Изобретение относится к технике обеспечения безопасности работы башенных кранов.
Известны способы управления и защиты от столкновений работающих в группе башенных кранов, включающие обмен информацией между устройствами управления и защиты, установленными на каждом из "n" работающих в группе башенных кранов, о положении, движениях и нагрузке его оборудования, реализованные, например, в антиколлизийных системах "SMIE-AC30" (Франция). Система "SMIE-AC30" содержит установленное на каждом кране устройство управления и защиты крана, включающее в себя первую группу датчиков контроля параметров оборудования крана и цифровой вычислитель - центральный процессор, к первому входу которого подключены указанные датчики, к первому выходу - дисплей, а ко второму выходу - исполнительный блок. Процессоры связаны между собой кабелем или радиосвязью, образуя совместную коммуникативную сеть для обмена информацией о положении, движениях и нагрузке оборудования кранов (см. Дана Рафчикова. Антиколлизионные системы "SMIE-AC30" защиты кранов. Журнал "Подъемные сооружения. Специальная техника". 2001. №4). В системе «SMIE-AC30» положение крана и его оборудования известны, так как кран «привязан» к определенным точкам стройплощадки. Контролируя скорость перемещения крана и его оборудования и нагрузку крана (вес груза), компьютер вычисляет, какое конечное положение займет оборудование (стрела или тележка с грузовым крюком), если в данный момент будет начато торможение в оптимальном режиме. Устройство на другом кране производит подобные вычисления для своего крана и оба устройства обмениваются результатами вычислений. Когда расчеты систем свидетельствуют об опасном сближении оборудования кранов, начинается автоматическая остановка кранов каждым устройством. При этом на дисплеях устройств управления и защиты кранов (далее - дисплеях кранов) указываются направления опасных движений и пути безопасного вывода кранов из перекрываемых зон. Таким образом, данная система не блокирует доступ кранов в перекрываемые зоны, разрешает одновременную работу кранов путем последовательного (по мере надобности) снижения их скоростей, не допуская их столкновений. Однако недостатком этой системы является то, что остановка кранов происходит только при опасном сближении оборудования башенных кранов, что в ряде случаев вызывает необходимость обходных или возвратных движений, т.е. снижение производительности и энергетические потери.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа управления и защиты от столкновений работающих в группе башенных кранов, который обеспечивал бы повышенную безопасность и эффективность работы башенных кранов за счет создания информационных сигналов, предваряющих начало движения или ограничивающих движение оборудования кранов в случае возможного пересечения их траекторий.
Поставленная техническая задача достигается тем, что в известном способе управления и защиты от столкновений работающих в группе башенных кранов, включающем обмен информацией между устройствами управления и защиты, установленными на каждом из "n" работающих в группе башенных кранов, о положении, движениях и нагрузке его оборудования, согласно изобретению дополнительно определяют положение каждого крана и его оборудования на плане стройплощадки, формируют на дисплее устройства управления и защиты крана условное графическое изображение положения самого крана и его оборудования на плане стройплощадки и условное графическое изображение положения "смежного" или "смежных" кранов и его или их оборудования, при инициировании крановщиком перемещения оборудования крана Кi определяют предполагаемую траекторию движения оборудования данного крана и формируют на его дисплее графические изображения предполагаемых траекторий движения оборудования крана Ki и "смежного" или "смежных" кранов с перемещающимся в данный момент оборудованием путем обмена информацией между их устройствами управления и защиты, определяют минимальное расстояние между этими траекториями, при пересечении траекторий отображают на дисплее крана Ki точку пересечения и формируют сигнал блокировки работы механизмов этого крана, а также сигналы для тревожной световой и звуковой сигнализации, для продолжения движения оборудования крана Кi по командам крановщика дополнительно формируют линию, ограничивающую движение оборудования данного крана, и отображают ее на дисплее крана Кi, а при наличии ошибки при формировании ограничительной линии автоматически блокируют работу механизмов крана Кi в точке пересечения указанных траекторий.
Кроме того, при формировании ограничительной линии учитывают инерцию перемещаемого оборудования.
Применительно к системе, реализующей заявленный способ управления и защиты от столкновений работающих в группе башенных кранов, поставленная техническая задача достигается тем, что в известной системе, содержащей установленное на каждом кране устройство управления и защиты крана, включающее в себя первую группу датчиков контроля параметров оборудования крана и цифровой вычислитель, к первому входу которого подключены указанные датчики, к первому выходу - дисплей, а ко второму выходу - исполнительный блок, при этом цифровые вычислители связаны между собой линией последовательного интерфейса для обмена информацией о положении, движениях и нагрузке оборудования кранов, согласно изобретению каждое устройство управления и защиты крана снабжено второй группой датчиков, установленных на органах управления движением механизмов и подключенных ко второму входу цифрового вычислителя, и клавиатурой для задания режима работы крана, подключенной к третьему входу цифрового вычислителя, а каждый цифровой вычислитель выполнен с возможностью определения положения каждого крана и его оборудования на плане стройплощадки, формирования на дисплее крана условного графического изображения положения самого крана и его оборудования на плане стройплощадки и условного графического изображения положения "смежного" или "смежных" кранов и его или их оборудования на плане стройплощадки, определения при инициировании перемещения оборудования крана Кi предполагаемой траектории движения оборудования данного крана и формирования на его дисплее графического изображения предполагаемых траекторий движения оборудования крана Кi и "смежного" или "смежных" кранов с перемещающимся в данный момент оборудованием, определения минимального расстояния между этими траекториями, отображения на дисплее крана Кi точки пересечения траекторий и формирования при этом сигнала блокировки работы механизмов этого крана и сигналов для тревожной световой и звуковой сигнализации, формирования линии, ограничивающей движение оборудования крана Кi при необходимости продолжения движения его оборудования и отображения этой линии на дисплее данного крана, и автоматической блокировки работы крана Кi в точке пересечения указанных траекторий при наличии ошибки при формировании ограничительной линии.
Цифровой вычислитель каждого устройства управления и защиты крана может включать в себя блок определения нагрузки и положения оборудования крана, блок определения скорости движения оборудования крана, блок определения траектории движения оборудования крана, блок определения минимального расстояния между точками траекторий движения оборудования кранов, блок совпадений, блок формирования индикации, блок задания ограничительных линий, линию задержки и блок усилителей, при этом выход блока определения нагрузки и положения оборудования крана подключен через последовательно соединенные блок определения скорости движения оборудования крана и блок определения траектории движения к первым входам блока формирования индикации, блока определения минимального расстояния между точками траекторий движения оборудования кранов и блока совпадений, выход блока задания ограничительных линий подключен к вторым входам блока определения траектории движения оборудования крана и блока совпадений, третий вход которого подключен к выходу блока определения минимального расстояния между точками траекторий движения оборудования кранов, а выход через линию задержки - к входу блока усилителей, первым входом цифрового вычислителя является вход блока определения нагрузки и положения оборудования крана, вторым входом - объединенные третий вход блока формирования индикации и четвертый вход блока совпадений, а третьим входом - вход блока задания ограничительных линий, входом/выходом цифрового вычислителя являются объединенные вторые входы блока определения минимального расстояния между точками траекторий движения оборудования кранов и блока формирования индикации, а первым и вторым выходами цифрового вычислителя являются соответственно выходы блока формирования индикации и блока усилителей.
Технический результат от использования изобретения - повышение безопасности работы на одной стройплощадке группы башенных кранов и повышение эффективности их работы за счет исключения обходных или возвратных движений при пересечении траекторий перемещения оборудования "смежных" кранов.
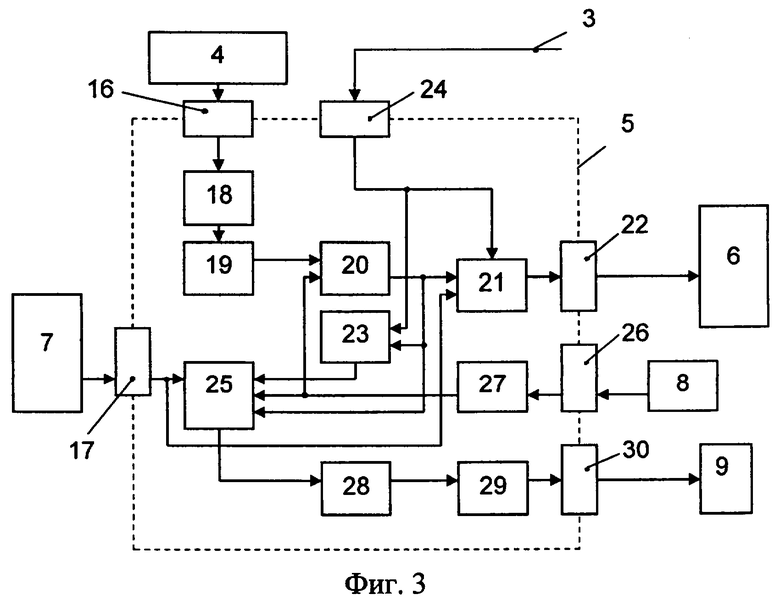
На фиг.1 показаны фрагменты изображений на дисплее одного из двух "смежных" башенных кранов при различных перемещениях оборудования кранов; на фиг.2 - структурная схема системы, реализующей предлагаемый способ управления и защиты от столкновений работающих в группе башенных кранов; на фиг.3 - функциональная схема устройства управления и защиты крана.
На фиг.2 и 3 приведены следующие обозначения:
1 - устройство управления и защиты первого крана;
2 - устройство управления и защиты второго крана;
3 - линия последовательного интерфейса;
4 - первая группа датчиков контроля параметров оборудования первого крана;
5 - цифровой вычислитель;
6 - дисплей;
7 - вторая группа датчиков контроля положения органов управления первого крана;
8 - клавиатура для задания режима работы первого крана;
9 - исполнительный блок;
10 - первая группа датчиков контроля параметров оборудования второго крана;
11 - цифровой вычислитель;
12 - дисплей;
13 - вторая группа датчиков контроля положения органов управления второго крана;
14 - клавиатура для задания режима работы второго крана;
15 - исполнительный блок;
16 - первый вход цифрового вычислителя;
17 - второй вход цифрового вычислителя;
18 - блок определения нагрузки и положения оборудования крана;
19 - блок определения скорости движения оборудования крана;
20 - блок определения траектории движения оборудования крана;
21 - блок формирования индикации;
22 - первый выход цифрового вычислителя;
23 - блок определения минимального расстояния между точками траекторий движения оборудования кранов;
24 - вход/выход цифрового вычислителя;
25 - блок совпадений;
26 - третий вход цифрового вычислителя;
27 - блок задания ограничительный линий;
28 - линия задержки;
30 - второй выход цифрового вычислителя.
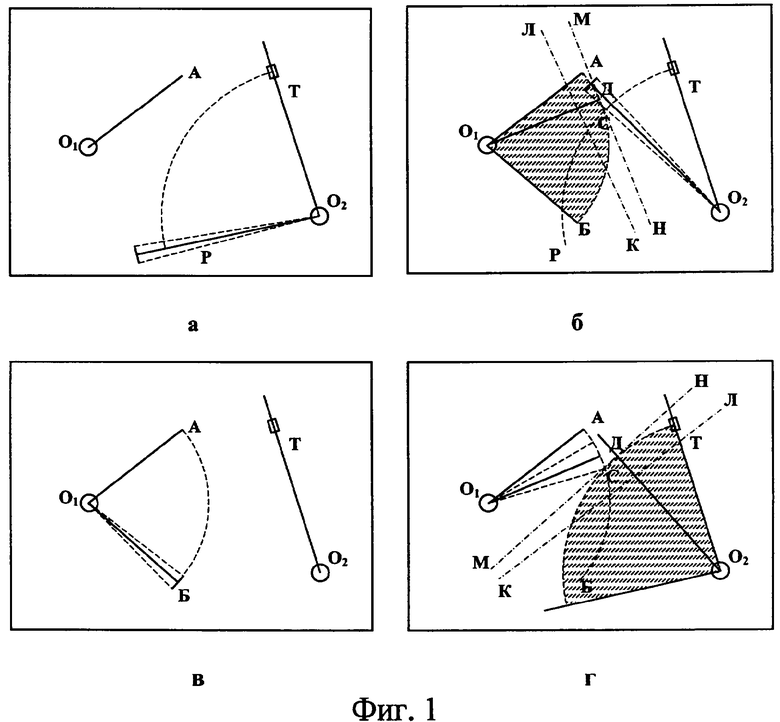
Фрагменты изображений, в частности, на дисплее крана К2, представленные на фиг.1, выполнены в предположении, что кран K1 с центром O1 вращения его стрелы ниже крана К2 с центром О2 вращения его стрелы, т.е. возможно соприкосновение троса, сбегающего с тележки Т крана К2, с любой точкой стрелы O1A крана K1.
Предлагаемый способ обеспечивает возможность управления и защиты кранов K1 и К2, работающих в следующих режимах:
а) инициирование и начало движения оборудования крана К2 по траектории ТР при неподвижном оборудовании крана K1;
б) инициирование и начало движения оборудования крана К2 по траектории ТР при движущемся оборудовании крана K1;
в) инициирование и начало движения оборудования крана K1 по траектории АБ при неподвижном оборудовании крана К2;
г) инициирование и начало движения оборудования крана K1 по траектории АБ при движущемся оборудовании крана К2.
Заштрихованные зоны изображают на дисплее возможные положения оборудования крана, т.е. зоны, в которые не должен попадать "смежный" кран при перемещении его оборудования. Пунктиром около проекции стрелы крана обозначен допуск на погрешность остановки стрелы крана, рассчитанный по параметрам движения (инерции) оборудования. На фиг.1 приведены примеры простых движений (поворот стрелы крана), хотя при совмещении движений (например, поворот стрелы крана и перемещение крана по пути, поворот стрелы крана и перемещение тележки) на дисплее изображается траектория общего более сложного движения.
Предлагаемый способ осуществляется следующим образом.
По сигналам датчиков, установленных на оборудовании двух "смежных" кранов K1 и К2, определяют положение кранов, их оборудования на плане стройплощадки и нагрузку оборудования. Формируют на дисплее крана К1 условное графическое изображение положения самого крана K1 на плане стройплощадки в виде точки O1 и положение его стрелы в виде линии O1A, а также условное графическое изображение положения "смежного" крана К2 в виде точки О2 и его оборудования - стрелы с тележкой Т в виде линии O2T путем обмена информацией между устройствами управления и защиты, установленными на кранах K1 и К2, о положении, движениях и нагрузке их оборудования. Аналогичные изображения формируют на дисплее крана К2.
При инициировании крановщиком перемещения оборудования крана К2 (поворота его стрелы с неподвижной тележкой Т) посредством перемещения соответствующего органа управления определяют предполагаемую траекторию перемещения стрелой крана К2 его тележки и формируют на его дисплее графическое изображение предполагаемой траектории движения оборудования крана К2 (пунктирная линия ТР) и положение стрелы "смежного" крана K1 путем обмена информацией между их устройствами управления и защиты.
Если стрела крана K1 неподвижна и траектория движения оборудования крана К2 не пересекает проекцию стрелы крана K1 (линия O1A на фиг.1.а), то через установленную выдержку времени подают сигнал на включение механизма поворота стрелы крана К2 до требуемой позиции (точка Р). Если кран K1 работает и стрела поворачивается, то дополнительно формируют на дисплее крана К2 условное графическое изображение траектории перемещения крюка стрелы крана K1 на плане стройплощадки и определяют минимальное расстояние между этими траекториями. При пересечении траекторий отображают на дисплее крана К2 точку пересечения (точка "С" на фиг.1.б) и формируют сигнал блокировки работы механизмов крана К2, а также сигналы для тревожной световой и звуковой сигнализации.
Для продолжения поворота стрелы крана К2 по командам крановщика дополнительно формируют линию МН, ограничивающую движение оборудования данного крана с учетом инерции перемещаемого оборудования, и отображают ее на дисплее крана К2, а при наличии ошибки при формировании ограничительной линии, например, линии КЛ, автоматически блокируют работу механизмов крана K2 в точке "С" пересечения указанных траекторий. Такой вариант работы для минимизации затрат времени и энергозатрат возможен вследствие того, что на дисплее крана К2 отображается зона возможного перемещения стрелы крана K1 (фиг.1.б), но стрела крана может остановиться, например, на линии О1Д, не мешая перемещению стрелы крана К2.
Аналогично происходит начало движения крана K1.
При инициировании крановщиком перемещения оборудования крана K1 (поворота его стрелы) посредством перемещения соответствующего органа управления определяют предполагаемую траекторию перемещения крюка крана K1 и формируют на его дисплее графическое изображение предполагаемой траектории движения крюка крана K1 (пунктирная линия АБ на фиг.1.в) и положение стрелы с тележкой "смежного" крана К2 путем обмена информацией между их устройствами управления и защиты.
Если стрела крана К2 неподвижна и траектория движения оборудования крана K1 не пересекает проекцию стрелы крана К2 (линию О2Т на фиг.1.в), то через установленную выдержку времени подают сигнал на включение механизма поворота стрелы крана K1 до требуемой позиции (точка Б). Если кран К2 работает (стрела поворачивается), то дополнительно формируют на дисплее крана K1 условное графическое изображение траектории перемещения крюка крана К2 на плане стройплощадки и определяют минимальное расстояние между этими траекториями. При пересечении траекторий отображают на дисплее крана K1 точку пересечения (точка "С" на фиг.1.г) и формируют сигнал блокировки работы механизмов крана K1, а также сигналы для тревожной световой и звуковой сигнализации.
Для продолжения поворота стрелы крана K1 по командам крановщика дополнительно формируют линию MH, ограничивающую движение оборудования данного крана, с учетом инерции перемещаемого оборудования и отображают ее на дисплее крана K1, а при наличии ошибки при формировании ограничительной линии, например, линии КЛ, автоматически блокируют работу механизмов крана K1 в точке "С" пересечения указанных траекторий. Такой вариант работы для минимизации затрат времени и энергозатрат возможен вследствие того, что на дисплее крана K1 отображается зона возможного перемещения стрелы крана К2 (фиг.1.г), но стрела крана может остановиться, например, на линии О2Д, не мешая перемещению стрелы крана K1.
Система управления и защиты от столкновений работающих в группе башенных кранов содержит устройство 1 управления и защиты первого крана K1 и устройство 2 управления и защиты второго крана К2. Устройства 1 и 2 связаны между собой линией 3 последовательного интерфейса. Технически связь между устройствами может осуществляться по кабелю или по радиоканалу.
Устройство 1 управления и защиты первого крана содержит первую группу 4 датчиков контроля параметров оборудования первого крана, подключенных к первому входу 16 цифрового вычислителя 5. К первому выходу 22 цифрового вычислителя 5 подключен дисплей 6, а к второму выходу 30 - исполнительный блок 9. К второму входу 17 цифрового вычислителя 5 подключена вторая группа 7 датчиков контроля положения органов управления первого крана (рычагов, кнопок, джойстиков и т.п.), а к третьему входу 26 - клавиатура 8 для задания режима работы первого крана. Цифровой вычислитель 7 имеет вход/выход 24 для подключения линии 3 последовательного интерфейса для обмена информацией с вторым устройством управления и защиты "смежного" крана К2 или с другими устройствами управления и защиты "смежных" кранов.
Соответственно, устройство 2 управления и защиты второго крана К2 содержит первую группу 10 датчиков контроля параметров оборудования второго крана, цифровой вычислитель 11, дисплей 12, вторую группу 13 датчиков контроля положения органов управления второго крана, клавиатуру 14 для задания режима работы второго крана и исполнительный блок 15. Цифровой вычислитель 11 имеет вход/выход для подключения линии 3 последовательного интерфейса для обмена информацией с первым устройством или другими устройствами управления и защиты "смежных" кранов.
Датчики контроля параметров оборудования крана и цифровые вычислители обеспечивают функционирование устройств безопасности каждого крана, защищая их от перегрузки и недопустимых перемещений оборудования.
Датчики контроля положения органов управления и образованные в цифровых вычислителях программные функциональные блоки обеспечивают функционирование устройств безопасности каждого крана, защищая последние от недопустимых взаимных перемещений кранов и их оборудования.
Цифровой вычислитель 5 устройства управления и защиты крана включает в себя блок 18 определения нагрузки и положения оборудования крана, блок 19 определения скорости движения оборудования крана, блок 20 определения траектории движения оборудования крана, блок 21 формирования индикации, блок 23 определения минимального расстояния между точками траекторий движения оборудования кранов, блок 25 совпадений, блок 27 задания ограничительных линий, линию 28 задержки и блок 29 усилителей.
Выход блока 18 определения нагрузки и положения оборудования крана подключен через последовательно соединенные блок 19 определения скорости движения оборудования крана и блок 20 определения траектории движения оборудования крана к первым входам блока 21 формирования индикации, блока 23 определения минимального расстояния между точками траекторий движения оборудования кранов и блока 25 совпадений.
Выход блока 27 задания ограничительных линий подключен к вторым входам блока 20 определения траектории движения оборудования крана и блока 25 совпадений, третий вход которого подключен к выходу блока 23 определения минимального расстояния между точками траекторий движения оборудования кранов, а выход через линию 28 задержки - к входу блока 29 усилителей.
Первым входом 16 цифрового вычислителя 5 является вход блока 18 определения нагрузки и положения оборудования крана, вторым входом 17 - объединенные третий вход блока 21 формирования индикации и четвертый вход блока 25 совпадений, а третьим входом 26 - вход блока 27 задания ограничительных линий.
Входом/выходом 24 вычислителя 5 являются объединенные вторые входы блока 23 определения минимального расстояния между точками траекторий движения оборудования кранов и блока 21 формирования индикации.
Первым выходом 22 вычислителя 5 является выход блока 21 формирования индикации 22, вторым выходом 30 - выход блока 29 усилителей.
Цифровой вычислитель 11 выполнен аналогично цифровому вычислителю 5. Входы/выходы 24 вычислителей 5 и 11 соединены между собой линией 3 последовательного интерфейса.
В предлагаемой системе блоки выполнены следующим образом.
Первая группа 4 (10) датчиков контроля параметров оборудования крана содержит первичные преобразователи физического параметра (усилия, давления, угловых и линейных перемещений и т.п.) в электрический сигнал (аналоговый, дискретный, цифровой). Число датчиков зависит от состава оборудования крана.
Вторая группа 7 (13) датчиков содержит первичные преобразователи для контроля положения органов управления крана. Их число и тип зависят от состава органов управления и требований контроля:
- для контроля инициирования движения они могут быть дискретными;
- для контроля задаваемой скорости движения - с пропорциональным выходным сигналом.
Цифровые вычислители 5 и 11 представляют собой PIC-процессоры со стандартным набором элементов, включая АЦП, мультиплексор, ОЗУ, ППЗУ, параллельными и последовательным портами и т.д. Он снабжен усилителями для подключения исполнительных устройств.
Дисплеи 6 и 12 представляют собой стандартный набор блоков для цифро-буквенного и графического отображения информации.
Клавиатуры 8 и 14 представляют собой набор клавиш или переключателей, обеспечивающий выбор и задание режима работы устройства управления и защиты крана.
Блоки 18-21, 23, 25-28 представляют собой программные функциональные устройства, образованные в цифровом вычислителе 5 (или соответственно в цифровом вычислителе 11) математическим обеспечением.
Система работает следующим образом.
При первоначальной установке системы производится ее настройка на кране (прежде всего датчиков и узлов их установки) с целью ее «привязки» к стройплощадке.
Далее во время работы каждое из устройств 1 и 2 управления и защиты крана работают аналогично друг другу. В устройстве 1 сигналы датчиков контроля параметров оборудования первого крана K1 поступают на первый вход 16 цифрового вычислителя 5, где блоком 18 определяется положение оборудования первого крана и нагрузка на него с целью определения инерции движения. Изменение положения оборудования, фиксируемое блоком 18, преобразуется блоком 19 определения скорости движения оборудования в величину и направление пути движения, которые затем блоком 20 преобразуются в траекторию движения.
Блок 21 формирует сигналы для индикации характера движения крана K1, на котором установлено устройство 1. Он же по сигналам, сформированным в устройстве 2 и переданным по линии 3 через вход/выход 24, формирует сигналы для индикации характера движения второго "смежного" крана К2, на котором установлено устройство 2. Сигналы блока 21 через первый выход 22 цифрового вычислителя 5 передаются на дисплей 6.
При этом информация на устройствах 1 и 2 индицируется в виде проекций стрелы (фиг.1.а и фиг.1.в), если краны неподвижны. При движении "смежного" крана К2 область возможных положений его оборудования изображается, например, в устройстве 1 в виде зоны (фиг.1.б), а предполагаемое движение "собственного" крана K1, на котором установлен конкретный дисплей 6, изображается в виде направления. Изображение направления возникает по сигналу от датчиков 7, поступающих по второму входу 17 на блок 21.
Крановщик посредством клавиатуры 8 через третий вход 26 цифрового вычислителя 5 производит блоком 27 задание ограничительных линий допустимых перемещений оборудования, фиксируя их в блоках 20, 21 и на дисплее 6. До установки ограничительных линий блок 27 воздействует на блок 25 совпадений и запрещает прохождение сигналов датчиков 7, инициирующих движение оборудования по цепи: линия 28 задержки (служит для обеспечения времени формирования информации на дисплее), блок 29 усилителей, второй выход 30 вычислителя 5, исполнительный блок 9.
Данный режим соответствует состоянию предварительной индикации и принятия крановщиком решения о траектории перемещения оборудования крана. После установки ограничительных линий блок 27 снимает запрет с блока 25 совпадений на прохождение сигналов датчиков 7, которые через блок 29 усилителей воздействуют на исполнительный блок 9. Оборудование крана начнет перемещаться до момента совпадения сигналов блока 20 вычисления траектории движения и блока 27 задания ограничительных линий, в результате чего блок 25 создаст сигнал на остановку движения.
Во время движения оборудования кранов на блок 23 поступает информация о движении оборудования каждого крана ("собственного" от блока 20 и "смежного" по входу/выходу 24). Блок 23 вычислит минимальное расстояние между точками траекторий движения оборудования кранов и при недопустимом сближении оборудования, например при неверном задании ограничительных линий, создаст сигнал в блок 25 на отключение механизмов "собственного" крана K1. Такое же воздействие будет иметь место и в устройстве 2 на отключение механизмов "смежного" крана К2.
Предлагаемая система управления и защиты от столкновений работающих в группе башенных кранов может быть изготовлена промышленным способом на приборостроительном предприятии с использованием современных электронных компонентов и технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНЫХ КРАНОВ ОТ СТОЛКНОВЕНИЙ | 2009 |
|
RU2398728C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325317C1 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| СИСТЕМА БЕЗОПАСНОСТИ СТРОИТЕЛЬНЫХ МАШИН (ВАРИАНТЫ) | 2010 |
|
RU2452683C2 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СИМУЛЯТОР ПОДЪЕМНОГО КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ ВИЛОЧНОГО ПОГРУЗЧИКА | 2017 |
|
RU2730697C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙ ПРИ РАБОТЕ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2306255C1 |
Группа изобретений относится к технике обеспечения безопасности работы башенных кранов. Способ включает обмен информацией между устройствами управления и защиты, установленными на каждом из "n" работающих в группе башенных кранов, о положении, движениях и нагрузке его оборудования. Дополнительно определяют положение каждого крана и его оборудования на плане стройплощадки, формируют на дисплее крана условное графическое изображение положения самого крана и его оборудования на плане стройплощадки и условное графическое изображение положения "смежного" или "смежных" кранов и его или их оборудования. При инициировании крановщиком перемещения оборудования крана Ki определяют предполагаемую траекторию движения оборудования данного крана и формируют на его дисплее графические изображения предполагаемых траекторий движения оборудования крана Кi и "смежного" или "смежных" кранов с перемещающимся в данный момент оборудованием путем обмена информацией между их устройствами управления и защиты, определяют минимальное расстояние между этими траекториями, при пересечении траекторий отображают на дисплее крана Ki точку пересечения и формируют сигнал блокировки работы механизмов этого крана, а также сигналы для тревожной световой и звуковой сигнализации. Для продолжения движения оборудования крана Кi по командам крановщика дополнительно формируют линию, ограничивающую движение оборудования данного крана, и отображают ее на дисплее крана Кi, а при наличии ошибки при формировании ограничительной линии автоматически блокируют работу механизмов крана Кi в точке пересечения указанных траекторий. Техническим результатом изобретения является повышение безопасности работы грузоподъемного крана. 2 н. и 2 з.п. ф-лы, 3 ил.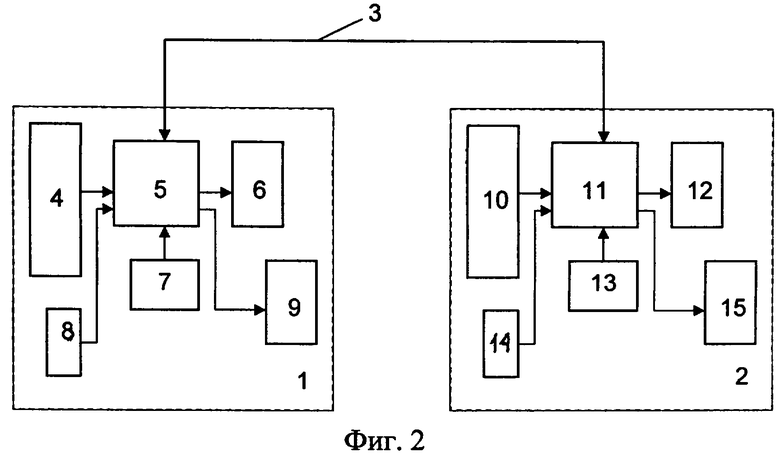
| КРАНОВОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1989 |
|
RU2093452C1 |
| US 2005192732 A1, 01.09.2005 | |||
| JP 9167042 A, 24.06.1997 | |||
| Способ изолирования проводников | 1936 |
|
SU51606A1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО ГОРЕНИЯ С КРИВОЛИНЕЙНО-ПАЗОВЫМ МЕХАНИЗМОМ | 1934 |
|
SU47868A1 |

