Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано в гиростабилизаторах.
Известна индикаторная гиростабилизированная платформа [1], содержащая гироскоп, датчики угла, датчики момента.
Недостатком данного устройства является то, что во время пуска чувствительный элемент гироскопа находится в произвольном состоянии в пространстве, а это увеличивает время готовности и приводит к снижению точности в начале разгона.
Наиболее близкой к заявленному устройству является гироскопическая индикаторная платформа [2], содержащая гироскоп и два канала, каждый из которых содержит датчик угла, датчик момента, усилительно-преобразующее устройство, в состав которого входят последовательно соединенные предварительный усилитель, фазочувствительный выпрямитель, усилитель напряжения, усилитель мощности.
Недостатком данного устройства является то, что в случае, если в каждом канале оси датчика угла и датчика момента повернуты относительно друг друга, снижается сила тяжения датчиков момента, а это приводит к снижению точности в начале разгона и увеличению времени готовности.
Задачами, на решение которых направлено настоящее изобретение, является снижение времени готовности и повышение точности работы индикаторной гироскопической платформы с повернутыми относительно друг друга осями датчика угла и датчика момента.
Поставленные задачи достигаются тем, что в гироскопической индикаторной платформе, содержащей гироскоп и два канала, каждый из которых содержит датчик угла, датчик момента, оси которых повернуты относительно друг друга, и усилительно-преобразующее устройство, включенное между датчиками угла и датчиками момента обоих каналов, согласно изобретению между усилительно-преобразующим устройством и датчиком угла первого канала включено суммирующее устройство, а между усилительно-преобразующим устройством и датчиком угла второго канала включено вычитающее устройство, причем датчики угла обоих каналов подключены ко входам суммирующего устройства первого канала и ко входам вычитающего устройства второго канала.
К существенным отличиям устройства относится введение между усилительно-преобразующим устройством и датчиком угла первого канала суммирующего устройства, а между усилительно-преобразующим устройством и датчиком угла второго канала - вычитающего устройства. При повернутых относительно друг друга осях датчика угла и датчика момента, благодаря предложенному включению, осуществляется векторное сложение сил датчиков момента, при этом результирующий вектор силы будет совпадать с осью возмущающей силы, действующей на чувствительный элемент гироскопа. Это обеспечивает наибольшее усилие удержания чувствительного элемента в нулевом положении, что сокращает время готовности и повышает точность работы.
Предлагаемое изобретение иллюстрируется чертежом, где представлена структурная схема устройства.
На чертеже представлены гироскоп 1, датчик 2 угла первого канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 2.1 и 2.2, суммирующее устройство 3 первого канала, усилительно-преобразующее устройство 4, датчик 5 момента первого канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 5.1 и 5.2, средняя точка которых подключена к общему проводу, датчик 6 угла второго канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 6.1 и 6.2, вычитающее устройство 7 второго канала, датчик 8 момента второго канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 8.1 и 8.2, средняя точка которых подключена к общему проводу.
Находящиеся в непосредственной близости от чувствительного элемента гироскопа 1 две соединенные последовательно диаметрально расположенные части 2.1 и 2.2 датчика 2 угла первого канала подключены к одному из входов суммирующего устройства 3 первого канала и вычитающего устройства 7 второго канала. Выход суммирующего устройства 3 первого канала подключен через усилительно-преобразующее устройство 4 к диаметрально расположенным частям 5.1 и 5.2 датчика 5 момента первого канала. Две соединенные последовательно и диаметрально расположенные части 6.1 и 6.2 датчика 6 угла второго канала подключены к другим входам вычитающего устройства 7 второго канала и суммирующего устройства 3 первого канала. Выход вычитающего устройства 7 второго канала через усилительно-преобразующее устройство 4 подключен к диаметрально расположенным частям 8.1 и 8.2 датчика 8 момента второго канала.
Оси датчиков 2, 6 угла и датчиков 5, 8 момента повернуты относительно друг друга из конструктивных соображений. В связи с тем, что датчики 5, 8 момента могут только притягивать чувствительный элемент гироскопа 1, то необходимо эти датчики разделить на две диаметрально расположенные части 5.1, 5.2, 8.1, 8.2. Датчики 2, 6 угла выполнены по дифференциальной схеме и также разделены на две диаметрально расположенные части 2.1, 2.2, 6.1, 6.2, Датчики 2, 6 угла и датчики 5, 8 момента индукционные, содержащие ферромагнитный сердечник и обмотку, а чувствительный элемент гироскопа 1 выполнен из ферромагнитного материала и не обладает намагниченностью.
В связи с тем, что гироскопическая индикаторная платформа двухосная, то необходимо разместить по окружности вблизи чувствительного элемента гироскопа 1 четыре части датчиков 2.1, 2.2, 6.1, 6.2 угла и четыре части датчиков 5.1, 5.2, 8.1, 8.2 момента. Конструктивно они размещены чередующимися, т.е. рядом с частью датчика угла расположена часть датчика момента.
При замкнутой обратной связи между датчиком угла и датчиком момента в каждом канале через усилительно-преобразующее устройство 4 при действии возмущающей силы по одной оси на чувствительный элемент гироскопа 1 в датчике угла по этой оси появляется полезный сигнал, который после обработки в усилительно-преобразующем устройстве 4 вызывает появление напряжения в соответствующей части датчика момента этого канала и происходит притяжение чувствительного элемента гироскопа 1 к этой части датчика момента. Но так как оси датчика угла и датчика момента канала повернуты относительно друг друга на некоторый угол φ, то сила тяжения этой части датчика момента по оси действия возмущающей силы будет в cos φ раз меньше, а следовательно, и сила тяжения, действующая на чувствительный элемент гироскопа 1, будет меньше. Для увеличения силы тяжения датчиков момента необходимо подавать напряжение одновременно на два датчика момента, при этом будет происходить векторное сложение сил тяжения обоих датчиков.
Работа устройства осуществляется следующим образом.
На гиромотор гироскопа 1 подают питание, и он начинает вращаться. В связи с тем, что во время пуска чувствительный элемент гироскопа 1 находится в произвольном состоянии в пространстве, одновременно на выходах обоих датчиков 2 и 6 угла будут иметь место полезные сигналы, которые после сложения суммирующим устройством 3, вычитания вычитающим устройством 7 и преобразования усилительно-преобразующим устройством 4 поступают на соответствующие части датчиков 5 и 8 момента. В связи с тем, что оси датчиков 2 и 6 угла каждого канала повернуты относительно осей датчиков 5 и 8 момента, происходит векторное приведение осей путем сложения сигналов датчиков 2, 6 угла по одной оси датчиков 5, 8 момента и вычитания сигналов датчиков 2, 6 угла по другой оси датчиков 5, 8 момента. Преобразованные усилительно-преобразующим устройством 4 сигналы датчиков 2 и 6 угла поступают на соответствующие части датчиков 5 и 8 момента, которые одновременно отклоняют чувствительный элемент гироскопа 1 к нулевому положению. При этом сила тяжения соответствущих частей датчиков 5, 8 момента получается путем векторного сложения сил каждой из двух частей датчиков 5, 8 момента, которая больше, чем сила тяжения каждой части датчика. Например, при действии возмущающей силы по оси У датчики 2.2 и 6.2 угла выдают полезный сигнал, который после сложения в суммирующем устройстве 3, вычитания в вычитающем устройстве 7 и обработки в усилительно-преобразующем устройстве 4 управляет одновременно датчиками 5.2 и 8.2 момента, силы тяжения которых векторно складываются и результирующая сила тяжения действует на чувствительный элемент 1 гироскопа, парируя тем самым возмущающую силу. Аналогично происходит работа по оси Y в другую сторону и по оси X.
Совершив несколько колебаний чувствительный элемент гироскопа 1 занимает нулевое положение. Это сокращает время готовности и повышает точность работы.
Предложенное изобретение использовано в гиростабилизированной платформе и показало хорошие результаты.
Источники информации
1. Индикаторные гироскопические платформы. Под ред. А.Д.Александрова, М., Машиностроение, 1979 г., стр.7-12.
2. Патент РФ №2117915, МПК7 G01С 19/44, 1996 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДИКАТОРНОЙ ГИРОСКОПИЧЕСКОЙ ПЛАТФОРМОЙ И ИНДИКАТОРНАЯ ГИРОСКОПИЧЕСКАЯ ПЛАТФОРМА | 2008 |
|
RU2391630C2 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Способ управления индикаторной гироскопической платформой и устройство для его осуществления | 2016 |
|
RU2622235C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Устройство для управления двумя параллельно включенными теплообменными аппаратами | 2023 |
|
RU2799614C1 |
Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано в гиростабилизаторах. Гироскопическая индикаторная платформа содержит гироскоп 1, датчик 2 угла первого канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 2.1 и 2.2, суммирующее устройство 3 первого канала, усилительно-преобразующее устройство 4, датчик 5 момента первого канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 5.1 и 5.2, датчик 6 угла второго канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 6.1 и 6.2, вычитающее устройство 7 второго канала, датчик 8 момента второго канала, состоящий из двух последовательно соединенных и диаметрально расположенных частей 8.1 и 8.2. Техническим результатом является снижение времени готовности и повышение точности работы индикаторной гироскопической платформы с повернутыми относительно друг друга осями датчика угла и датчика момента. 1 ил.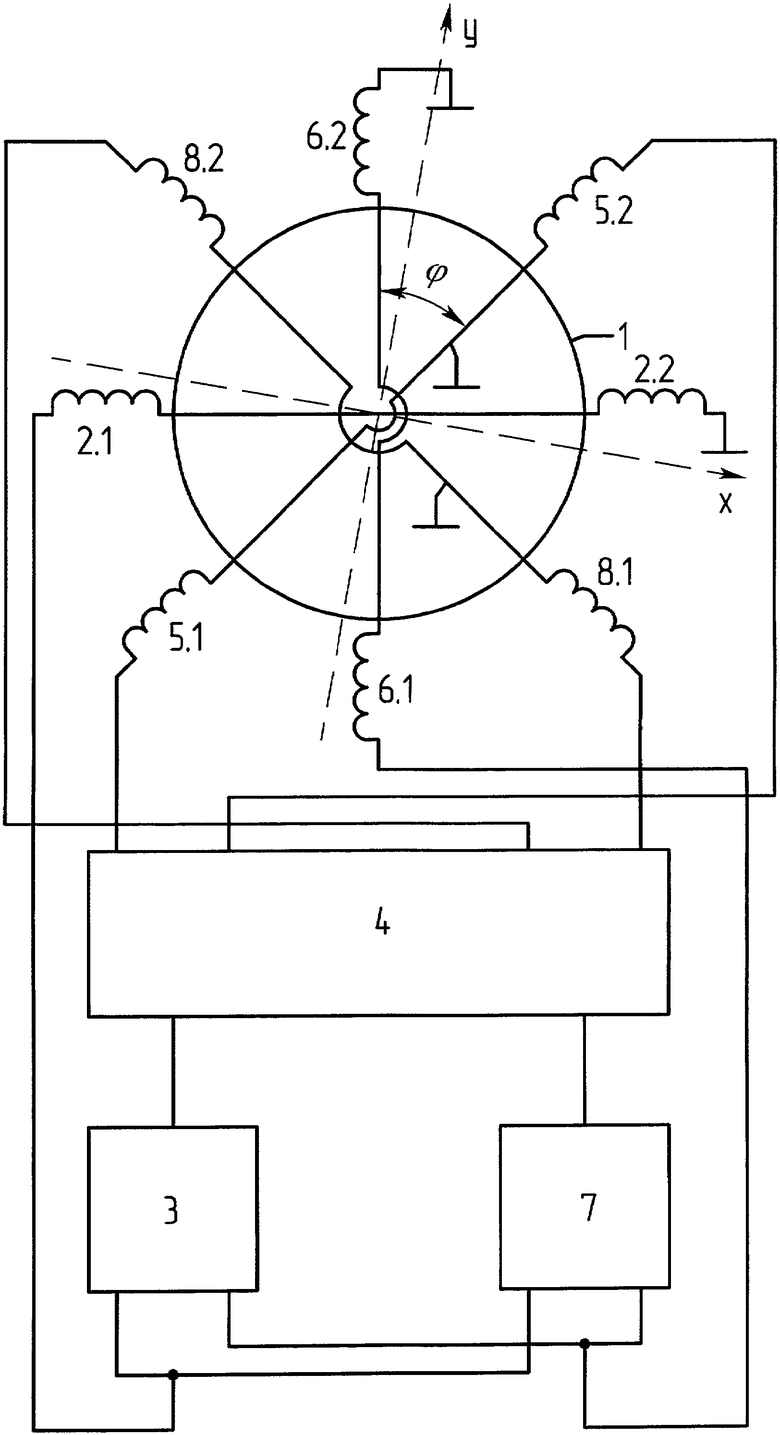
Гироскопическая индикаторная платформа, содержащая гироскоп и два канала, каждый из которых содержит датчик угла, датчик момента, оси которых повернуты относительно друг друга, и усилительно-преобразующее устройство, включенное между датчиками угла и датчиками момента обоих каналов, отличающееся тем, что между усилительно-преобразующим устройством и датчиком угла первого канала включено суммирующее устройство, а между усилительно-преобразующим устройством и датчиком угла второго канала включено вычитающее устройство, причем датчики угла обоих каналов подключены ко входам суммирующего устройства первого канала и ко входам вычитающего устройства второго канала.
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| Индикаторные гироскопические платформы | |||
| / Под ред | |||
| А.Д.Александрова | |||
| - М.: Машиностроение, 1979, с.7-12 | |||
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| US 4512086 А, 23.04.1985. | |||

