Изобретение касается способа и системы для устранения насыщения инерционных колес космического аппарата. В частности, оно применяется в области спутников или межпланетных зондов, которые, независимо от своей траектории или орбиты, должны сохранять точную ориентацию, называемую пространственным положением, для обеспечения в соответствии с их задачами хорошей ориентации их антенн, солнечных панелей и установленных на борту научных инструментов.
Как правило, пространственным положением, то есть угловой ориентацией космического аппарата, такого как спутник или зонд, на заранее определенной траектории управляют при помощи внутренних приводов, таких как инерционные колеса, позволяющие действовать на космический аппарат внутренним моментом сил и обеспечивать вращение вокруг одной из его осей X, Y, Z, при этом оси X, Y, Z образуют базовую систему координат, связанную с космическим аппаратом. Однако космический аппарат стремится изменить наведение под действием возмущающих моментов сил, создаваемых окружающей средой, такой как солнечное давление, аэродинамические силы трения, электромагнитные моменты, моменты, связанные с гравитационным градиентом. Поэтому необходимо активно управлять угловой ориентацией космического аппарата и обеспечивать стабильность этой ориентации по его трем осям. Управление положением осуществляют постоянно при помощи системы автоматического контроля, содержащей датчики, которые измеряют ориентацию космического аппарата, бортовой вычислитель, который обрабатывает эти измерения и вырабатывает команды, которые исполняются одним или несколькими приводами для уравновешивания отклонений и удержания ориентации в выбранном направлении. Однако, каждый раз, когда колеса создают внутренний момент сил, их скорость повышается и достигает максимальной скорости, называемой скоростью насыщения. При достижении максимальной скорости инерционные колеса уже не могут осуществлять компенсацию отклонений, и в этом случае бортовой вычислитель запускает операцию устранения насыщения колес (на английском языке: wheels unloading).
Как правило, устранение насыщения колес осуществляют, используя внешние дополнительные приводы, прикладывающие к космическому аппарату внешний момент, выбираемый таким образом, чтобы снизить скорость колес, пока они не достигнут своей первоначальной скорости.
Для осуществления устранения насыщения инерционных колес, как известно, используют магнитные балансиры (на английском языке: magneto torquer bar), которые за счет взаимодействия с земным магнитным полем создают магнитный момент для снижения скорости колес. Эти внешние приводы хорошо работают в случае космических аппаратов, находящихся на низкой орбите LEO (на английском языке: Low Earth Orbit) вокруг планеты с магнитосферой, такой как Земля, при высотах, как правило, до 2000 км в случае Земли, так как интенсивность земного магнитного поля является высокой возле планеты, но они работают хуже на более значительных высотах. Кроме того, на экваториальной земной орбите плоскостью орбиты является плоскость земного экватора, и ось магнитного поля почти перпендикулярна к плоскости орбиты. Поскольку вдоль оси магнитного поля нельзя получить магнитный момент, некоторые отклонения спутника невозможно компенсировать при помощи этих приводов.
На большой высоте или на геостационарной орбите GEO (на английском языке: Geosynchronous Earth Orbit), как известно, используют ракетные двигатели малой тяги (на английском языке: thruster) для устранения насыщения инерционных колес. Ракетные двигатели малой тяги позволяют создавать внешний момент за счет выброса реактивных газовых струй. Однако недостатком ракетных двигателей малой тяги является смещение космического аппарата во вращении, а также в поступательном движении, что нарушает орбиту космического аппарата, создает много вибраций и приводит к потерям наведения. Кроме того, поскольку, как правило, ракетные двигатели малой тяги устанавливают на одной из сторон космического аппарата, необходимо поворачивать космический аппарат для правильного ориентирования ракетных двигателей малой тяги во время операции устранения насыщения инерционных колес. Наконец, использование ракетных двигателей малой тяги для устранения насыщения колес приводит к дополнительному расходу топлива, тогда как инерционные колеса питаются электричеством при помощи солнечной энергии, захваченной солнечными панелями, которыми оборудован космический аппарат.
Настоящее изобретение призвано решить эти проблемы и предложить новый способ устранения насыщения инерционных колес космического аппарата, в котором устранение насыщения осуществляется автоматически, не требует дополнительных внешних приводов, позволяет экономить запасы топлива и, таким образом, позволяет упростить и снизить массу и стоимость космического аппарата.
Для этого объектом изобретения является способ устранения насыщения инерционных колес космического аппарата, при этом космический аппарат содержит три оси координат X, Y, Z, при этом ось Z соответствует направлению наведения, и космический аппарат обладает способностью накапливать внутренний кинетический момент в колесах до максимального значения насыщения, отличающийся тем, что он состоит в том, что для устранения насыщения космического аппарата по трем осям X, Y, Z направление накопления кинетического момента в колесах меняют на противоположное путем автоматического переворота космического аппарата вокруг оси Z, при этом направление наведения остается фиксированным.
Предпочтительно способ состоит в том, что:
- выбирают пороговое значение Hs запуска устранения насыщения колес и базисный вектор 
- периодически измеряют угловую скорость каждого инерционного колеса,
- для каждого измерения скорости вычисляют вектор 

- сравнивают накопленный кинетический момент Hi с пороговым значением Hs,
- когда накопленный кинетический момент Hi больше порогового значения Hs, принимают решение о запуске маневра переворота, обеспечивающего устранение насыщения колес, затем запускают автоматический маневр переворота космического аппарата при вращении на заранее определенный угол вокруг оси Z, при этом направление наведения остается фиксированным.
Факультативно решение о запуске маневра переворота, обеспечивающего устранение насыщения колес, принимают, если Hi возрастает между двумя последовательными измерениями.
Предпочтительно, пороговое значение Hs меньше максимального значения насыщения.
Предпочтительно, угол переворота при вращении равен 180°.
Предпочтительно, маневр переворота при вращении можно производить, когда космический аппарат находится в заранее определенном положении на своей траектории. Например, заранее определенное положение может соответствовать прохождению космического аппарата над земной географической зоной с низкой плотностью населенности или прохождению космического аппарата в зоне ночного времени.
Предпочтительно, маневр переворота при вращении космического аппарата осуществляют при помощи, по меньшей мере, одного инерционного колеса.
Объектом настоящего изобретения является также система устранения насыщения инерционных колес космического аппарата, содержащего, по меньшей мере, одно инерционное колесо, при этом космический аппарат обладает способностью накапливать внутренний кинетический момент в колесе до максимального значения насыщения, отличающаяся тем, что содержит средства для запуска автоматического маневра переворота космического аппарата при вращении на определенный угол вокруг оси Z, соответствующей направлению наведения, при этом направление наведения остается фиксированным, при этом угол выбирают таким образом, чтобы изменить на противоположное направление накопления кинетического момента в колесах.
Предпочтительно, система дополнительно содержит, по меньшей мере, один датчик скорости, установленный на инерционном колесе, средства вычисления внутреннего кинетического момента, накопленного инерционным колесом, соответствующего измеренной скорости, средства сравнения кинетического момента колеса с предварительно выбранным пороговым значением запуска устранения насыщения колес, средства принятия решения о запуске маневра переворота, обеспечивающего устранение насыщения колеса, когда значение кинетического момента колеса больше порогового значения.
Наконец, объектом изобретения является также космический аппарат, содержащий, по меньшей мере, одно инерционное колесо и ось Z, соответствующую направлению наведения, и систему устранения насыщения инерционного колеса.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и не ограничительного примера, со ссылками на прилагаемые схематические чертежи, на которых:
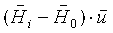
фиг.1 - схематичный вид в перспективе примера космического аппарата в соответствии с настоящим изобретением;
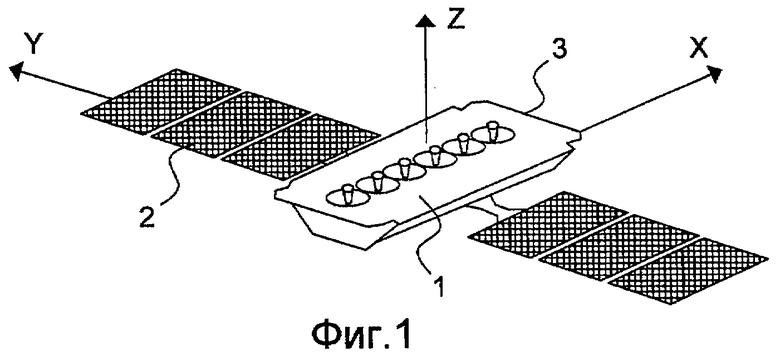
фиг.2 - схематичный вид в перспективе примера космического аппарата, выведенного на экваториальную орбиту вокруг планеты, в соответствии с настоящим изобретением;
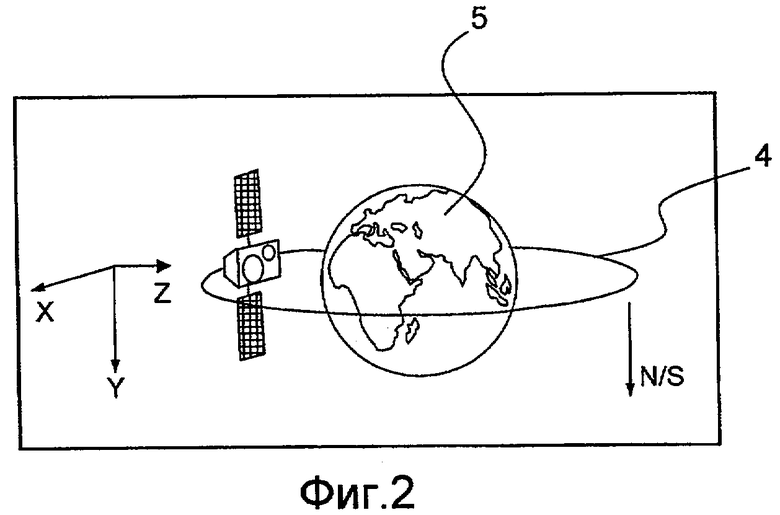
фиг.3 - схема расположения инерционных колес в космическом аппарате;
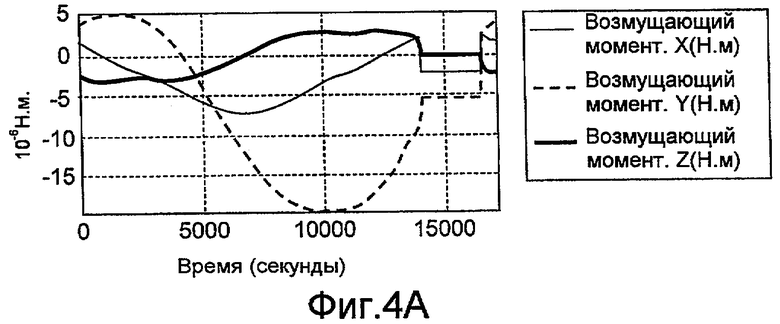
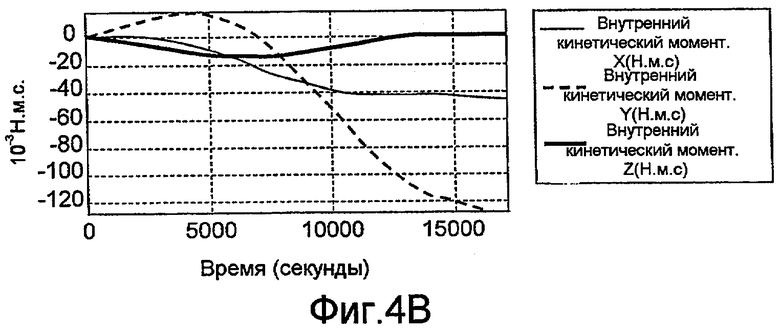
фиг.4A и 4B - пример изменения в зависимости от времени возмущающих моментов по осям X, Y, Z и их влияние на кинетический момент, накопленный инерционными колесами во время орбитального периода;
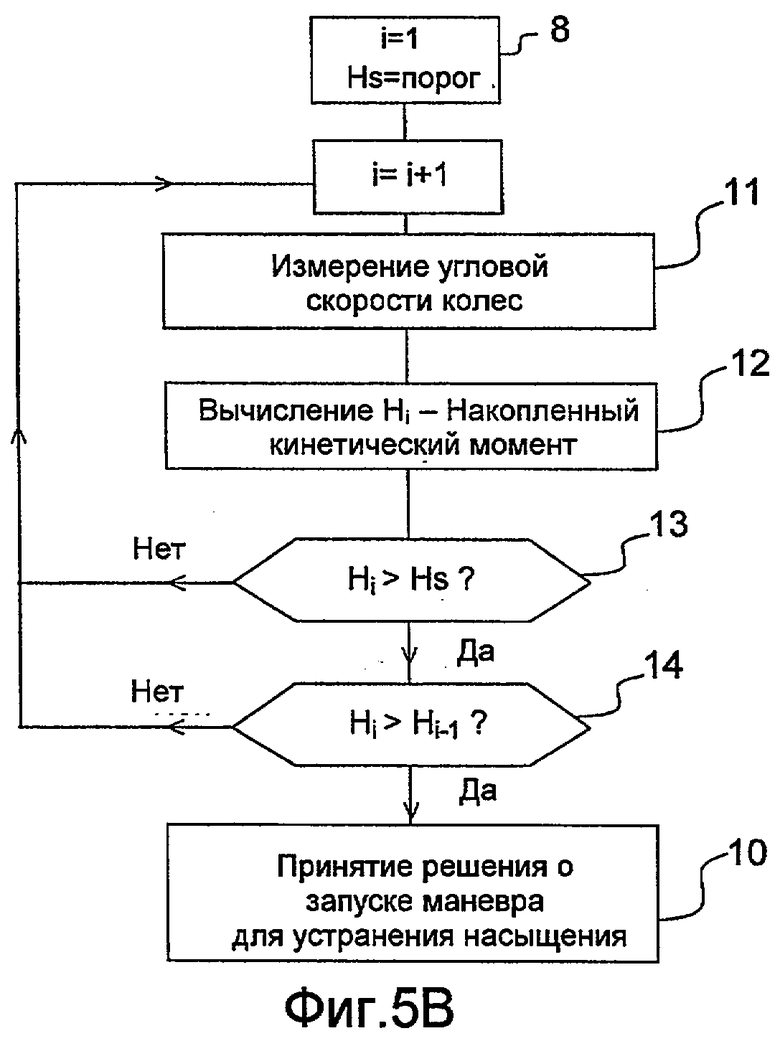
фиг.5A и 5B - две блок-схемы основных этапов способа устранения насыщения инерционных колес космического аппарата в соответствии с настоящим изобретением;
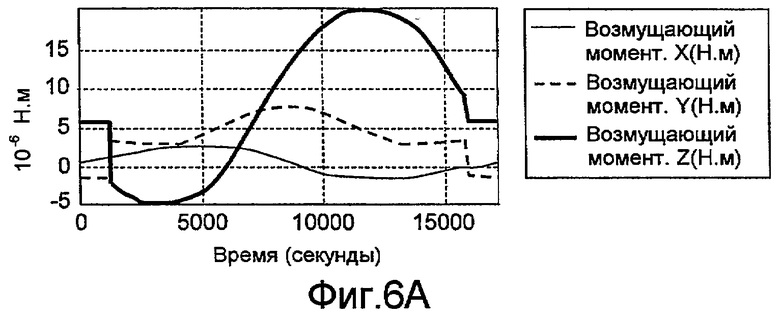
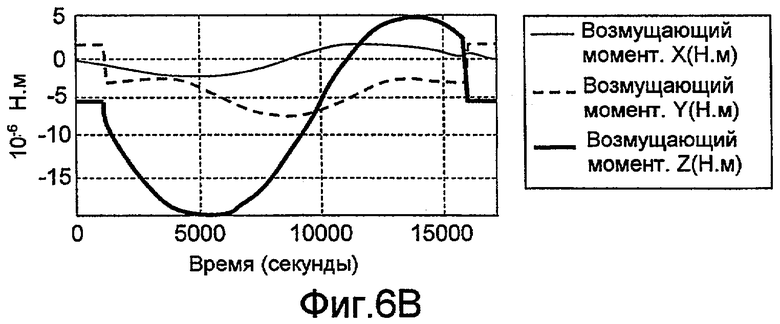
фиг.6A и 6B - пример изменения в зависимости от времени возмущающих моментов по осям X, Y, Z до и после переворота при вращении космического аппарата в соответствии с настоящим изобретением;
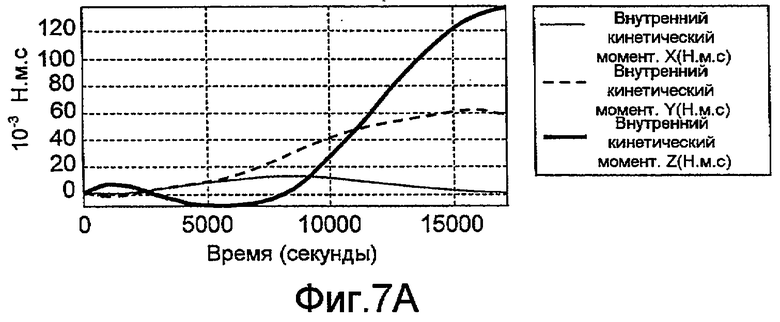
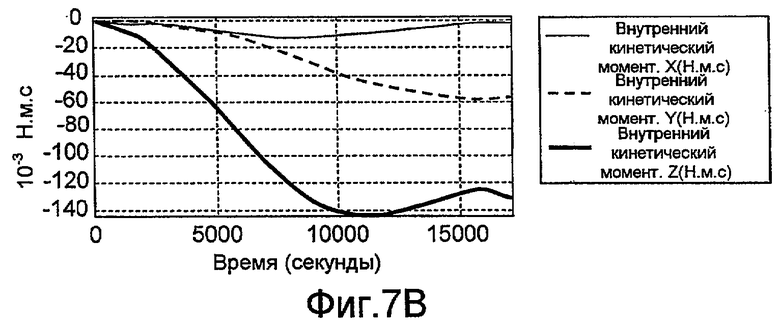
фиг.7A и 7B - пример изменения кинетического момента, накопленного колесами, до и после переворота при вращении космического аппарата в соответствии с настоящим изобретением;
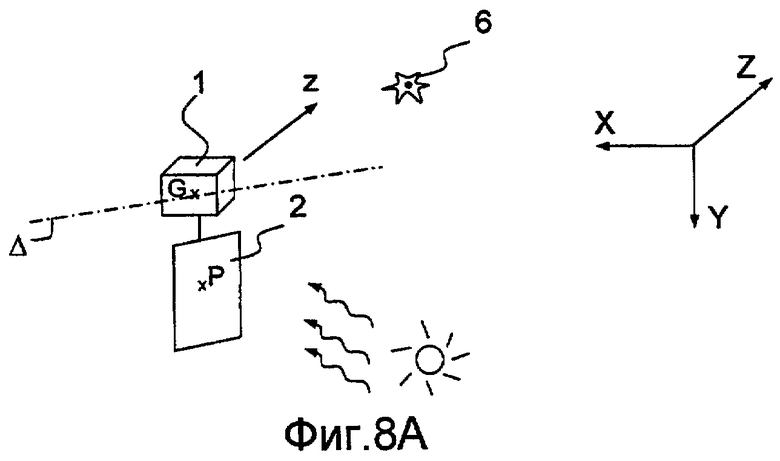
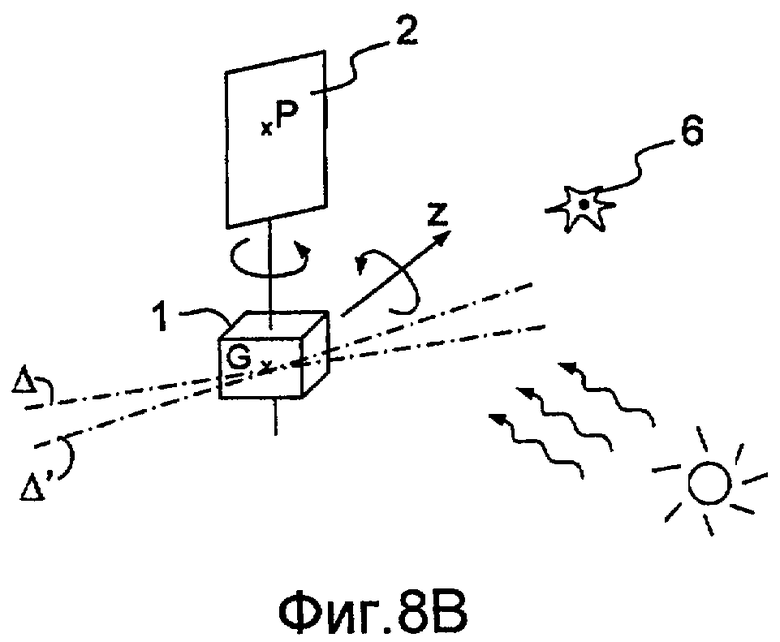
фиг.8A и 8B - второй пример применения способа в соответствии с настоящим изобретением для устранения насыщения колес космического аппарата в космическом пространстве.
На фиг.1 показан пример космического аппарата, например, телекоммуникационного спутника, содержащего платформу 1, оборудованную солнечными панелями 2 и полезной нагрузкой, содержащей приемопередающие антенны 3. Космический аппарат содержит три оси X, Y, Z, образующие базовую систему координат космического аппарата. На фиг.1 ось Х может соответствовать направлению полета по заранее определенной траектории, например, такой как орбита вокруг Земли, как показано, например, на фиг.2, ось Y имеет направление север/юг, ось Z рыскания является ортогональной к плоскости, образованной осями Х и Y, и соответствует направлению наведения. Солнечные панели 2 ориентированы в направлении оси Y, и антенны 3 ориентированы по оси Z рыскания, например, в направлении Земли или какой-либо звезды. Космический аппарат содержит, по меньшей мере, три инерционных колеса 4, называемые также реактивными колесами, как показано, например, на фиг.3. Как правило, инерционные колеса интегрированы в корпус спутника, например, в платформу 1. Для создания реактивного момента по трем осям X, Y, Z и обеспечения стабильности угловой ориентации космического аппарата необходимо наличие трех колес. Добавление четвертого колеса является избыточным, и оно используется в случае выхода из строя одного из колес или для того, чтобы предотвращать, чтобы колеса не достигли нулевой скорости, что иногда может создавать возмущения при наведении спутника. Во время маневров, осуществляемых для коррекции отклонения пространственного положения космического аппарата, колеса 4 создают внутренний момент, который может повышать их скорость вращения и, следовательно, увеличивать их накопленный кинетический момент.
Кроме того, маневр при вращении спутника при помощи колес временно отбирает скорость у колес между началом и концом маневра. Чтобы заставить спутник повернуться, колеса заряжаются кинетическим моментом, который, согласно закону сохранения кинетического момента, передается на корпус спутника.
На фиг.4A и 4B, соответственно, показан пример изменения в зависимости от времени возмущающих моментов вдоль осей X, Y, Z и их влияния на кинетический момент, накопленный инерционными колесами 4 во время орбитального периода. В этом примере космическим аппаратом является спутник, выведенный на земную экваториальную орбиту на средней высоте в пределах от 2000 км до 36000 км. На этих высотах основными возмущающими моментами, влияющими на пространственное положение космического аппарата, являются моменты, связанные с солнечным давлением, и моменты, связанные с гравитационным градиентом. Например, на высоте 8000 км моментами, связанными с атмосферным трением, можно пренебречь.
Кроме того, остаточный магнитный момент не имеет никакого влияния на кинетический момент, накапливаемый инерционными колесами, так как он в среднем компенсируется во времени. На этих фигурах показано, что в силу солнечного давления возмущения изменяются вдоль всей орбиты в зависимости от ориентации спутника относительно солнца, и что составляющие внутреннего кинетического момента по осям X, Y, Z увеличились после одного витка на орбите. Кроме того, когда Земля закрывает Солнце по отношению к спутнику, то есть от 14000 секунд до 16000 секунд на показанных кривых, солнечное давление больше не действует, и возмущающие моменты, связанные с гравитационным градиентом, являются практически постоянными. Изменения направления действия внутреннего кинетического момента связаны с обменом кинетического момента между осями спутника в силу его вращения вокруг оси Y (север/юг). Это вращение связано с наведением спутника в направлении Земли.
На фиг.5A и 5B показаны две блок-схемы основных этапов способа устранения насыщения инерционных колес 4 космического аппарата в соответствии с настоящим изобретением. Для лучшего понимания изобретения способ описан на примере космического аппарата на орбите вокруг планеты, такой как Земля, при этом его антенны имеют направление наведения, соответствующее оси Z рыскания.
На первом этапе 10 принимается решение о запуске маневра с целью устранения насыщения инерционных колес на основании измерений 11 угловых скоростей каждого инерционного колеса, при этом измерения осуществляют периодически. На этом этапе ось Z рыскания удерживается фиксированной. Во время первой итерации i=1 на предварительном этапе 8 выбирают пороговое значение Hs запуска устранения насыщения колес и базисный вектор
Если космическим аппаратом является спутник на орбите вокруг планеты, измерения скорости можно производить, например, на каждом витке орбиты.
В этом случае на каждом витке орбиты датчики скорости, установленные на каждом инерционном колесе, измеряют угловую скорость Ω колес. Данные измерения угловых скоростей Ω передаются на бортовой вычислитель, который на основании измерений скорости Ω при каждой итерации i вычисляет вектор

Базисный вектор
Решение о запуске маневра для устранения насыщения колес принимает бортовой вычислитель следующим образом. Он сравнивает значение Hi накопленного кинетического момента, по меньшей мере, по одной оси с пороговым значением Hs запуска устранения насыщения. В этом случае осуществляют тест 13, чтобы определить, является ли значение Hi больше порогового значения Hs. Факультативно можно также произвести второй тест 14, чтобы определить, является ли накопленный кинетический момент Hi возрастающим Hi>Hi-1. Если тест 13 и, в случае необходимости, тест 14 дают положительный результат, принимается решение о запуске маневра переворота для обеспечения устранения насыщения колес. Если результат теста 13 и, в случае необходимости, теста 14 является отрицательным, производят инкрементацию способа для следующей итерации с новым измерением угловой скорости инерционных колес. Пороговое значение Hs является значением, заранее определенным в зависимости от допустимого диапазона изменения внутреннего кинетического момента. Выбор порогового значения зависит от максимальной способности инерционных колес накапливать кинетический момент, от ориентации колес в космическом аппарате, от требуемого среднего внутреннего кинетического момента на уровне спутника, от пределов изменения кинетического момента, например, связанных с маневрами и с управлением пространственным положением космического аппарата, и является результатом компромисса, который состоит в том, чтобы не производить устранение насыщения слишком часто, но запускать его при этом достаточно заблаговременно, чтобы колеса не достигали своего значения насыщения.
Второй этап 20 является факультативным. Он состоит в разрешении запуска маневра для устранения насыщения колес, когда положение космического аппарата на его орбите приходит в допустимый диапазон маневра. Согласно изобретению маневр для устранения насыщения колес состоит в осуществлении переворота при вращении (на английском языке: yaw flip) космического аппарата на заранее определенный угол вокруг оси Z рыскания, при этом ось Z рыскания остается фиксированной.
Этот переворот вокруг оси Z или вокруг оси, близкой к оси Z, позволяет устранить насыщение колес в трех направлениях пространства. В частности, переворот вокруг оси Z позволяет полностью решить первоначальную проблему устранения насыщения оси Y, соответствующей направлению север/юг, параллельному земному магнитному полю. Однако может оставаться определенный остаточный кинетический момент, который потенциально может со временем увеличиваться. Предпочтительно, для устранения этого остаточного кинетического момента систему устранения насыщения колес в соответствии с настоящим изобретением можно дополнить дополнительной системой устранения насыщения, например, магнитной системой устранения насыщения. Когда космический аппарат находится на орбите вокруг планеты, угол переворота при вращение предпочтительно равен или приблизительно равен 180°, что соответствует развороту космического аппарата таким образом, чтобы моменты, прикладываемые паразитными полями на космический аппарат до и после переворота при вращении, имели противоположные направления, и чтобы их влияние постепенно уравновешивалось, как показано на фиг.6A и 6B. Таким образом, этот переворот при вращении позволяет снизить угловую скорость инерционных колес вплоть для ее первоначального значения, и кинетический момент, накопленный колесами на уровне космического аппарата до переворота при вращении космического аппарата, постепенно компенсируется после переворота при вращении, как показано на фиг.7A и 7B. На фиг.7A, соответственно 7B, показано накопление кинетического момента колесами по 3 осям спутника во время орбитального периода, и это накопление происходит в результате действия возмущающих моментов, показанных на фиг.6A, соответственно 6B, до и соответственно после переворота на 180° вокруг оси Z спутника. За время 16000 секунд, соответствующее орбитальному периоду, составляющие внутреннего кинетического момента, показанные на фиг.7A, становятся противоположными и равными по модулю составляющим, показанным на фиг.7B.
Однако во время переворота космического аппарата возникает опасность нарушения наведения антенн и ухудшения качества передачи данных. Если космический аппарат является спутником на земной орбите, например, таким как телекоммуникационный спутник, ухудшение скорости передачи данных может иметь значительные последствия. Чтобы ограничить эти последствия, предпочтительно переворот при вращении космического аппарата разрешается, когда положение космического аппарата на его орбите соответствует зоне над малонаселенной географической зоной или приходится на ночное время, когда потребность в связи снижается. В этом случае ось Z рыскания космического аппарата остается неподвижной, и космический аппарат продолжает двигаться по своей орбите в ожидании перехода в допустимый диапазон маневра. Когда космический аппарат приходит в допустимый диапазон, вычислитель подает команду на переворот при вращении космического аппарата.
Третий этап 30 относится к осуществлению маневра переворота при вращении. Ось Z рыскания космического аппарата остается неподвижной и направлена в сторону Земли, тогда как космический аппарат поворачивается вокруг оси Z рыскания или вокруг оси, близкой к оси рыскания, на заранее определенный угол, предпочтительно равный 180° или близкий к 180°, вплоть до завершения маневра. Предпочтительно, маневр переворота при вращении происходит за счет инерционных колес и не требует дополнительных приводов. Во время маневра переворота при вращении внутренний кинетический момент в колесах изменяется за счет изменения скоростей колес, но общий кинетический момент комплекса, образованного спутником и колесами, остается постоянным в инерциальной системе координат, и происходит только обмен кинетического момента между колесами. Внутренний кинетический момент в колесах, выраженный в инерциальной системе координат, является практически одинаковым до и после маневра переворота.
После завершения маневра переворота при вращении способ в соответствии с настоящим изобретением возвращается на этап 10 для возобновления нового цикла отслеживания угловой скорости инерционных колес космического аппарата и, в случае необходимости, маневров устранения насыщения. Автоматический разворот спутника во время каждого маневра устранения насыщения позволяет возмущающим внешним моментам, таким как солнечное давление и гравитационный градиент, менять среднюю скорость инерционных колес в первом направлении, затем во втором направлении, противоположном первому направлению, за счет чего скорость инерционных колес остается ниже порога насыщения.
На фиг.8A и 8B показан второй пример применения способа устранения насыщения колес для космического аппарата, находящегося в каком-либо месте космического пространства, например, спутника при инерциальном наведении. Спутник может быть наведен, например, на звезду из зоны пространства, находящейся в точке Лагранжа L2. Спутник имеет центр тяжести G и точку Р, соответствующую центру приложения солнечного давления, и содержит платформу 1 и солнечную панель 2. Продольной осью солнечной панели является, например, ось Y, осью наведения является ось Z, и ось Х является ортогональной к плоскости YZ. Поскольку спутник, на который действует солнечное давление, содержит только одну солнечную панель, при этом центр приложения солнечного давления смещен относительно центра тяжести, он оказывается неуравновешенным и накапливает большой кинетический момент в колесах вдоль оси Δ, соответствующей оси солнечного момента. Для устранения насыщения колес способ в соответствии с настоящим изобретением состоит в перевороте спутника вокруг оси наведения Z и изменении на противоположное направления накапливания кинетического момента в колесах. Предпочтительно, угол переворота равен 180°. После переворота кинетический момент накапливается вдоль оси Δ', которая немного отличается от оси Δ в силу смещения центра приложения солнечного давления относительно центра тяжести спутника. Если ось Δ совпадает с осью Δ', происходит полное устранение насыщения по трем осям X, Y, Z. Если между двумя осями Δ и Δ' имеется смещение, как показано на фиг.8B, устранение насыщения происходит не полностью по трем осям X, Y, Z, и остается остаточный кинетический момент в плоскости, образованной осями Δ и Δ', в основном вдоль оси Y в данном примере. В этом случае, хотя остаточный кинетический момент является незначительным по сравнению с накоплением вдоль средней оси, являющейся биссектрисой между Δ и Δ', предпочтительно добавляют дополнительную систему устранения насыщения, например, типа ракетного двигателя малой тяги.
Описание настоящего изобретения представлено для частного примера выполнения и, разумеется, ни в коем случае им не ограничивается, и может охватывать все технические эквиваленты описанных средств, а также их комбинации, если они не выходят за рамки изобретения.
Группа изобретений относится к управлению ориентацией космических аппаратов (КА) с помощью гиромаховичных исполнительных органов (ГИО) и, более конкретно, к разгрузке ГИО при их насыщении. При установлении факта насыщения ГИО принимается решение (10) о запуске маневра разгрузки. Разрешение (20) о запуске маневра принимается, когда положение КА на его орбите попадает в допустимую область маневра. Сам маневр (30) осуществляют путем поворота КА на некоторый угол (в частн., переворота КА на 180°) вокруг фиксированной оси наведения (Z). Поворот м.б. выполнен с помощью одного из ГИО. В результате маневра действующие на КА внешние возмущающие моменты меняют свое направление, становясь разгружающими. В дальнейшем описанная процедура м.б. повторена. Техническим результатом группы изобретений является экономия реактивного топлива КА и упрощение системы управления КА при сохранении его требуемой рабочей ориентации (по оси Z). 3 н. и 8 з.п. ф-лы, 13 ил.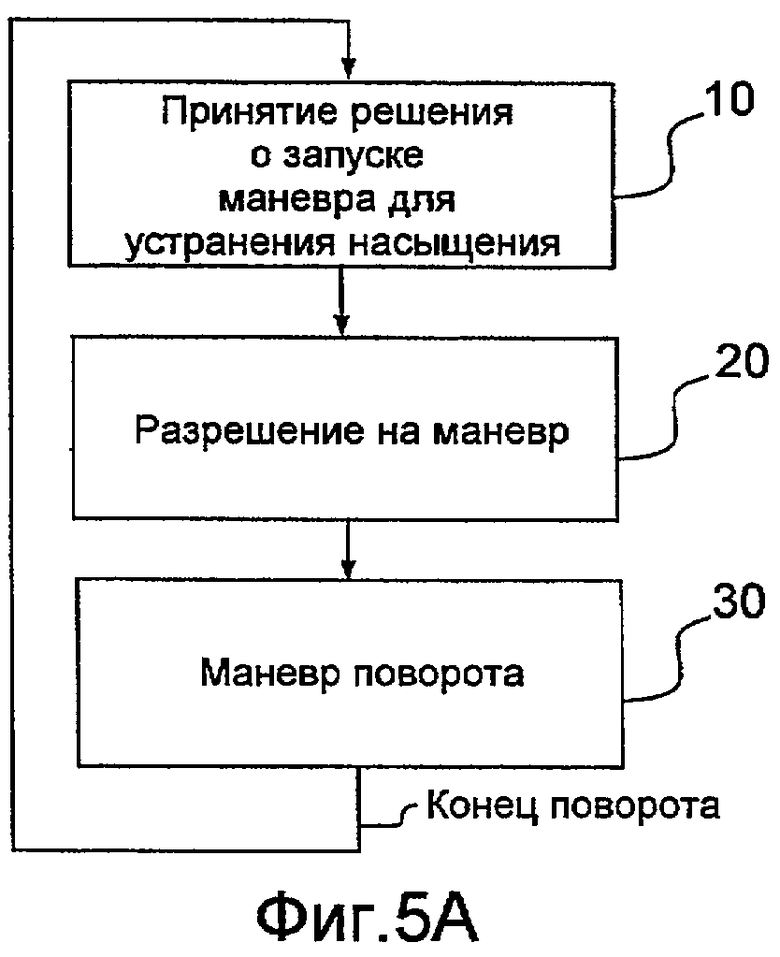
1. Способ устранения насыщения инерционных колес космического аппарата, при этом космический аппарат содержит три оси координат X, Υ, Z, при этом ось Ζ наведена в заранее определенном фиксированном направлении и каждое колесо космического аппарата обладает способностью накапливать кинетический момент до максимального значения насыщения, соответствующего максимальной угловой скорости, отличающийся тем, что он состоит в том, что, когда накопленный кинетический момент превышает пороговое значение, автоматически осуществляют переворот космического аппарата при вращении вокруг оси Ζ, при этом ось Ζ остается фиксированной, для снижения угловой скорости инерционных колес и снижения кинетического момента, накопленного колесами.
2. Способ по п. 1, отличающийся тем, что он состоит в том, что:
- выбирают пороговое значение Hs запуска устранения насыщения колес,
- периодически измеряют угловую скорость каждого инерционного колеса,
- для каждого измерения скорости вычисляют вектор  внутреннего кинетического момента и из него выводят накопленный кинетический момент Hi, равный модулю вектора внутреннего кинетического момента,
внутреннего кинетического момента и из него выводят накопленный кинетический момент Hi, равный модулю вектора внутреннего кинетического момента,
- сравнивают накопленный кинетический момент Hi с пороговым значением Hs,
- когда накопленный кинетический момент Hi больше порогового значения Hs, принимают решение (10) на запуск маневра переворота, обеспечивающего устранение насыщения колес, затем запускают автоматический маневр (30) переворота космического аппарата при вращении на заранее определенный угол вокруг оси Z, при этом направление оси Ζ остается фиксированным.
3. Способ по п. 2, отличающийся тем, что решение (10) о запуске маневра переворота принимают, если Hi возрастает между двумя последовательными измерениями.
4. Способ по п. 2, отличающийся тем, что пороговое значение Hs меньше максимального значения насыщения инерционных колес.
5. Способ по одному из пп. 1 или 2, отличающийся тем, что он заключается в том, что осуществляют переворот космического аппарата на угол, равный 180°, вокруг оси Z.
6. Способ по п. 2, отличающийся тем, что запуск маневра (30) переворота при вращении разрешают на предварительном этапе разрешения маневра переворота, обеспечивающего устранение насыщения (20), когда космический аппарат находится в заранее определенном положении на траектории.
7. Способ по п. 6, отличающийся тем, что заранее определенное положение соответствует прохождению космического аппарата над земной географической зоной с низкой плотностью населения или прохождению космического аппарата в зоне ночного времени.
8. Способ по п. 6, отличающийся тем, что маневр переворота (30) при вращении космического аппарата осуществляют при помощи, по меньшей мере, одного инерционного колеса.
9. Система устранения насыщения инерционных колес космического аппарата, содержащего три оси координат Χ, Υ, Z, при этом ось Ζ наведена в заранее определенном фиксированном направлении, по меньшей мере, одно инерционное колесо, при этом космический аппарат обладает способностью накапливать внутренний кинетический момент в колесе до максимального значения насыщения, отличающаяся тем, что содержит средства для запуска автоматического маневра переворота космического аппарата при вращении на заранее определенный угол вокруг оси Z, когда накопленный кинетический момент превышает пороговое значение, при этом направление оси Ζ остается фиксированным, при этом угол выбирают таким образом, чтобы снизить угловую скорость колеса.
10. Система устранения насыщения по п. 9, отличающаяся тем, что дополнительно содержит, по меньшей мере, один датчик скорости, установленный на инерционном колесе, средства вычисления кинетического момента Hi, накопленного инерционным колесом, соответствующего измеренной скорости, средства сравнения кинетического момента, накопленного колесом, с предварительно выбранным пороговым значением Hs запуска устранения насыщения колеса, средства принятия решения о запуске маневра переворота космического аппарата, когда значение кинетического момента, накопленного колесом, больше порогового значения.
11. Космический аппарат, содержащий, по меньшей мере, одно инерционное колесо и ось Z, наведенную в заранее определенном фиксированном направлении, отличающийся тем, что содержит систему устранения насыщения инерционного колеса по п. 9.
| Б.В.РАУШЕНБАХ, Е.Н.ТОКАРЬ | |||
| Управление ориентацией космических аппаратов | |||
| "Наука" | |||
| М | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Л.И | |||
| КАРГУ | |||
| Системы угловой стабилизации космических аппаратов | |||
| М | |||
| Машиностроение | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2001 |
|
RU2207969C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН СИСТЕМЫ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1980 |
|
SU1839928A1 |
| EP 1064591 B1, 10.09.2003 | |||
| US 6089508 A1, 18.07.2000 | |||
| US 20080035797 A1, 14.02.2008 | |||

