ω - скорость эволюции объекта,
kTM - коэффициент передачи тахометрического моста.
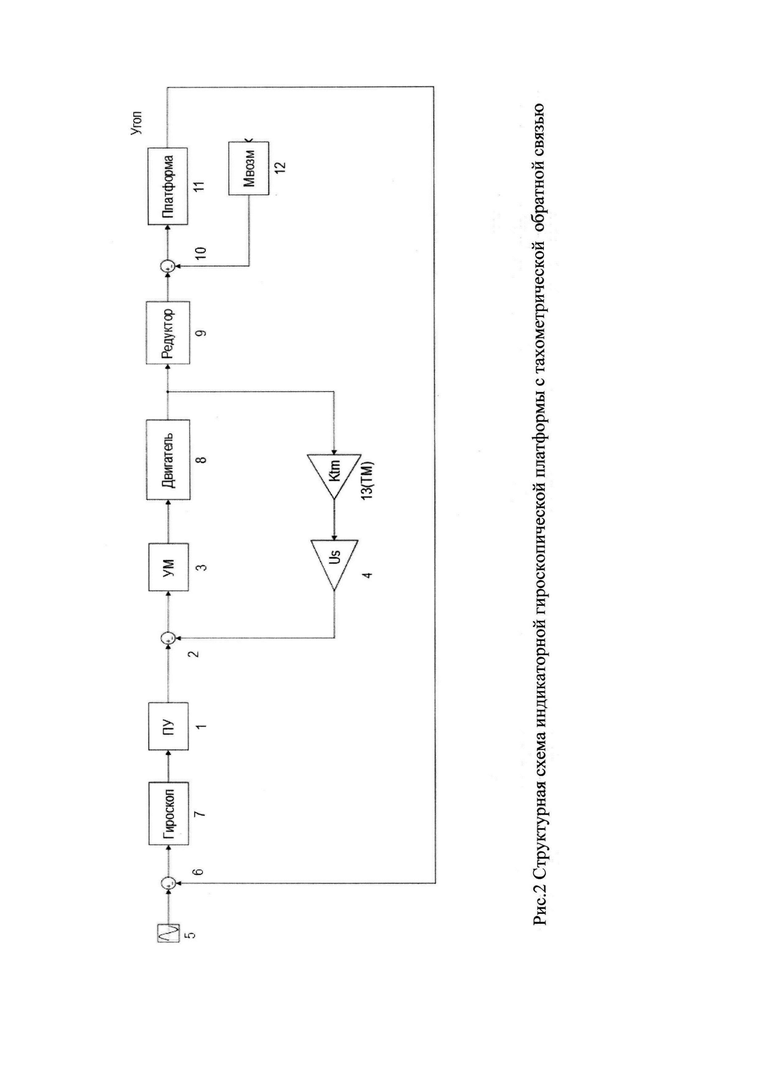
Структурная схема индикаторной гироскопической платформы с применением тахометрического моста представлена на рис. 2,
где: 5 - задающий генератор;
6 - сумматор главной отрицательной обратной связи по углу;
7 - гироскоп;
1 - предварительный усилитель усилителя стабилизации;
2 - сумматор отрицательной обратной связи по скорости;
3 - усилитель мощности;
8 - двигатель стабилизации;
9 - редуктор двигателя стабилизации;
10 - сумматор момента двигателя стабилизации и возмущающего момента;
11 - стабилизируемая платформа;
12 - возмущающий момент;
4 и 13 - блоки, реализующие обратную связь по скорости при применении тахометрического моста;
где 4 - дифференциальный усилитель;
13 - тахометрический мост.
Проведенное моделирование в программе MatLab и практические работы показали, что подбирая коэффициент дифференциального усилителя, можно добиться параметров индикаторной гироскопической платформы не хуже чем с применением тахогенератора.
Источники информации
1. Коновалов Л.И., Элементы и системы автоматики, 1985 г., стр. 43-44.
2. В.А. Бессекерский, Е.А. Фабрикант. Динамический синтез систем гироскопической стабилизации. Л., Судостроение, 1968 г., стр. 55, 105, 106, 123, 172, рис. 6.1.
3. Электронная техника в автоматике, вып. 14, изд.» Радио и связь», 1983 г., стр. 238-239.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДИКАТОРНОЙ ГИРОСКОПИЧЕСКОЙ ПЛАТФОРМОЙ И ИНДИКАТОРНАЯ ГИРОСКОПИЧЕСКАЯ ПЛАТФОРМА | 2008 |
|
RU2391630C2 |
| Способ управления индикаторной гироскопической платформой и устройство для его осуществления | 2016 |
|
RU2622235C1 |
| Способ исключения потери работоспособности индикаторной гироскопической платформы при воздействии угловых скоростей носителя и индикаторная гироскопическая платформа | 2022 |
|
RU2803407C1 |
| ГИРОСКОПИЧЕСКАЯ ИНДИКАТОРНАЯ ПЛАТФОРМА | 2008 |
|
RU2366896C1 |
| СПОСОБ ПУСКА ГИРОСКОПА ИНДИКАТОРНОЙ ГИРОСКОПИЧЕСКОЙ ПЛАТФОРМЫ И ГИРОСКОПИЧЕСКАЯ ИНДИКАТОРНАЯ ПЛАТФОРМА | 2006 |
|
RU2315264C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Способ стабилизации гироскопической платформы и устройство для его осуществления | 2015 |
|
RU2614924C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ГИРОСКОПИЧЕСКОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2018 |
|
RU2693561C1 |
Изобретения относятся к точному приборостроению, а именно к гироскопической технике, и может быть использованы в индикаторных гиростабилизаторах. Способ получения сигнала обратной связи по скорости индикаторной гироскопической платформы отличается тем, что сигнал с тахометрического моста, пропорциональный угловой скорости платформы, в определенной фазе подается на дифференциальный усилитель и с необходимым коэффициентом усиления подается на сумматор усилителя мощности. Индикаторная гироскопическая платформа, в состав которой входят гироскоп и два канала, содержащие дифференциальные датчики угла, соединенные через усилители стабилизации с соответствующими двигателями стабилизации платформы, датчик момента в каждом канале, входы управления платформы, датчики угла платформы. При этом на выходе усилителя стабилизации дополнительно введен по каждому каналу тахометрический мост, одно плечо которого организовано на двух резисторах, а другое плечо - из обмотки двигателя стабилизации и дополнительного резистора, сигнал с которого в определенной фазе через дифференциальный усилитель после преобразования по амплитуде подается на сумматор входа усилителя мощности усилителя стабилизации платформы. Техническим результатом изобретений является повышение устойчивости системы за счет получения сигнала обратной связи по скорости каналов стабилизации гиростабилизатора. 2 н.п. ф-лы, 2 ил.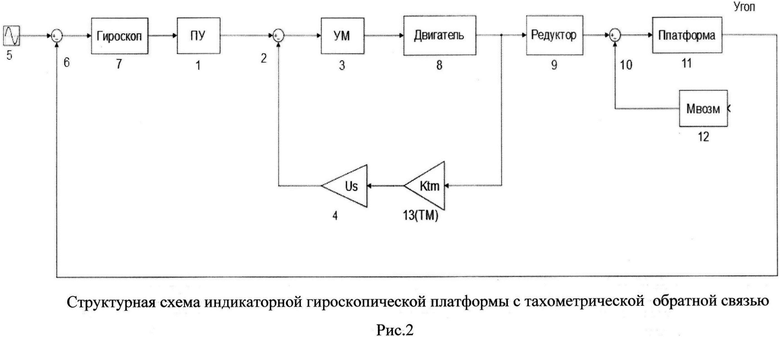
1. Способ получения сигнала обратной связи по скорости индикаторной гироскопической платформы, отличающийся тем, что сигнал с тахометрического моста, пропорциональный угловой скорости платформы, в определенной фазе подается на дифференциальный усилитель и с необходимым коэффициентом усиления подается на сумматор усилителя мощности.
2. Индикаторная гироскопическая платформа, в состав которой входят гироскоп и два канала, содержащие дифференциальные датчики угла, соединенные через усилители стабилизации с соответствующими двигателями стабилизации платформы, датчик момента в каждом канале, входы управления платформы, датчики угла платформы, согласно изобретению, на выходе усилителя стабилизации дополнительно введен по каждому каналу тахометрический мост, одно плечо которого организовано на двух резисторах, а другое плечо - из обмотки двигателя стабилизации и дополнительного резистора, сигнал с которого в определенной фазе через дифференциальный усилитель после преобразования по амплитуде подается на сумматор входа усилителя мощности усилителя стабилизации платформы.
| ГИРОСКОПИЧЕСКАЯ ИНДИКАТОРНАЯ ПЛАТФОРМА | 2008 |
|
RU2366896C1 |
| Способ управления индикаторной гироскопической платформой и устройство для его осуществления | 2016 |
|
RU2622235C1 |
| Тахометрический мост | 1981 |
|
SU1068814A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2057390C1 |
| US 3745436 B, 10.07.1973. | |||

