ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к летательным аппаратам, а в частности, к автоматическому управлению тягой в полете.
УРОВЕНЬ ТЕХНИКИ
[002] Некоторые известные системы автомата тяги используются для управления величиной тяги, развиваемой летательным аппаратом во время маневрирования и/или крейсерского полета, или поддержания величины тяги, развиваемой летательным аппаратом во время маневрирования и/или крейсерского полета. Обычно система автомата тяги может быть переведена в режим удержания, или стабилизации, в котором автомат тяги больше не управляет величиной тяги, развиваемой летательным аппаратом. Известные системы автомата тяги не обеспечивают автоматического перехода в другой режим после перевода системы автомата тяги в режим удержания, пока пилотом не будет подана соответствующая команда.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[003] Приведенный в качестве примера способ включает вычисление, с использованием процессора, угла датчика положения рычага управления двигателем (thrust resolver angle) на основании параметра полета летательного аппарата, и управление рычагом управления двигателем с предотвращением его перемещения за пределы угла датчика положения рычага управления двигателем и/или диапазона, заданного углом датчика положения рычага управления двигателем, для поддержания предпочтительного режима полета летательного аппарата.
[004] Еще один приведенный в качестве примера способ включает анализ, выполняемый с использованием процессора, принятого воздействия на полет и по меньшей мере одного параметра полета для определения, приведет ли воздействие на полет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета. Приведенный в качестве примера способ также предусматривает включение автомата тяги в режиме удержания при определении, что воздействие на полет не приведет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета.
[005] Приведенный в качестве примера материальный машиночитаемый носитель содержит инструкции, сохраненные на нем, которые при исполнении побуждают процессор определять, что воздействие на полет летательного аппарата приведет к непредпочтительному параметру полета летательного аппарата, и на основании произведенного определения изменять режим автомата тяги летательного аппарата для поддержания предпочтительного параметра полета летательного аппарата.
[006] Приведенное в качестве примера устройство включает в себя датчик летательного аппарата для определения параметра полета летательного аппарата, процессор для вычисления предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем для поддержания предпочтительного параметра полета летательного аппарата, и электромеханический механизм для управления рычагом управления двигателем с предотвращением его перемещения за пределы указанного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем для поддержания предпочтительного параметра полета летательного аппарата.
[007] Изобретение может включать в себя способ, который может включать вычисление, с использованием процессора, угла датчика положения рычага управления двигателем на основании параметра полета летательного аппарата; и управление рычагом управления двигателем с предотвращением его перемещения за пределы угла датчика положения рычага управления двигателем и/или диапазона, заданного углом датчика положения рычага управления двигателем, для поддержания предпочтительного режима полета летательного аппарата. Вычисление угла датчика положения рычага управления двигателем может быть также основано на выбранном автоматическом режиме летательного аппарата. Это приведет к улучшению работы. В отношении улучшения работы параметр полета может включать по меньшей мере один из таких параметров, как скорость, тангаж, рыскание, крен или высота летательного аппарата. Вычисление угла датчика положения рычага управления двигателем может быть основано на области, заданной диапазонами скорости и тяги, чтобы улучшить точность. Управление рычагом управления двигателем может включать ограничение диапазона перемещения рычага управления двигателем для улучшения функциональных возможностей предлагаемого изобретения. Ограничение для рычага управления двигателем может включать ограничение рычага управления двигателем электромеханическими средствами. Управление рычагом управления двигателем может включать предотвращение перевода системы автомата тяги в режим удержания. Предпочтительный режим полета может включать поддержание скорости летательного аппарата на значении, превышающем скорость срабатывания автомата тряски ручки управления для летательного аппарата.
[008] Изобретение может включать в себя способ управления автоматом тяги летательного аппарата, который может включать анализ, выполняемый с использованием процессора, принятого воздействия на полет и по меньшей мере одного параметра полета для определения, приведет ли воздействие на полет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета; и включение автомата тяги в режиме удержания при определении, что воздействие на полет не приведет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета. Способ также может включать автоматическое изменение режима автомата тяги после определения, что воздействие на полет приведет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета. Это приведет к улучшению работы предлагаемого изобретения. Способ также может включать автоматическое изменение режима автомата тяги с переводом из режима удержания в другой режим на основании того, когда летательный аппарат проявляет тенденцию к выходу из предпочтительного состояния полета. Способ также может включать управление уровнем рычага управления двигателем с превышением угла датчика положения рычага управления двигателем, причем угол датчика положения рычага управления двигателем может быть основан на области, заданной диапазонами скорости и тяги. Предпочтительное состояние полета может включать скорость, превышающую скорость срабатывания автомата тряски ручки управления летательного аппарата.
[009] Изобретение может включать материальный машиночитаемый носитель, имеющий сохраненные на нем инструкции, которые при исполнении побуждают процессор определять, что воздействие на полет летательного аппарата приведет непредпочтительному параметру полета летательного аппарата; и на основании произведенного определения изменять режим автомата тяги летательного аппарата для поддержания предпочтительного параметра полета летательного аппарата. Машиночитаемый носитель, при исполнении содержащихся на нем команд, также может побуждать процессор производить вычисление предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем. Машиночитаемый носитель, имеющий сохраненные на нем инструкции, которые при исполнении также могут побуждать процессор управлять электромеханической системой для подавления перемещения рычага управления двигателем с отклонением от указанного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем. Воздействие на полет может включать команду на выполнение автоматической программы полета. Воздействие на полет может включать ручной ввод для улучшения функциональных возможностей. Процессор может определять, что летательный аппарат может проявлять тенденцию к отклонению от предпочтительного параметра полета, и определять, что воздействие на полет приведет к непредпочтительному параметру полета летательного аппарата.
[0010] Изобретение может включать устройство, которое может включать в себя датчик летательного аппарата для определения параметра полета летательного аппарата; процессор для вычисления предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем на основе параметра полета для поддержания предпочтительного параметра полета летательного аппарата; и электромеханический механизм для управления рычагом управления двигателем с предотвращением его перемещения за пределы указанного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем. Устройство может быть использовано для вычисления указанного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем посредством сравнения воздушной скорости летательного аппарата с областью, заданной диапазонами скорости и тяги. Процессор может быть использован для вычисления указанного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем также на основании воздействия на полет. Процессор может быть использован для включения или выключения режима удержания системы автоматического управления тягой летательного аппарата на основании воздействия на полет.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
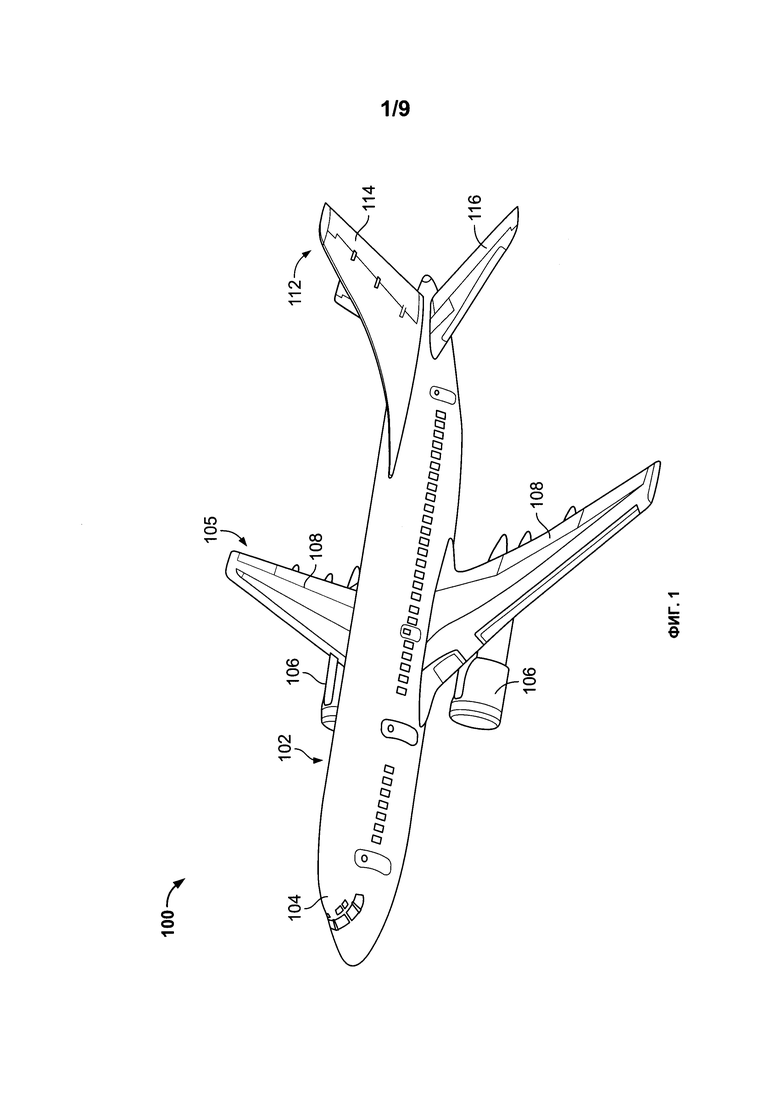
[0011] На ФИГ. 1 показан пример летательного аппарата, в котором могут быть реализованы примеры, раскрытые в настоящем документе.
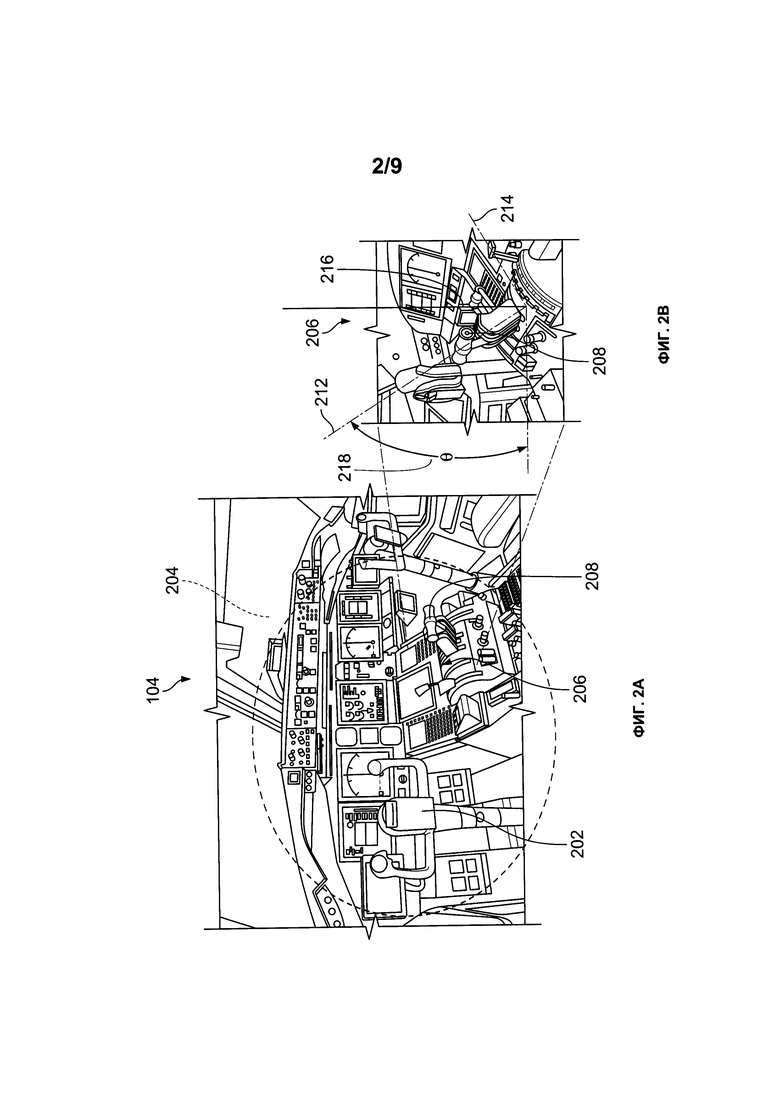
[0012] На ФИГ. 2А показан внутренний вид приведенной в качестве примера кабины по ФИГ. 1.
[0013] На ФИГ. 2В показан подробный вид примера средств управления тягой приведенной в качестве примера кабины по ФИГ. 1 и 2.
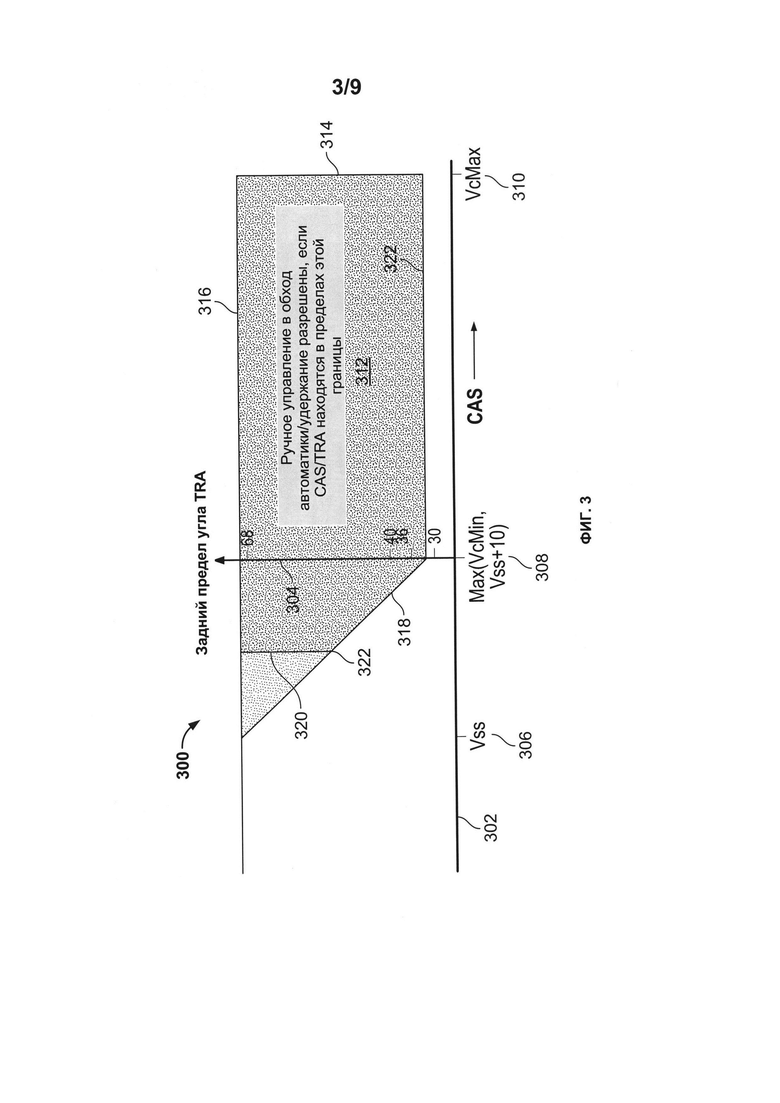
[0014] На ФИГ. 3 показан пример графика управления тягой в соответствии с положениями раскрытия настоящего изобретения.
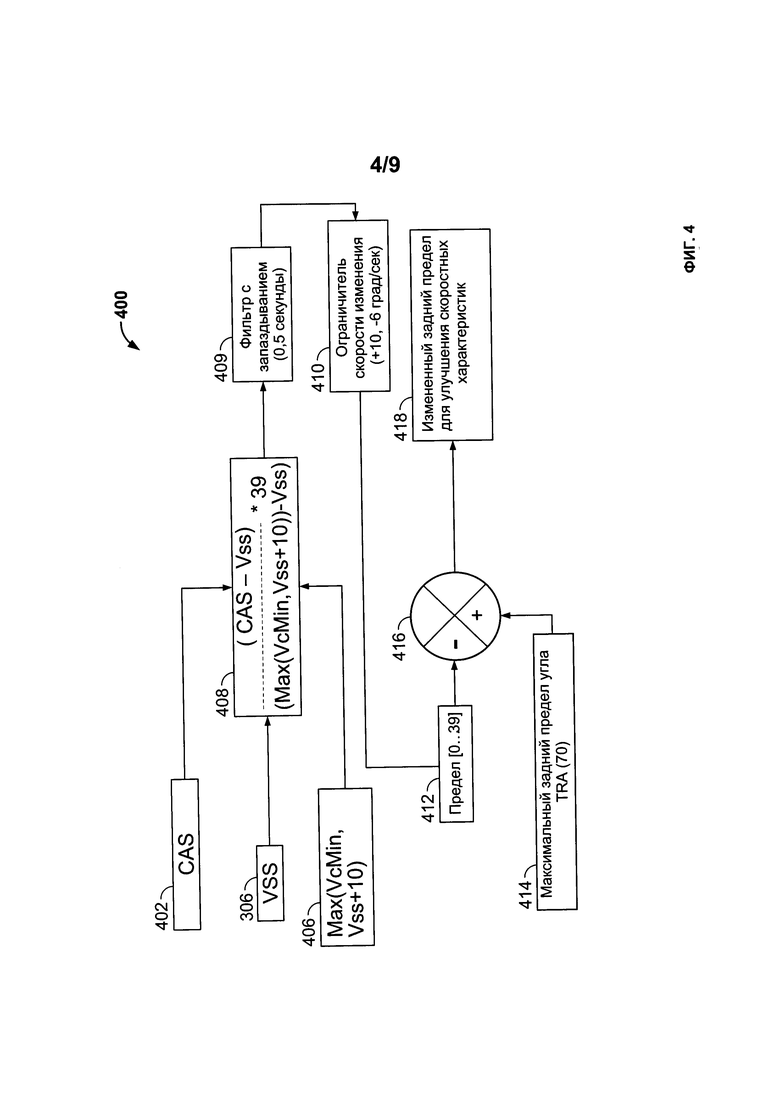
[0015] На ФИГ. 4 схематически показан пример алгоритма для реализации примеров, раскрытых в настоящем документе.
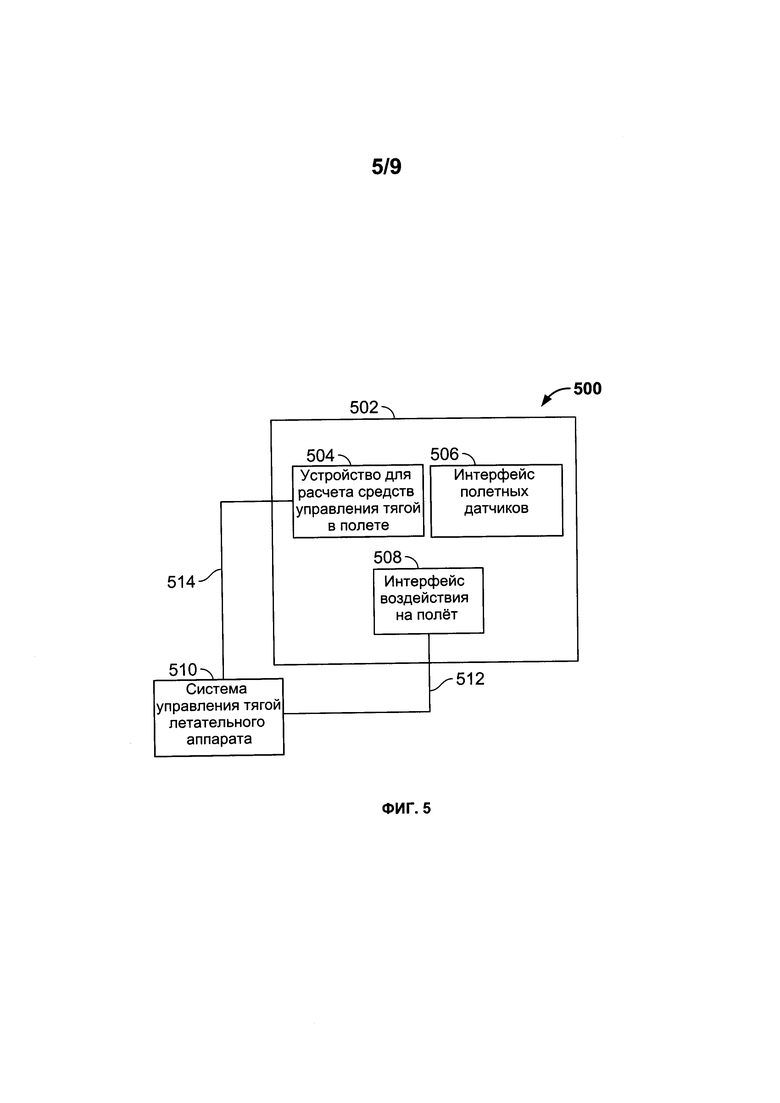
[0016] На ФИГ. 5 показан пример системы управления тягой, которая может быть использована для реализации примеров, раскрытых в настоящем документе.
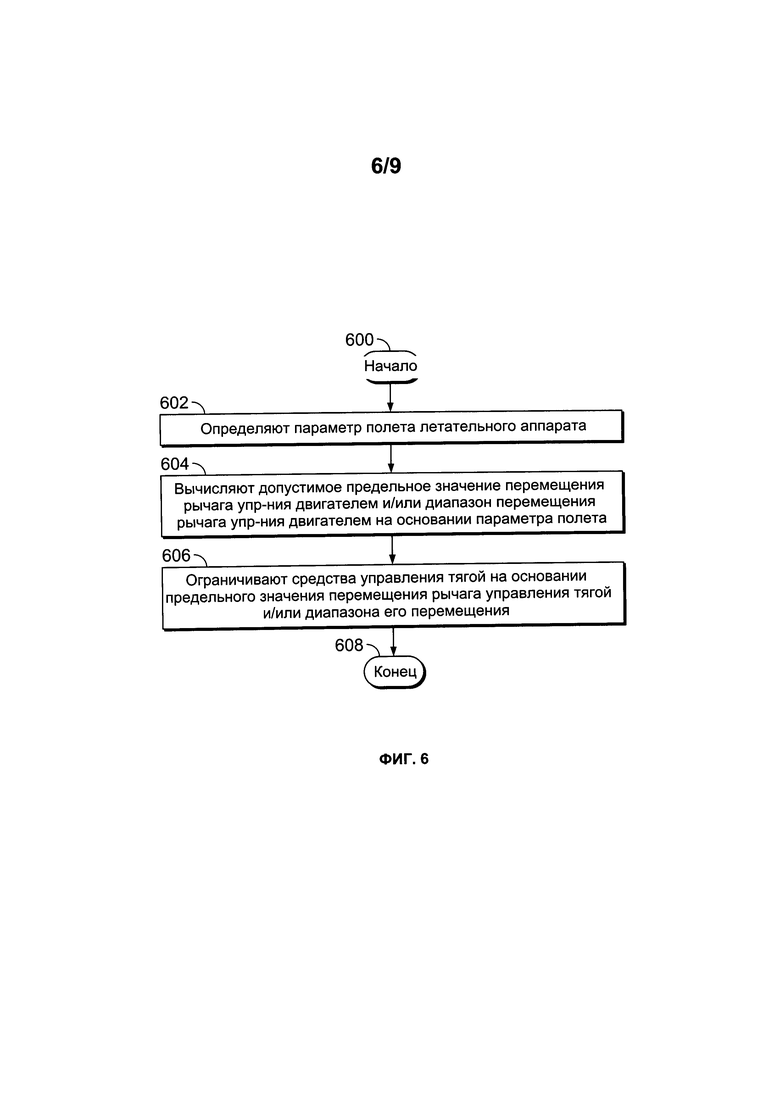
[0017] На ФИГ. 6 показана структурная схема приведенного в качестве примера способа, который может быть использован для реализации примера системы управления тягой по ФИГ. 5.
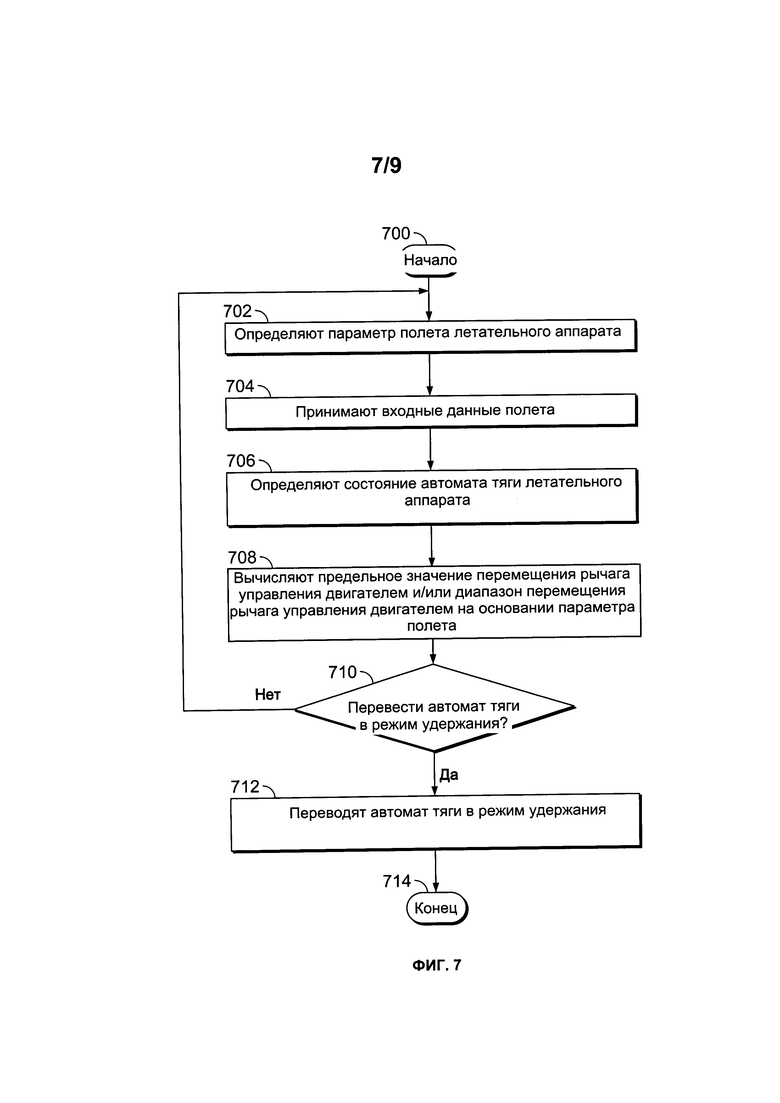
[0018] На ФИГ. 7 показана структурная схема еще одного приведенного в качестве примера способа, который может быть использован для реализации примера системы управления тягой по ФИГ. 5.
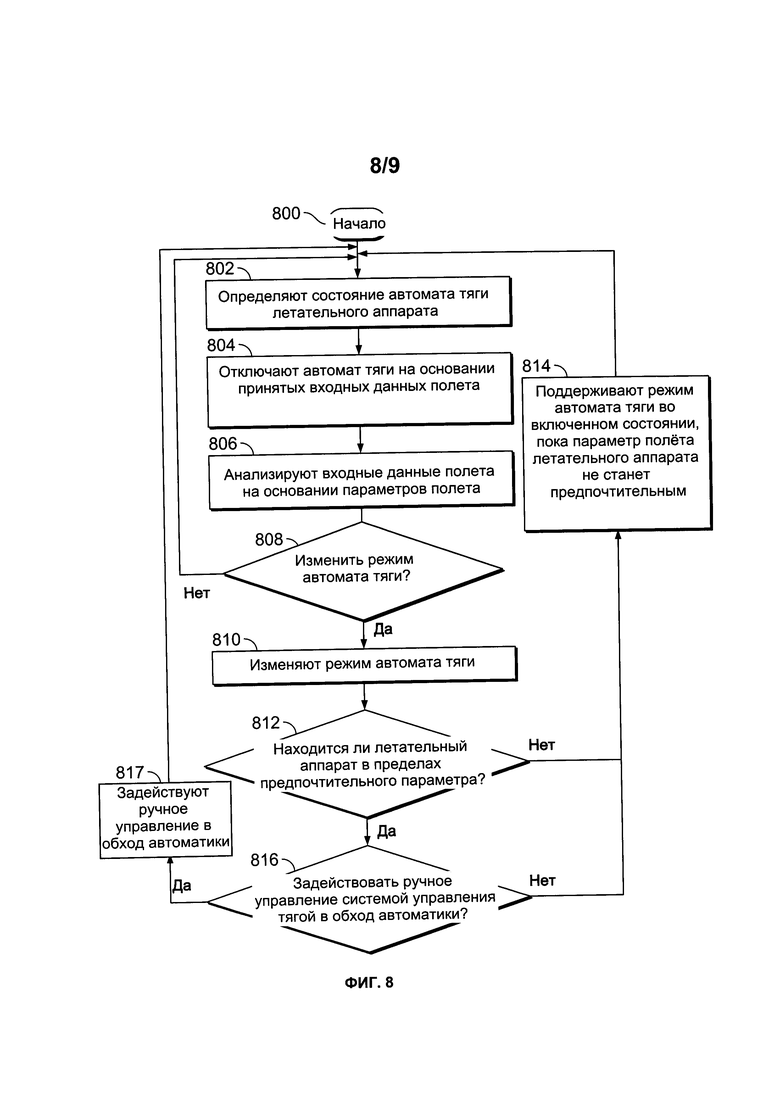
[0019] На ФИГ. 8 показана структурная схема еще одного приведенного в качестве примера способа, который может быть использован для реализации примера системы управления тягой по ФИГ. 5.
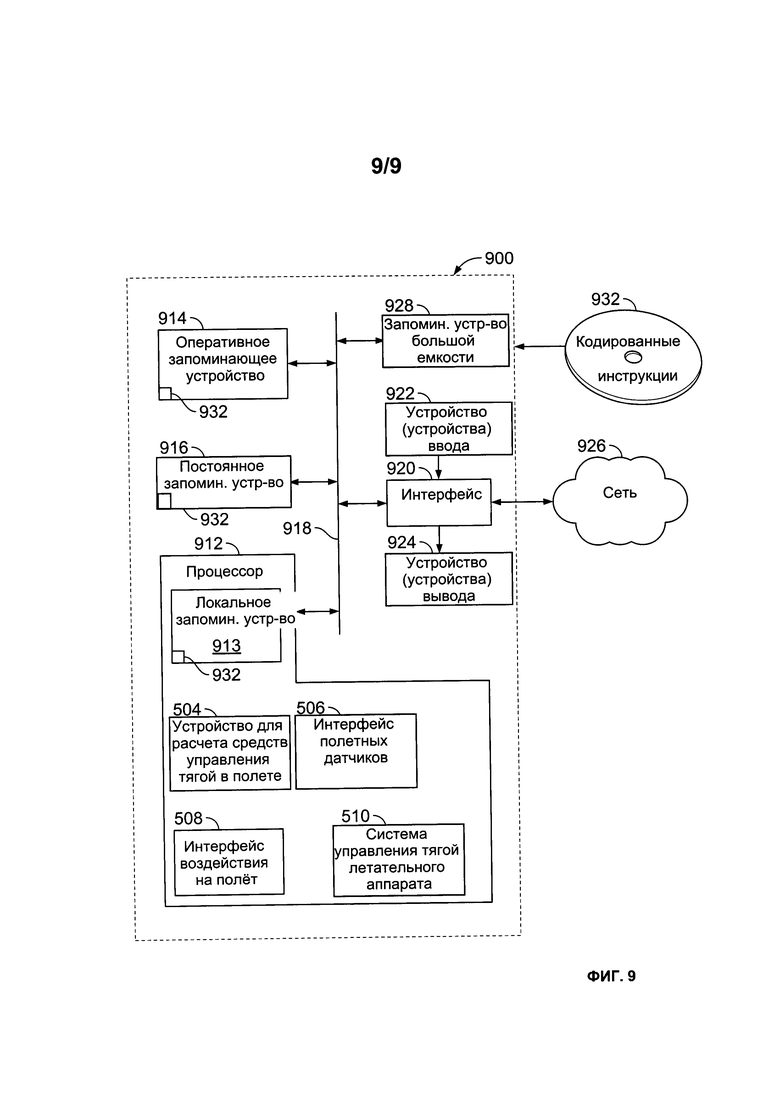
[0020] На ФИГ. 9 показана блок-схема приведенной в качестве примера процессорной платформы, выполненной с возможностью исполнения машиночитаемых инструкций для реализации приведенных в качестве примера способов по ФИГ. 6-8.
[0021] Фигуры чертежей выполнены не в масштабе. Вместо этого для более ясного показа множества слоев и областей, толщина указанных слоев на чертежах может быть увеличена. Там, где это возможно, одни и те же ссылочные номера будут использоваться на фигуре (фигурах) чертежей и в сопровождающем текстовом описании для обозначения одних и тех же или аналогичных частей. Как использовано в данном патенте, выражение, что какая-либо часть каким-либо образом размещена (например, размещена, помещена, расположена или выполнена и т.д.) на еще одной части, означает, что упомянутая часть находится в контакте с указанной другой частью или что упомянутая часть находится над другой частью с одной или более промежуточными частями, расположенными между ними. Выражение, что какая-либо часть находится в контакте с другой частью, означает, что между указанными двумя частями нет промежуточных частей.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0022] В настоящем изобретении раскрыто автоматическое управление тягой в полете. Некоторые известные системы автомата тяги летательных аппаратов используются для управления величиной тяги, развиваемой летательным аппаратом во время маневрирования и/или крейсерского полета, или поддержания величины тяги, развиваемой летательным аппаратом во время маневрирования и/или крейсерского полета, например. Эти известные системы автомата тяги обеспечивают возможность перевода летательного аппарата в режим удержания, в котором система автомата тяги управляется не в автоматическом режиме и/или ее работа приостанавливается на основании вводимых пилотом полетных данных. В результате, пилот может иметь возможность задания установок рычага управления двигателем летательного аппарата и получить непредпочтительный параметр и/или перевести летательный аппарат в режим низкой производительности. В известных типичных системах после перевода в режим удержания, система автомата тяги не производит автоматического изменения режимов без получения на это команд от пилота.
[0023] Примеры, раскрытые в настоящем документе, обеспечивают предотвращение перехода летательного аппарата в режим полета с непредпочтительным параметром полета независимо от факта включения или задействования режима удержания автомата тяги. Примеры, раскрытые в настоящем документе, обеспечивают контроль и/или установку диапазона перемещения рычага управления двигателем и/или установок рычага управления двигателем летательного аппарата на основании параметров полета летательного аппарата и/или принятого воздействия на полет (например, команды воздействия на полет, команды из кабины и т.д.). В некоторых примерах параметры полета используются для вычисления угла датчика положения рычага управления двигателем (например, предельного значения датчика положения рычага управления двигателем), который ограничивает (например, препятствует перемещению) и/или задает граничные значения для рычага управления двигателем (например, средств управления тягой). Например, средства управления тягой (например, средства автоматического управления тягой) могут удерживаться от выхода за пределы заданного угла датчика положения рычага управления двигателем (TRA) и/или диапазона, заданного углом датчика положения рычага управления двигателем. В некоторых примерах электромеханическая система управления может предотвращать физическое перемещение средств управления тягой и/или рычага управления двигателем (например, ручки управления двигателем) за пределы вычисленного угла датчика положения рычага управления двигателем, например. Например, исполнительный механизм и/или соленоид может быть использован для управления (например, предотвращения перемещения за пределы) поворотом средства управления тягой и/или рычага управления двигателем с предотвращением его перемещения за пределы угла и/или углового диапазона, заданного вычисленным углом датчика положения рычага управления двигателем.
[0024] В других примерах воздействие на полет для летательного аппарата сравнивают с вычисленным углом датчика положения рычага управления двигателем или анализируют относительно этого угла, который определяют на основании параметра (параметров) полета, и исходя из вычисленного угла датчика положения рычага управления двигателем воздействие на полет может быть не начат. В частности, вводимые полетные данные могут сравниваться с установкой предпочтительной тяги/скорости, которую вычисляют на основании параметра (параметров) полета, чтобы определить, нужно ли осуществить ли воздействие на полет и/или включить управление тягой в обход автоматики/режима удержания.
[0025] В других примерах летательный аппарат возвращают в другой режим автомата тяги из режима удержания, когда параметр полета летательного аппарата соответствует непредпочтительному параметру полета летательного аппарата. Например, режим автомата тяги может быть изменен автоматически, когда скорость летательного аппарата, движущегося ниже заданного диапазона и/или установки тяги, задана ниже вычисленного допустимого и/или предпочтительного угла датчика положения рычага управления двигателем.
[0026] При использовании в настоящем документе термины "команда воздействия на полет" или "воздействие на полет" могут относиться к ручным командам, выдаваемым в кабине, или команде на переход в режим автоматического полета (например, выбранный автоматический режим, режим автопилота, режим изменения эшелона полета ("FLCH"), команде на взлет и ухода на второй круг ("TOGA"), команде на выполнение вертикальной навигации ("VNAV", "VNAV IDLE", "VNAV HOLD") и т.д.). Иными словами, термины "воздействие на полет" или "команда воздействия на полет" могут относиться к ручному управлению или задействованию режима автоматического полета, например. При использовании в настоящем документе термин "параметр полета" может охватывать, но без ограничения, воздушную скорость, высоту, топографию местности, скорость воздуха, параметры воздуха (например, турбуленцию), пространственное положение, рыскание, тангаж, крен и/или метеоусловия и т.д.
[0027] На ФИГ. 1 показан приведенный в качестве примера летательный аппарат 100, в котором могут быть реализованы примеры, раскрытые в настоящем документе. Показанный пример летательного аппарата 100 включает в себя фюзеляж 102 с кабиной 104, крыльями 105 с двигателями 106 и управляющими поверхностями (например, закрылками, элеронами, щитками и т.д.) 108, которые расположены на задней кромке крыльев 105 и могут быть смещены или отрегулированы (например, под углом и т.д.), чтобы обеспечить, например, подъемную силу во время взлета. Приведенный в качестве примера летательный аппарат 100 также включает в себя стабилизаторы 112 с рулями 114 направления и рулями 116 высоты. В некоторых примерах осуществляют управление органами управления соответствующими двигателями 106 для изменения скорости летательного аппарата 100 и/или управления скоростью летательного аппарата 100. В этом примере результирующая тяга двигателей 106 наряду с перемещением управляющих поверхностей 108, руля 114 направления и/или руля 116 высоты используются для управления летательным аппаратом 100 или направления летательного аппарата 100 во время маневрирования, такого как управляемое снижение (например, управляемое и/или увеличение/уменьшение высоты с управляемой скоростью) и/или исполнения автоматической программы полета, такой как программа на взлет и уход на второй круг или программа вертикальной навигации (VNAV) и т.д.
[0028] На ФИГ. 2А показан внутренний вид приведенной в качестве примера кабины 104 по ФИГ. 1. Как можно видеть из примера, показанного на ФИГ. 2А, кабина 104 включает в себя ручку 202 управления полетом, приборную доску 204 и средства 206 управления тягой, которые содержат рычаг 208 управления двигателем (например, ручку управления двигателем). При работе пилот в кабине 104 может считывать и/или получать полетные данные и/или данные о параметрах полета летательного аппарата 100 с приборной доски 204. На основании этих данных один или более органов управления летательного аппарата 100 могут быть использованы пилотом для направления летательного аппарата 100 во время полета. В этом примере тягой летательного аппарата 100 управляют с помощью рычага 208 управления двигателем, средств 206 управления тягой, в целом, и/или органами управления, находящимися в кабине 104 и относящимися к настройкам автомата тяги (например, органами управления, находящимися на приборной доске 204 и т.д.).
[0029] На ФИГ. 2В показан подробный вид примера средств 206 управления тягой приведенной в качестве примера кабины 104 по ФИГ. 1 и 2А. В примере, показанном на ФИГ. 2В, рычаг 208 управления двигателем может быть нажат и/или повернут по направлению к передней части летательного аппарата 100 или от нее для изменения выходной величины тяги двигателей 106. Например, пилот может толкать рычаг 208 управления двигателем вперед по направлению к передней части летательного аппарата 100 для увеличения тяги двигателей 106. Схожим образом, пилот может потянуть назад и/или повернуть рычаг 208 управления двигателем назад по направлению к задней части летательного аппарата 100 для уменьшения выходной тяги и/или газа двигателей 106.
[0030] В результате наличия возможности перемещения рычага 208 управления двигателем вперед и назад для изменения выходной мощности двигателей 106, рычаг 208 управления двигателем в показанном примере имеет задний предел (например, установку заднего предела для рычага управления двигателем) 212 и передний предел (например, установку верхнего предела для рычага управления двигателем) 214. В этом примере задний предел 212 и передний предел 214 задают предельные диапазоны перемещения рычага 208 управления двигателем, которые не изменяются и/или не перестраиваются во время полета в этом примере. При этом в некоторых примерах может быть использовано физическое и/или электромагнитное устройство для ограничения диапазона перемещения рычага 208 управления двигателем. В дополнительном или альтернативном варианте реализации могут быть изменены диапазоны рычага 208 управления двигателем (например, значения переднего и заднего пределов, перестраиваемых и/или изменяемых, чтобы учесть изменения в допустимом диапазоне) в отличие от физического ограничения диапазона перемещения рычага 208 управления двигателем (например, в системе дистанционного управления рулями с помощью электроприводов).
[0031] В некоторых примерах и как описано более подробно ниже в связи с ФИГ. 3, задний предел 212 и/или передний предел 214 могут быть изменены и/или перестроены (например, во время полета и/или по различным параметрам полета) для изменения разрешенного диапазона угла 218, обозначенного символом θ, под которым размещают рычаг 208 управления двигателем для задания величины тяги, развиваемой двигателями 106. В примерах, приведенных в настоящем документе, текущие углы (например, их мгновенные значения) и/или управляемые углы рычага управления двигателем и/или заданные значения относятся к углу 218. В частности, задний предел 212 показанного примера соответствует значению примерно 31 градус относительно горизонтали, а передний предел 214 соответствует значению примерно 70 градусов относительно горизонтали с заданием, таким образом, максимального углового диапазона (например, углового диапазона смещения) примерно 39 градусов для рычага 208 управления двигателем. Однако вместо приведенных могут быть использованы любые соответствующие пределы для углов и/или углового диапазона (угловых диапазонов).
[0032] На ФИГ. 3 показан приведенный в качестве примера график 300 управления тягой в соответствии с положениями раскрытия настоящего изобретения. Приведенный в качестве примера график 300 управления тягой соотносит диапазон скорости и тягу и имеет горизонтальную ось 302, которая представляет индикаторную воздушную скорость ("СAS") и/или скорость летательного аппарата 100. Приведенный в качестве примера график 300 управления также имеет вертикальную ось 304, которая представляет угол рычага управления двигателем (например, угол датчика положения рычага управления двигателем, угол 218) летательного аппарата 100. В этом примере угол рычага управления двигателем представлен в градусах. В частности, в этом примере угол рычага управления двигателем составляет примерно 30 градусов (например, задний предел 212 составляет величину около 31 градуса). Как можно видеть из примера, показанного на ФИГ. 3, горизонтальная ось 302 включает в себя скорость 306 срабатывания автомата тряски ручки управления, обозначенную как Vss, и обозначает предельную скорость, при которой рукоятка управления, такая как ручка 202 управления полетом, может получать тряску или вибрацию для предупреждения пилота. В частности, вибрационное устройство, подсоединенное с возможностью связи к рукоятке управления, может вибрировать, когда скорость находится ниже порогового значения, что эквивалентно скорости 306 срабатывания автомата тряски ручки управления, например. В этом примере скорость 308 перехода задана посредством принятия максимума минимальной скорости (например, минимальной скорости, допускаемой автоматизированной системой управления полетом), обозначенной как VсMin, или суммы с приращением, обозначенной как Vss+10, для скорости 306 срабатывания автомата тряски ручки управления, Vss, и приращения, составляющего в этом примере 10 узлов (18,5 км/ч). Однако любое подходящее значение приращения может быть использовано исходя из конструкции летательного аппарата, параметров воздуха, маневренности летательного аппарата и т.д. В этом примере максимальная скорость 310 летательного аппарата 100 обозначена как VсMax.
[0033] В этом примере граница (например, огибающая, многоугольная область и т.д.) задает область 312 графика 300 управления, в которой включено ручное управление (например, инициирование команды удержания) системой автомата тяги в обход автоматики. Иными словами, в показанном примере в пределах области 312 пилот может управлять системой автомата тяги в обход автоматики и переводить систему автомата тяги в режим удержания. В дополнительном или альтернативном варианте реализации область 312 может задавать допустимый/ разрешенный диапазон перемещения рычага управления двигателем (например, непрерывно перенастраиваемый задний предел 212 и/или передний предел 214 на основании параметра полета и/или обновленного параметра полета). Иными словами, область 312 также может быть использована для ограничения разрешенного диапазона перемещения рычага управления двигателем (например, допустимого/разрешенного диапазона перемещения рычага управления двигателем) на основании скорости летательного аппарата 100.
[0034] Для задания области 312 примем, что область 312 имеет первую границу или первый край 314, которая или который задается скоростью (например, VсMax) 310, и вторую границу или второй край 316, которая или который задается передним пределом 214 рычага управления двигателем. Для задания зависимости изменения газа или тяги возле значений индикаторной воздушной скорости, близких к скорости 306 срабатывания автомата тряски ручки управления, используется наклонная линия 318, которая задает третью границу или третий край, представляющую или представляющий часть области 312, в которой не может быть задействовано ручное управление автоматом тяги в обход автоматики. В дополнительном или альтернативном варианте реализации наклонная линия 318 задает предельные значения перемещения рычага управления двигателем, при которых может быть произведено управление средствами управления тягой и/или предотвращено их перемещение согласно принимаемой команде воздействия на полет (например, ручной команде или команде, инициирующей автоматическую программу, например на взлет и ухода на второй круг). Определение наклона линии 318 более подробно раскрыто ниже в связи с ФИГ. 4.
[0035] В альтернативном варианте реализации в некоторых примерах часть и/или внешний предел области 312 задается четвертой границей или четвертым краем 320. В таких примерах после того, как индикаторная воздушная скорость достигнет значения ниже точки 322 перехода, предотвращается переход предела автоматической/управляемой тяги ниже переднего предела (например, переднего предела 214) и/или в некоторых примерах пилоту не позволяют войти в режим удержания, который приведет к переходу установки тяги ниже переднего предела. Иными словами, в этих примерах после того, как скорость летательного аппарата 100 будет находиться ниже порогового значения, соответствующего точке 322 перехода, углу датчика положения рычага управления двигателем не разрешается быть меньше переднего предела тяги в управляемом режиме или, в альтернативном варианте реализации, в ручном режиме.
[0036] В некоторых примерах область 312 задают/обновляют непрерывно на основании изменения параметра (параметров) полета. Хотя область 312 имеет примерную форму, показанную на ФИГ. 3, может быть использована любая подходящая форма.
[0037] На ФИГ. 4 схематически показан пример алгоритма 400 для реализации примеров, раскрытых в настоящем документе. В примере, показанном на ФИГ. 4, индикаторная воздушная скорость 402, обозначенная как CAS, а также скорость 306 срабатывания автомата тряски ручки управления, обозначенная как Vss, являются входными данными для функции 408. В некоторых примерах вычисляют нижнее конечное значение 406 скорости, также поступающее в функцию 408, в качестве максимума (Vcmin, Vss+10), где Vcmin - минимальная скорость управления летательного аппарата, где Vss - вышеупомянутая скорость 306 срабатывания автомата тряски ручки управления, а Vss+10 - рассматриваемая с приращением скорость срабатывания автомата тряски ручки управления, эквивалентная скорости 306 плюс добавленная номинальная скорость, составляющая в этом примере 10 узлов (18,5 км/ч). Однако исходя из конструкции летательного аппарата, параметров полета, режима полета и т.д. может быть использована любая другая подходящая добавленная номинальная скорость. В этом примере функция 408 используется для вычисления наклона и/или задания наклонной линии 318 (например, задания линейной функции наклонной линии 318). Вычисление функции 408 представлено ниже в виде уравнения 1:

В этом примере скорость 306 срабатывания автомата тряски ручки управления (Vss) зависит от параметров полета летательного аппарата, измеряемых одним или более датчиками летательного аппарата. В частности, скорость 306 срабатывания автомата тряски ручки управления может быть вычислена исходя из высоты и/или пространственного положения летательного аппарата. В некоторых примерах скорость Vss может зависеть от нижнего предела скорости, такого как минимальная скорость управления (например, составлять 1,3 от минимальной скорости управления).
[0038] В этом примере после вычисления наклона функции 408 используют фильтр 409 с запаздыванием для сглаживания и/или уменьшения случайных изменений выходной функции 408. В некоторых примерах используют ограничитель 410 скорости для ограничения скоростей изменения углов рычага управления двигателем. Предельные значения 412 диапазона затем обеспечивают преобразование вычисленного наклона исходя из вычисления 408 с получением углового диапазона средств управления тягой, который в этом примере составляет от 0 до 39 градусов, для задания нижнего предельного значения угла. В частности, угловой диапазон от 0 до 39 градусов в этом примере задан задним пределом автомата тяги величиной 31 градус, при этом задний упор выполнен в положении 33 градусов, а точка задания тяги для набора высоты находится в положении 68 градусов. В этом примере максимальная точка для автомата тяги находится в положении 70 градусов, а соответствующий физический упор выполнен в положении 80 градусов. В результате, максимальная точка для средств управления тягой в положении 70 градусов минус задний предел автомата тяги величиной 31 градус дают диапазон в 39 градусов.
[0039] Далее, максимальный предельный угол рычага управления двигателем (например, максимальное значение заднего предела) 414 подают вместе с нижним предельным значением угла из предельных значений 412 диапазона для выполнения математической операции (например, сложения или вычитания и т.д.) 416 для определения вычисленного/измененного заднего предела (например, предельного значения заднего предела 212) 418, чтобы улучшить эксплуатационные характеристики летательного аппарата и/или поддержать предпочтительный параметр полета летательного аппарата (например, поддержания скорости выше значения скорости Vss срабатывания автомата тряски ручки управления или при кратном значении скорости срабатывания автомата тряски ручки управления). Математическая операция 416 может быть представлена приведенным ниже уравнением 2, например:

[0040] Хотя примеры вычислений и/или фильтрования сигналов приведены выше в отношении примеров, описанных в связи с ФИГ. 4, могут быть использованы любые соответствующие уравнения, значения, операции и/или фильтрование.
[0041] На ФИГ. 5 приведен пример системы 500 управления тягой (например, системы автоматического управления тягой), которая может быть использована для реализации примеров, раскрытых в настоящем документе. Приведенная в качестве примера система 500 управления тягой включает в себя систему 502 вычисления тяги в полете, которая включает в себя устройство 504 для расчета тяги в полете, интерфейс 506 полетных датчиков и интерфейс 508 воздействия на полет. Система 500 управления в показанном примере также включает в себя систему 510 управления тягой летательного аппарата, которая соединена с возможностью связи с интерфейсом 508 воздействия на полет посредством линий 512 связи и с устройством 504 для расчета средств управления тягой в полете посредством линий 514 связи.
[0042] При работе приведенный в качестве примера интерфейс 506 полетных датчиков определяет параметры полета летательного аппарата, такого как летательный аппарат 100. В частности, интерфейс 506 полетных датчиков может определять параметры полета, такие как индикаторная воздушная скорость, высота, скорость воздуха, пространственное положение, топография местности, метеоусловия, температура воздуха и/или ориентация в полете (например, рыскание, тангаж, крен и т.д.) и т.д. на основании данных от датчиков и/или анализа данных от датчиков. В этом примере интерфейс 508 воздействия на полет принимает вводимые полетные данные, которые могут быть командами ручного управления (например, ручным управлением средствами управления тягой) и/или командами на перевод в определенный режим полета (например, перевод летательного аппарата в режим изменения эшелона полета и/или автоматический режим вертикальной навигации (VNAV)).
[0043] Для определения/расчета предпочтительных и/или допустимых уставок и/или диапазонов средств управления тягой, устройство 504 для расчета тяги в полете показанного примера использует индикаторную воздушную скорость вместе с упомянутыми выше параметрами полета и/или скоростью срабатывания автомата тряски ручки управления (Vss) для определения/расчета предпочтительного и/или допустимого диапазона перемещения рычага управления двигателем (например, отрегулированного заднего предела 212). Например, устройство 504 для расчета тяги в полете может использовать заданную область, такую как область 312 по ФИГ. 3. После определения предпочтительного и/или допустимого диапазона (диапазонов) перемещения рычага управления двигателем, устройство 504 для расчета тяги в полете показанного примера управляет системой 510 тяги летательного аппарата так, чтобы сохранять средства управления тягой в пределах предпочтительного и/или допустимого диапазона (диапазонов) перемещения рычага управления двигателем. Например, устройство 504 для расчета тяги летательного аппарата может управлять системой 510 управления тягой так, чтобы не задействовать инициирование режима удержания, если средства управления тягой выведены из предпочтительного и/или допустимого диапазона (диапазонов) перемещения рычага управления двигателем на основании принятого воздействия на полет. В частности, система 502 управления тягой в полете и/или устройство 504 для расчета тяги в полете предотвращает исполнение системой 510 управления тягой летательного аппарата входных команд на перевод летательного аппарата из режима автомата тяги в режим ручного управления/удержания на основании рассчитанного предпочтительного и/или допустимого диапазона (диапазонов) перемещения рычага управления двигателем, например. В дополнительном или альтернативном варианте реализации устройство 504 для расчета тяги в полете и/или интерфейс 508 воздействия на полет управляет системой 510 управления тягой летательного аппарата так, чтобы сохранять средства управления тягой в пределах предпочтительного и/или допустимого диапазона (диапазонов) перемещения рычага управления двигателем посредством изменения заднего предела средства управления тягой, например.
[0044] Хотя на ФИГ. 5 показан пример реализации приведенной в качестве примера системы 500 управления тягой по ФИГ. 5, один или более элементов, процессов и/или устройств, показанных на ФИГ. 5 могут быть скомбинированы, разделены, перегруппированы, не использованы, удалены и/или реализованы любым другим способом. Кроме того, приведенные в качестве примеров система 502 вычисления тяги в полете, устройство 504 для расчета тяги в полете, интерфейс 506 полетных датчиков, интерфейс 508 воздействия на полет и/или, в целом, система 500 управления тягой по ФИГ. 5 могут быть реализованы с помощью аппаратных средств, программного обеспечения, прошивки и/или любой комбинации аппаратных средств, программного обеспечения и/или прошивки. Так, например, любые из приведенных в качестве примеров системы 502 вычисления тяги в полете, устройства 504 для расчета тяги в полете, интерфейса 506 полетных датчиков, интерфейса 508 воздействия на полет и/или, в целом, системы 500 управления тягой могут быть реализованы посредством одной или более аналоговых или цифровых схем, логических схем, программируемого процессора (программируемых процессоров), специализированной интегральной схемы (специализированных интегральных схем) (ASIC), программируемого логического устройства (программируемых логических устройств) (PLD) и/или программируемой логической интегральной схемы (программируемых логических интегральных схем) (FPLD). При рассмотрении пунктов формулы настоящего патента, относящихся к любым устройствам или системам с охватыванием реализации программного обеспечения и/или прошивок, в настоящем документе ясно выражается, что по меньшей мере одно из приведенных в качестве примеров системы 502 вычисления тяги в полете, устройства 504 для расчета тяги в полете, интерфейса 506 полетных датчиков и/или интерфейса 508 воздействия на полет включают в себя материальное компьютерочитаемое устройство для хранения или диск для хранения, такие как запоминающее устройство, цифровой универсальный диск (DVD), компакт-диск (CD), Blu-Ray диск и т.д., хранящие указанные программное обеспечение и/или прошивки. Кроме того, приведенная в качестве примера система 500 управления тягой по ФИГ. 5 может включать в себя один или более элементов, процессов и/или устройств в дополнение или вместо показанных на ФИГ. 5 и/или может включать в себя более одного из любых или всех показанных элементов, процессов и устройств.
[0045] НА ФИГ. 6-8 показаны структурные схемы приведенных в качестве примера способов реализации системы 500 управления тягой по ФИГ. 5. В этих примерах способ может быть реализован посредством машиночитаемых инструкций, которые содержат программу для исполнения процессором, таким как процессор 912, показанный в приведенной в качестве примера процессорной платформе 900, раскрытой ниже в связи с ФИГ. 9. Программа может быть реализована в программном обеспечении, сохраненном на материальном компьютерочитаемом носителе данных, таком как диск CD-ROM, гибкий диск, жесткий диск, цифровой универсальный диск (DVD), Blu-Ray диск или запоминающее устройство, связанное с процессором 912, при этом вся программа и/или ее части в альтернативных вариантах реализации могут быть исполнены устройством, отличным от процессора 912, и/или реализованы в прошивке или специальных аппаратных средствах. Кроме того, хотя приведенная в качестве примера программа описана ниже со ссылкой на структурные схемы, проиллюстрированные на ФИГ. 6-8, в альтернативных вариантах реализации могут быть использованы многие другие способы реализации приведенной в качестве примера системы 500 управления тягой. Например, порядок выполнения блоков может быть изменен и/или некоторые из описанных блоков могут быть изменены, удалены или скомбинированы.
[0046] Как уже упоминалось выше, приведенные в качестве примера способы по ФИГ. 6-8 могут быть реализованы с использованием кодированных инструкций (например, компьютере- и/или машиночитаемых инструкций), сохраненных на материальном компьютерочитаемом носителе данных, таком как дисковод жесткого диска, флэш-память, постоянное запоминающее устройство (ROM), компакт-диск (CD), цифровой универсальный диск (DVD), кэш-память, оперативное запоминающее устройство (RAM) и/или любое другое устройство для хранения или диск для хранения, в котором информация хранится в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение кратких периодов времени, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "материальный компьютерочитаемый носитель данных" явным образом означает, что он включает любой тип компьютерочитаемого устройства для хранения и/или диска для хранения и исключает распространяемые сигналы, а также исключает средства передачи. При использовании в настоящем документе выражения "материальный компьютерочитаемый носитель данных" и "материальный машиночитаемый носитель данных" используются как взаимозаменяемые. В дополнительном или альтернативном варианте реализации приведенные в качестве примера способы по ФИГ. 6-8 могут быть реализованы с использованием кодированных инструкций (например, компьютеро- и/или машиночитаемых инструкций), сохраненных на имеющем некратковременную природу компьютере и/или машиночитаемом носителе, таком как дисковод жесткого диска, флэш-память, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш-память, оперативное запоминающее устройство и/или любое другое устройство для хранения или диск для хранения, в котором информация хранится в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение кратких периодов времени, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "некратковременный компьютерочитаемый носитель" явным образом означает, что он включает любой тип компьютерочитаемого устройства для хранения и/или диска для хранения и исключает распространяемые сигналы, а также исключает средства передачи. При использовании в настоящем документе, когда выражение "по меньшей мере" используется в качестве переходного термина в ограничительной части пункта формулы изобретения, оно является открытым в том смысле, в котором является открытым термин "содержащий".
[0047] Приведенный в качестве примера способ по ФИГ. 6 начинают в блоке 600, когда летательный аппарат, такой как летательный аппарат 100, находится в автоматическом режиме изменения эшелона полета (FLCH), в котором летательный аппарат изменяет высоту (например, осуществляет автоматическое снижение) (блок 600). В этом примере автопилот выключен, однако пилотажный командный прибор включен и выдает пилоту летательного аппарата сигналы наведения. Тем не менее, в отношении примера способа по ФИГ. 6, летательный аппарат показанного примера может находиться в режиме автоматического полета или может не находиться в режиме автоматического полета.
[0048] Определяют параметр полета летательного аппарата (блок 602). В частности, датчики, соединенные с возможностью связи с интерфейсом датчиков, таким как интерфейс 506 полетных датчиков, выдают информацию, относящуюся к летательному аппарату, в том числе скорость летательного аппарата (например, уточненную скорость летательного аппарата), пространственное положение, высоту, ориентацию и/или параметры воздуха. В некоторых примерах на основании этой информации определяют переменные, такие как скорость срабатывания автомата тряски ручки управления (Vss) и/или минимальные скорости (Vcmin), которые могут быть использованы в вычислениях, относящихся к предпочтительным и/или допустимым предельным значениям перемещения рычага управления двигателем.
[0049] Затем на основании указанного параметра полета вычисляют допустимое предельное значение перемещения рычага управления двигателем (например, задний предел 212) и/или диапазон перемещения рычага управления двигателем (блок 604). Например, для вычисления предельного значения перемещения рычага управления двигателем и/или допустимого диапазона перемещения рычага управления двигателем может быть использован алгоритм, такой как алгоритм 400 по ФИГ. 4. В дополнительном или альтернативном варианте реализации в этом вычислении может быть использована граница, такая как область 312 по ФИГ. 3.
[0050] В этом примере средства управления тягой (например, средства автоматического управления тягой) ограничивают на основании вычисленного предельного значения и/или диапазона перемещения рычага управления двигателем (блок 606). В некоторых примерах средства управления тягой (например, рычаг 208 управления двигателем) имеют физическое ограничение и/или их изменяют посредством электромеханической системы (например, электромеханической системы обеспечения ограничения) на основании вычисленного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем. В некоторых примерах физический диапазон средств управления тягой не изменяют, а изменяют предельные значения перемещения рычага управления двигателем для заднего предела (например, заднего предела 212) и/или переднего предела (например, переднего предела 214) на основании вычисленного допустимого предельного значения и/или диапазона перемещения рычага управления двигателем. В результате этих мероприятий средства управления тягой не могут привести летательный аппарат в непредпочтительное состояние и/или вызвать продолжение полета с ухудшенными рабочими характеристиками независимо от физического положения рычага управления двигателем.
[0051] В этом примере процесс оканчивают после наложения ограничения на рычаг управления двигателем (блок 608). Однако в некоторых примерах процесс повторяют непрерывно во время полета. В дополнительном или альтернативном варианте реализации процесс начинают и продолжают на основании нахождения летательного аппарата в заданном режиме (например, режиме включенного автомата тяги).
[0052] Со ссылкой на ФИГ. 7 показан пример способа по ФИГ. 7, который начинают в блоке 700, когда летательный аппарат, такой как летательный аппарат 100 по ФИГ. 1, находится в режиме автопилота во время крейсерского полета (блок 700). В этом примере система автомата тяги летательного аппарата включена. В отличие от примера по ФИГ. 6, вместо ограничения предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем на основании параметров полета и/или данных от датчиков, введенные полетные данные сравнивают и/или анализируют для определения того, разрешено ли вводимым полетным данным осуществлять управление системой автомата тяги в обход автоматики и/или переводить автомат тяги в режим удержания.
[0053] В этом примере определяют параметр полета летательного аппарата (блок 702). В частности, для определения параметра полета используются данные от датчиков, соединенных с возможностью связи с интерфейсом полетных датчиков, таким как интерфейс 506 полетных датчиков.
[0054] Затем принимают вводимые полетные данные (блок 704). В частности, посредством полетного интерфейса, такого как полетный интерфейс 508, принимают входную команду, поступающую от находящихся в кабине органов управления летательного аппарата. Например, входные данные могут быть данными изменения эшелона полета (FLCH) (например, управляемого снижения) для перехода на заданную высоту. В некоторых примерах воздействие на полет может быть ручным вводом, таким как изменение вручную величины тяги (например, уменьшение величины тяги и т.д.).
[0055] В некоторых примерах определяют состояние автомата тяги летательного аппарата (блок 706). В таких примерах интерфейс воздействия на полет, такой как интерфейс 508 воздействия на полет, может быть опрошен для определения того, включен ли автомат тяги. Однако в этом примере автомат тяги летательного аппарата включен, и, таким образом, состояние автомата тяги известно.
[0056] Предельное значение перемещения рычага управления двигателем (например, заднего предела 212 тяги) и/или диапазон перемещения рычага управления двигателем (например, допустимое предельное значение перемещения рычага управления двигателем и/или диапазон перемещения рычага управления двигателем, угол датчика положения рычага управления двигателем и т.д.) вычисляют на основании параметра полета (блок 708). В этом примере устройство для расчета тяги в полете, такое как устройство 504 для расчета тяги в полете, используется для определения предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем на основании параметров полета (например, индикаторной воздушной скорости, высоты, режима полета, параметров воздуха, ветра и т.д.). Для вычисления допустимого угла рычага управления двигателем и/или диапазона перемещения рычага управления двигателем, которые будут обеспечивать поддержание предпочтительного параметра полета летательного аппарата (например, в предпочтительном состоянии полета, предпочтительном режиме полета и т.д.), устройство для расчета тяги в полете показанного примера использует алгоритм, такой как алгоритм 400 по ФИГ. 4. В дополнительном или альтернативном варианте реализации воздействие на полет также может быть использовано в этом вычислении.
[0057] Далее определяют, есть ли необходимость перевода автомата тяги в режим удержания (блок 710). В этом примере воздействие на полет сравнивают с вычисленным допустимым предельным значением перемещения рычага управления двигателем и/или диапазоном перемещения рычага управления двигателем. В частности, если воздействие на полет (например, изменение тяги вручную, инициирование автоматического режима и/или программы автопилота и т.д.) приведет к выходу летательного аппарата за пределы предпочтительного режима (например, к низкой Vss скорости, такой как Vss скорость 306), автомат тяги не будет иметь разрешения на перевод в режим удержания. Например, сравнение и/или анализ, проиллюстрированные графиком 300 управления тягой по ФИГ. 3, могут быть использованы для определения того, разрешено ли изменение состояния автомата тяги (например, отключение, выключение, удержание, активирование или изменение режима автомата тяги.).
[0058] Если автомат тяги не должен быть переведен в режим удержания (блок 710), управление процессом возвращают к блоку 702. Однако если автомат тяги должен быть переведен в режим удержания (блок 710), процесс переходит к блоку 712, в котором автомат тяги переводят в режим удержания (блок 712), и процесс оканчивают (блок 714).
[0059] Со ссылкой на ФИГ. 8 показан приведенный в качестве примера способ по ФИГ. 8, который начинают в блоке 800, когда летательный аппарат продолжает полет/ проявляет тенденцию к продолжению полета (например, с помощью интерполяции) с непредпочтительным параметром и/или с ухудшенными полетными характеристиками (например, выполнение маневра и/или изменение высоты) (блок 800). В этом примере режим автомата тяги должен быть автоматически изменен, когда летательный аппарат переходит в режим полета с непредпочтительным параметром и/или с ухудшенными рабочими характеристиками или продолжает полет с непредпочтительным и/или с ухудшенными рабочими характеристиками.
[0060] В некоторых примерах определяют состояние системы автомата тяги летательного аппарата (блок 802). Например, интерфейс воздействия на полет, такой как интерфейс 508 воздействия на полет, может быть использован для связи с находящимися в кабине органами управления летательного аппарата для определения факта включения системы автомата тяги, например.
[0061] В некоторых примерах автомат тяги переводят в режим удержания и/или выключают на основании приема воздействия на полет (например, ручной команды управления, инициирования автоматической программы полета и т.д.) (блок 804).
[0062] В этом примере вводимые полетные данные анализируют на основании параметров полета (блок 806). Например, вводимые полетные данные сравнивают с вычисленным предельным значением перемещения рычага управления двигателем в полете с использованием приведенного в качестве примера алгоритма 400 по ФИГ. 4. В дополнительном или альтернативном варианте реализации воздействие на полет сравнивают с заданной граничной скоростью/тягой (например, областью 312), относящейся к заданному предпочтительному параметру полета. Это сравнение может быть использовано для определения того, привело ли воздействие на полет к выходу рычага управления двигателем летательного аппарата за пределы заданных границ или области (областей) тяги/скорости.
[0063] Затем определяют, произвести ли изменение режима автомата тяги (блок 808). В этом примере режим автомата тяги автоматически изменяют на основании того, что принятые вводимые полетные данные перевели рычаг управления двигателем летательного аппарата в область ниже вычисленного предельного значения перемещения рычага управления двигателем. В дополнительном или альтернативном варианте реализации режим автомата тяги должен быть автоматически изменен на основании определения, что летательный аппарат проявляет тенденцию к отклонению к непредпочтительному параметру (например, быстрому подъему и/или уменьшению скорости, проявляет тенденцию к выходу из предпочтительного состояния полета), хотя параметр полета летательного аппарата еще стал непредпочтительным. Если режим автомата тяги не подлежит изменению (блок 808), управление процессом возвращают к блоку 802.
[0064] Однако, если необходимо изменить режим автомата тяги (блок 808), управление процессом переходит к блоку 810, в котором изменяют режим автомата тяги (блок 810). В некоторых примерах режим автомата тяги изменяют (например, изменяют автоматически) посредством преодоления режима удержания системы автомата тяги.
[0065] После изменения режима автомата тяги (блок 810) определяют, является ли параметр полета летательного аппарата предпочтительным (блок 812). Например, интерфейс датчиков, такой как интерфейс 506 полетных датчиков, используют для определения того, совершает ли летательный аппарат полет в пределах предпочтительного параметра полета (например, в пределах границ графика 300 управления полетом и/или использование алгоритма 400 обозначает, что летательный аппарат использует уровень рычага управления двигателем, выше вычисленного допустимого предельного значения перемещения рычага управления двигателем/угла датчика положения рычага управления двигателем). В альтернативном варианте реализации в некоторых примерах определяют, что параметр полета летательного аппарата является предпочтительным, если скорость летательного аппарата превосходит скорость срабатывания автомата тряски ручки управления, Vss (например, превосходит кратное значение, больше в 1,1-1,5 раза скорости срабатывания автомата тряски ручки управления).
[0066] Если параметр полета летательного аппарата не является предпочтительным (блок 812), управление процессом переходит к блоку 814, в котором режим автомата тяги сохраняют до тех пор, пока параметр полета летательного аппарата не будет предпочтительным (блок 814). В некоторых примерах предотвращают перевод автомата тяги в режим удержания до тех пор, пока летательный аппарат не достигнет предпочтительного параметра полета (например, предпочтительной скорости летательного аппарата, данной высоты и/или ориентации летательного аппарата). После достижения летательным аппаратом предпочтительного параметра полета управление процессом возвращают в блок 802.
[0067] В некоторых примерах, если параметр полета летательного аппарата является предпочтительным (блок 812), управление процессом переходит к блоку 816, в котором определяют, задействовать ли ручное управление системой автомата тяги в обход автоматики (блок 816). В частности, система автомата тяги показанного примера находится в режиме, в котором задействовано ручное управление системой автомата тяги в обход автоматики, пока летательный аппарат не проявляет тенденции к отклонению от предпочтительного параметра. Иными словами, режим удержания системы автомата тяги задействуют на основании того, что летательный аппарат не проявляет тенденции к отклонению от предпочтительного параметра. В этом примере, если ручное управление в обход автоматики необходимо задействовать по плану, включают ручное управление в обход автоматики (блок 817), и управление процессом переходит к блоку 802.
[0068] В альтернативном варианте реализации, если летательный аппарат проявляет тенденцию к отклонению от предпочтительного параметра полета, но параметр полета летательного аппарата все еще является предпочтительным, ручное управление системой автомата тяги в обход автоматики не задействуют (блок 816), и управление процессом переходит к блоку 814.
[0069] На ФИГ. 9 показана блок-схема приведенной в качестве примера процессорной платформы 900, выполненной с возможностью исполнения приведенных в качестве примера способов по ФИГ. 6-8, для реализации примера системы 500 управления тягой по ФИГ. 5. Процессорная платформа 900 может представлять собой, например, сервер, персональный компьютер, мобильное устройство (например, мобильный телефон, смартфон, планшет, такой как планшет iPad™), персональный цифровой помощник (PDA), Интернет-устройство, цифровой видеомагнитофон, телевизионную приставку или вычислительное устройство любого другого типа.
[0070] Процессорная платформа 900 показанного примера включает в себя процессор 912. Процессор 912 показанного примера выполнен в виде аппаратных средств. Например, процессор 912 может быть реализован посредством одной или более интегральных схем, логических схем, микропроцессоров или контроллеров любого необходимого бренда или изготовителя.
[0071] Процессор 912 показанного примера включает в себя локальную память 913 (например, кэш-память). В этом примере процессор 912 также включает в себя устройство 504 для расчета тяги в полете, интерфейс 506 полетных датчиков, интерфейс 508 воздействия на полет и систему 510 управления тягой летательного аппарата. Процессор 912 показанного примера имеет связь с основной памятью, включая энергозависимую память 914 и энергонезависимую память 916, посредством шины 918. Энергозависимая память 914 может быть реализована посредством синхронного динамического ОЗУ (SDRAM), динамического ОЗУ (DRAM), динамической памяти с произвольным доступом от компании RAMBUS (RDRAM) и/или посредством любого другого типа запоминающего устройства с произвольным доступом. Энергонезависимая память 916 может быть реализована посредством флэш-памяти и/или устройства памяти любого другого необходимого типа. Доступ к основной памяти 914, 916 управляется контроллером памяти.
[0072] Процессорная платформа 900 показанного примера также включает в себя интерфейсную схему 920. Интерфейсная схема 920 может быть реализована посредством стандарта интерфейса любого типа, такого как Ethernet интерфейс, универсальная последовательная шина (USB), и/или экспресс-интерфейс PCI.
[0073] В показанном примере, одно или более устройств 922 ввода соединены с интерфейсной схемой 920. Устройство (устройства) 922 ввода позволяет (позволяют) пользователю вводить данные и команды в процессор 912. Устройство (устройства) ввода может быть реализовано, например, посредством аудиодатчика, микрофона, камеры (камеры покадровой съемки или видео), клавиатуры, кнопки, мыши, сенсорного экрана, сенсорной площадки, шарового манипулятора, манипулятора типа isopoint и/или системы распознавания голоса.
[0074] Одно или более устройств 924 вывода также соединены с интерфейсной схемой 920 показанного примера. Устройства 924 вывода могут быть реализованы, например, посредством устройств отображения (например, светоизлучающего диода (LED), органического светоизлучающего диода (OLED), жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (CRT), сенсорного экрана, тактильного устройство вывода, принтера и/или динамиков). Интерфейсная схема 920 показанного примера, таким образом, обычно включает в себя карту с графическим драйвером, чип с графическим драйвером или процессор с графическим драйвером.
[0075] Интерфейсная схема 920 показанного примера также включает в себя устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевую интерфейсную плату для облегчения обмена данными с внешними устройствами (например, вычислительными устройствами любого типа) через сеть 926 (например, соединение Ethernet, цифровую абонентскую линию (DSL), телефонную линию, коаксиальный кабель, систему сотовой телефонии и т.д.).
[0076] Процессорная платформа 900 показанного примера также включает в себя одно или более запоминающих устройств 928 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 928 большой емкости включают дисководы гибких дисков, накопители на жестких магнитных дисках, приводы компакт-дисков, приводы компакт-дисков формата Blu-Ray, системы типа RAID на основе независимых дисковых накопителей с избыточностью и приводы компакт-дисков формата DVD.
[0077] Кодированные инструкции 932 по ФИГ. 6-8 могут быть сохранены в устройстве 928 для хранения большой емкости, в энергозависимой памяти 914, в энергонезависимой памяти 916 и/или на съемном материальном компьютерочитаемом носителе данных, таком как диск CD или диск DVD.
[0078] Из вышеизложенного следует понимать, что приведенные выше описанные способы, устройство и изделия обеспечивают возможность автоматического управления системами управления тягой для автоматического поддержания летательного аппарата в предпочтительном состоянии и/или улучшают рабочие характеристики летательного аппарата. Примеры, раскрытые в настоящем документе, позволяют автоматическим средствам и/или системам управления диапазоном перемещения рычага управления двигателем предотвращать выход рычага управления двигателем за пределы рассчитанного предпочтительного диапазона его перемещения. Примеры, раскрытые в настоящем документе, также позволяют системе не допускать перехода системы автомата тяги в режим удержания/управления в обход автоматики на основании параметров полета и/или воздействия на полет. Примеры, раскрытые в настоящем документе, обеспечивают автоматическое изменение режима системы автоматического управления тягой для предотвращения перехода летательного аппарата в непредпочтительное состояние.
[0079] Хотя в настоящем документе раскрыты определенные приведенные в качестве примера способы, устройства и изделия, объем охвата данного патента не ограничивается ими. Напротив, настоящий патент включает в себя все способы, устройства и изделия, явно попадающие в объем формулы изобретения этого патента. Хотя примеры, раскрытые в настоящем документе, относятся к летательному аппарату, раскрытые примеры могут быть применены к любым транспортным средствам, космическим летательным аппаратам, погружным средствам и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757549C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЯГОЙ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2009 |
|
RU2406849C1 |
| СИСТЕМА С УСТРОЙСТВОМ АВИАЦИОННОЙ ЭЛЕКТРОНИКИ И НАЗЕМНОЙ СТАНЦИЕЙ ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ОТКЛОНИВШИМСЯ ОТ МАРШРУТА, И ДЛЯ АВАРИЙНОЙ СВЯЗИ | 2003 |
|
RU2318243C2 |
| СИСТЕМА АВТОМАТИЗАЦИИ РАБОТЫ ЛЕТНОГО ЭКИПАЖА | 2017 |
|
RU2732646C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2653417C1 |
| СИСТЕМА ВЫЧИСЛИТЕЛЬНОГО ОКРУЖЕНИЯ ДЛЯ МОНИТОРИНГА ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2800105C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИМЕНЕНИЯ РЕВЕРСОРОВ ТЯГИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2449153C1 |
| УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ОБЪЕКТА, ИМЕЮЩЕГО ЭЛЕКТРОННУЮ СИСТЕМУ МОНИТОРИНГА ФУНКЦИОНАЛЬНЫХ ПАРАМЕТРОВ | 1994 |
|
RU2050016C1 |
| МАЛОЗАМЕТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2722609C1 |
Группа изобретений относится к способу и системе автоматического управления тягой в полете, способу управления автоматом тяги летательного аппарата, материальному машиночитаемому носителю. Для автоматического управления тягой в полете вычисляют угол датчика положения рычага управления двигателя определенным образом, управляют рычагом управления двигателем для поддержания предпочтительного режима полета летательного аппарата. Для управления автоматом тяги производят анализ принятого воздействия на полет, включают автомат тяги в режиме удержания при определении того, что это воздействие не приведет к отклонению от предпочтительного состояния полета летательного аппарата. Материальный машиночитаемый носитель содержит сохраненные на нем инструкции для реализации вышеуказанных способов. Устройство содержит датчик для определения параметра полета, процессор, электромеханический механизм для управления рычагом управления двигателем. 4 н. и 18 з.п. ф-лы, 9 ил.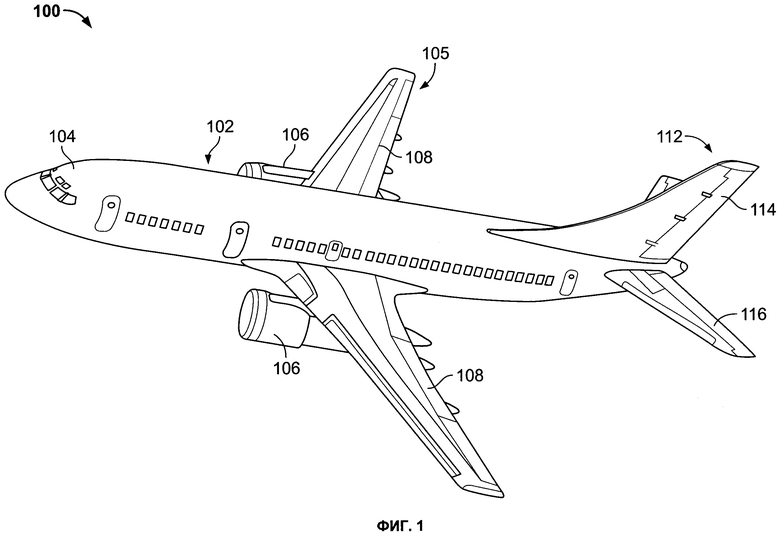
1. Способ автоматического управления тягой в полете, включающий:
вычисление, с использованием процессора, угла датчика положения рычага управления двигателем на основании параметра полета летательного аппарата и
управление рычагом управления двигателем с предотвращением его перемещения за пределы угла датчика положения рычага управления двигателем и/или диапазона, заданного углом датчика положения рычага управления двигателем, для поддержания предпочтительного режима полета летательного аппарата.
2. Способ по п. 1, согласно которому вычисление угла датчика положения рычага управления двигателем также основано на выбранном автоматическом режиме летательного аппарата.
3. Способ по п. 1 или 2, согласно которому параметр полета включает по меньшей мере один из таких параметров, как скорость, тангаж, рыскание, крен или высота летательного аппарата.
4. Способ по п. 1, или 2, или 3, согласно которому вычисление угла датчика положения рычага управления двигателем основано на области, заданной диапазонами скорости и тяги.
5. Способ по п. 1, или 2, или 3, или 4, согласно которому управление рычагом управления двигателем включает ограничение диапазона перемещения рычага управления двигателем.
6. Способ по п. 5, согласно которому ограничение для рычага управления двигателем включает ограничение рычага управления двигателем электромеханическими средствами.
7. Способ по п. 1, или 2, или 3, или 4, или 5, согласно которому управление рычагом управления двигателем включает предотвращение перевода системы автомата тяги в режим удержания.
8. Способ по п. 1, или 2, или 3, или 4, или 5, или 7, согласно которому предпочтительный режим полета включает поддержание скорости летательного аппарата на значении, превышающем скорость срабатывания автомата тряски ручки управления летательного аппарата.
9. Способ управления автоматом тяги летательного аппарата, включающий:
анализ, с использованием процессора, принятого воздействия на полет и по меньшей мере одного параметра полета для определения того, приведет ли это воздействие на полет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета; и
включение автомата тяги в режиме удержания при определении, что это воздействие на полет не приведет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета.
10. Способ по п. 9, также включающий автоматическое изменение режима автомата тяги при определении, что это воздействие на полет приведет к переводу летательного аппарата в состояние, отличное от предпочтительного состояния полета.
11. Способ по п. 9 или 10, также включающий автоматическое изменение режима автомата тяги с его переводом из режима удержания в другой режим на основании того, когда летательный аппарат проявляет тенденцию к выходу из предпочтительного состояния полета.
12. Способ по п. 9, или 10, или 11, также включающий управление уровнем рычага управления двигателем с превышением угла датчика положения рычага управления двигателем, причем угол датчика положения рычага управления двигателем основан на области, заданной диапазонами скорости и тяги.
13. Способ по п. 9, или 10, или 11, или 12, согласно которому предпочтительное состояние полета включает скорость, превышающую скорость срабатывания автомата тряски ручки управления летательного аппарата.
14. Материальный машиночитаемый носитель, имеющий сохраненные на нем инструкции, которые при их исполнении побуждают процессор:
определять, что воздействие на полет летательного аппарата приведет к непредпочтительному параметру полета летательного аппарата; и
на основании произведенного определения изменять режим автомата тяги летательного аппарата для поддержания предпочтительного параметра полета летательного аппарата.
15. Машиночитаемый носитель, имеющий сохраненные на нем инструкции, по п. 14, которые при их исполнении также побуждают процессор производить вычисление допустимого предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем.
16. Машиночитаемый носитель, имеющий сохраненные на нем инструкции, по п. 15, которые при их исполнении также побуждают процессор управлять электромеханической системой для предотвращения перемещения рычага управления двигателем за пределы указанного допустимого предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем.
17. Машиночитаемый носитель, имеющий сохраненные на нем инструкции, по п. 14 или 15, в котором указанное воздействие на полет включает в себя команду на выполнение автоматической программы полета.
18. Машиночитаемый носитель, имеющий сохраненные на нем инструкции, по п. 14, или 15, или 17, в котором процессор выполнен с возможностью определения того, что летательный аппарат проявляет тенденцию к отклонению от предпочтительного параметра полёта, с определением того, что указанное воздействие на полет приведет к непредпочтительному параметру полета летательного аппарата.
19. Устройство автоматического управления тягой в полете, содержащее:
датчик летательного аппарата для определения параметра полета летательного аппарата;
процессор для вычисления предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем на основании указанного параметра полета для поддержания предпочтительного параметра полета летательного аппарата; и
электромеханический механизм для управления рычагом управления двигателем с предотвращением его перемещения за пределы предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем.
20. Устройство по п. 19, в котором процессор выполнен с возможностью вычисления указанного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем посредством сравнения воздушной скорости летательного аппарата с областью, заданной диапазонами скорости и тяги.
21. Устройство по п. 19 или 20, в котором процессор выполнен с возможностью вычисления указанного предельного значения перемещения рычага управления двигателем и/или диапазона перемещения рычага управления двигателем также на основании воздействия на полет.
22. Устройство по п. 21, в котором процессор выполнен с возможностью включения или выключения режима удержания системы автоматического управления тягой летательного аппарата на основании указанного воздействия на полет.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2325304C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU1707896C |
| US 20050151672 A1, 14.07.2005 | |||
| US 0008195346 B1, 05.06.2012 | |||
| WO 2001089926 A2, 29.11.2001 | |||
| US 0007711455 B1, 04.05.2010. | |||

