Изобретение относится к области радиолокации, в частности к радиолокационным средствам измерения параметров относительного движения космических аппаратов (КА), и может быть использовано при проектировании радиолокационной станции (РЛС) для сближения, стыковки с крупногабаритными космическими объектами (например, с международной космической станцией (МКС) и другими протяженными космическими объектами).
Обеспечение работы РЛС в условиях переотраженных сигналов является актуальной задачей. Например, специалистами РКК Энергия, в докладе Микрина Е.А., отмечается существенное влияние переотражений на точностные характеристики измеряемых параметров [1]. В частности, отмечается, что измеренные в навигационном приемном модуле (НПМ) векторы координат и скорости КА являются достаточно грубыми. Ошибки векторов положения составляют 20-30 м. Иногда, при сильных переотражениях сигналов навигационных спутников (НС) от элементов конструкции МКС, эта ошибка достигает 60-80 м, ошибки векторов скорости составляют величину 5-15 см/с, иногда, достигая величины ~1 м/с, что недопустимо при решении задач сближения и стыковки.
Аналогичные трудности возникают при использовании РЛС с синтезированной апертурой дистанционного зондирования Земли (ДЗЗ). Предлагаемое изобретение может быть использовано и в этой области.
При приеме сигнала в условиях наличия помех согласованный фильтр перестает быть оптимальным, и переходят к весовой обработке [5].
Сущность изобретения состоит в создании весовой функции (вектора), позволяющей подавлять мешающие переотраженные сигналы и получить максимальное отношение сигнал/шум по полезному сигналу. Полезные сигналы - это сигналы от многоточечной цели (например, от элементов конструкции МКС), которые несут нужную информацию о наблюдаемом объекте.
Предлагаемое изобретение дает возможность расширить область применения работы упомянутых РЛС, и работать как с кооперируемыми, так и с некооперируемыми космическими аппаратами (КА).
Применение весовой обработки, подразумевающее использование весовых функций (в т.ч. оконных функций), позволяет уменьшить как максимальный, так и интегральный уровень боковых лепестков отклика фильтра. Количество известных весовых функций с различными свойствами достаточно велико (окна Гаусса, Кайзера, Тейлора, Хемминга, Хеннинга и др.). Эти функции позволяют снизить уровень боковых лепестков отклика фильтра [2]. Наиболее эффективными с практической точки зрения оказались весовые функции Кайзера Wk(t) и Хемминга WX(t).
Как отмечается в [6], обобщенная характеристика зондирующего сигнала - «функция неопределенности» Вудворта, сравнительно полно описывающая влияние шумов на измерение времени задержки и частоты, подобна диаграмме направленности антенны в той же мере, в которой диаграмма направленности характеризует точность и разрешающую способность угловых измерений, как функция неопределенности характеризует точность и разрешающую способность измерений дальности и скорости.
Все эти характеристики существенно влияют на качество выполнения задач, и все они должны оптимизироваться совместно, с учетом взаимных влияний. Разумеется, в этом и состоит строго оптимальное проектирование. Но задачи подобного масштаба не случайно решаются обычно на основе инженерной интуиции, а не аналитических методов [6].
Существует и множество других весовых функций, все они берут начало в теории аппроксимации Чебышева. Однако, в [3] отмечено, что ни одна из, таким образом полученных функций не позволяет получить «оптимальную в минимаксном смысле аппроксимацию произвольной идеальной частотной характеристики, поскольку характеристика фильтра является результатом свертки частотных характеристик окна и идеального фильтра». И весовые функции Кайзера Wk и Хемминга WX, ни в каком смысле не являются оптимальными (даже если сами окна и удовлетворяют тому или иному критерию оптимальности), и разработчик в зависимости от поставленной задачи должен оптимизировать выбранные параметры окон или предлагать другие методы уменьшения боковых лепестков в функции отклика РЛС.
Наиболее близким к заявленному техническому решению, которое и принято в качестве прототипа, является использование весовой обработки сигнала с применением весовых оконных функций [2], в основе которых является согласованная фильтрация.
Однако, уровень подавления в них недостаточен для получения высоких показателей точности вследствие того, что они не являются решением задачи получения оптимума (максимального подавления боковых лепестков). В предполагаемом изобретении построена оптимальная весовая функция по критерию - существенное подавление боковых лепестков от всех мешающих переотражений, превышающее полученное другими оконными функциями при получении максимального отношения сигнал/шум по полезному сигналу.
Модель излучаемого сигнала может быть представлена в комплексном виде [6]:

где S(t) - излучаемый сигнал ЛЧМ импульс, A(t) и ф(t) - законы амплитудной и фазовой модуляции; ω0- несущая частота сигнала.
Предполагается, что сигнал имеет конечную длительность импульса τ. Без потери информации о видах модуляции можно использовать модель комплексной огибающей сигнала S(t)=A(t)ejф(t), что равносильно сдвигу спектра сигнала на нулевую частоту.
Для решения поставленной задачи используются зондирующие сигналы, обладающие высоким разрешением по задержке, и в частности ЛЧМ импульсный сигнал. В теории комплексных сигналов с конечной длительностью и полосой [5] линейный частотно-модулированный (ЛЧМ) сигнал может быть представлен точкой в конечномерном гильбертовом n-мерном (комплексном) пространстве, размерностью, равной базе сигнала В=τi⋅fв, где fв - верхняя частота спектра сигнала. Каждое квантованное значение S; определяется как проекция сигнала S(t) на Si координатную ось. Все координатные оси Si (где i=1, 2, …, n) взаимно ортогональны, длина вектора 
Тогда для формирования алгоритма обработки излучаемый сигнал можно представить n-мерным вектором (n=В) в комплексном пространстве:

где: S0i- комплексные отсчеты в дискретные моменты времени.
Для нахождения оптимального алгоритма обработки приходящий сигнал u(t) представляется как сумма полезного сигнала, переотраженных сигналов и теплового шума приемника [6]

В представленной модели первое слагаемое  является полезным сигналом, отраженным от наблюдаемой отражающей точки, второе
является полезным сигналом, отраженным от наблюдаемой отражающей точки, второе  - помехой (мешающие сигналы - переотражения от всех других отражающих точек элементов конструкции), третье
- помехой (мешающие сигналы - переотражения от всех других отражающих точек элементов конструкции), третье  - шумовой составляющей и т -длительность импульса, i=1, 2…n, где n - количество отсчетов внутри импульса Видно, что в общем случае принимаемый сигнал нельзя представлять сигналом, отраженным от одной точки, и помимо полезного сигнала в одно время на вход приемника поступают помехи и шумы. Известно [4], что согласованный фильтр является оптимальным приемником лишь в случаях, когда аддитивные помехи, типа белого шума, превалируют над мешающими отражениями. Если же уровень последних относительно велик, структуры оптимального сигнала и оптимального приемника будут более сложными и существенно зависят от конкретной обстановки. Необходимая априорная информация конкретной обстановки предполагает знание взаимного расположения полезных и мешающих отражателей (блестящих точек) по месту и времени, уровню сигнала и характеру помех. Отсутствие необходимой статистики отражателей не позволяет использовать для решения данной задачи статистические методы. В этом случае используют нестатические оценки измеряемых параметров [4].
- шумовой составляющей и т -длительность импульса, i=1, 2…n, где n - количество отсчетов внутри импульса Видно, что в общем случае принимаемый сигнал нельзя представлять сигналом, отраженным от одной точки, и помимо полезного сигнала в одно время на вход приемника поступают помехи и шумы. Известно [4], что согласованный фильтр является оптимальным приемником лишь в случаях, когда аддитивные помехи, типа белого шума, превалируют над мешающими отражениями. Если же уровень последних относительно велик, структуры оптимального сигнала и оптимального приемника будут более сложными и существенно зависят от конкретной обстановки. Необходимая априорная информация конкретной обстановки предполагает знание взаимного расположения полезных и мешающих отражателей (блестящих точек) по месту и времени, уровню сигнала и характеру помех. Отсутствие необходимой статистики отражателей не позволяет использовать для решения данной задачи статистические методы. В этом случае используют нестатические оценки измеряемых параметров [4].
Практический опыт и теоретические исследования, представленные в существующей литературе, показывают, что все эти сигналы представляют линейную комбинацию, и работа оптимального приемника может быть представлена операцией интегрирования произведения приходящего сигнала и весовой функции, отличной от согласованной фильтрации (несогласованная фильтрация) [5].
В этом случае задача синтеза весового фильтра может быть сведена к задаче разрешения сигнал  принимаемого в совокупности с (n-1) другими сигналами, время прихода которых неизвестно. Однако можно констатировать, что все переотраженные сигналы придут позже прямого основного сигнала, на который настроен приемный временной строб длительностью, равной длительности импульса зондирующего сигнала. Для получения решения принимаемый пространственно-временной сигнал представляется в виде пространственно-временной матрицы
принимаемого в совокупности с (n-1) другими сигналами, время прихода которых неизвестно. Однако можно констатировать, что все переотраженные сигналы придут позже прямого основного сигнала, на который настроен приемный временной строб длительностью, равной длительности импульса зондирующего сигнала. Для получения решения принимаемый пространственно-временной сигнал представляется в виде пространственно-временной матрицы  строки которой определяют значения (отсчеты) полезного сигнала и всех мешающих сигналов, попадающих во временной строб, упорядоченные по времени прихода с шагом дискретизации, соизмеримым с разрешением по задержке. Выделяем строку полезного сигнала
строки которой определяют значения (отсчеты) полезного сигнала и всех мешающих сигналов, попадающих во временной строб, упорядоченные по времени прихода с шагом дискретизации, соизмеримым с разрешением по задержке. Выделяем строку полезного сигнала  (наиболее часто, это первый приходящий полезный сигнал k=1). Все остальные строки матрицы представляют собой матрицу помех.
(наиболее часто, это первый приходящий полезный сигнал k=1). Все остальные строки матрицы представляют собой матрицу помех.
Для этого случая можно определить оптимальную весовую функцию  (оптимальный фильтр), используя критерий получения максимума отклика фильтра на полезный сигнал при подавлении всех мешающих сигналов.
(оптимальный фильтр), используя критерий получения максимума отклика фильтра на полезный сигнал при подавлении всех мешающих сигналов.
Техническим результатом изобретения является увеличение точности измерения параметров относительного движения космических аппаратов в условиях влияния переотраженных помех. С помощью предлагаемого способа обработки принимаемого пространственно-временного сигнала и устройства для его осуществления можно существенно подавлять сопутствующие переотраженные сигналы.
Технический результат достигается тем, что способ оптимальной первичной пространственно-временной обработки принимаемого пространственно-временного сигнала в РЛС, работающей при наличии множества мешающих сигналов переотражения, заключается в следующем:
- с блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров принимают оцифрованный сигнал;
- формируют матрицу принимаемых пространственно-временных сигналов;
- выделяют k-тую строку полезного пространственно-временного сигнала;
- формируют матрицу помех без k-той строки;
- определяют оптимальный весовой вектор  для которого скалярное произведение мешающих векторов-сигналов и весового вектора равно 0, а скалярное произведение матрицы полезного сигнала и весового вектора максимально
для которого скалярное произведение мешающих векторов-сигналов и весового вектора равно 0, а скалярное произведение матрицы полезного сигнала и весового вектора максимально  и
и 
В этом случае весовой вектор  определяется выражением:
определяется выражением:

где (Sij)-k - матрица (Sij) без k-той строки, матрица мешающих сигналов,  k-тая строка полезного сигнала, Е - единичная матрица n-го порядка; обозначение матрицы с буквой Т означает, что матрица транспонированная, со значком -1, что матрица обратная;
k-тая строка полезного сигнала, Е - единичная матрица n-го порядка; обозначение матрицы с буквой Т означает, что матрица транспонированная, со значком -1, что матрица обратная;
- записывают оптимальный весовой вектор  в постоянное запоминающее устройство (ПЗУ) бортовой аппаратуры;
в постоянное запоминающее устройство (ПЗУ) бортовой аппаратуры;
- определяют отклик фильтра построенного с использованием оптимального весового вектора: 
где αi - неизвестные, но постоянные по длительности импульса амплитудные значения принимаемых пространственно-временных сигналов.
Выбор импульсного ЛЧМ сигнала позволяет достаточно просто варьировать параметры фильтра и подбирать в соответствии с требованиями к системе различные, наиболее оптимальные для каждого конкретного случая, параметры сигнала - длительность импульса (τ), ширину полосы сигнала (Fдев) и частоту квантования (Fкв), а также величину рабочей зоны сильного подавления боковых лепестков.
Устройство для формирования весового вектора содержит блок формирования матрицы принимаемых пространственно-временных сигналов, на вход которого, от блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров поступает принимаемый пространственно-временной сигнал, а выход соединен с входом блока формирования k-той строки полезного пространственно-временного сигнала и матрицы помех, выход которого соединен со входом блока формирования весового вектора, выход которого через постоянное запоминающее устройство соединен с первым входом блока весовой обработки принимаемого пространственно-временного сигнала, во второй вход которого от блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров поступает принимаемый пространственно-временной сигнал, а выход служит для вывода результата обработки 
Сущность изобретения поясняется рисунками и чертежами, представленными на фигурах 1-5.
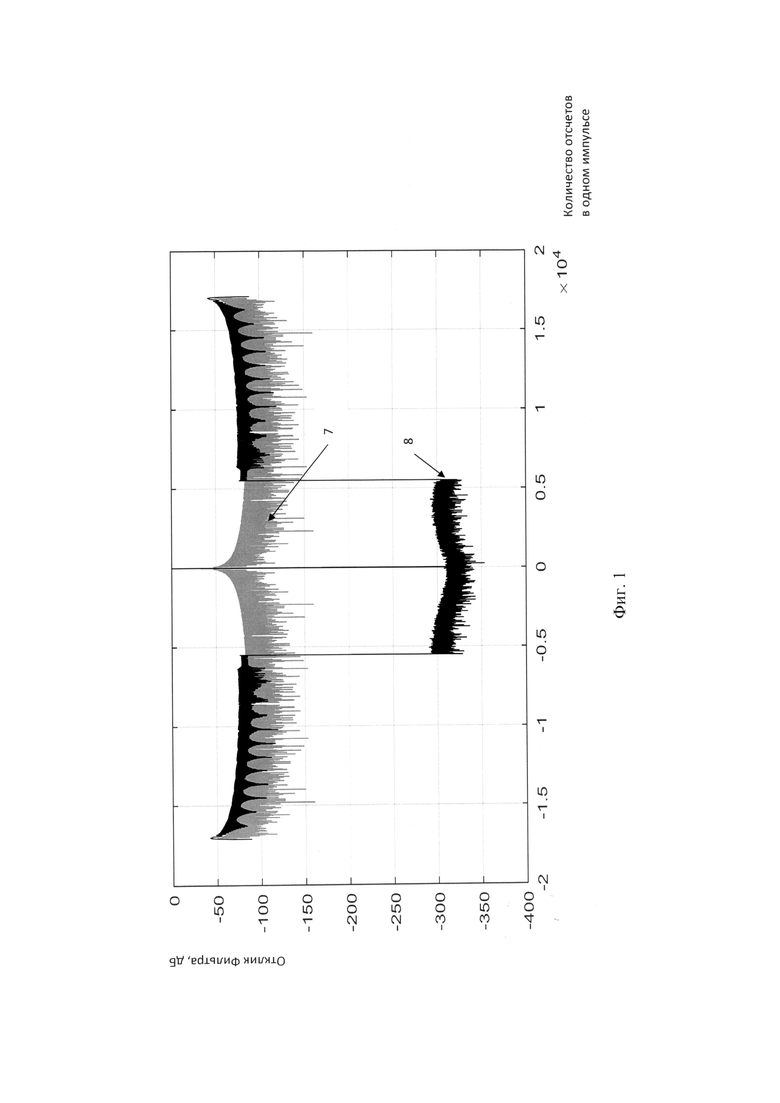
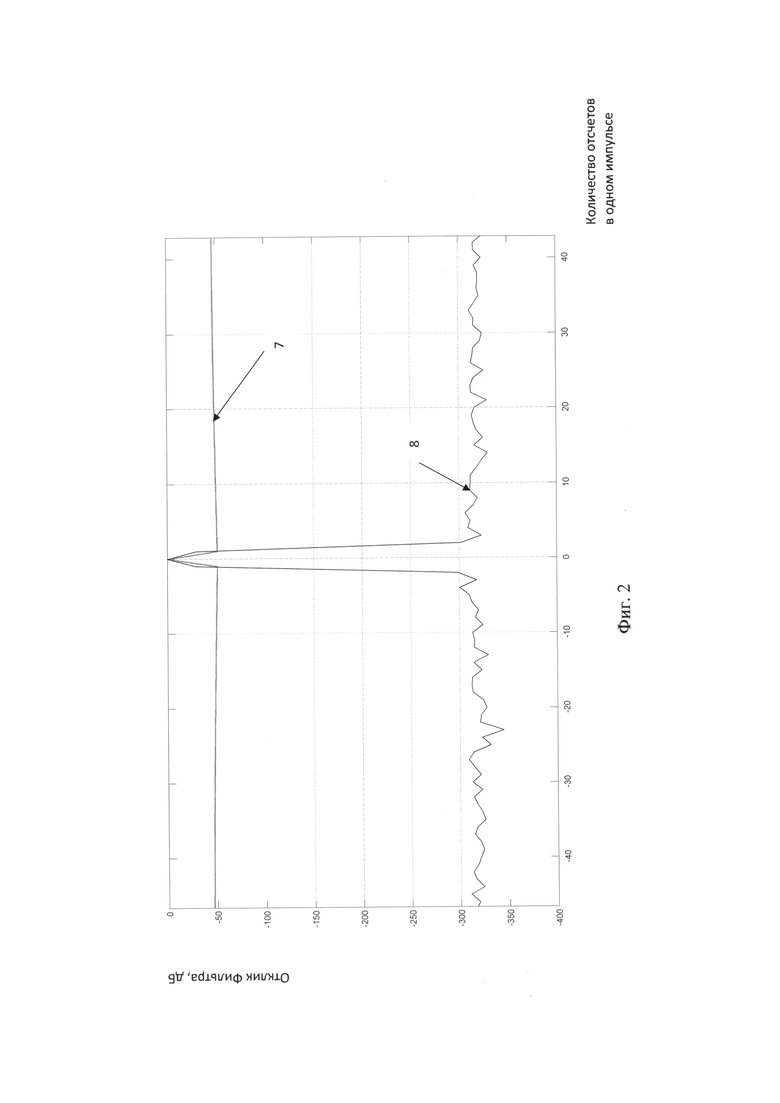
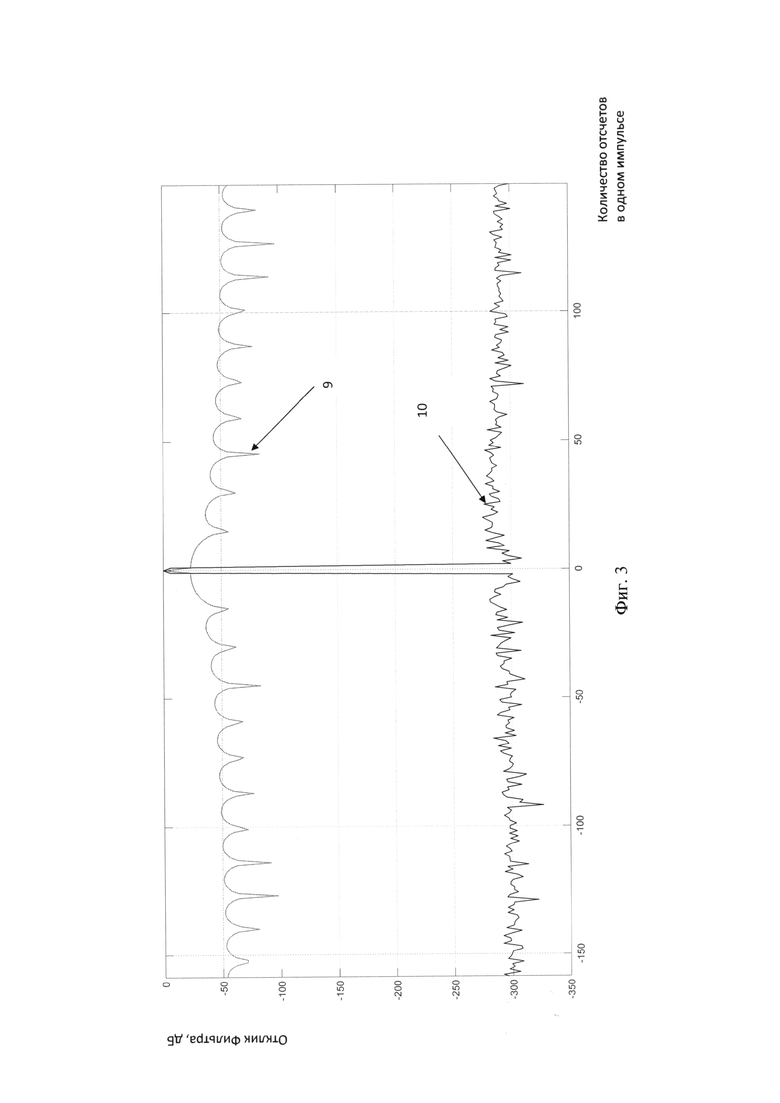
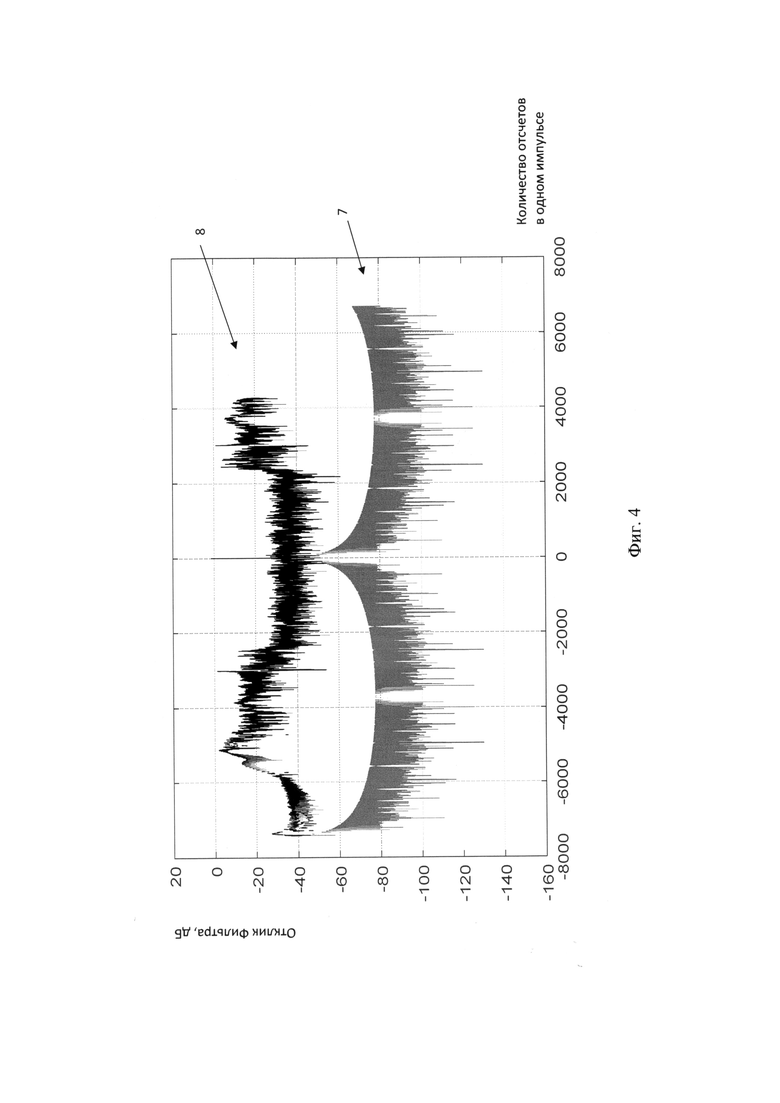
На фиг. 1-4 представлены зависимости отклика фильтра в дБ от количества отсчетов в одном импульсе при различных значениях параметров: частоты девиации, частоты квантования, длительностях импульса, а также размера рабочей зоны подавления боковых лепестков.
На фиг. 1 - при длительности импульса τ=25 мкс, F дев=684 МГц, Fкв. - 685 МГЦ, d=0,9898 потери l-d=0,0103, рабочая зона от -5500 до +5500; (цифрами обозначены 7 - согласованный фильтр, 8 - предлагаемый фильтр);
на фиг. 2 - при τ=50 мкс, F дев=370 МГц, F кв.=371 МГЦ, d=0,9844, 1-d=0,016, рабочая зона от -6000 до +6000; (цифрами обозначены 7 -согласованный фильтр, 8 - предлагаемый фильтр);
на фиг. 3 - при τ=120 мкс F кв.=155 МГц, F дев=145 МГц, d=0,8425 потери l-d=0, 1575, рабочая зона от -4500 до +4500; (цифрами обозначены 9 - боковые лепестки при согласованной фильтрации, 10 - боковые лепестки при предлагаемой фильтрации);
на фиг. 4 - показана ситуация с неправильным выбором параметров работы системы обработки сигнала (τ=20 мкс, Рдев=370 МГц, Fкв.=371 МГц, d=0,0474, потери 1-d=0, 9526, рабочая зона = +3000); (цифрами обозначены 7 - согласованный фильтр, 8 - предлагаемый фильтр);
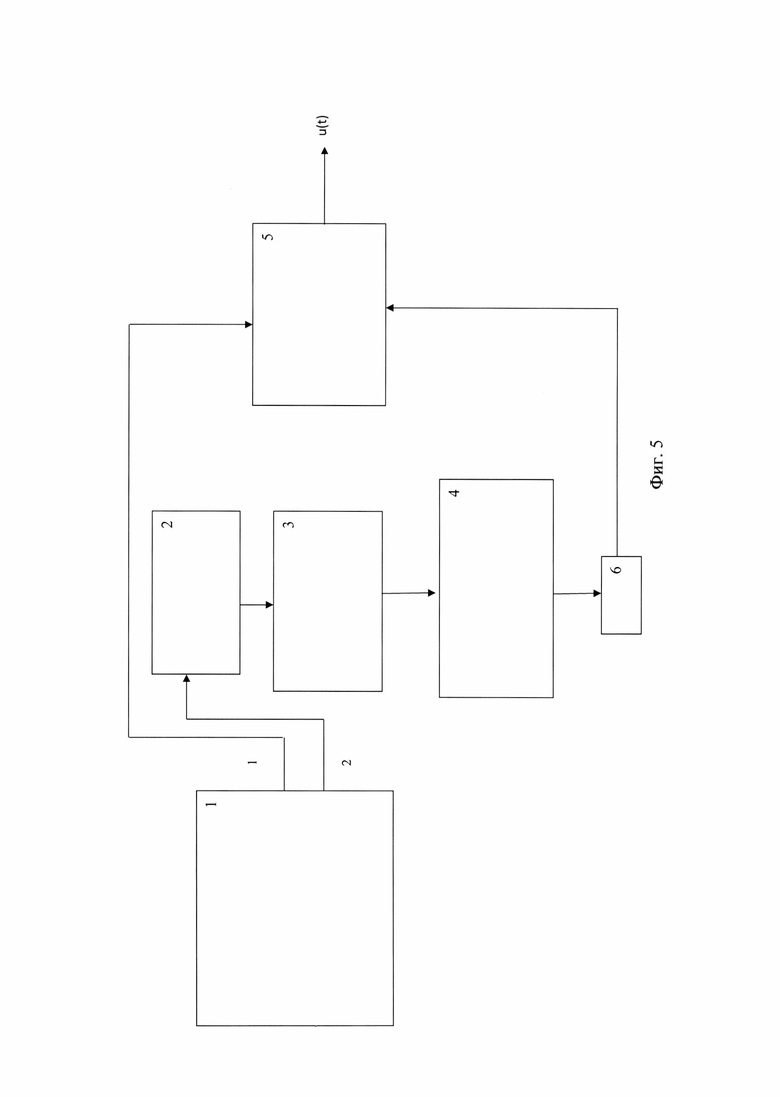
на фиг. 5 - структурная схема устройства для формирования весового вектора, где:
1 - блок формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров;
2 - блок формирования матрицы принимаемых пространственно-временных сигналов;
3 - блок формирования k-той строки полезного пространственно-временного сигнала и матрицы помех;
4 - блок формирования весового вектора;
5 - блок весовой обработки принимаемого пространственно-временного сигнала;
6 - постоянное запоминающее устройство (ПЗУ).
Устройство работает следующим образом.
Принимаемый оцифрованный пространственно-временной сигнал с блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров (1) поступает в блок формирования матрицы принимаемых пространственно-временных сигналов (2), выход которого соединен со входом блока формирования k-той строки полезного пространственно-временного сигнала и матрицы помех (3). Причем блок формирования матрицы принимаемых пространственно-временных сигналов (2) представляет собой формирователь матрицы, а блок формирования k-той строки полезного пространственно-временного сигнала и матрицы помех (3) осуществляет выделение k-той строки полезного пространственно-временного сигнала и формирует матрицу помех без k-той строки.
Сформированная матрица принимаемых пространственно-временных сигналов поступает в блок формирования k-той строки полезного пространственно-временного сигнала и матрицы помех (3), с выхода которого цифровой сигнал, в виде последовательности комплексных чисел, поступает на вход блока формирования весового вектора (4), в котором ищется оптимальный весовой вектор  который определяется выражением
который определяется выражением  в конечномерном гильбертовом (комплексном) n-мерном пространстве, для которого скалярное произведение всех мешающих векторов-сигналов и весового вектора равно 0, а скалярное произведение полезного сигнала и весового вектора максимально (минимум потерь)
в конечномерном гильбертовом (комплексном) n-мерном пространстве, для которого скалярное произведение всех мешающих векторов-сигналов и весового вектора равно 0, а скалярное произведение полезного сигнала и весового вектора максимально (минимум потерь)
С выхода блока формирования весового вектора (4) оптимальный весовой вектор  записывается в постоянное запоминающее устройство (ПЗУ) (6) бортовой аппаратуры.
записывается в постоянное запоминающее устройство (ПЗУ) (6) бортовой аппаратуры.
Оптимальный весовой вектор  с ПЗУ (6) поступает и на блок весовой обработки принимаемого пространственно-временного сигнала (5), в котором с помощью скалярного произведения оптимального весового вектора и принимаемого пространственно-временного сигнала с выхода 1 блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров (1)
с ПЗУ (6) поступает и на блок весовой обработки принимаемого пространственно-временного сигнала (5), в котором с помощью скалярного произведения оптимального весового вектора и принимаемого пространственно-временного сигнала с выхода 1 блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров (1)  получаем результат обработки
получаем результат обработки 
Выбор излучаемого сигнала позволяет достаточно просто варьировать параметры фильтра и подбирать в соответствии с требованиями к системе различные, наиболее оптимальные для каждого конкретного случая, параметры сигнала - длительность импульса (т), ширину полосы сигнала (Fдев) и частоту квантования (Fкв), а также величину рабочей зоны сильного подавления мешающих сигналов.
Пример 1.
Для проверки полученных результатов с помощью программы MATLAB было проведено моделирование отклика фильтра для различных значений перечисленных параметров ЛЧМ сигнала. При этом программа моделирования строилась таким образом, что на каждом шаге варьировался только один параметр, а остальные сохранялись постоянными.
Контролировались значения потерь (т.е. с учетом нормирования разница между максимальным значением с/ш согласованной фильтрации и предлагаемой весовой фильтрации) и вид функции отклика. По каждому эксперименту были построены соответствующие аналитические графики, определялись потери по сравнению с согласованным фильтром.
Для τ=25 мкс. Минимальные потери (0,01÷0,05) для τ=25 мкс получены в диапазоне Fкв. от 590 до 680 МГЦ. Подавление боковых лепестков в рабочей зоне (от -5000 до +5000 отсчетов) не более минус 300 дБ. С увеличением частоты квантования до 780 МГц потери возрастают незначительно (порядка 0,15 и 0,17). Для частот квантования ниже 590 МГц резко возрастают потери (т.е. приближаются к ~ 1) и происходит «срыв слежения». С увеличением рабочей зоны потери увеличиваются.
Для τ=23 мкс. Область минимальных потерь (порядка 0,01÷0,07) получена в диапазоне Fкв. от 640 до 680 МГц. Для Fкв. <620 МГц наблюдается «срыв слежения».
Для τ=20 мкс. Потери при τ=20 мкс значительно увеличиваются (от 0,15 и выше). Диапазон изменения Fkb, в котором не наблюдается «срыв слежения», очень незначителен (750 - 800 МГц).
Были проведены измерения для больших значений длительности импульса τ=50, 100 и 120 мкс. Например, для τ=120 мкс. F кв=155 МГц, F дев=145 МГц, d=0,8425 потери 1-d=0, 1575, рабочая зона от -5000 до +5000.
Результаты моделирования:
1) Подавление боковых лепестков в рабочей зоне (от -5000 до +5000 количества отсчетов) не более минус 300 дБ. При увеличении рабочей зоны возможен «срыв слежения». Например, при F кв=685 МГц и рабочей зоне (от -5500 до +5500) d=0,9474, потери (1-d)=0,0526, т.е. потери почти такие же, как и при рабочей зоне (от -5000 до+5000). При рабочей зоне от -6500 до +6500 потери (1-d)=0,8838, т.е. потери резко возрастают и происходит «срыв слежения».
2) При F дев ≈ F кВ потери (т.е. с учетом нормирования разница между максимальным значением с/ш согласованной фильтрации и предлагаемой весовой фильтрации) минимальны.
Проведенное моделирование при вычислении весового вектора по способу (1) показало подавление переотраженных сигналов в рабочей зоне ~ 300 дБ.
Вычисление весового вектора производится разово и заносится в ПЗУ измерительной системы для использования в условиях измерения.
Благодаря появлению высокоэффективной вычислительной техники, все решения первичной обработки принимаемого сигнала в РЛС, работающей при наличии множества мешающих сигналов переотражения проведены во временной области, что существенно увеличивает эффективность вычислений.
Устройство для осуществления способа оптимальной первичной пространственно-временной обработки принимаемого сигнала в радиолокационной станции, работающей при наличии множества мешающих сигналов переотражения может быть реализовано в виде аппаратно-программного комплекса и персональной электронной вычислительной машины на базе процессора, выполненной с возможностью осуществления функций блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров, блока формирования матрицы принимаемых пространственно-временных сигналов, блока формирования k-той строки полезного пространственно-временного сигнала и матрицы помех, блока формирования весового вектора, блока весовой обработки принимаемого пространственно-временного сигнала.
Литература
1. «Аппаратура спутниковой навигации МКС, решаемые задачи, основные характеристики, перспективы комплексного решения задач навигации на МКС и кораблях «Союз» и «Прогресс»» / Е.А. Микрин и др. // Шестой международный аэрокосмический конгресс IAC'09).
2. Некоторые оконные функции и их параметры http://dspsystem.narod.ru/add/win/win.html.
3. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. М. «Мир», 1978.
4. Фалькович С.Е., Пономарев В.И., Шкварко Ю.В. Оптимальный прием пространственно-временных сигналов в радиоканалах с рассеянием. М.: Радио и связь, 1989 г.
5. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М: Радио и связь, 1981 г.
6. Вакман Д.Е., Седлецкий P.M. Вопросы синтеза радиолокационных сигналов. М: Советское радио, 1973 г.
Изобретение относится к области радиолокации, в частности к радиолокационным средствам измерения параметров относительного движения космических аппаратов (КА), и используется при проектировании радиолокационной станции (РЛС) для сближения, стыковки с крупногабаритными космическими объектами, например с международной космической станцией (МКС) и другими протяженными космическими объектами. Техническим результатом изобретения является увеличение точности измерения параметров относительного движения космических аппаратов в условиях влияния переотраженных помех. В заявленном способе осуществляют прием оцифрованного пространственно-временного сигнала в радиолокационной станции, формирование матрицы принимаемых пространственно-временных сигналов, определение оптимального весового вектора, для которого скалярное произведение мешающих векторов-сигналов и весового вектора равно 0, а скалярное произведение матрицы полезного сигнала и весового вектора максимально. Оптимальный весовой вектор записывают в постоянное запоминающее устройство (ПЗУ) бортовой аппаратуры и определяют с его использованием результат обработки, не содержащий сигналов переотражения. Заявлено также устройство для осуществления способа. 2 н.п. ф-лы, 5 ил., 1 пр.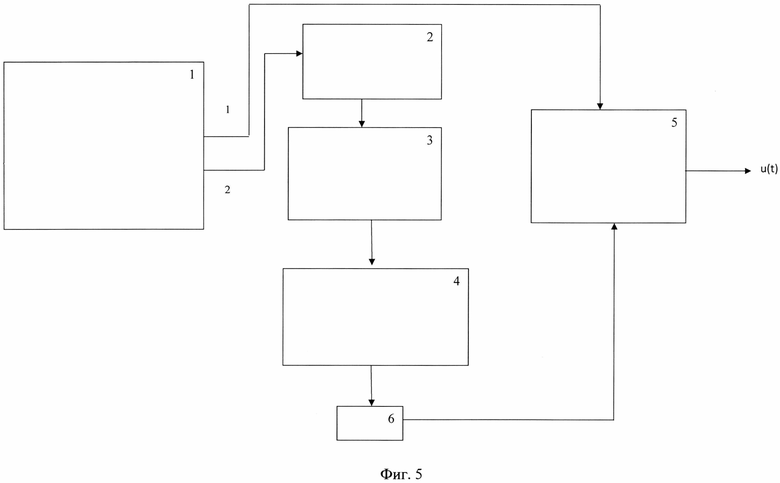
1. Способ оптимальной первичной пространственно-временной обработки принимаемого пространственно-временного сигнала в радиолокационной станции, работающей при наличии множества мешающих сигналов переотражения, заключающийся в приеме оцифрованного принимаемого пространственно-временного сигнала, содержащего сумму полезного сигнала, представляющего собой отраженный от многоточечной цели линейно-частотно-модулированный (ЛЧМ) импульсный сигнал, мешающих переотраженных сигналов и теплового шума приемника, формировании матрицы принимаемых пространственно-временных сигналов в виде пространственно-временной матрицы, строки которой определяют значения полезного сигнала и всех мешающих сигналов, попадающих во временной строб, упорядоченные по времени прихода с шагом дискретизации, соизмеримым с разрешением по задержке, выделении k-й строки полезного пространственно-временного сигнала, формировании матрицы помех без k-й строки, определении оптимального весового вектора, для которого скалярное произведение мешающих векторов-сигналов и весового вектора равно 0, а скалярное произведение матрицы полезного сигнала и весового вектора максимально, записи оптимального весового вектора в постоянное запоминающее устройство (ПЗУ) бортовой аппаратуры, определении результата обработки принимаемого пространственно-временного сигнала с подавленными сигналами переотражения в рабочей зоне путем скалярного произведения оптимального весового вектора и принимаемого пространственно-временного сигнала.
2. Устройство для оптимальной первичной пространственно-временной обработки принимаемого пространственно-временного сигнала в радиолокационной станции, работающей при наличии множества мешающих сигналов переотражения, реализующее способ по п. 1, содержащее блок формирования матрицы принимаемых пространственно-временных сигналов в виде пространственно-временной матрицы, строки которой определяют значения полезного сигнала и всех мешающих сигналов, попадающих во временной строб, упорядоченные по времени прихода с шагом дискретизации, соизмеримым с разрешением по задержке, на вход которого от блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров поступает принимаемый пространственно-временной сигнал, содержащий сумму полезного сигнала, представляющего собой отраженный от многоточечной цели ЛЧМ импульсный сигнал, мешающих переотраженных сигналов и теплового шума приемника, а выход соединен с входом блока формирования k-й строки полезного пространственно-временного сигнала и матрицы помех, выход которого соединен со входом блока формирования весового вектора, выход которого через постоянное запоминающее устройство соединен с первым входом блока весовой обработки принимаемого пространственно-временного сигнала, во второй вход которого от блока формирования цифровой модели принимаемого пространственно-временного сигнала и его параметров поступает принимаемый пространственно-временной сигнал, а выход служит для вывода результата обработки принимаемого пространственно-временного сигнала с подавленными сигналами переотражения в рабочей зоне.

