Изобретение касается способа эксплуатации нескольких кранов, движения которых с помощью устройств для предупреждения столкновений кранов контролируются на угрожающие столкновения, а также краны, имеющие по меньшей мере одно движущее устройство для движения кранового элемента, блок управления для активирования движущего устройства, а также устройство для предупреждения столкновений для контроля крановых движений кранового элемента на возможные столкновения с другим краном.
На стройплощадках, как правило, одновременно применяются несколько кранов, рабочие области которых, обычно круговые, частично перекрываются, что может быть обусловлено, с одной стороны, пространственными условиями стройплощадки, а с другой стороны, также необходимо, чтобы, несмотря на круговые рабочие области, достигать как можно более полного покрытия площади стройплощадки. Чтобы в области этого частичного перекрытия рабочих областей кранов предотвратить столкновения между кранами, в частности их стрелами, краны обычно оснащаются устройствами для предупреждения столкновений, которые контролируют движения кранов и в угрожающей столкновением рабочей области, то есть в вышеназванной области перекрытия, вмешиваются в крановое управление, чтобы замедлить или прекратить движения, когда угрожает столкновение.
При этом названные устройства для предупреждения столкновений могут с помощью надлежащей сенсорики определять положение, соответственно, позицию и движение собственно крана, например, с помощью сельсин-датчика на механизме вращения – ориентацию стрелы вокруг вертикальной оси вращения, с помощью сенсора качания – положение качания стрелы, или с помощью сенсора каретки крана – положение каретки на стреле и вместе с тем вылет подъемного троса крана. По устанавливаемым областям столкновения устройство для предупреждения столкновений на основе регистрируемой сенсорами позиции крана знает, когда кран движется в вышеназванной области перекрытия, которая скрывает в себе риск столкновения с другим краном. С другой стороны, устройства для предупреждения столкновений кранов могут поддерживать связь друг с другом, так что каждое устройство для предупреждения столкновений знает, движется ли другой кран тоже в области перекрытия, соответственно, направляется в нее. Для этого устройства для предупреждения столкновений передают соответствующие определенные сенсорами или иным образом данные позиции и/или состояния «своего» крана устройствам для предупреждения столкновений других кранов, так что устройство для предупреждения столкновений каждого крана может учитывать данные позиции и/или состояния других кранов, когда речь идет о решении, нужно ли вмешаться в крановое управление и влиять на соответствующее крановое движение, в частности прекратить его.
Однако такая система для предупреждения столкновений, которая включает в себя соединенные посредством сети устройства для предупреждения столкновений отдельных кранов, в определенных ситуациях может приводить к ограничениям, которые нежелательным образом препятствуют работе стройплощадки. В частности, когда какой-либо кран выведен из эксплуатации, например, находится в свободно вращающемся по ветру положении, до сих пор обычно невозможно вывести этот необслуживаемый кран из области столкновения, так что другой кран, рабочая область которого перекрывается с необслуживаемым краном, соответственно имеет препятствие в своем радиусе действий. Так как устройству для предупреждения столкновений разрешено влиять только на движения собственного крана в зависимости от информации о позиции и/или статусе, необслуживаемый кран не может задействоваться и отодвигаться. Обычно должен приходить крановщик, чтобы активировать необслуживаемый кран и вывести из области столкновения, или рабочая задача крана, имеющего препятствие, должна откладываться, пока также необслуживаемый кран снова не будет обслуживаемым.
Чтобы избежать, соответственно, уменьшить создание препятствие в рабочей области одного крана другими кранами, которые не обслуживаются, соответственно, выведены из эксплуатации, в публикации FR 30 30 469 A1 предлагается не полностью выводить из эксплуатации необслуживаемый кран в свободно вращающемся по ветру положении, а переключать в режим автопилота, в котором этот кран, однако, может свободно ориентироваться по ветру, пока никакой другой кран не хочет поехать в область столкновения. Однако когда соседний кран хочет поехать в область столкновения, функция автопилота автоматически выводит необслуживаемый кран из области перекрытия. В упомянутом режиме автопилота устройство для предупреждения столкновений необслуживаемого крана продолжает принимать данные позиции, соответственно, движения соседнего крана, чтобы затем, когда соседний кран приблизится к области перекрытия, в случае необходимости автоматически вывести необслуживаемый кран из области перекрытия, причем этот кран вращается лишь настолько, чтобы его стрела распространялась приблизительно по касательной к круговой рабочей области соседнего крана, чтобы по возможности уменьшить угрожающее, дополнительное сопротивление ветру.
Однако такая функция автопилота требует сложной структуры кранового управления, а также крановой сенсорики, чтобы можно было с достаточной надежностью совершать автоматизированные движения крана без контроля крановщиком. Традиционные краны часто не способны к этому, соответственно, должны были бы затратным образом дополнительно оснащаться, чтобы можно было обеспечить такие автоматизированные движения крана из области столкновения, соответственно, совершать их с достаточной надежностью.
Поэтому в основе настоящего изобретения лежит задача, создать улучшенный способ, а также улучшенный кран вышеназванного вида, устранить недостатки уровня техники и предпочтительным образом усовершенствовать последний. В частности, должно быть создано улучшенное использование и исполнение устройства для предупреждения столкновений, которое надежно предотвратит столкновения кранов, но одновременно устранит нежелательные препятствия для рабочих задач, не нуждаясь для этого в сложных дополнительных оснастках кранового управления.
В соответствии с изобретением названная задача решается с помощью способа по п.1 формулы изобретения, а также крана по п.13 формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Итак, предлагается выводить мешающий, необслуживаемый кран с поддержкой оператора и тем самым под контролем крановщика из области столкновения, чтобы позволить соседнему крану, который под контролем своего устройства для предупреждения столкновений в ином случае не мог бы въезжать в область перекрытия с необслуживаемым краном, выполнять свою рабочую задачу. В соответствии с изобретением предлагается, чтобы при угрожающем столкновении между первым, находящимся в эксплуатации краном и вторым, не находящимся в эксплуатации краном первый кран останавливался, создавалось соединение для дистанционного управления от первого крана ко второму крану, второй кран с помощью управляющих команд, которые подготавливаются на первом, остановленном кране и передаются через соединение для дистанционного управления ко второму крану, выводился из области столкновения, которая мешает намеченному движению первого крана, и второй кран после дистанционно управляемого вывода из области столкновения останавливался, а также первый кран снова приводился в действие, так чтобы первый кран мог осуществлять свою задачу. Благодаря этому собственно необслуживаемый, не находящийся в эксплуатации кран, когда он мешает рабочей задаче соседнего крана, может надежно, под контролем крановщика соседнего крана, выводиться из области столкновения, без необходимости для этого сложного полностью автоматизированного кранового управления этого крана, которое обеспечивает возможность автоматизированных движений крана.
В усовершенствовании изобретения управляющие команды передаются через сеть устройств для предупреждения столкновений, через которую обычно передаются данные позиции и/или состояния кранов между устройствами для предупреждения столкновений. В принципе, можно было бы также предусмотреть для передачи управляющих команд от временно остановленного крана к дистанционно управляемому крану отдельный канал связи, по которому передаются только управляющие команды. Однако использование сети связи между устройствами для предупреждения столкновений особенно предпочтительно, так как используется уже имеющаяся инфраструктура, и устройства для предупреждения столкновений могут непосредственно контролировать ожидаемые движения на основе управляющих команд.
Названные управляющие команды для дистанционного управления отодвигаемым краном могут создаваться на вышеназванном первом кране собственно различным образом. Предпочтительным образом для этого может использоваться блок управления и его средства ввода, который сам по себе имеется для управления первым краном. В частности, управляющие команды для дистанционного управления вторым краном могут создаваться при задействовании средств ввода блока управления первого крана и затем посредством названного соединения связи для дистанционного управления передаваться второму крану. При этом названные средства ввода могут быть выполнены с возможностью ручного управления, а также включать в себя другие средства ввода, которые, например, могут приводиться в действие акустически или с помощью жестового управления или иным образом. Такие средства ввода могут, например, включать в себя джойстик, управляющий выключатель и/или ползунок, вращающуюся ручку или сенсорный экран. В частности, названные средства ввода могут быть предусмотрены в кабине крановщика каждого крана. Но при необходимости могут также применяться средства ввода переносного блока приведения в действие и/или управления первого крана, посредством которых названный первый кран может приводиться в действие находящимся на земле крановщиком. Так как «собственный» первый кран, к которому собственно относится этот блок управления вместе со средствами ввода, остановлен, созданные им управляющие команды выполняются не собственно первым краном, а через соединение для дистанционного управления могут передаваться второму крану. При этом блок управления первого крана и/или его устройство для предупреждения столкновений работает в режиме дистанционного управления, в котором созданные на средствах ввода управляющие команды не применяются для активирования приводов собственного крана, а через соединение для дистанционного управления посылаются второму крану.
Но альтернативно или дополнительно управляющие команды для дистанционного управления вторым краном могут также генерироваться автоматически или полуавтоматически модулем управления движением устройства для предупреждения столкновений первого крана, когда названным образом первый кран был остановлен, и было создано соединение для дистанционного управления со вторым краном. Такой модуль управления движением может быть, например, выполнен в виде блока программного обеспечения в электронном выполненном устройстве для предупреждения столкновений и там, например, заложен в память, а также отрабатываться микропроцессором устройства для предупреждения столкновений. При этом названный модуль управления движением может генерировать управляющие команды для дистанционного управления вторым краном и вывода второго крана из области столкновения на основе данных позиции и/или статуса, которые второй кран передает первому крану, и/или на основе данных позиции и/или статуса, которые устройство для предупреждения столкновений первого крана определило в отношении первого крана.
При этом полуавтоматическая генерация управляющих команд для дистанционного управления отодвигаемым краном с помощью названного модуля управления движением устройства для предупреждения столкновений первого крана может осуществляться таким образом, что крановщику первого крана делается предложение соответствующей управляющей команды, например, на дисплее или другом отображающем устройстве, при необходимости в комбинации с требованием подтверждения, так что крановщик может подтвердить предложенную управляющую команду, если он считает это целесообразным. Но в другом варианте осуществления генерация на первом кране управляющих команд для дистанционного управления вторым краном может осуществляться также полностью автоматизированным образом.
Несмотря на это, дистанционное управление вторым краном может также осуществляться полностью в ручном режиме, что при необходимости может включать в себя также акустические, выполняемые по технологии жестов или другие управляющие вводы. Для этого крановщик первого крана может собственно привычным образом задействовать его крановое управление и соответствующие средства ввода для дистанционного управления вторым краном и вывода его из области столкновения. Это делает возможным особенно простое исполнение блоков кранового управления, которые могут оставаться выполненными традиционным образом, и могут только снабжаться интерфейсом для приема и/или подачи (выдачи) команд дистанционного управления.
Принимаемые на блоке управления второго крана управляющие команды дистанционного управления собственно привычным образом отрабатываются блоком управления второго крана, в частности обрабатываются как управляющие сигналы, которые были бы введены на средствах ввода блока управления второго крана. Блок управления второго крана может преобразовывать принимаемые сигналы дистанционного управления в соответствующие активирующие сигналы по меньшей мере одному движущему устройству второго крана, чтобы приводить в действие, соответственно, ускорять или останавливать его приводы.
В зависимости от исполнения и расположения кранов, а также их соответствующего положения, посредством устройства дистанционного управления устройств для предупреждения столкновений может осуществляться дистанционное управление разными движениями. В частности, названным образом может задействоваться механизм вращения второго крана, чтобы вращать его стрелу вокруг вертикальной оси и тем самым двигать из области столкновения. Если краны, в частности их стрелы, расположены на различных высотах, при известных условиях может быть также достаточно, передвинуть каретку более высокого крана дальше внутрь, чтобы вывести сходящий с каретки подъемный трос из области столкновения с первым краном. В этом случае названное устройство дистанционного управления может инициировать движение каретки второго крана. Если краны имеют качающиеся стрелы, устройство дистанционного управления может также исключать столкновение таким образом, что стрела второго крана качается вверх и за счет этого ее вылет уменьшается, что может осуществляться, например, в комбинации с вращением стрелы вокруг ее вертикальной оси.
С точки зрения временного графика может быть предпочтительно, когда вышеназванные этапы останова первого канна и создания соединения для дистанционного управления осуществляются друг за другом упорядоченным образом. В частности, сначала может останавливаться первый кран, прежде чем затем будет создано соединение для дистанционного управления между первым краном и вторым краном. И наоборот, после осуществленного дистанционно управляемого вывода второго крана из области столкновения сначала соединение для дистанционного управления может снова прерываться, прежде чем будет снова приведен в действие первый кран.
Упомянутый останов первого крана может предполагать, что все устройства привода выводятся из действия, соответственно, останавливаются или деактивируются, и соответствующие движущие устройства затормаживаются. В частности, останавливаются и затормаживаются механизм вращения для вращения стрелы вокруг вертикальной оси и/или подъемный механизм для подъема подъемного троса и закрепленного на нем грузового крюка и/или привод каретки для передвижения каретки.
Чтобы гарантировать, что при задействовании средств ввода блока управления первого крана генерированные ими управляющие команды будут применяться только для дистанционного управления вторым краном и не вызовут активирования, соответственно, движений приводов самого первого крана, названный останов первого крана может также подразумевать, что деактивируются соединения для управляющих команд между блоком управления первого крана и его движущими устройствами, и/или устройства привода отсоединяются по технике управления от блока управления, и/или генерированные управляющие команды, так сказать, переводятся к устройству дистанционного управления. Например, в режиме дистанционного управления сигнальные выходы средств ввода могут подключаться к модулю дистанционного управления и быть отсоединены от обычных соединений для управляющих сигналов с устройствами привода первого крана. В технике аппаратного обеспечения это может осуществляться с помощью соответствующих переходов сигнала, а также в технике программного обеспечения, например, с помощью соответствующего управления посредством шины данных.
По другому аспекту настоящего изобретения описанный модуль дистанционного управления может использоваться не только для того, чтобы выводить необслуживаемый, мешающий кран из области перекрытия, но и для других рабочих задач крана. В частности, с его помощью простым образом может осуществляться управление и выполнение взаимно согласованных крановых движений нескольких кранов, таких как, например, тандемные подъемы. В частности, несколько кранов могут двигаться взаимно согласованно, при этом по меньшей мере на одном первом кране его устройством для предупреждения столкновений определяются данные движения и/или позиции и/или состояния и/или управляющие команды для движения первого крана во время взаимно согласованного движения и передаются второму крану, при этом определенные на первом кране данные движения и/или позиции и/или состояния и/или управляющие команды первого крана отображаются на отображающем устройстве на втором кране и/или применяются блоком управления названного второго крана для управления по меньшей мере одним движущим устройством первого и/или второго крана для совершения согласованного друг с другом движения.
По сравнению с прежним согласованием, которое осуществляется по существу таким образом, что оба крановщика при тандемном подъеме держат связь друг с другом посредством беспроводных переговорных устройств и при необходимости поддерживаются внешним надзором, в немалой степени облегчает задачу, когда каждый крановщик непрерывно или по меньшей мере поэтапно получает в виде текущего голосового оповещения, соответственно, отображения точную информацию о позиции и/или движении другого крана, как только она определяется соответствующим устройством для предупреждения столкновений. Также полезно, когда альтернативно или дополнительно также обоюдно отображаются управляющие команды, так что могут предугадываться инициированные данными управляющими командами крановые движения соответственно другого крана.
Альтернативно или дополнительно к такому обоюдному отображению данных позиции и/или движения и/или состояния и/или управляющих команд передаваемые объединенными друг с другом в сеть устройствами для предупреждения столкновений данные, соответственно, информация и/или управляющие команды могут также использоваться для того, чтобы полуавтоматически или автоматически влиять на согласуемые друг с другом крановые движения. В частности, применительно к уже поясненному выше режиму дистанционного управления, один из кранов, соответственно, его блок управления может обрабатывать переданные данные позиции и/или движения и/или состояния и/или переданные управляющие команды таким образом, чтобы по меньшей мере одно движущее устройство активировалось так, чтобы принимающий названные данные, соответственно, управляющие команды кран совершал крановое движение, которое желательным образом воспроизводит крановое движение другого крана. В частности, на основе принятых данных и/или управляющих команд может совершаться синхронное крановое движение. При этом созданные на одном кране управляющие команды могут применяться как для активирования приводов «собственного» крана, так и, посредством передачи через дистанционное управление, для активирования приводов указанного по меньшей мере одного другого крана, так что крановщик на первом кране одновременно управляет также вторым краном, соответственно, с помощью блока управления крана одновременно активируются два крана.
Однако, в зависимости от желательного согласования крановых движений, это не должно быть фактически синхронное или идентичное по направлению крановое движение. Например, это может быть встречное крановое движение, когда совместно поднимаемый предмет должен вращаться или должен двигаться из горизонтального положения захвата в слегка наклонное положение монтажа.
В частности, блок управления соответствующего крана может иметь подчиненный рабочий режим, в котором блок управления крана на основе переданных данных движения и/или управляющих команд активирует по меньшей мере одно движущее устройство таким образом, что кран желательным образом следует крановым движениям крана, передающего данные, в частности по меньшей мере приблизительно синхронно или, например, во встречном направлении.
В усовершенствовании изобретения крановые движения на основе передаваемых в порядке обмена данных движения и/или позиции и/или статуса и/или управляющих команд, которые предоставляются поддерживающими связь друг с другом устройствами для предупреждения столкновений, могут согласоваться друг с другом таким образом, чтобы, например, краны совершали тандемный подъем (ход).
В предпочтительном усовершенствовании изобретения по меньшей мере блок управления одного крана может иметь обучающий режим, в котором блок управления изучает процесс движения и/или траекторию движения на основе данных движения и/или позиции и/или управляющих команд, которые передаются от другого крана. Например, вышеназванный режим дистанционного управления может использоваться для того, чтобы дистанционно управляемый кран обучить траектории движения, которая затем может вызываться, чтобы вместе с другим краном совершать названный тандемный подъем (ход) или какой-либо другой, взаимно согласованный крановый подъем (ход). Для такого обучения соответствующие данные и управляющие команды тоже могут передаваться через сеть связи устройств для предупреждения столкновений.
Ниже изобретение поясняется подробнее на одном из предпочтительных примеров осуществления и соответствующих чертежах. На чертежах показано:
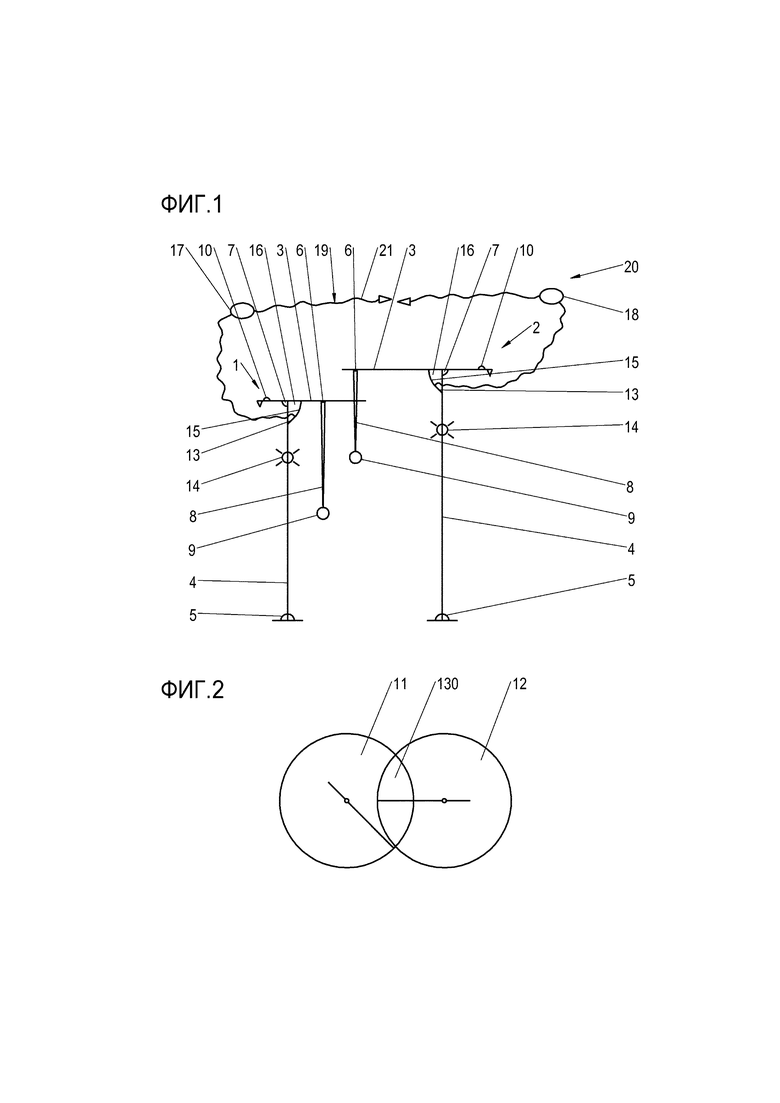
фиг.1: схематичное изображение двух кранов, которые имеют частично перекрывающиеся рабочие области и оснащены каждый устройствами для предупреждения столкновений, которые могут поддерживать связь друг с другом;
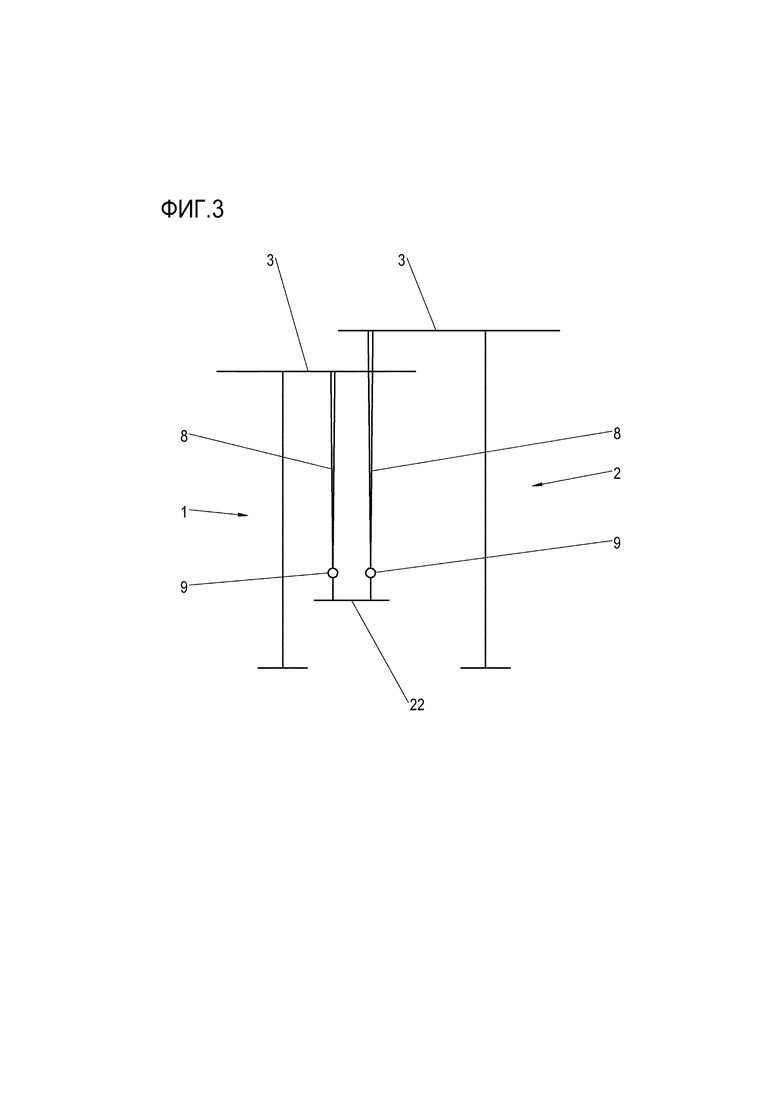
фиг.2: вид в плане двух кранов с фиг.1, который поясняет их перекрывающиеся рабочие области;
фиг.3: схематичный вид сбоку двух кранов с фиг.1 при совершении тандемного хода.
Как показано на фигурах, краны 1 и 2 могут быть выполнены каждый в виде башенных поворотных кранов, стрела 3 каждого из которых установлена на башне 4 и посредством механизма 5 вращения может вращаться вокруг вертикальной оси, при этом краны могут быть выполнены в виде верхнеповоротного крана и нижнеповоротного крана. Вдоль названной стрелы 3 с помощью механизма 7 передвижения каретки может передвигаться каретка 6, чтобы можно было изменять вылет сходящего с каретки 6 подъемного троса 8 и закрепленного на нем грузового крюка 9. Названный подъемный трос 8 может выбираться или выпускаться подъемным механизмом 10, чтобы поднимать, соответственно, опускать грузовой крюк 9.
Как показано на фиг.2, краны 1 и 2 могут иметь по существу круглые рабочие области 11, соответственно, 12, которые частично перекрываются, при этом перекрытие рабочих областей 11 и 12 обозначено ссылочной позицией 130. Названные рабочие области 11 и 12 получаются вследствие возможности вращения стрелы 3, а также возможности передвижения каретки 6.
Как показано на фиг.1, стрелы 3 кранов 1 и 2 могут быть расположены на разных высотах, так чтобы стрелы 3 могли собственно двигаться одна над другой, соответственно, одна под другой. Однако, в зависимости от положения каретки 6, могут, тем не менее, происходить столкновения со сходящим подъемным тросом 8. Но разумеется, что краны 1 и 2 могут быть расположены своими стрелами 3 также на одной и той же высоте, так что тогда стрелы 3 сами могли бы сталкиваться друг с другом.
Каждый из кранов 1 и 2 имеет крановое управление, имеющее электронный блок 13 управления, который, например, может иметь микропроцессор, чтобы иметь возможность отрабатывать заложенные в памяти управляющие программы. Кроме того, каждый кран имеет сенсорику 14, чтобы иметь возможность определять движения и/или положение подвижных крановых элементов, в частности вращательное положение стрелы 3, положение каретки 6 на данной стреле 3, а также высоту грузового крюка 9. Это может определяться, например, с помощью сенсоров, которые предназначены для механизма 5 вращения, механизма 7 передвижения каретки и подъемного механизма 10. Альтернативно или дополнительно могут также находить применение GPS-сенсоры, которые могут находить позиции крановых элементов в глобальной позиционной системе. Могут быть также предусмотрены другие средства определения, такие как, например, радарные сенсоры.
С названным блоком 13 управления могут быть соединены средства 15 ввода для ввода управляющих команд, которые управляют движениями крана. Названные средства 15 ввода могут быть предусмотрены, например, в кабине 16 крановщика.
Кроме того, каждый из кранов 1 и 2 включает в себя устройство 17 и 18 для предупреждения столкновений, которое контролирует крановые движения каждого крана, например, путем оценки сигналов названной сенсорики 14. Как поясняет фиг.1, устройства 17 и 18 для предупреждения столкновений кранов 1 и 2 могут поддерживать друг с другом связь через сеть 19 связи системы 20 для предупреждения столкновений, к которой относятся устройства 17 и 18 для предупреждения столкновений, так что находящиеся под угрозой столкновения краны 1 и 2, соответственно, устройства 17 и 18 для предупреждения столкновений всегда знают, в каком положении находится другой кран, соответственно, какое движение совершает в данный момент другой кран. Для этого устройства 17 и 18 для предупреждения столкновений передают данные позиции и/или движения и/или статуса «своего» крана соответственно другому крану через названное соединение 19 для связи системы 20 для предупреждения столкновений.
Каждое из устройств 17 и 18 для предупреждения столкновений могут оценивать названные данные и для этого, например, выполнять программу определения столкновения, которая может быть заложена в памяти и осуществляться микропроцессором электронного устройства для предупреждения столкновений. При угрозе столкновения каждое устройство 17, соответственно, 18 для предупреждения столкновений может вмешиваться в управление своего собственного крана и, например, отображать крановщику предупреждающий сигнал и/или прекращать движение крана.
Если при совершаемом движении угрожает столкновение с необслуживаемым, выведенным из действия краном, можно поступать следующим образом.
Если, например, первый кран 1, как это показано на фиг.2, хочет въехать в область перекрытия 130 двух рабочих областей 11 и 12, когда там стоит стрела 3 необслуживаемого, не находящегося в эксплуатации второго крана 2, устройство 17 для предупреждения столкновений первого крана 1 сначала подает предупреждающий сигнал и при необходимости вмешивается в крановое управление первого крана 1, чтобы прекратить крановое движение и предотвратить столкновение.
Чтобы теперь можно было вывести необслуживаемый второй кран 2 из области 130 перекрытия, устройство 17 для предупреждения столкновений первого крана 1 останавливает первый кран 1, причем для этого могут останавливаться приводы и затормаживаться движущие устройства, в частности механизм 5 вращения, привод 7 передвижения каретки и подъемный механизм 10. Кроме того, блок 13 управления может включаться в режим дистанционного управления и/или деактивироваться соединение для управляющей команды блока 13 управления первого крана 1 с его устройствами привода, так чтобы задействование средств 15 ввода не могло вызывать движений перемещения у первого крана.
Чтобы можно было создать соединение для дистанционного управления со вторым краном 2, может также через сеть 19 связи системы 20 для предупреждения столкновений посылаться сигнал пуска от первого крана 1 второму крану 2, чтобы запустить его блок 13 управления и включить в режим дистанционного управления. Названный сигнал пуска может генерироваться устройством 17 для предупреждения столкновений первого крана, соответственно, его блоком 13 управления и через сеть 19 посылаться второму крану 2.
Если первый кран 1 названным образом остановлен, а второй кран 2 запущен, через сеть 19 связи системы 20 для предупреждения столкновений может создаваться соединение для удаленного доступа, соответственно, соединение 21 для дистанционного управления между двумя кранами, чтобы передать генерированные на первом кране 1 управляющие команды второму крану 2. Названные управляющие команды могут генерироваться путем задействования средств 15 ввода блока 13 управления первого крана, так что крановщик первого крана 1 собственно привычным образом может управлять вторым краном и выводить его из области столкновения, то есть области 130 перекрытия.
Когда второй кран 2 выведен из области 130 перекрытия, кран 2 через соединение 21 для дистанционного управления затормаживается и снова останавливается.
Тогда первый кран 1, соответственно, его устройство 17 для предупреждения столкновений и/или его блок 13 управления снова выходит из системы второго крана 2 и снова логинится в собственном управлении. В частности, снова деактивируется вышеназванное соединение 21 для дистанционного управления, и блок 13 управления первого крана 1 снова переводится из вышеназванного режима дистанционного управления в нормальный режим эксплуатации, чтобы снова управлять активированием собственных устройств привода.
В итоге первый кран 1 может совершать намеченное крановое движение в область 130 перекрытия, соответственно, за ее пределы.
Фиг.3 поясняет другую возможность применения, которая обеспечивает возможность названного режима дистанционного управления, соответственно, связи через систему 20 для предупреждения столкновений. В частности, два крана 1 и 2 могут простым образом совершать взаимно согласованные крановые движения, например, в виде тандемного подъема, при котором одна общее изделие 22 крепится к грузовым крюкам двух кранов 1 и 2 и совместно поднимается двумя кранами 1 и 2. При таком тандемном подъеме изделие 22 может подниматься и/или опускаться и/или передвигаться из первой точки во вторую точку, при этом путь передвижения может быть линейным или же кривым, при этом изделие 22 может сохранять свою ориентацию, соответственно, угловое положение в пространстве или же вращаться.
Для этого, прежде всего, в простом варианте осуществления изобретения может быть предусмотрено, чтобы поддерживающие друг с другом связь устройства 17 и 18 для предупреждения столкновений передавали определенные на их кране данные позиции и/или движения и/или статуса соответственно другому крану, при этом они отображаются на соответственно принимающем кране, например, на дисплее, на который может смотреть крановщик. Благодаря обоюдному отображению в порядке обмена названных данных на соответственно другом кране каждый крановщик всегда сразу знает, в какой позиции, соответственно, положении находится соответственно другой кран, соответственно, в каком направлении движется соответственно другой кран.
При этом альтернативно или дополнительно от одного крана к другому крану могут также передаваться управляющие команды и там, возможно, отображаться, при этом, например, управляющие команды, которые создаются на первом кране 1 путем задействования его средств ввода и соответственно двигают первый кран, могут передаваться ко второму крану 2. Если эти управляющие команды отображаются там, то есть на втором кране 2, находящийся там крановщик может соответственно выполнять соответствующие управляющие команды.
Однако альтернативно или дополнительно такие передаваемые от крана к крану управляющие команды могут также использоваться для того, чтобы двигать принимающий управляющие команды кран синхронно с посылающим управляющие команды краном. В вышеназванном режиме дистанционного управления принимающий блок управления может соответственно преобразовывать команды, чтобы двигать принимающий кран синхронно с посылающим краном.
Далее, уже описанным выше образом кран может также соответствующим образом обучаться, чтобы в обучающем режиме заучивать желательную траекторию движения, которая затем может активироваться, соответственно, вызываться для взаимно согласованного движения двух кранов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2719048C1 |
| Кран | 2018 |
|
RU2683918C1 |
| СИСТЕМА ДЛЯ ЦЕНТРАЛЬНОГО УПРАВЛЕНИЯ ОДНИМ ИЛИ НЕСКОЛЬКИМИ КРАНАМИ | 2016 |
|
RU2731939C2 |
| БАШЕННЫЙ ПОВОРОТНЫЙ КРАН | 2013 |
|
RU2623287C2 |
| СИМУЛЯТОР ПОДЪЕМНОГО КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ ВИЛОЧНОГО ПОГРУЗЧИКА | 2017 |
|
RU2730697C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДНЯТИЯ ГРУЗА | 2018 |
|
RU2768693C2 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО КРАНА НА КРАНОВОМ ПУТИ | 2005 |
|
RU2281241C2 |
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |
| КРАН | 2023 |
|
RU2812497C1 |
Предложен способ эксплуатации нескольких кранов. При угрожающем столкновении между первым находящимся в эксплуатации краном (1) и вторым не находящимся в эксплуатации краном (2) первый кран (1) останавливают, создают соединение (21) для дистанционного управления от первого крана (1) ко второму крану (2). Второй кран (2) с помощью управляющих команд, которые генерируются на первом остановленном кране (1) и через соединение (21) для дистанционного управления передаются ко второму крану (2), выводят из области столкновения, которая мешает намеченному движению первого крана (1). Второй кран (2) после дистанционно управляемого вывода из области столкновения останавливают, а первый кран (1) снова приводят в действие и перемещают. Предложены также способ эксплуатации нескольких кранов, краны. Достигается предотвращение столкновения кранов при одновременном устранении нежелательных препятствий для рабочих задач, не нуждаясь для этого в сложных дополнительных оснастках кранового управления. 4 н. и 12 з.п. ф-лы, 3 ил.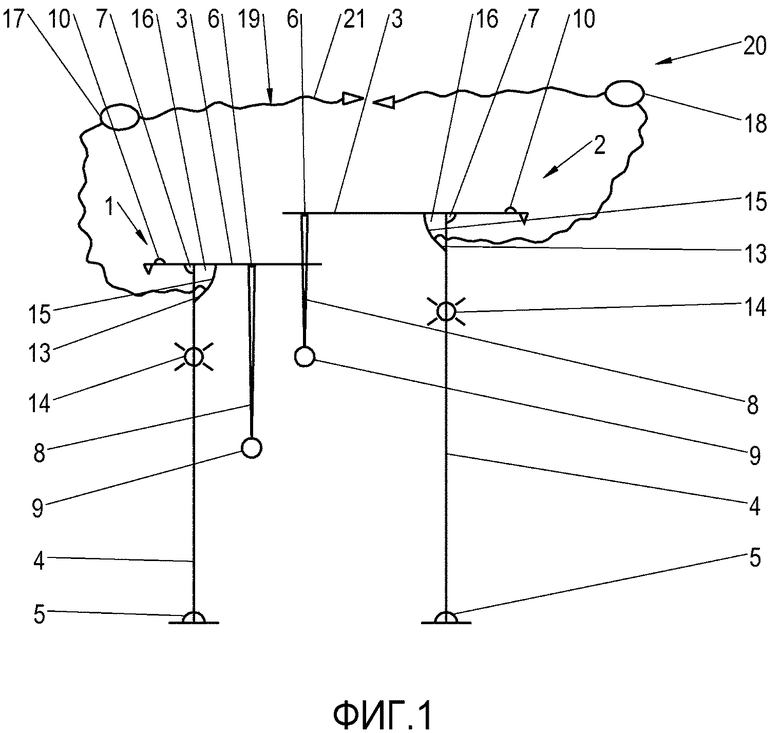
1. Способ эксплуатации нескольких кранов (1, 2), движения которых с помощью устройств (17, 18) для предупреждения столкновений кранов (1, 2) контролируют на угрожающие столкновения, отличающийся тем, что при угрожающем столкновении между первым, находящимся в эксплуатации краном (1) и вторым, не находящимся в эксплуатации краном (2)
- первый кран (1) останавливают,
- создают соединение (21) для дистанционного управления от первого крана (1) ко второму крану (2),
- второй кран (2) с помощью управляющих команд, которые генерируются на первом, остановленном кране (1) и через соединение (21) для дистанционного управления передаются ко второму крану (2), выводят из области (130) столкновения, которая мешает намеченному движению первого крана (1), и
- второй кран (2) после дистанционно управляемого вывода из области (130) столкновения останавливают, а первый кран (1) снова приводят в действие и перемещают.
2. Способ по п.1, при этом для создания соединения (21) для дистанционного управления блок (13) управления второго крана (2) с помощью команды пуска, которая передается через соединение (19) для связи между устройствами (17, 18) для предупреждения столкновений от первого крана (1) ко второму крану (2), запускается и приводится в режим дистанционного управления.
3. Способ по одному из предыдущих пунктов, при этом при останове первого крана (1) деактивируется соединение для управляющих команд между блоком (13) управления первого крана (1) и по меньшей мере одним движущим устройством первого крана (1) и/или активируется соединение для управляющих команд от средств (14) ввода блока (13) управления первого крана (1) к модулю дистанционного управления первого крана (1).
4. Способ по одному из предыдущих пунктов, при этом при останове первого крана (1) по меньшей мере одно движущее устройство первого крана (1), в частности его механизм (5) вращения, затормаживается.
5. Способ по одному из предыдущих пунктов, при этом создаются управляющие команды для дистанционно управляемого движения второго крана (2) в ручном режиме дистанционного управления путем задействования средств (14) ввода одного/указанного блока управления первого крана (1), которые предусмотрены для управления движениями первого крана (1).
6. Способ по одному из предыдущих пунктов, при этом управляющие команды для дистанционно управляемого движения второго крана (2) генерируются в автоматическом режиме дистанционного управления автоматически или полуавтоматически модулем управления движением устройства (17) для предупреждения столкновений первого крана (1).
7. Способ по п.6, при этом управляющие команды для дистанционно управляемого движения второго крана (2) генерируются названным модулем управления движением в зависимости от данных позиции и/или движения, которые характеризуют позицию и/или движение первого крана (1), и/или в зависимости от данных позиции, которые характеризуют позицию и/или положение второго крана (2) и были переданы/передаются от устройства (18) для предупреждения столкновений второго крана (2) устройству (17) для предупреждения столкновений первого крана (1).
8. Способ по одному из предыдущих пунктов, при этом управляющие команды для дистанционно управляемого движения второго крана (2) передаются от первого крана (1) ко второму крану (2) через одно/указанное соединение (19) для связи между устройствами (17, 18) для предупреждения столкновений.
9. Способ по одному из предыдущих пунктов, при этом первый кран (1) перед созданием соединения для дистанционного управления останавливается, и названное соединение для дистанционного управления заканчивается перед повторным приведением в действие первого крана (1).
10. Способ эксплуатации нескольких кранов (1, 2), движения которых с помощью устройств (17, 18) для предупреждения столкновений кранов (1, 2) контролируют на угрожающие столкновения, отличающийся тем, что несколько кранов (1, 2) движутся взаимно согласованным образом, при этом по меньшей мере на одном первом кране (1) во время взаимно согласуемого движения его устройством (17) для предупреждения столкновений определяются данные движения и/или позиции и/или статуса и/или управляющие команды и передаются второму крану (2), при этом определенные на первом кране (1) данные движения и/или позиции и/или статуса и/или управляющие команды отображаются на устройстве отображения на втором кране (2) и/или применяются блоком (13) управления второго крана (2) для управления по меньшей мере одним движущим устройством первого и/или второго крана (2) для совершения взаимно согласованного движения.
11. Способ по п.10, при этом блок (13) управления второго крана (2) имеет подчиненный режим эксплуатации, в котором блок (13) управления второго крана (2) на основе переданных данных движения и/или позиции и/или статуса первого крана и/или на основе переданных первым краном (1) управляющих команд активирует по меньшей мере одно движущее устройство второго крана (2) таким образом, что второй кран (2) по меньшей мере приблизительно синхронно следует крановым движениям первого крана и/или предопределенным образом преобразует их в крановые движения второго крана.
12. Способ по п.10 или 11, при этом крановые движения обоих кранов (1, 2) на основе передаваемых в порядке обмена данных движения и/или позиции и/или статуса и/или управляющих команд, которые предоставляются и/или передаются устройствами (17, 18) для предупреждения столкновений, взаимно согласовываются таким образом, что краны (1, 2) совершают тандемный подъем.
13. Кран, имеющий по меньшей мере одно движущее устройство для движения кранового элемента, блок (13) управления для активирования движущего устройства, а также устройство (17) для предупреждения столкновений для контроля крановых движений крановых элементов на возможные столкновения с другим краном (2), отличающийся тем, что устройство (17) для предупреждения столкновений имеет режим эксплуатации для дистанционного управления, в котором при угрожающем столкновении между первым, находящимся в эксплуатации краном (1) и вторым, не находящимся в эксплуатации краном (2)
- первый кран (1) останавливают,
- создают соединение (21) для дистанционного управления от первого крана (1) ко второму крану (2),
- второй кран (2) с помощью управляющих команд, которые генерируются на первом остановленном кране (1) и через соединение (21) для дистанционного управления передаются ко второму крану (2), выводят из области (130) столкновения, которая мешает намеченному движению первого крана (1), и
- второй кран (2) после дистанционно управляемого вывода из области (130) столкновения останавливают, и первый кран (1) снова приводят в действие и перемещают.
14. Кран, имеющий по меньшей мере одно движущее устройство для движения кранового элемента, блок (13) управления для активирования движущего устройства, а также устройство (17) для предупреждения столкновений для контроля крановых движений крановых элементов на возможные столкновения с другим краном (2), отличающийся тем, что устройство (17) для предупреждения столкновений имеет режим эксплуатации для координации движения, в котором движение крана согласуется с движением другого, второго крана, причем во время взаимно согласуемого движения устройством (17) для предупреждения столкновений определяются данные движения и/или позиции и/или статуса и/или управляющие команды и передаются названному другому, второму крану, чтобы там отображаться на отображающем устройстве и/или применяться блоком управления второго крана для управления по меньшей мере одним движущим устройством первого и/или второго крана для совершения взаимно согласованного движения.
15. Кран по п.14, при этом блок (13) управления крана имеет подчиненный режим эксплуатации, в котором блок (13) управления крана на основе переданных другим краном данных движения и/или позиции и/или статуса и/или на основе переданных другим краном управляющих команд активирует по меньшей мере одно движущее устройство таким образом, что кран следует крановым движениям названного другого, второго крана, в частности, синхронно.
16. Кран по одному из предыдущих пунктов, при этом движущее устройство имеет механизм перестановки стрелы для перестановки крановой стрелы, в частности механизм (5) вращения для вращения крановой стрелы вокруг вертикальной оси.
| FR3030469A1, 24.06.2016 | |||
| DE102015010726A1, 23.02.2017 | |||
| FR2876992A1, 28.04.2006. |

