Настоящее изобретение относится к способу и системе для отслеживания множества сигналов от одного спутника, причем первый и второй сигналы, передаваемые тем же самым спутником, принимают и фильтруют для определения расстояния и скорости изменения расстояния до спутника.
Спутниковые навигационные системы используют ряд спутников в положении на средней околоземной орбите (МЕО), которые обеспечивают информацию автономного гео-пространственного позиционирования. Такие спутники, как правило, находятся на высоте 20000 км, с орбитальным периодом около 12 часов. Электронные приемники, широко известные как ʺsat-navʺ (приемники спутниковой навигации), используют такие спутники, чтобы установить местоположение с точностью до нескольких метров, принимая сигналы времени, передаваемые по линии визирования от спутников к приемнику, для определения долготы, широты и высоты. Сигналы времени также позволяют осуществлять временную синхронизацию с высокой точностью путем вычисления текущего локального времени. Спутниковая навигационная система с глобальным покрытием обычно называется глобальной навигационной спутниковой системой или GNSS. Имеются (по состоянию на 2013 г.) две GNSS, которые представляют собой GNSS глобального действия: NAVSTAR (US GPS или глобальная система позиционирования) и GLONASS (российская система), а также системы в Китае (Beidou) и Европе (Galileo) на разных стадиях развития, как и другие региональные системы.
GNSS приемники используют множество контуров отслеживания сигнала, каждый из которых предназначен для другого типа сигнала и/или спутника. Каждый сигнал, передаваемый спутником, содержит информацию времени (время, в которое передается сигнал) и информацию местоположения (местоположение, при котором передается сигнал). Обычно сигнал принимается с синфазным и квадратурным (со сдвигом 90° или π/2 по фазе) компонентами, затем фильтруется, и данные времени/местоположения используются в качестве основы для определения расстояния до спутника (расстояния между спутником и приемником) и скорости изменения расстояния до спутника (скорости, с которой спутник движется относительно приемника).
Однако сигналы, принятые от того же спутника, когда расстояние между спутником и приемником является одинаковым, будут поступать в различные моменты времени из-за различий в задержке обработки в приемнике. Например, это может быть обусловлено прохождением через фильтры с различной шириной полосы или различными внешними факторами, такими как ионосферная или тропосферная задержки. Ионосферная задержка является частотно-зависимой и испытывает влияние как угла возвышения спутника (над касательной плоскостью локального пользователя), так и общего количества электронов вдоль пути прохождения сигнала между спутником и приемником. Тропосферная задержка содержит компонент, зависимый от прохождения сигнала через сухую атмосферу, и компонент, менее легко определяемый, зависимый от прохождения сигнала через влажную атмосферу. Поэтому предлагались решения, состоящие в том, чтобы удалить компонент ионосферной задержки в обработке сигналов для множества сигналов от одного спутника, например, как в US 7,151,486, которые до некоторой степени успешно работали на основе двух сигналов несущих. Также имеется проблема задержки когерентности в любой оценке ионосферной задержки, которая может быть существенной. Альтернативные решения предусматривают использование третьего сигнала несущей, который позволяет осуществить быстрое разрешение любой неоднозначности фазы несущей, но на практике им свойственны плохие отношения сигнал-шум. Угол, при котором принимается сигнал, будет также частично определять ошибки из-за ионосферной или тропосферной задержки. Угол влияет на расстояние в каждой среде, в которой проходит сигнал до достижения приемника, и, таким образом, вносит свой вклад в величину испытываемой задержки сигнала.
В большинстве ситуаций один приемник будет принимать множество сигналов различных типов в любой момент времени. Для того чтобы иметь возможность формировать одну оценку для местоположения, скорости и времени (PVT) или местоположения, навигации и времени (PNT), обычный приемник должен иметь возможность обрабатывать желательный сигнал одного типа (например, GPS-LI C/A сигнал), принятый от множества спутников. Объединение множества сигналов приводит к увеличению ошибок, так как ошибки из-за ионосферной и тропосферной задержки и отношения шум-сигнал, среди прочего, будут изменяться в зависимости от относительного местоположения (угла и расстояния) приемника и спутника. Таким образом, каждый сигнал, представляющий интерес, будет иметь свои собственные, присущие ему ошибки, которые будут отличаться от любого другого сигнала этого типа, принятого от других спутников. Методы фильтрации используются для уменьшения этих ошибок при объединении множества сигналов одного и того же типа, где математическая функция фильтрации применяется для объединенных данных сигнала и ошибок. Так, например, обычно используются методы фильтрации наименьших квадратов, а также могут быть использованы фильтры Калмана. Отфильтрованные данные приводят в результате к намного более точной оценке сигнала, чем было бы возможно в противном случае. Такие математические методы хорошо подходят для этого типа фильтрации сигнала одного типа от множества источников.
Ни удаление ионосферного компонента, ни использование третьего сигнала несущей не принимают во внимание проблему сред, где GNSS сигнал может отсутствовать, например, из-за подавления помехами. Такие сигналы по-прежнему требуют отслеживания, при условии, что не все GNSS сигналы будут одновременно подавлены. Это, в сочетании с проблемой ухудшения отношения сигнал-шум, которая является фундаментальной проблемой известных методов, приводит к необходимости, иметь возможность отслеживать несколько сигналов от одного спутникового источника, независимо от среды.
Настоящее изобретение направлено на решение этих проблем путем создания способа отслеживания множества сигналов от одного спутника, содержащего: прием первого сигнала, передаваемого спутником; прием по меньшей мере второго сигнала, передаваемого тем же самым спутником; применение процесса предварительной фильтрации, чтобы определить совокупные синфазные и квадратурные компоненты первого и по меньшей мере второго сигналов; и применение процесса фильтрации к совокупным синфазным и квадратурным компонентам первого и по меньшей мере второго сигналов для определения расстояния и скорость изменения расстояния до спутника; причем процесс фильтрации содержит применение фильтра Калмана.
Выход фильтра Калмана содержит оценку расстояния до одного спутника и оценку скорости изменения расстояния. Расстояние и скорость изменения расстояния при получении аналогичным образом от множества спутников (обычно требуется по меньшей мере четыре), могут быть использованы для получения одной оценки для PVT или PNT. Таким образом, описанный выше способ предпочтительно повторяется с использованием множества спутников.
Использование фильтра Калмана для обработки множества сигналов от одного спутника обеспечивает улучшенную навигационную способность, потому что в результате действия фильтра Калмана отношение сигнал-шум оценок расстояния и скорости изменения расстояния до рассматриваемого спутника улучшается. Следствием является то, что сигналы, имеющие более высокое отношение сигнал-шум, могут быть использованы для компенсации сигналов, имеющих более низкое отношение сигнал-шум, принятых от того же спутника. Вопрос подавления сигналов помехами становится менее проблематичным из-за этой способности.
Первый и по меньшей мере второй сигналы могут иметь разные частоты.
Предпочтительно, первый и по меньшей мере второй сигналы имеют одинаковую частоту. В этой ситуации, первый и по меньшей мере второй сигналы могут быть переданы в различные моменты времени.
Предпочтительно способ повторяется с использованием сигналов от множества различных спутников для формирования расстояния и скорости изменения расстояния для каждого спутника, и местоположение объекта вычисляется с использованием оценок расстояния и скорости изменения расстояния от множества спутников. Оценки расстояния и скорости изменения расстояния, полученные от одного спутника, как описано в настоящем документе, улучшаются по точности посредством процесса фильтра Калмана. Таким образом, улучшенное навигационное определение местоположения может быть получено при использовании этих более точных данных. Хотя способ предпочтительно применяют с каждым спутником, используемым, чтобы обеспечить навигационное определение местоположения, он все еще дает преимущество при использовании только с одним или большим поднабором спутников, находящихся в эксплуатации.
В другом аспекте, настоящее изобретение также обеспечивает систему для отслеживания множества сигналов от одного спутника, содержащую: блок приемника, выполненный с возможностью приема первого сигнала, передаваемого спутником, и по меньшей мере второго сигнала, передаваемого тем же самым спутником; и микропроцессор, выполненный с возможностью применения процесса предварительной фильтрации для определения совокупных синфазных и квадратурных компонентов первого и по меньшей мере второго сигналов, и процесс фильтрации к совокупным синфазным и квадратурным компонентам первого и по меньшей мере второго сигналов для определения расстояния и скорости изменения расстояния до спутника; причем процесс фильтрации содержит применение фильтра Калмана.
Настоящее изобретение теперь будет описано лишь в качестве примера и со ссылками на сопровождающие чертежи, на которых:
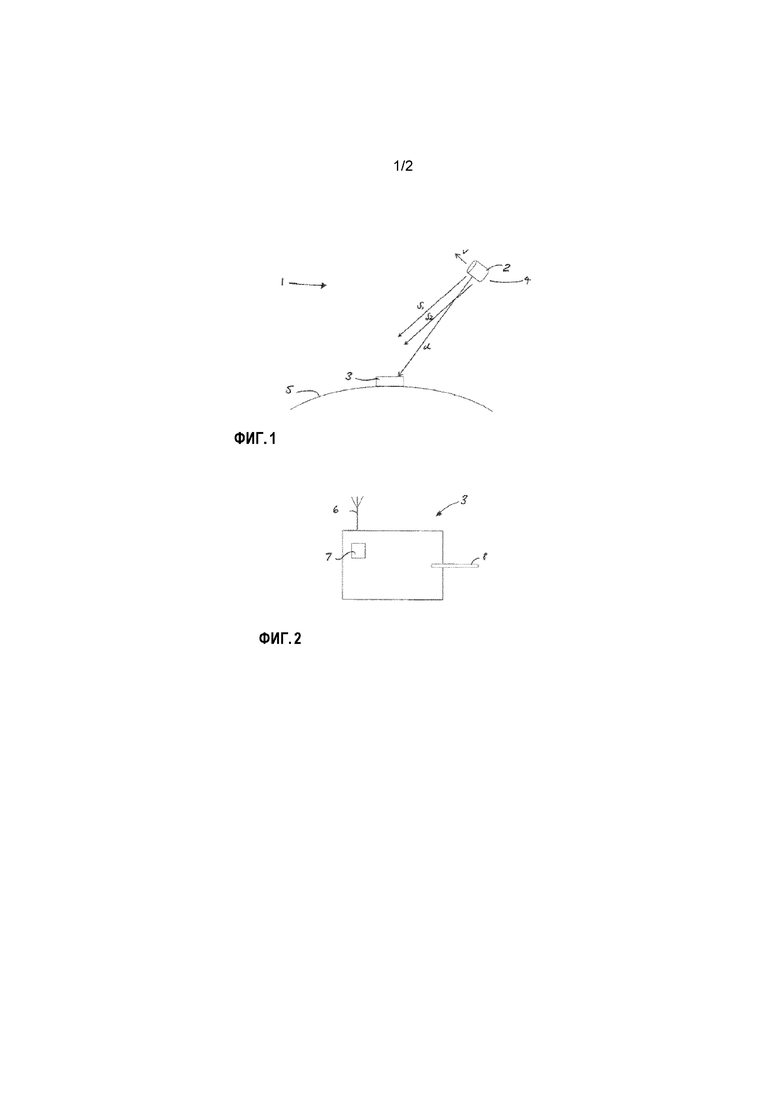
Фиг. 1 показывает схематичное представление спутника и блока приемника, установленных для функционирования в качестве части GNSS сети в рамках первого варианта осуществления настоящего изобретения;
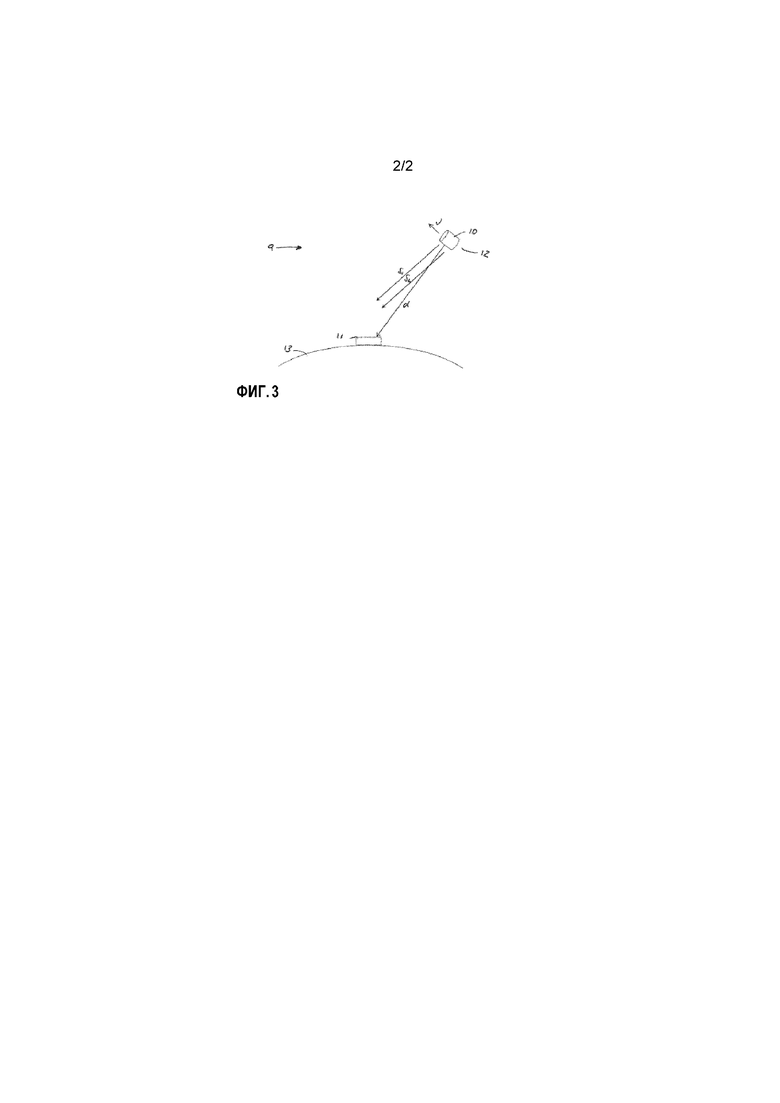
Фиг. 2 представляет собой схематичное изображение блока приемника, используемого в сети, показанной на фиг. 1; и
Фиг. 3 показывает схематичное представление спутника и блока приемника, установленных для функционирования в качестве части GNSS сети в рамках второго варианта осуществления настоящего изобретения.
Настоящее изобретение принимает подход с использованием фильтра Калмана в качестве основы архитектуры отслеживания для множества сигналов, принимаемых приемником от того же самого спутника. При приеме первого сигнала, передаваемого спутником, и приеме второго сигнала, передаваемого тем же самым спутником, процесс предварительной фильтрации может быть применен для определения совокупных синфазных и квадратурных компонентов первого и второго сигналов. Это позволяет тогда применять процесс фильтрации к совокупным синфазным и квадратурным компонентам первого и второго сигналов для определения расстояния и скорости изменения расстояния до спутника. Процесс фильтрации представляет собой фильтр Калмана, который предоставляет ряд преимуществ при использовании по отношению к сигналам от одного спутника, как описано более подробно ниже.
На фиг. 1 показано схематичное представление спутника и блока приемника, установленных, чтобы функционировать как часть GNSS сети в рамках первого варианта осуществления настоящего изобретения. Сеть 1 содержит спутник 2 (с дополнительными спутниками в сети (не показаны)) и блок 3 приемника. Спутник 2 находится на орбите 4 над поверхностью Земли 5, а блок 3 приемника расположен на поверхности Землю 5. Спутник 2 расположен таким образом, что он отделен от блока 3 приемника расстоянием r, а относительная скорость между спутником 2 и блоком 3 приемника является скоростью изменения расстояния, v. Во время t1, спутник 2 передает первый сигнал s1, имеющий частоту f1, к блоку 3 приемника. Во время t2, тот же самый спутник 2 передает второй сигнал s2, также имеющий частоту f2, к блоку 3 приемника.
Фиг. 2 представляет собой схематичное изображение блока приемника, используемого в сети, показанной на фиг. 1. Блок 3 приемника содержит приемник 6, микропроцессор 7 и выход 8 дисплея. Выход 8 дисплея может составлять единое целое с блоком 3 приемника (например, в качестве жидкокристаллического дисплея или другого визуального дисплея) или может быть соединен непосредственно или опосредованно с дисплеем (например, через шину или другое подобное соединительное устройство с дополнительными аппаратными средствами или средствами обработки, подсоединенными между ними или без них). Первый сигнал s1 и второй сигнал s2 принимаются в приемнике 6. Микропроцессор 7 содержит средства предварительной фильтрации, чтобы, во-первых, выбрать синфазные и квадратурные компоненты первого s1 и второго s2 сигналов, а во-вторых, чтобы суммировать подобные компонентам между собой, образуя совокупные синфазный и квадратурный выходы. Совокупные синфазные и квадратурные компоненты затем подвергаются процессу фильтрации для определения расстояния и скорости изменения расстояния до спутника 2. Процесс фильтрации содержит использование фильтра Калмана.
Фильтр Калмана является модулем линейной квадратичной оценки, который использует динамическую модель системы, такую как физические законы движения, известные управляющие входы в систему и несколько последовательных измерений, чтобы сформировать оценку изменяющихся величин системы, которая является более точной, чем оценка, полученная с использованием любого одного измерения в отдельности. Фильтр Калмана усредняет предсказание состояния системы с использованием взвешенных средних значений, таким образом, что результат средневзвешенного вычисления является состоянием, которое лежит между измеренным состоянием и оцененным состоянием, но является более точным, чем любое одно в виду его оцененной неопределенности. Процесс является рекурсивным итерационным процессом, так как только новая оценка и ее ковариация (используемые в системе взвешивания в качестве оценки неопределенности в предсказываемом состоянии) используются в следующей итерации. Неопределенность измерений может оказаться трудно определить количественно, следовательно, производительность фильтра часто рассматривается с точки зрения выигрыша. Низкий выигрыш Калмана делает акцент на предсказаниях, сглаживая шум в данных, а высокий выигрыш Калмана делает акцент на измерениях.
Модель фильтра Калмана предполагает, что истинное состояние системы во время k выводится из состояния во время k-1, в соответствии с уравнением 1:
xk=Fkxk-1+Bkuk+wk Уравнение 1
где Fk представляет собой модель перехода состояния применительно к предыдущему состоянию в xk-1
Bk является моделью управляющего входа, применяемой к вектору управления uk
wk является шумом на основе нормального распределения ковариации Qk, wk~N(0, Qk)
Во время k наблюдение из zk истинного состояния xk осуществляется в соответствии с уравнением 2:
zk=Нkxk+vk Уравнение 2
где Нk является моделью наблюдения, которая отображает истинное пространство состояний в наблюдаемое пространство, и vk является шумом наблюдения, который предполагается имеющим гауссово распределение с ковариацией Rk, vk~N(0, Rk). Начальное состояние и векторы шума на каждом этапе предполагаются независимыми.
После того, как фильтр Калмана был применен к компонентам первого s1 и второго s2 сигналов, и расстояние и скорость изменения расстояния получены, они вводятся в алгоритм, исполняемый микропроцессором 7, который определяет местоположение блока 3 приемника с помощью триангуляции сигналов от нескольких спутников. Это позволяет точно определить долготу, широту и высоту. Метод фильтра Калмана может быть использован для множества сигналов, принимаемых от каждого одиночного спутника, используемого в процессе триангуляции, или для одного или нескольких, в зависимости от условий среды и/или интенсивности сигнала.
Использование фильтра Калмана для определения расстояния и скорости изменения расстояния и, следовательно, отслеживания сигналов от одного спутника имеет множество преимуществ. Путем объединения отслеживания нескольких спутниковых сигналов в один следящий фильтр, более сильные сигналы могут быть использованы для облегчения отслеживания более слабых сигналов. Повторный захват сигналов вслед за пропаданиями сигналов выполняется более быстро, так как оценки расстояния и скорости изменения расстояния поддерживаются путем отслеживания оставшихся сигналов, например, если сигнал конкретной частоты блокируется или определенный спутник недоступен. Шум в оценке, представленной в алгоритм генерации измерений, который определяет местоположение принимающего блока 2, также уменьшается, поскольку используется больше сигналов, что приводит к более точным навигационным решениям. В дополнении, модель ионосферной и тропосферной задержки поддерживается с помощью фильтра с временем корреляции, равным минутам или более, вновь достаточным для поддержания производительности даже при значительном пропадании сигнала.
Вариации интенсивности сигнала могут быть вызваны различными эффектами, в том числе эффектами медленного замирания (например, многолучевыми сигналами и сигналами затенения такими объектами, как сооружения при работе стационарной станции) или эффектами быстрого замирания (проблемы многолучевого сигнала для работы мобильной станции). Если вариации быстрые, например, на частотах выше 10-20 Гц, метод фильтрации Калмана может быть использован, чтобы режектировать такие вариации при определении местоположения. Если один или два сигнала подавлены помехами, преднамеренно или непреднамеренно, способ согласно настоящему изобретению компенсирует потери сигнала за счет использования каких-либо других сигналов остальных частот, передаваемых спутником, для поддержки производительности следящего фильтра.
В альтернативном варианте осуществления настоящего изобретения, этот аспект фильтра Калмана исследован дополнительно. На фиг. 3 показано схематичное представление спутника и блока приемника, установленных, чтобы функционировать как часть GNSS сети в рамках второго варианта осуществления настоящего изобретения. Сеть 9 содержит спутник 10 (с дополнительными спутниками в пределах сети (не показаны)) и блок 11 приемника. Спутник 10 находится на орбите 12 над поверхностью Земли 13, а блок 11 приемника расположен на поверхности Земли 13. Спутник 10 расположен таким образом, что он отделен от блока 11 приемника расстоянием r, и относительная скорость между спутником 10 и блоком 11 приемника является скоростью изменения расстояния, v. В момент времени t1, спутник 10 передает первый сигнал s1, имеющий частоту f1, к блоку 11 приемника. Во время t2, тот же самый спутник 10 также передает второй сигнал s2, имеющий частоту f2, к блоку 11 приемника, причем f1≠f2. Как описано выше на фиг. 2, блок 11 приемника содержит приемник 6, микропроцессор 7 и выход 8 дисплея. Выход 8 дисплея может составлять единое целое с блоком 11 приемника (например, в качестве жидкокристаллического дисплея или другого визуального дисплея) или может быть соединен непосредственно или опосредованного с дисплеем (например, через шину или другое подобное соединительное устройство, с дополнительными аппаратными средствами или средствами обработки, подсоединенными между ними, или без них). Первый сигнал s1 и второй сигнал s2 принимаются в приемнике 6. Микропроцессор 7 содержит средства предварительной фильтрации, чтобы, во-первых, выбрать синфазные и квадратурные компоненты первого s1 и второго s2 сигналов, а во-вторых, чтобы суммировать подобные компоненты между собой, образуя совокупные синфазный и квадратурный выходы. Совокупные синфазные и квадратурные компоненты затем подвергаются процессу фильтрации для определения расстояния и скорости изменения расстояния до спутника 2. Как уже описано выше, процесс фильтрации содержит использование фильтра Калмана.
Другие варианты осуществления, входящие в объем формулы изобретения, будут очевидны специалистам в данной области техники. Например, блок 3, 11 приемника может быть стационарным (операция стационарной станции), движущимся (операция мобильной станции), автономным блоком или включенным в другое устройство, может находиться на поверхности Земли в или на объекте, движущемся над поверхностью Земли, таком как самолет.
Изобретение относится к области спутниковой связи. Техническим результатом является определение расстояния и скорости изменения расстояния от одного спутника с улучшенным отношением сигнал-шум. Способ отслеживания множества сигналов от одного спутника содержит (s1) прием первого сигнала, передаваемого спутником 2; прием по меньшей мере второго сигнала (s2), передаваемого тем же самым спутником; применение процесса предварительной фильтрации, чтобы определить совокупные синфазные и квадратурные компоненты первого, второго сигналов и опционально любых других сигналов; и применение процесса фильтрации к совокупным синфазным и квадратурным компонентам первого и по меньшей мере второго сигналов для определения расстояния (r) и скорости изменения расстояния (v) до спутника; причем процесс фильтрации содержит применение фильтра Калмана. 2 н. и 4 з.п. ф-лы, 3 ил.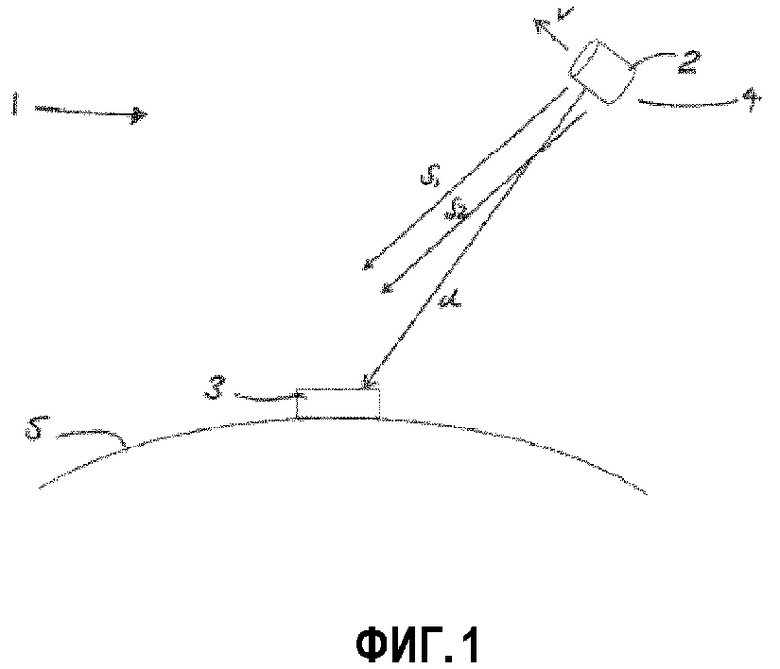
1. Способ отслеживания множества сигналов от одного спутника, содержащий этапы, на которых:
принимают первый сигнал, передаваемый спутником;
принимают по меньшей мере второй сигнал, передаваемый тем же самым спутником;
применяют процесс предварительной фильтрации для определения совокупных синфазных и квадратурных компонентов первого и по меньшей мере второго сигналов; и
применяют процесс фильтрации к совокупным синфазным и квадратурным компонентам первого и по меньшей мере второго сигналов для определения расстояния и скорости изменения расстояния до спутника;
причем процесс фильтрации содержит этап, на котором применяют фильтр Калмана.
2. Способ по п. 1, в котором первый и по меньшей мере второй сигналы имеют разные частоты.
3. Способ по п. 1, в котором первый и по меньшей мере второй сигналы имеют одинаковую частоту.
4. Способ по п. 3, в котором первый и по меньшей мере второй сигналы передаются в разное время.
5. Способ по любому из предыдущих пунктов, причем способ повторяется с использованием сигналов от множества различных спутников для формирования расстояния и скорости изменения расстояния для каждого спутника, и местоположение объекта вычисляется с использованием данных расстояния и скорости изменения расстояния, сформированных таким образом.
6. Система для отслеживания множества сигналов от одного спутника, содержащая:
блок приемника, выполненный с возможностью приема первого сигнала, передаваемого спутником, и по меньшей мере второго сигнала, передаваемого тем же самым спутником; и
микропроцессор, выполненный с возможностью применения процесса предварительной фильтрации для определения совокупных синфазных и квадратурных компонентов первого и по меньшей мере второго сигналов, и процесса фильтрации к совокупным синфазным и квадратурным компонентам первого и по меньшей мере второго сигналов для определения расстояния и скорости изменения расстояния до спутника;
причем процесс фильтрации содержит применение фильтра Калмана.
| US2007211791 A1, 13.09.2007 | |||
| US2008165053 A1, 10.07.2008 | |||
| US7151486 B2, 19.12.2006 | |||
| US6665612 B1, 16.12.2003 | |||
| RU2013137442 A, 20.02.2015. |

