Изобретение относится к области электротехники и может быть использовано в системах векторного управления синхронным электродвигателем с постоянными магнитами без применения датчиков для измерения угла поворота ротора двигателя.
Известен способ управления синхронным электродвигателем (Патент США №10291160, МПК Н02Р 6/06, дата приоритета 09.03.2018, дата публикации 14.05.2019), в котором раскрыта модель наблюдателя угла поворота и скорости вращения ротора, использующая измерения только сил токов и напряжений фаз статора. При этом угол поворота ротора определяют исходя из рассчитанной оценки скорости и ошибки оценки, генерируемой наблюдателем сила тока по продольной оси в подвижной системе координат, связанной с ротором.
Недостаток данного способа заключается в том, что для определения угла поворота ротора используются формулы верные только для постоянной скорости вращения ротора, что ведет к появлению ошибки определения угла поворота ротора при изменении скорости и существенно сужает область применения указанного способа.
Известен способ бездатчикового управления неявнополюсным синхронным двигателем с постоянными магнитами (D. Shah, G. Espinosa- R. Ortega, Μ. Hilairet, An asymptotically stable sensorless speed controller for non-salient permanent magnet synchronous motors, International Journal of Robust and Nonlinear Control, Vol.24, Iss. 4, pp. 644-668, March 2014), в котором раскрыт алгоритм оценивания угла поворота ротора, сущность которого заключается в том, что для оценивания угла поворота ротора используют оценки тригонометрических функций, зависящих от угла поворота ротора, которые рассчитывают на основе оценки общего магнитного потока, определяемой по измерениям сил тока и напряжений фаз статора.
R. Ortega, Μ. Hilairet, An asymptotically stable sensorless speed controller for non-salient permanent magnet synchronous motors, International Journal of Robust and Nonlinear Control, Vol.24, Iss. 4, pp. 644-668, March 2014), в котором раскрыт алгоритм оценивания угла поворота ротора, сущность которого заключается в том, что для оценивания угла поворота ротора используют оценки тригонометрических функций, зависящих от угла поворота ротора, которые рассчитывают на основе оценки общего магнитного потока, определяемой по измерениям сил тока и напряжений фаз статора.
Недостаток данного способа заключается в том, что он не обеспечивает оценивания угла поворота ротора при изменяющемся во времени нагрузочном крутящем моменте, приложенному к двигателю. Также для оценивания угла поворота необходимо, чтобы ряд параметров двигателя был точно известным, в частности, момент инерции двигателя и постоянный магнитный поток, создаваемый постоянными магнитами ротора. Указанные недостатки сужают область применения способа и затрудняют его применение на практике.
В качестве ближайшего аналога выбран способ нелинейного робастного определения угла поворота ротора для синхронного двигателя с постоянными магнитами (А.А. Bobtsov, А.А. Pyrkin, R. Ortega, S.N. Vukosavic, A.M. Stankovic, E.V. Panteley, A robust globally convergent position observer for the permanent magnet synchronous motor, Automatica, Vol. 61, pp. 47-54, November 2015), заключающийся в измерении мгновенных значений силы тока в фазах статора ia(t), ib(t), ic(t), мгновенных значений напряжений на фазах статора ua(t), ub(t), uc(t), расчета мгновенных значений силы тока i(t) и напряжения it(t) в двухфазной стационарной системе координат αβ, связанной со статором, с помощью преобразования Кларк и определении угла поворота ротора  по формуле, с учетом номинальных или измеренных параметров двигателя и выбранных настраиваемых параметров:
по формуле, с учетом номинальных или измеренных параметров двигателя и выбранных настраиваемых параметров:
где k - количество пар полюсов, χα(t) и χβ(t) - компоненты оценки потокосцепления  создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором, определяют с использованием векторной версии градиентного спуска.
создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором, определяют с использованием векторной версии градиентного спуска.
К недостаткам данного ближайшего аналога следует отнести низкое быстродействие из-за использования при расчете угла поворота ротора векторной версии алгоритма градиентного спуска, которая имеет существенные ограничения для повышения скорости оценивания.
Решается задача повышения быстродействия определения углового положения ротора по измерениям мгновенных значений силы тока в фазах статора ia(t), ib(t), ic(t) и мгновенных значений напряжений на фазах статора ua(t), ub(t), uc(t).
Поставленная задача решается тем, что в способе определения угла поворота ротора синхронного электродвигателя с постоянными магнитами  заключающегося в измерении мгновенных значений силы тока в фазах статора ia(t), ib(t), ic(t), мгновенных значений напряжений на фазах статора ua(t), ub(t), uc(t), расчета мгновенных значений силы тока i(t) и напряжения u(t) в двухфазной стационарной системе координат αβ, связанной со статором, с помощью преобразования Кларк:
заключающегося в измерении мгновенных значений силы тока в фазах статора ia(t), ib(t), ic(t), мгновенных значений напряжений на фазах статора ua(t), ub(t), uc(t), расчета мгновенных значений силы тока i(t) и напряжения u(t) в двухфазной стационарной системе координат αβ, связанной со статором, с помощью преобразования Кларк:

угол поворота ротора  определяют, с учетом номинальных или измеренных значений сопротивления R и индуктивности L обмоток статора, а также выбранных настраиваемых параметров, по формуле:
определяют, с учетом номинальных или измеренных значений сопротивления R и индуктивности L обмоток статора, а также выбранных настраиваемых параметров, по формуле:
где k - количество пар полюсов, χα(t) и χβ(t) - компоненты оценки потокосцепления  создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором, новым является то, что для формирования сигналов вектора оценки потокосцепления магнитов ротора χα(t) и χβ(t) сигналы токов i(t) и напряжений u(t) в системе координат αβ передают в блоки фильтрации с различными параметрами ξn>0, n принимает значения 1 и 2, которые реализуют по формулам:
создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором, новым является то, что для формирования сигналов вектора оценки потокосцепления магнитов ротора χα(t) и χβ(t) сигналы токов i(t) и напряжений u(t) в системе координат αβ передают в блоки фильтрации с различными параметрами ξn>0, n принимает значения 1 и 2, которые реализуют по формулам:
далее фильтрованные сигналы токов и напряжений iƒ(t, ξn), id(t, ξn), uƒ(t, ξn), ud(t, ξn) и сигналы i(t), u(t) передают в блок вычисления сигналов расширенной модели, где при различных параметрах ξn формируют сигналы компонент расширенной регрессионной модели ϕ(t, ξn) и c(t, ξn) по формулам:


их объединяют в блоках объединения сигналов расширенной регрессионной модели по правилу:
и формируют сигналы скалярных моделей в блоке вычисления сигналов скалярных моделей по формулам:
Δ(t)=det{Ф(t)},
Y(t)=adj{Ф(t)}C(t),
det{Ф(t)}, adj{Ф(t)} - определитель и союзная матрица от матрицы Φ(t), полученные сигналы и сигналы тока i(t) и напряжения u(t) в стационарной системе координат αβ передают в блок оценивания магнитного потока, где формируют сигнал оценки суммарного потокосцепления λ(t) по закону:

γ>0 - настраиваемый коэффициент усиления, одновременно сигнал i(t) усиливают в L раз и вычитают в сумматоре из сигнала оценки суммарного потокосцепления λ(t), в результате чего получают сигнал вектора оценки потокосцепления магнитов ротора χ(t).
В предлагаемом способе угол поворота ротора рассчитывается на основе оценки потокосцепления постоянных магнитов ротора в двухфазной системе координат αβ, которая вычисляется как разность оценки суммарного потокосцепления λ(t) и оценки потокосцепления обмоток статора. Оценка λ(t) вычисляется с помощью адаптивного наблюдателя построенного на основе модели двигателя в стационарной двухфазной системе координат αβ с обратной связью, полученной на базе метода динамического расширения и смешивания регрессора (A. Pyrkin, A. Bobtsov, R. Ortega, A. Vedyakov, S. Aranovskiy, Adaptive state observers using dynamic regressor extension and mixing // Systems & Control Letters, V. 133., 2019), отличающегося повышенным быстродействием и состоящего из шага «расширения» двумерной регрессионной модели, путем формирования матриц C(t) и Ф(t) на основе фильтрованных сигналов с параметрами фильтрации ξ1 и ξ2, и «смешивания», заключающегося в расчете сигналов Y(t) и Δ(t), используемых для введения обратной связи по ошибке оценивания суммарного потокосцепления λ(t) в адаптивном наблюдателе.
Сущность предложенного способа поясняется чертежами, где:
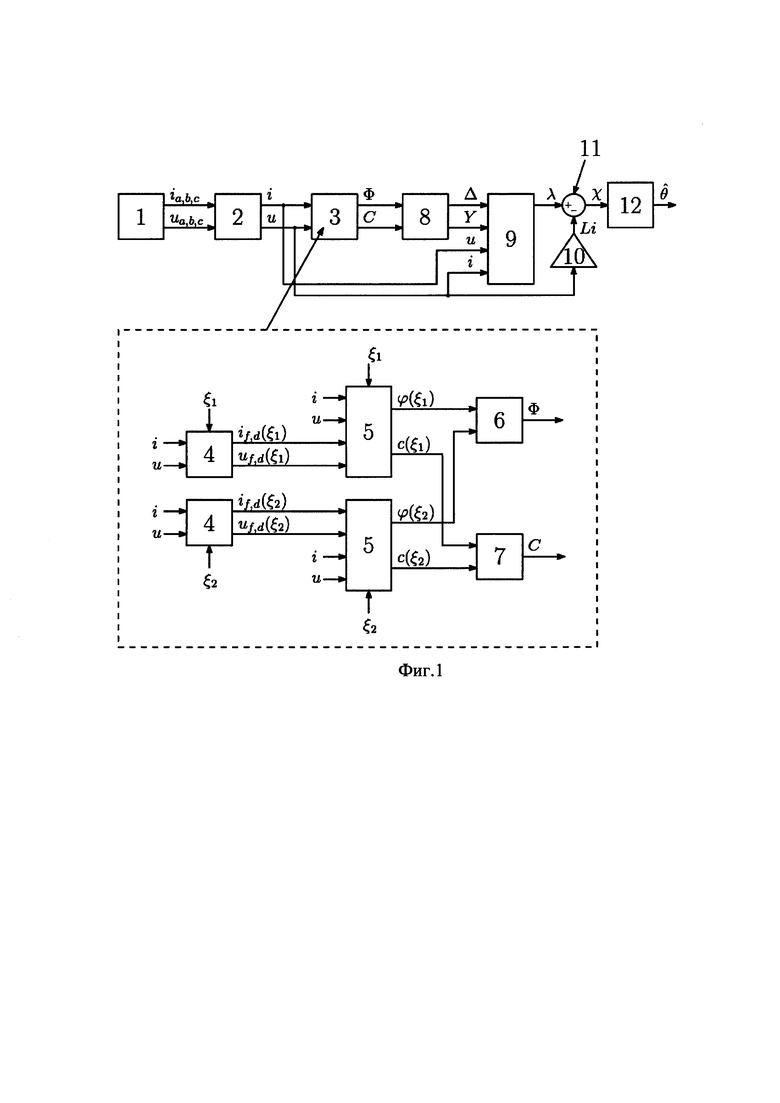
на фиг. 1 представлена схема работы устройства для определения угла поворота ротора синхронного двигателя с постоянными магнитами по измерениям мгновенных значений силы тока в фазах статора ia(t), ib(t), ic(t) и мгновенных значений напряжений на фазах статора ua(t), ub(t), uc(t),
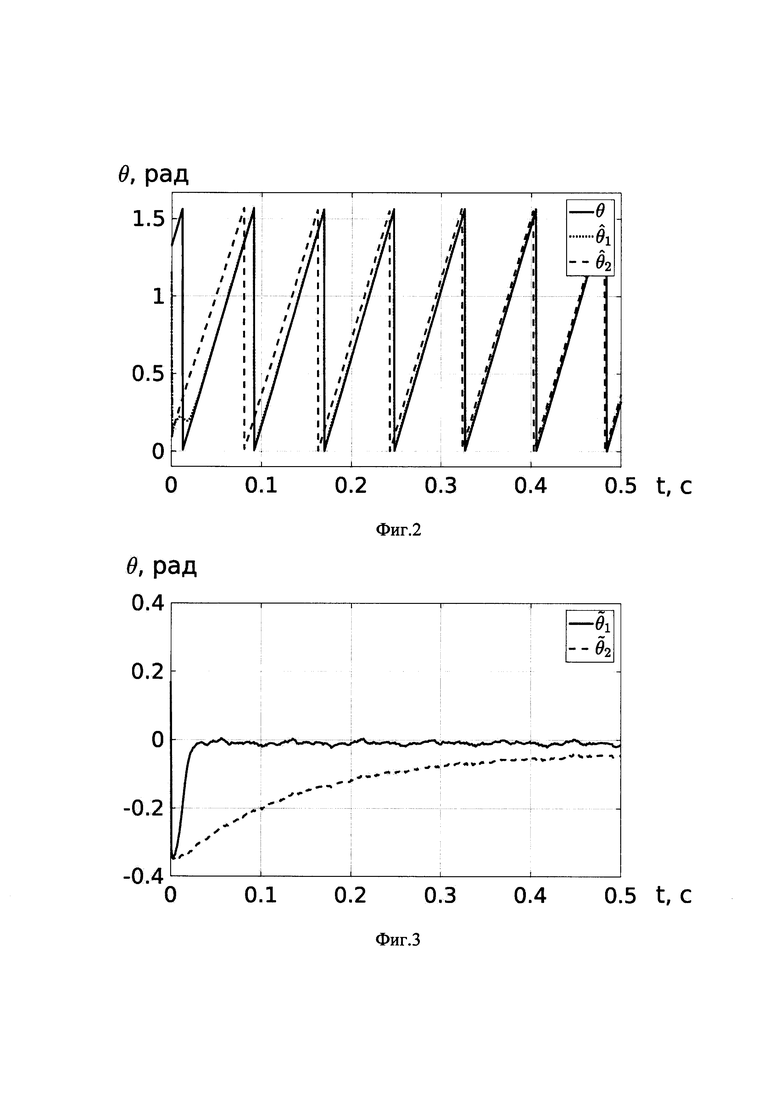
на фиг. 2 приведены графики оцененного угла поворота ротора синхронного двигателя с постоянными магнитами при использовании предложенного способа  - линия точечным пунктиром) и при использовании ближайшего аналога
- линия точечным пунктиром) и при использовании ближайшего аналога  - линия штриховым пунктиром), а также измеренного с помощью энкодера угла поворота ротора θ(t) -сплошная линия) при скорости вращения ротора 20 рад/с.
- линия штриховым пунктиром), а также измеренного с помощью энкодера угла поворота ротора θ(t) -сплошная линия) при скорости вращения ротора 20 рад/с.
на фиг. 3 приведены графики ошибок определения угла поворота ротора при использовании предложенного способа  - сплошная линия) и ближайшего аналога
- сплошная линия) и ближайшего аналога  - линия штриховым пунктиром) при скорости вращения ротора 20 рад/с,
- линия штриховым пунктиром) при скорости вращения ротора 20 рад/с,
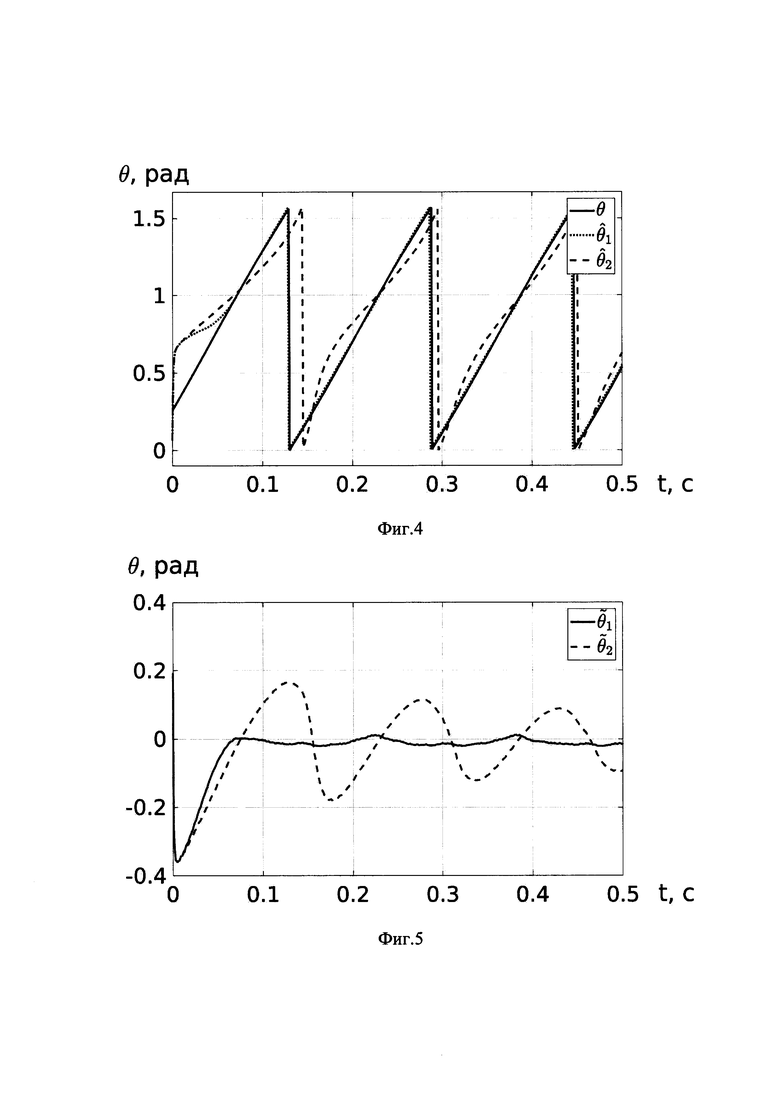
на фиг. 4 приведены графики оцененного угла поворота ротора заявленным способом  - линия точечным пунктиром) и ближайшим аналогом
- линия точечным пунктиром) и ближайшим аналогом  - линия штриховым пунктиром), а также измеренного угла поворота с помощью энкодера θ(t) - сплошная линия) при скорости вращения ротора 10 рад/с,
- линия штриховым пунктиром), а также измеренного угла поворота с помощью энкодера θ(t) - сплошная линия) при скорости вращения ротора 10 рад/с,
на фиг. 5 приведены графики ошибок определения угла поворота ротора при использовании предложенного способа  - сплошная линия) и ближайшего аналога
- сплошная линия) и ближайшего аналога  - линия штриховым пунктиром) при скорости вращения ротора 10 рад/с.
- линия штриховым пунктиром) при скорости вращения ротора 10 рад/с.
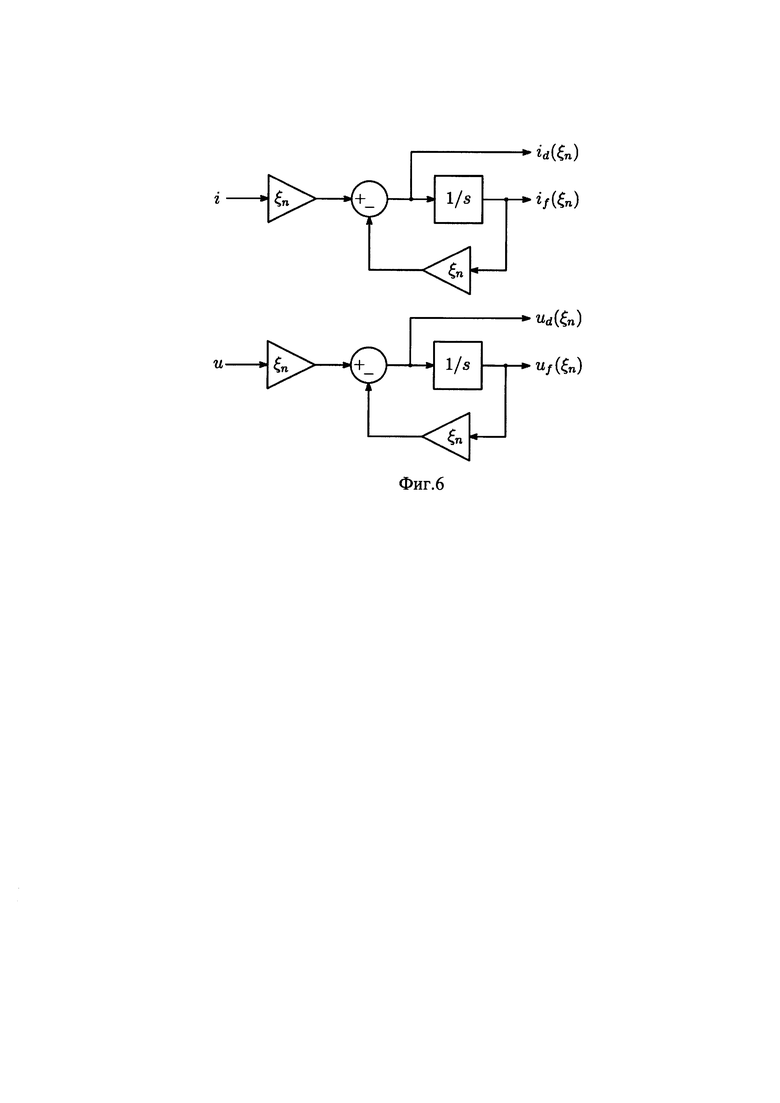
на фиг. 6 приведена схема блока фильтрации сигналов на усилителях, интеграторах и сумматорах.
По графикам на фиг. 2 и фиг. 4 видно, что при использовании предложенного способа график оценки положения  менее чем за 0.1 с сходится к значению угла поворота (линии практически совпадают), полученного с помощью энкодера, в том время как при использовании ближайшего аналога для этого требуется значительное время.
менее чем за 0.1 с сходится к значению угла поворота (линии практически совпадают), полученного с помощью энкодера, в том время как при использовании ближайшего аналога для этого требуется значительное время.
Устройство, реализующее предложенный способ и изображенное на фиг.1, содержит в себе: синхронный двигатель 1; блок измерителей (датчиков) силы тока и напряжения с преобразователем системы координат 2; блок фильтрации и вычислитель сигналов расширенной регрессионной модели 3; блок вычисления сигналов скалярных моделей 8; блок оценивания магнитного потока 9; усилитель 10; сумматор 11; блок оценивания угла поворота ротора 12. Блок фильтрации и вычислитель сигналов расширенной регрессионной модели содержит блоки фильтрации 4 (схема приведена на фиг.6); блоки вычисления сигналов расширенной регрессионной модели 5; блоки объединения сигналов расширенной регрессионной модели 6 и 7.
Выход синхронного двигателя 1 соединен с входом блока 2. Выход блока 2, несущий информацию о силе токов и напряжениях фаз статора в двухфазной стационарной системе координат, подключен к входам блоков 3, 4, 5, 9 и входу усилителя 10. В блоки 4 и 5 передаются значения параметров ξ1 и ξ2. Выходы блока 4 связаны со входами блока 5, чьи выходы подключены к блокам 6 и 7, которые передают сигналы расширенной регрессионной модели. Эти сигналы поступают в блок 8, его выходы связаны входами блока 9. Из блока 9 выходной сигнал поступает на сумматор 11, он также принимает сигнал из усилителя 10. Выход сумматора 11 связан со входом блока оценивания угла поворота ротора 12.
Устройство работает следующим образом: измеряют мгновенные значения сил токов ia(t), ib(t), ic(t) и напряжений ua(t), ub(t), uc(t) в фазах статора с помощью датчиков, их преобразуют в сигналы силы тока i(t) и напряжения u(t) в двухфазной стационарной системе координат αβ, связанной со статором, с помощью преобразования Кларк в блоке 2, который подключен к синхронному двигателю 1. Сигналы i(t) и u(t) подают на блок фильтрации и вычислитель сигналов расширенной регрессионной модели 3 для формирования сигналов матриц C(t) и Φ(t). Внутри блока 3 сигналы i(t) и u(t) фильтруют при заданных параметрах ξ1 и ξ2 в блоке 4 (см. фиг. 6), отфильтрованные сигналы совместно с сигналами i(t) и u(t) передают в блок 5, где формируют сигналы компонент расширенной регрессионной модели ϕ(t) и c(t) для заданных параметров ξ1 и ξ2. Полученные в блоках 5 сигналы ϕ(t) для параметров ξ1 и ξ2 объединяют в блоке 6 и получают сигнал матрицы Φ(t), аналогично сигналы c(t) для параметров ξ1 и ξ2 объединяют в блоке 7 и получают сигнал матрицы Φ(t). Также сигнал силы тока i(t) посылают на усилитель 10 для формирования сигнала оценки потокосцепления статора Li(t). Сформированный сигналы матриц Φ(t) и C(t) посылается на блок вычисления сигналов скалярных моделей 8, где получают сигналы определителя Δ(t) и матрицы Y(t). Затем сигналы i(t) и u(t), а также сформированные сигналы Δ(t) и Y(t) посылаются на блок 9 для расчета оценки суммарного потокосцепления λ(t). С помощью сумматора 11 формируются сигналы компонент вектора оценки потокосцепления χ(t), создаваемого постоянными магнитами ротора, как разность сигнала оценки суммарного потокосцепления λ(t) и сигнала Li(t). Далее рассчитанное значение оценки потокосцепления χ(t), создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором, посылается на блок 12, где рассчитывается оценка угла поворота ротора  синхронного двигателя 1.
синхронного двигателя 1.
Работоспособность заявляемого способа определения угла поворота ротора синхронного электродвигателя подтверждается результатами экспериментов, проведенных на синхронном двигателе с постоянными магнитами ESTUN AC SERVOMOTOR EMG-10ASA22. В ходе экспериментов выполнялось сравнение заявляемого способа с ближайшим аналогом. Регистрировались следующие сигналы: измеренный угол поворота ротора с помощью энкодера θ(t), оценка угла поворота заявленным способом  оценка угла поворота выполненная способом ближайшего аналога
оценка угла поворота выполненная способом ближайшего аналога  ошибка оценивания угла поворота заявленным способом
ошибка оценивания угла поворота заявленным способом  и ошибка оценивания угла поворота ближайшим аналогом
и ошибка оценивания угла поворота ближайшим аналогом  На фиг. 2 и фиг. 3 показаны результаты экспериментов при угловой скорости вращения равной 20 рад/с. Начиная с момента времени, 0,07 с, среднеквадратичное отклонение модуля ошибки оценки угла поворота ротора заявляемым способом равно 0,0042 рад, в то время как у ближайшего аналога 0,0443 рад. Как следует из фиг. 3, скорость определения угла поворота ротора предложенного способа существенно выше, чем у ближайшего аналога.
На фиг. 2 и фиг. 3 показаны результаты экспериментов при угловой скорости вращения равной 20 рад/с. Начиная с момента времени, 0,07 с, среднеквадратичное отклонение модуля ошибки оценки угла поворота ротора заявляемым способом равно 0,0042 рад, в то время как у ближайшего аналога 0,0443 рад. Как следует из фиг. 3, скорость определения угла поворота ротора предложенного способа существенно выше, чем у ближайшего аналога.
Для более низкой скорости вращения 10 рад/с (фиг. 4 и фиг. 5), начиная с момента времени 0,07 с, среднеквадратичные отклонения модуля ошибки оценивания угла поворота равны 0,0057 рад и 0,0462 рад для заявляемого способа и ближайшего аналога, соответственно. При этом, как следует из фиг. 5, заявляемый способ, в отличие от ближайшего аналога, обеспечивает существенное уменьшение осцилляций в процессе оценивания.
Таким образом, предложенный способ обеспечивает значительное улучшение переходных характеристик в отличие от ближайшего аналога и позволяет повысить скорость определения угла поворота ротора синхронного электродвигателя с постоянными магнитами.
Изобретение относится к области электротехники и может быть использовано в системах векторного управления синхронным электродвигателем с постоянными магнитами без применения датчиков для измерения угла поворота ротора двигателя. Технический результат заключается в повышении скорости бездатчикового определения угла поворота ротора. Способ бездатчикового определения угла поворота ротора заключается в измерении мгновенных значений сил токов и напряжений на фазах статора. Далее происходит трансформация измеренных значений в стационарную систему координат αβ. Определение положения ротора осуществляется на основе оценок компонент потокосцепления, полученных с помощью адаптивного наблюдателя на базе динамического расширения и смешивания регрессора, отличающегося повышенным быстродействием. 6 ил.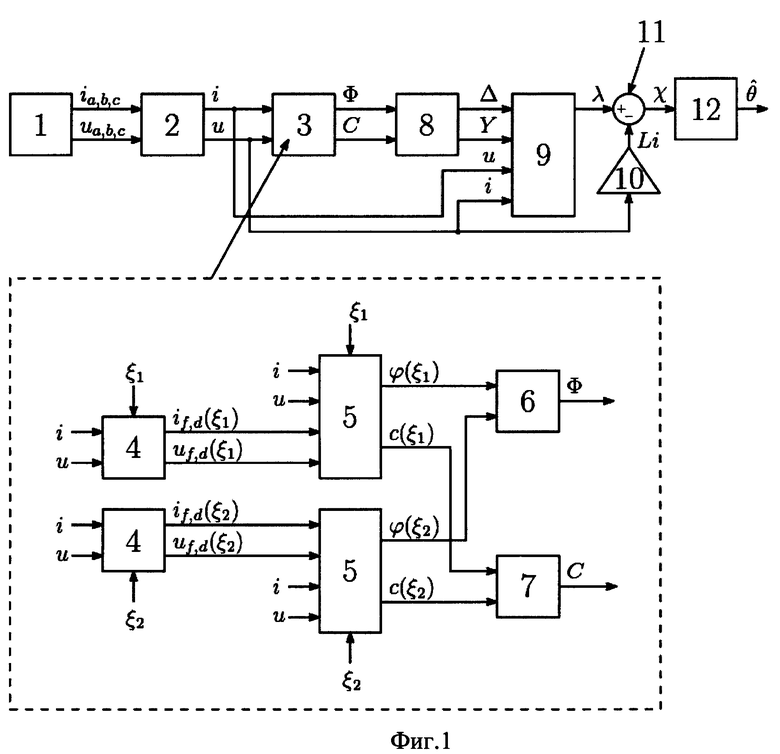
Способ определения угла поворота ротора синхронного электродвигателя с постоянными магнитами, заключающийся в измерении мгновенных значений силы тока в фазах статора ia(t), ib(t), ic(t), мгновенных значений напряжений на фазах статора uа(t), ub(t), uс(t), расчета мгновенных значений силы тока i(t) и напряжения u(t) в двухфазной стационарной системе координат αβ, связанной со статором, с помощью преобразования Кларк, определения угла поворота ротора  с учетом номинальных или измеренных значений сопротивления R и индуктивности L обмоток статора, а также выбранных настраиваемых параметров, по формуле:
с учетом номинальных или измеренных значений сопротивления R и индуктивности L обмоток статора, а также выбранных настраиваемых параметров, по формуле:
где k - количество пар полюсов, χα(t) и χβ(t) - компоненты оценки потокосцепления  создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором, отличающийся тем, что для формирования сигналов вектора оценки потокосцепления магнитов ротора χα(t) и χβ(t) сигналы токов i(t) и напряжений u(t) в системе координат αβ передают в блоки фильтрации с различными параметрами ξn>0, n принимает значения 1 и 2, которые реализуют по формулам:
создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором, отличающийся тем, что для формирования сигналов вектора оценки потокосцепления магнитов ротора χα(t) и χβ(t) сигналы токов i(t) и напряжений u(t) в системе координат αβ передают в блоки фильтрации с различными параметрами ξn>0, n принимает значения 1 и 2, которые реализуют по формулам:
далее фильтрованные сигналы токов и напряжений iƒ(t, ξn), id(t, ξn), uƒ(t, ξn), ud(t, ξn) и сигналы i(t), u(t) передают в блок вычисления сигналов расширенной модели, где при различных параметрах ξn формируют сигналы компонент расширенной регрессионной модели ϕ(t, ξn) и c(t, ξn) по формулам:


их объединяют в блоках объединения сигналов расширенной регрессионной модели по правилу:

и формируют сигналы скалярных моделей в блоке вычисления сигналов скалярных моделей по формулам:
Δ(t)=det{Ф(t)},
Y(t)=adj{Ф(t)}C(t),
det{Ф(t)}, adj{Ф(t)} - определитель и союзная матрица от матрицы Ф(t), полученные сигналы и сигналы тока i(t) и напряжения u(t) в стационарной системе координат αβ передают в блок оценивания магнитного потока, где формируют сигнал оценки суммарного потокосцепления λ(t) по закону:

γ>0 - настраиваемый коэффициент усиления, одновременно сигнал i(t) усиливают в L раз и вычитают в сумматоре из сигнала оценки суммарного потокосцепления λ(t), в результате чего получают сигнал вектора оценки потокосцепления магнитов ротора χ(t).
| US 10291160 B1, 14.05.2019 | |||
| EP 3179624 A1, 14.06.2017 | |||
| CN 109194208 A, 11.01.2019 | |||
| CN 109004869 A, 14.12.2018 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ РОТОРА И/ИЛИ УГЛА РОТОРА РЕАКТИВНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ, УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, А ТАКЖЕ ПРИВОДНАЯ СИСТЕМА | 2015 |
|
RU2689117C2 |

