Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения длинносоставных поездов.
Уровень техники
Известен способ регулирования движения поездов, основанный на контроле состояний путевых перегонных участков с участием локомотивных и станционной радиостанций, с локомотивов, находящихся в зоне связи, на посты ЭЦ передают информацию о координатах головы поезда, на локомотивы с постов ЭЦ передают информацию о состоянии впереди лежащих путевых участков, установленных маршрутах на впереди лежащих станциях, локомотивные ЭВМ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость движения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством, обмен информацией между локомотивами, хвостовыми тележками и постами ЭЦ станции отправления и станции приема осуществляют тогда, когда поезд находится на станции, а также на участках приближения или удаления, затем связь со станциями осуществляют через ретрансляторы, размещенные на переездах, локомотивах поездов, идущих по перегону, или стационарных ретрансляторах; инициализация подключения и отключения локомотивных радиостанций и радиостанций на прицепных тележках от станционных радиостанций осуществляется по сигналам с приемника ГЛОНАСС на границах зон устойчивой радиосвязи, а также при движении в зоне неустойчивой радиосвязи через мобильные локомотивные ретрансляторы поездов, идущих вслед или перед поездом; с радиостанций прицепных тележек на станционные радиостанции передается информация о местонахождении тележки и состоянии путевых участков за хвостом поезда; прерывание передачи информации не вызывает опасных последствий для движения поездов, может происходить только задержка поезда; обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных путевых участках, об изменении направления движения на перегоне, а также передаче информации на переезды о приближении поезда, передача информации с переездов на станции осуществляется по оптоволоконному кабелю между станциями и переездами [Патент.2739086 (РФ). Способ регулирования движения поездов и устройство контроля состояний путевых участков для его осуществления / Полевой Ю.И. - Опубл. 21.12.2020 Бюл. №36, МПК B61L 23/16].
Недостатком способа является то, что при пропуске длинносоставных поездов возникают большие продольные напряжения, что негативно влияют на безопасность движения поездов.
Известен способ регулирования движения поездов с использованием устройств радиосвязи, с помощью которых передают с поста электрической централизации ЭЦ на локомотив Л информацию о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля ЗК, т.е. между станцией и серединой перегона, номерах установленных маршрутов УМ и прогнозное время приема/отправления поезда, локомотивной ЭВМ ЭВМЛ, которая на основании полученной информации и информации, хранящейся в память о путевом развитии, плане и профиле пути всего участка следования Л, а также с учетом местонахождения Л, которое определяют с помощью приемника ГЛОНАСС ПГЛ, рассчитывают протяженность свободного участка пути перед поездом, определяет конфигурацию маршрута, оптимальную скорость движения поезда в любой точке пути и передают информацию о скорости на устройство регулирования скорости движения поезда, которое управляет локомотивным контроллером и краном машиниста, поддерживает оптимальную скорость движения поезда в зоне контроля ЗК, контроль состояний перегонных рельсовых линий РЛ осуществляют тональными рельсовыми цепями ТРЦ с помощью двухпроводной линии для питания ЛП и пошаговой работы линейных распределителей ЛРС, и двухпроводной линии контроля ЛК для передачи информации о состоянии РЦ на посты ЭЦ прилегающих к перегону станций; линии ЛП и ЛК укладывают от середины перегона до станции, к ЛП на посту ЭЦ подсоединяют тональный путевой генератор ПГ, а к ЛК - тональный путевой приемник ПП; под воздействием станционной ЭВМ ЭВМС ПГ посылает в ЛП серии импульсов, между которыми следуют интервалы, выполняющие функции сигнала цикловой синхронизации ЦС, импульсы разделены границами, где фаза сигнала изменяется на противоположную; на границах РЦ устанавливают путевые коробки ПК с аппаратурой питающего конца ПКг (генераторный) или приемного конца ПКп, ПКп и ПКг размещают в шахматном порядке; выходы линейных распределителей ЛРС, размещенные в ПК, подсоединяют к электронным ключам ЭК так, чтобы осуществлять циклический контроль состояний РЦ; по ЛК циклически передают информацию на ПП о состоянии РЦ, при этом к ПП посредством путевых трансформаторов ПТ и ЛК подсоединяют приемные концы РЦ, амплитуда сигнала указывает на состояние РЛ; на Л с постов ЭЦ передают информацию о состоянии РЦ находящихся в зоне ЗК и дополнительно о РЦ на участке, длина которого соответствует интервалу попутного следования и который примыкает к середине перегона, что является зоной управления ЗУ, это позволяет уверенно регулировать скорость движения поезда, пересекающего середину перегона; передачу информации с поста ЭЦ на Л осуществляют с помощью приказа телеуправления ТУ с участием радиопередатчика поста ЭЦ РПЭ, прием информация на Л с поста ЭЦ - с помощью локомотивного радиоприемника РПЛ, на все Л, находящиеся в ЗУ, передают одинаковую информацию: о свободных РЦ на перегоне и установленных маршрутах на станции -маршруты приема и отправления, выбор полезной части информации на Л осуществляют с помощью ПГЛ; переключение РПЛ с приема радиосигнала с поста ЭЦ станции отправления на прием сигнала с поста ЭЦ станции приема осуществляют в середине перегона, которую фиксирует ПГЛ [Патент. 2732181 (РФ). Способ регулирования движения поездов / Полевой Ю.И. - Опубл. 14.09.2020 Бюл. №26, МПК 23/16].
Недостатком способа является то, что при пропуске длинносоставных поездов возникают большие продольные напряжения, что негативно влияют на безопасность движения поездов.
Данные техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является осуществление регулирования движения длинносоставных поездов с использованием датчик контроля продольной нагрузки ДКПН или датчика расстояния между поездами ДРМП. Замена обычных поездов длиносоставными существенно повышает пропускную способность, а также сокращает количество микроэлектронных устройств и устройств радиосвязи, т.к. эти устройства используются только на локомотиве головного поезда.
Способ регулирования движения длинносоставных поездов с использованием устройств радиосвязи, с помощью которых передают с поста электрической централизации ЭЦ на локомотив Л информацию о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля ЗК, номерах установленных маршрутов УМ и прогнозное время приема/отправления поезда, локомотивной ЭВМ ЭВМЛ, которая рассчитывает протяженность свободного участка пути перед поездом, определяет оптимальную скорость движения поезда и передают информацию о скорости на устройство регулирования скорости движения поезда, которое управляет локомотивным контроллером и краном машиниста, поддерживает оптимальную скорость движения поезда в зоне контроля ЗК, контроль состояний перегонных рельсовых линий РЛ осуществляют тональными рельсовыми цепями ТРЦ, отличающийся тем, что для регулирования движения второго, третьего и следующих сцепленных поездов предусмотрены датчики механического продольного напряжения ДМПН, которые устанавливаются между хвостовым вагоном каждого впереди идущего поезда и локомотивом следующего (фиг. 1) или датчики расстояния между поездами ДРМП, которые также устанавливаются между хвостовым вагоном каждого впереди идущего поезда и локомотивом следующего, упомянутые датчики электрически соединенные с ЭВМЛ;
благодаря датчикам создаются условия поддержания минимального продольного напряжения между поездами, что существенно повышает безопасность движения поездов;
датчиком механического продольного напряжения ДМПН является устройство, которое крепится с помощью автосцепки хвостового вагона впереди идущего поезда и автосцепки локомотива следующего поезда, при возникновении продольных напряжений, пружина устройства растягивается или сжимается, результаты измерения этой деформации передают на локомотив, ЭВМЛ (фиг. 3 и 4) которого с помощью устройства регулирования скорости движения УРСД воздействует на локомотивный контроллер и кран машиниста, создавая дополнительную силу тяги или осуществляя торможение;
вторым вариантом поддержания минимального продольного напряжения между поездами является использование датчика расстояния между поездами ДРМП, который также позволяет осуществить поддержание минимального продольного напряжения между поездами.
Краткое описание чертежей
На фиг. 1 - структурная схема соединения поездов в длинносоставном поезде с участием датчики продольного напряжения; на фиг. 2 - структурная схема соединения первого и второго поезда с участием датчика механической продольной нагрузки ДМПН; на фиг. 3 - структурная схема датчика продольного напряжения соединенного с ЭВМЛ; на фиг. 4 - структурная схема соединения локомотивных устройств и радиосвязи поезда с ж.д. станциями ограничивающими перегон; на фиг. 5 - структурная схема соединения первого и второго поезда с участием датчика расстояния между поездами ДРМП.
Описание изобретения
На фиг. 1, 2, 3, 4 и 5 представлены следующие условные обозначения:
1 - длинносоставный поезд ДСП;
2, 3, 4 и 5 - первый, второй, третий и четвертый поезда П1, П2, П3 и П4;
6,7,8 и 9 - первый, второй, третий и четвертый локомотивы Л1, Л2, Л3 и Л4;
10, 11, 12 и 13- первый, второй, третий и четвертый составы СВ1, СВ2, СВ3 и СВ4;
14, 15, 16 и 17- первый, второй, третий и четвертый хвостовые вагоны ХВ1, ХВ2, ХВ3 и ХВ4;
18,19 и 20 - первый, второй и третий датчики продольного напряжения ДПН1, ДПН2 и ДПН3;
21 - передняя автосцепка второго локомотива;
22 - задняя автосцепка хвостового вагона первого поезда;
23 и 24 - задняя и передняя автосцепки датчик механической продольной нагрузки ДМПН;
25 - корпус ДМПН (цилиндр);
26 - ось ДМПН;
27 - брус крепления троса на ДМПН;
28 - трос;
29 - катушка для намотки троса;
30 - рельс;
31 - левая крышка ДМПН;
32 - левая пружина ДМПН;
33 - поршень, жестко соединенный с осью ДМПН;
34 - правая пружина ДМПН;
35 - правая крышка ДМПН;
36 - первая соединительная клемма;
37 - соединительный провод;
38 - вторая соединительная клемма;
39 - ось катушки;
40 - ползунковый контакт;
41, 42, 43, 44 и 45 - соединительные контакты;
46 - локомотивная ЭВМ ЭВМЛ;
47 - радиостанция станции отправления РССО;
48 - локомотивная радиостанция РСЛ;
49 - радиостанция станции приема РССП;
50 - ЭВМ станции отправления ЭВМО;
51 - приемник ГЛОНАСС;
52 - радиостанция станции приема РССП;
53 - вагоны поезда ВП;
54 - устройство регулирования скорости движения УРСД;
55 - радиоканал связи между станциями;
56 - радиоканал связи между станцией отправления и локомотивом;
57 - радиоканал связи между станцией приема и локомотивом.
58, 59, 60, 61 и 62 - соединительные провода;
63 - брус крепления троса, на автосцепке хвостового вагона впереди идущего поезда.
Способ регулирования движения длинносоставных поездов с использованием устройств радиосвязи, с помощью которых передают с постов электрической централизации ЭЦ на локомотив Л информацию о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля ЗК, номерах установленных маршрутов УМ и прогнозное время приема/отправления поезда, локомотивной ЭВМ ЭВМЛ 46, рассчитывают протяженность свободного участка пути перед поездом, определяет оптимальную скорость движения поезда и передает информацию о скорости на устройство регулирования скорости движения поезда, которое управляет локомотивным контроллером и краном машиниста, поддерживает оптимальную скорость движения поезда в зоне контроля ЗК, контроль состояний перегонных рельсовых линий РЛ осуществляют тональными рельсовыми цепями ТРЦ.
На фиг. 1 представлен длинносоставный поезд ДСП 1, состоящий из четырех поездов ΠΙ, П2, ПЗ и П4, с локомотивами Л1 6, Л2 7, Л3 и Л4 9, с составами СВ1 10, СВ2 11, СВ3 12 и СВ4 13, с хвостовыми вагонами ХВ1 14, ХВ2 15, ХВ3 16 и ХВ4 17, с датчиками продольного напряжения ДПН1 18, ДПН2 19 и ДПН3 20.
Для регулирования движения второго, третьего и следующих сцепленных поездов предусмотрены датчики механической продольной нагрузки ДМПН, которые устанавливаются между хвостовым вагоном ХВ каждого впереди идущего поезда и локомотивом Л следующего или датчики расстояния между поездами ДРМП. Упомянутые датчики электрически соединенные с ЭВМЛ 46.
Благодаря датчикам создаются условия поддержания минимального продольного напряжения между поездами, что существенно повышает безопасность движения поездов.
ДМПН является устройство, которое крепится с помощью автосцепки 22 ХВ 14 (на фиг. 2 поезд 2 П1) впереди идущего поезда и автосцепки Л следующего поезда 21. При создании продольных напряжений, пружина устройства растягивается или сжимается, размеры этой деформации передаются на локомотив 7, ЭВМЛ 46 (фиг. 3 и 4) которого с помощью устройства регулирования скорости движения УРСД 54 воздействует на локомотивный контроллер и кран машиниста, создавая дополнительную силу тяги или осуществляя торможение.
Структурная схема ДМПН и его воздействия на ЭВМЛ 46 Л 7 приведена на фиг. 2 и 3. Корпус ДМПН 25 с помощью оси 26 соединен с задней и передней автосцепками 23 24 датчик ДМПН. Брус 27 жестко соединенный с передней автосцепкой датчика 24 посредством троса 28 осуществляет поворот катушки 29. Если расстояние между Л 7 и ХВ увеличивается, то катушка 29 поворачивается по часовой стрелке вокруг оси, если это расстояние уменьшается то, катушка 29 под воздействием пружины (пружина на фиг. 2 и 3 не показана) поворачивается против часовой стрелки вокруг оси (в направлении стрелки - дуги).
Вращение катушки приводит к тому, что ползунковый контакт 40 скользит по соединительным контактам 41, 42, 43, 44, 45 и 46, замыкая цепь от клеммы 1 ЭВМЛ 46 до контактов 2, 3, 4, 5 и 6 с участием провода 37 и соединительных контактов 41, 42, 43, 44 и 45. Вращение катушки за счет троса 29 при увеличении расстояния между Л 7 ВХ 14 происходит при сжатии пружины 34 и перемещении поршня 33 в направлении движения, который жестко насажен на ось 26. Вращение катушки за счет троса 29 при уменьшении расстояния между Л 7 ВХ 14 происходит при сжатии пружины 32 и перемещении поршня 33 в направлении противоположном направлению движения. Таким образом, передается информация на ЭВМЛ о механической продольной нагрузке на ЭВМЛ. Крышки 31 и 35, жестко соединенные с корпусом 25, удерживают пружины 32 и 34 внутри корпуса 25.
На фиг. 4 представлена структурная схема соединения локомотивных устройств и радиосвязи поезда с ж. д. станциями ограничивающими перегон.
ЭВМЛ 46 с помощью радиостанций РСЛ 48, РССО 47 и РССП 49, соединительных проводов 58, 59 и 60 обменивается информацией со ЭВМ станции отправления ЭВМО 50 и станции приема ЭВМП 52. Местонахождение Л 7 определяется с помощью приемника ГЛОНАСС ПГЛ 51 и передается на ЭВМЛ по соединительному проводу 61, регулирование скорости движения поезда П2 3 осуществляет устройство регулирования скорости движения УРСД 54 с помощью соединительного провода 62.
Вторым вариантом поддержания минимального продольного напряжения между поездами является использование датчика расстояния между поездами ДРМП (фиг.5), который также позволяет осуществить поддержание минимального продольного напряжения между поездами.
На фиг. 5 приведена структурная схема соединения первого и второго поезда с участием датчика расстояния между поездами ДРМП. Воздействие на ЭВМЛ ДРМП аналогично ДМПН (фиг. 3), за исключением того, что трос 28 прикреплен непосредственно к брусу 63, который жестко соединен с автосцепкой 22 ХВ 14 впереди идущего поезда П1 2. Расстояние между поездами должно быть в пределах 20-50 м, оптимальным является расстояние 35 м.
Регулирование скорости движения поезда осуществляется с участием программы и данных, заложенных в ЭВМЛ, машинист осуществляет контроль сближения поезда с препятствием и, при необходимости, берет управление на себя.


В способе для регулирования движения второго, третьего и следующих сцепленных поездов предусмотрено использование датчиков продольного напряжения, которые устанавливаются между хвостовым вагоном каждого впереди идущего поезда и локомотивом следующего, упомянутые датчики электрически соединяются с ЭВМ локомотива, которая с помощью устройства регулирования скорости движения УРСД воздействует на локомотивный контроллер и кран машиниста, создавая дополнительную силу тяги или осуществляя торможение. Реализуется возможность регулирования движения длинносоставных поездов. 5 ил.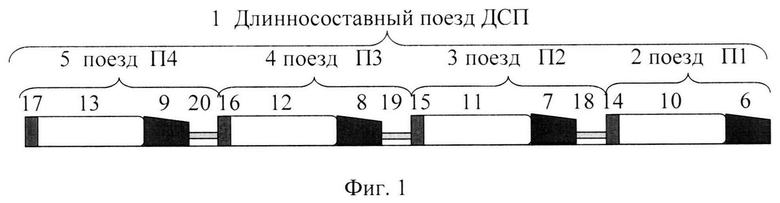
Способ регулирования движения длинносоставных поездов с использованием устройств радиосвязи, с помощью которых передают с поста электрической централизации ЭЦ на локомотив Л информацию о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля ЗК, номерах установленных маршрутов УМ и прогнозное время приема/отправления поезда, локомотивной ЭВМ ЭВМЛ, которая рассчитывает протяженность свободного участка пути перед поездом, определяют оптимальную скорость движения поезда и передают информацию о скорости на устройство регулирования скорости движения поезда, которое управляет локомотивным контроллером и краном машиниста, поддерживает оптимальную скорость движения поезда в зоне контроля ЗК, контроль состояний перегонных рельсовых линий РЛ осуществляют тональными рельсовыми цепями ТРЦ, отличающийся тем, что для регулирования движения второго, третьего и следующих сцепленных поездов используют датчики механического продольного напряжения ДМПН, которые устанавливают между хвостовым вагоном каждого впереди идущего поезда и локомотивом следующего, или датчики расстояния между поездами ДРМП, которые также устанавливают между хвостовым вагоном каждого впереди идущего поезда и локомотивом следующего, упомянутые датчики электрически соединяют с ЭВМЛ; причем датчик механического продольного напряжения ДМПН крепят с помощью автосцепки хвостового вагона впереди идущего поезда и автосцепки локомотива следующего поезда, измеряют деформацию пружины датчика ДМПН в виде растяжения или сжатия при возникновении продольных напряжений, передают результаты измерения этой деформации на ЭВМЛ локомотива, воздействуют ЭВМЛ с помощью устройства регулирования скорости движения УРСД на локомотивный контроллер и кран машиниста, таким образом создают дополнительную силу тяги или осуществляют торможение.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2732181C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| Маневровый тепловоз и способ его эксплуатации без машиниста | 2016 |
|
RU2630859C1 |
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| US 20170274915 A1, 28.09.2017. | |||

