Изобретения относятся к точному приборостроению, а именно к гироскопической технике, и могут быть использованы в гироскопических стабилизаторах.
Известен способ [1] стабилизации гироскопической платформы путем компенсации внешнего момента, действующего по оси стабилизации, через стабилизирующий двигатель, управляемый от усилителя стабилизации, который, в свою очередь, управляется от напряжения, снимаемого с датчика угла прецессии гироскопа.
Недостатком данного способа является невозможность определения фактического коэффициента контура стабилизации, что не позволяет обеспечить необходимый запас устойчивости системы и качество стабилизации.
Известно устройство [2], содержащее управляемый трехстепенной гироскоп с датчиком угла и датчиками момента, датчики угла платформы, усилители стабилизации, двигатели стабилизации платформы.
Недостатком данного устройства является отсутствие возможности определения и регулировки коэффициента контура стабилизации, что не позволяет обеспечить необходимый запас устойчивости системы и качество стабилизации.
Наиболее близким к заявленному является способ [2], реализованный в гиростабилизаторе, который заключается в подаче сигнала с датчика угла гироскопа через усилители разгрузки на двигатели разгрузки. Кроме датчиков угла гироскоп имеет по каждой оси моментные датчики.
Недостатком данного способа является невозможность определения фактического коэффициента контура стабилизации, что не позволяет обеспечить необходимый запас устойчивости системы и качество стабилизации.
Наиболее близким к заявленному устройству является индикаторная гироскопическая платформа [3], содержащая гироскоп, датчики угла первого и второго канала гироскопа, первый и второй датчики момента первого канала гироскопа, первый и второй датчики момента второго канала гироскопа, входы управления платформы, датчики угла платформы, двигатели стабилизации платформы, первый и второй усилители стабилизации платформы.
Недостатком данного устройства является отсутствие возможности определения и регулировки коэффициента контура стабилизации, что не позволяет обеспечить необходимый запас устойчивости системы и качество стабилизации.
Технический результат заявленного изобретения заключается в повышении качества стабилизации и обеспечении необходимого запаса устойчивости системы.
Задачей, на решение которой направлены настоящие изобретения, является определение и регулировка коэффициента контура стабилизации гироскопической платформы.
Поставленная задача достигается тем, что в способе стабилизации гироскопической платформы, заключающемся в подаче сигнала с датчика угла прецессии гироскопа через усилитель стабилизации на стабилизирующий двигатель, согласно изобретению, при настройке устойчивости контура стабилизации определяют фактический коэффициент контура стабилизации путем завала ротора гироскопа на известный угол с помощью подачи управляющего сигнала на датчик момента гироскопа при отключенных стабилизирующих двигателях, измеряя при этом напряжение на выходе усилителя стабилизации.
В гироскопическую платформу, в состав которой входят гироскоп с датчиками угла и датчиками момента, входы управления платформы, датчики угла платформы, усилители стабилизации и стабилизирующие двигатели платформы, согласно изобретению, дополнительно введены переключатель включения-отключения стабилизирующих двигателей и регулировочные резисторы, с помощью которых устанавливают необходимое напряжение на выходе усилителя стабилизации.
К существенным отличиям предложенного способа стабилизации гироскопической платформы относится то, что при настройке устойчивости контура стабилизации определяют фактический коэффициент контура стабилизации. Рассматривая гиростабилизатор как систему автоматического регулирования, определение коэффициента контура стабилизации позволит обеспечить необходимый запас устойчивости системы и повысить качество стабилизации.
К существенным отличиям устройства относится введение в него переключателя включения-отключения стабилизирующих двигателей и регулировочных резисторов, позволяющих устанавливать коэффициенты контуров стабилизации согласно расчетным.
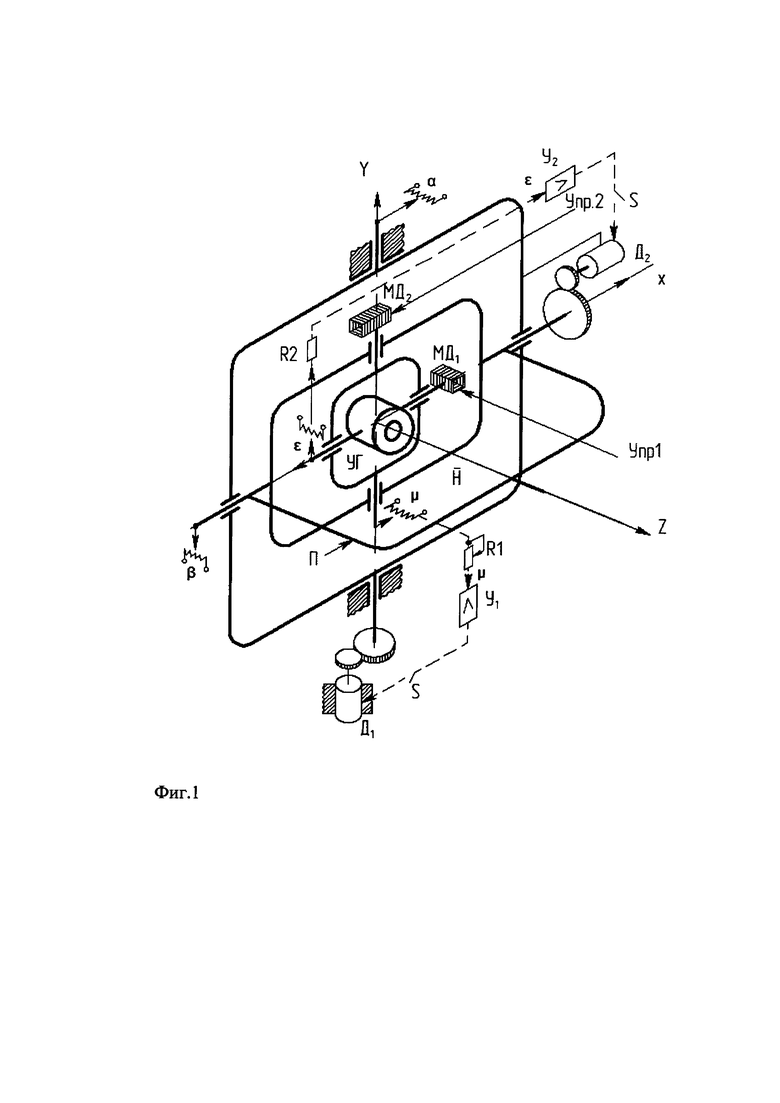
Предлагаемые изобретения представлены на фиг. 1, где представлены управляемый гироскоп УГ, датчики μ, ε угла гироскопа, датчики МД1, МД2 момента гироскопа, усилители У1, У2 стабилизации, регулировочные резисторы R1, R2, стабилизирующие двигатели Д1, Д2, переключатель S включения-отключения стабилизирующих двигателей, платформа П, входы Упр1, Упр2 управления платформой, датчики α, β угла платформы, стабилизируемая ось Z платформы.
Гироскоп устанавливается на гироплатформу таким образом, чтобы вектор кинетического момента  гироскопа был в направлении вдоль стабилизируемой оси Z платформы. Это положение соответствует нулевым сигналам с датчиков μ, ε угла гироскопа. Сигнал с датчиков μ, ε усиливается усилителями У1, У2 и подается на стабилизирующие двигатели Д1, Д2.
гироскопа был в направлении вдоль стабилизируемой оси Z платформы. Это положение соответствует нулевым сигналам с датчиков μ, ε угла гироскопа. Сигнал с датчиков μ, ε усиливается усилителями У1, У2 и подается на стабилизирующие двигатели Д1, Д2.
Способ стабилизации гироскопической платформы осуществляется следующим образом. При отключенных двигателях Д1, Д2 стабилизации (переключатель S разомкнут) через вход Упр2 управления подают управляющий сигнал в датчик МД2 момента гироскопа, в результате чего ротор гироскопа под воздействием момента, создаваемого моментным датчиком МД2, начнет прецессировать вокруг оси X и коснется упора. В момент касания упора измеряют напряжение на выходе усилителя У2 и по формуле (1) определяют фактический коэффициент контура стабилизации по оси X.
где Кст.х - коэффициент контура стабилизации по оси X (В/град);
UУ2 - напряжение на выходе усилителя УР2 (В);
ε - известный угол, на котором находится упор (град).
Для определения коэффициента контура стабилизации по оси y (Кст.у), управляющий сигнал подают через вход Упр1 в датчик МД1 момента, при этом ротор гироскопа начнет прецессировать вокруг оси Y, в момент касания упора измеряют напряжение на выходе усилителя У1 и по формуле (2) определяют фактический коэффициент контура стабилизации по оси Y.
где Кст.у - коэффициент контура стабилизации по оси Y (В/град);
UУР1 - напряжение на выходе усилителя У1 (В);
μ - известный угол, на котором находится упор (град).
Устройство для осуществления способа стабилизации гироскопической платформы кроме переключателя S для включения-отключения стабилизирующих двигателей содержит регулировочные резисторы R1, R2, с помощью которых коэффициенты усиления контуров стабилизации через формулы (1), (2) устанавливаются согласно расчетным.
По окончании регулировки переключатель S замыкают.
Предложенные изобретения использованы в гиростабилизированной платформе и показали хорошие результаты.
Источники информации
1. В.А. Бессекерский, Е.А. Фабрикант. Динамический синтез систем гироскопической стабилизации. Судостроение, Ленинград, 1968 год, стр. 171, 172, 283, 284, рис. 6.1, рис. 9.1.
2. Гироскопические системы. Проектирование гироскопических систем (в двух частях), часть II, Гироскопические стабилизаторы под ред. Проф. Д.С. Пельпора. Москва, «Высшая школа», 1977 год, стр. 103, 104, 105, 115, 116, 133, 134, 135, рис. 3.1, рис. 3.6.
3. Патент РФ №2391630, G01C 19/44.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| Установка для изучения режимов работы динамически настраиваемого гироскопа | 2024 |
|
RU2829671C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
Изобретения относятся к точному приборостроению, а именно к гироскопической технике, и могут быть использованы в гироскопических стабилизаторах. Способ стабилизации гироскопической платформы заключается в подаче сигнала с датчика угла прецессии гироскопа через усилитель стабилизации на стабилизирующий двигатель, при этом при настройке устойчивости контура стабилизации определяют фактический коэффициент контура стабилизации путем завала ротора гироскопа на известный угол с помощью подачи управляющего сигнала на датчик момента гироскопа при отключенном стабилизирующем двигателе, измеряя при этом напряжение на выходе усилителя стабилизации. Технический результат – повышение качества стабилизации и обеспечения необходимого запаса устойчивости системы. 2 н.п. ф-лы, 1 ил.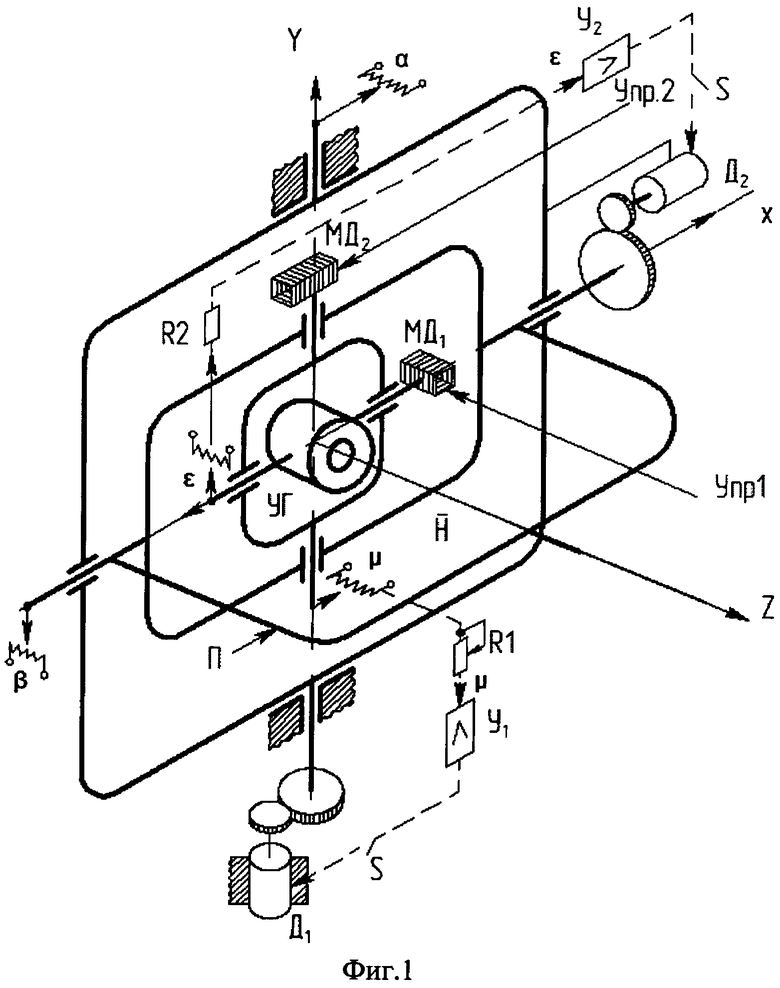
1. Способ стабилизации гироскопической платформы, заключающийся в подаче сигнала с датчика угла прецессии гироскопа через усилитель стабилизации на стабилизирующий двигатель, отличающийся тем, что при настройке устойчивости контура стабилизации определяют фактический коэффициент контура стабилизации путем завала ротора гироскопа на известный угол с помощью подачи управляющего сигнала на датчик момента гироскопа при отключенном стабилизирующем двигателе, измеряя при этом напряжение на выходе усилителя стабилизации.
2. Устройство для стабилизации гироскопической платформы, содержащей гироскоп с датчиками угла и датчиками момента, входы управления платформы, датчики угла платформы, усилители стабилизации и стабилизирующие двигатели платформы, причем датчики угла гироскопа через усилители стабилизации соединены с соответствующими стабилизирующими двигателями платформы, отличающееся тем, что в него дополнительно введены переключатель включения-отключения стабилизирующих двигателей и регулировочные резисторы, установленные в усилителях стабилизации.
| Гироскопические системы | |||
| Проектирование гироскопических систем (в двух частях), часть II, Гироскопические стабилизаторы | |||
| Под ред | |||
| проф | |||
| Д.С | |||
| Пельпора | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| СПОСОБ ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ПЛАТФОРМЫ | 2011 |
|
RU2477834C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| US 6351092 B1, 26.02.2002 | |||
| US 3355954 A, 05.12.1967. | |||

