Изобретение относится к средствам испытания авиационной техники, а именно к стендам для испытаний малогабаритных летательных аппаратов, беспилотных летательных аппаратов различной конфигурации и может быть использован в системе предполетной проверки, подготовки БПЛА под нагрузкой и настройки систем управления, подтверждения экспериментальным путем расчетных характеристик БПЛА. На сегодняшний день БПЛА имеют достаточно широкую сферу применения и все больше смещается из силовых и спасательных организаций в сферу гражданского применения: как частными лицами, так и промышленными организациями. Технологии БПЛА быстро развиваются, степень автономности становится выше, что требует подготовки квалифицированных кадров для создания систем управления, проектирования и разработки конструкции БПЛА. При этом возможность испытания БПЛА при его конструировании и первичных испытаниях требует большого пространства или создания стенда для проведения безопасных испытаний и настройки, в плоскостях тангажа, крена и рысканья, под нагрузкой, но без фактического взлета. Особенно актуальна задача разработки данного стенда для отладки и настройки БПЛА, имеющих более четырех движителей и БПЛА сложной конфигурации, так как резко возрастает субъективность оценки правильности работы систем управления БПЛА по точному распределению тяги в заданных плоскостях. На данном этапе испытаний могут быть выявлены неисправности винтомоторной группы (ВМГ), неверное распределение тяги системой управления БПЛА по углам крена и тангажа, паразитное движение в плоскости рысканья и другие сбои.
Известен «Стенд для натурных испытаний летательного аппарата» [1], изобретение относится к области авиации, а более конкретно к конструкциям стендов для проведения натурных испытаний летательных аппаратов тяжелее воздуха, например, самолетов вертикального взлета и посадки и вертолетов, а также для обучения пилотов и экипажей таких летательных аппаратов. Стенд содержит основание и устройство для вывешивания испытуемого летательного аппарата (ЛА) над основанием. Последнее выполнено в виде опоры, одним концом прикрепленной к основанию, а другим концом с помощью двухстепенного шарнира соединенной со средней частью рычага. ЛА установлен в раме, охватывающей его по периметру в горизонтальной плоскости с возможностью качания в вертикальной плоскости вокруг горизонтальной оси, перпендикулярной плоскости симметрии ЛА. Рама закреплена с помощью второй пары цапф на концах скобы с возможностью качания вокруг продольной оси ЛА.
Недостатком данного стенда является вывешивание ЛА, за счет тросовой системы, использование которой не позволяет испытывать БПЛА мультироторного типа.
Известен «Стенд для испытаний квадрокоптеров» [2]. Устройство состоит из основания, на котором неподвижно закреплена стойка, внутри которой установлен с возможностью вращения вертикальный вал с закрепленной на нем платформой. На платформе установлен привод, кинематически связанный с горизонтальным валом. На конце горизонтального вала установлен неподвижно другой привод, кинематически связанный через вал с платформой, предназначенной для крепления квадрокоптера. Вертикальный вал соединен с электромагнитной муфтой-тормозом. Посредством привода, связанного с горизонтальным валом, платформа с закрепленным квадрокоптером осуществляет наклон относительно оси вала. Затем, после включения тяги квадрокоптера произойдет вращение всей конструкции относительно оси вертикального вала. При этом создается тормозящий момент за счет муфты-тормоза, прямо пропорциональный току, подаваемому на муфту. В зависимости от величины этого момента и конструктивных размеров горизонтального вала можно измерить тяговое усилие, развиваемое квадрокоптером. Достоинством данного стенда является возможность измерять тяговое усилие квадрокоптера при различных углах наклона вектора тяги его винтов.
Недостатком данного стенда для испытания квадрокоптеров является наличие нескольких приводов и электромагнитной муфты-тормоза, что в общем усложняет конструкцию изделия. Конструкция стенда не позволяет при испытании БПЛА в одной плоскости (тангажа) одновременно контролировать наличие паразитной тяги в других плоскостях (крена и рысканья) и главное отсутствует возможность проведения «полевых» испытаний, так как для работы стенда необходим источник питания 220 В.
Наиболее близким по технической сущности является стенд [3] для испытаний беспилотного летательного аппарата вертикального взлета и посадки на режиме висения и взлета. Стенд включает основание, стойку, жестко соединенную с основанием, вертикальный полый вал, который установлен с возможностью перемещения вдоль своей оси, основание выполнено в виде массивного сварного соединения, например, из стали, введена балка прямоугольной формы, закрепленная на верхнем конце вала, два подвижных дугообразных рельса для наклона беспилотного аппарата по углу крена, две пары пластин, например, трапециевидной формы, которые расположены по бокам балки, по две с каждой стороны и закрепленных с помощью болтов, ролики для перемещения по ним рельсов, которые расположены по три штуки между каждой парой пластин, пара вилок, расположенных на концах рельсов и скрепляющие их между собой с помощью болтов и гаек, подвижная разборная люлька, которая соединена с вилками двумя осями, для обеспечения наклона беспилотного аппарата по углу тангажа.
Достоинствами данного стенда являются широкие функциональные возможности для настройки системы автоматической стабилизации БПЛА в плоскостях крена и тангажа режиме висения и взлета.
Недостатком данного стенда является относительная сложность конструкции, а также жесткое крепление стойки (вала), исключающее проверку и настройку системы БПЛА в плоскости рысканья, в том числе, выявление в паразитного движения (дрейфа).
Задачей настоящего изобретения является создание стенда, позволяющего повысить достоверность и оперативность оценки технического состояния БПЛА, снизить риск травмирования оператора при ППП или настройке БПЛА; формализовать процесс ППП; определить фактическую тягу движтелей БПЛА; определить готовность БПЛА к выполнению поставленных задач, благодаря предварительному выявлению сбоев, ошибок настройки управляющих систем БПЛА, тем самым предотвратить или значительно снизить количество авиационных (полетных) инцидентов с участием БПЛА, повысить экономичность и эффективность применения БПЛА при выполнении требуемых задач.
Технический результат, на достижение которого направленно заявленное изобретение, заключается в создании простого, надежного по конструкции и эффективного испытательного стенда, позволяющего оперативно, в условиях отсутствия дополнительных технических средств, самостоятельно провести ППП, испытание работы тяговых движителей и систем БПЛА под нагрузкой, в режиме подачи команд оператором, проверить корректность заданных значений пропорционально-интегральных дифференциальных коэффициентов, подтвердить экспериментальным путем, расчетные характеристики БПЛА (время работы, фактическая величина создаваемой тяги). За счет применения наборной (переменной длины), жесткой, полой внутри стойки проводить ППП БПЛА различной конфигурации. Технический результат достигается благодаря тому, что разработанный стенд испытания и настройки беспилотных летательных аппаратов различной конфигурации содержит тяжелое основание, имеющее усеченную полусферическую форму со ступицей стойки, отклоняющееся в плоскости тангажа и крена, с расположенным по окружности плоской части основания уровнем пузырькового типа с трубчатым корпусом кольцевой формы со шкалой измерения отклонений в плоскости рысканья; вольтметром для измерения напряжения батареи беспилотного летательного аппарата; наборной, жесткой, полой внутри стойкой, оборудованной устройством измерения тяги безменного типа со шкалой; устройством аварийного обесточивания питания беспилотного летательного аппарата; стопорами движения и отклонения полусферического основания стенда.
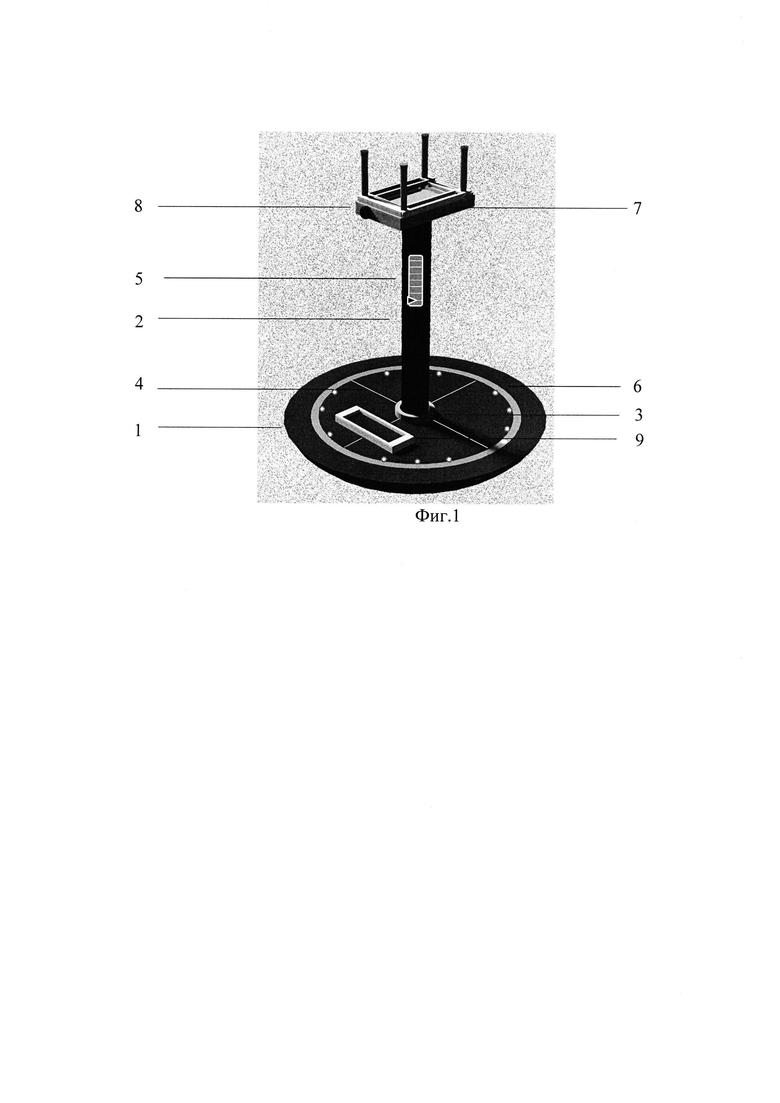
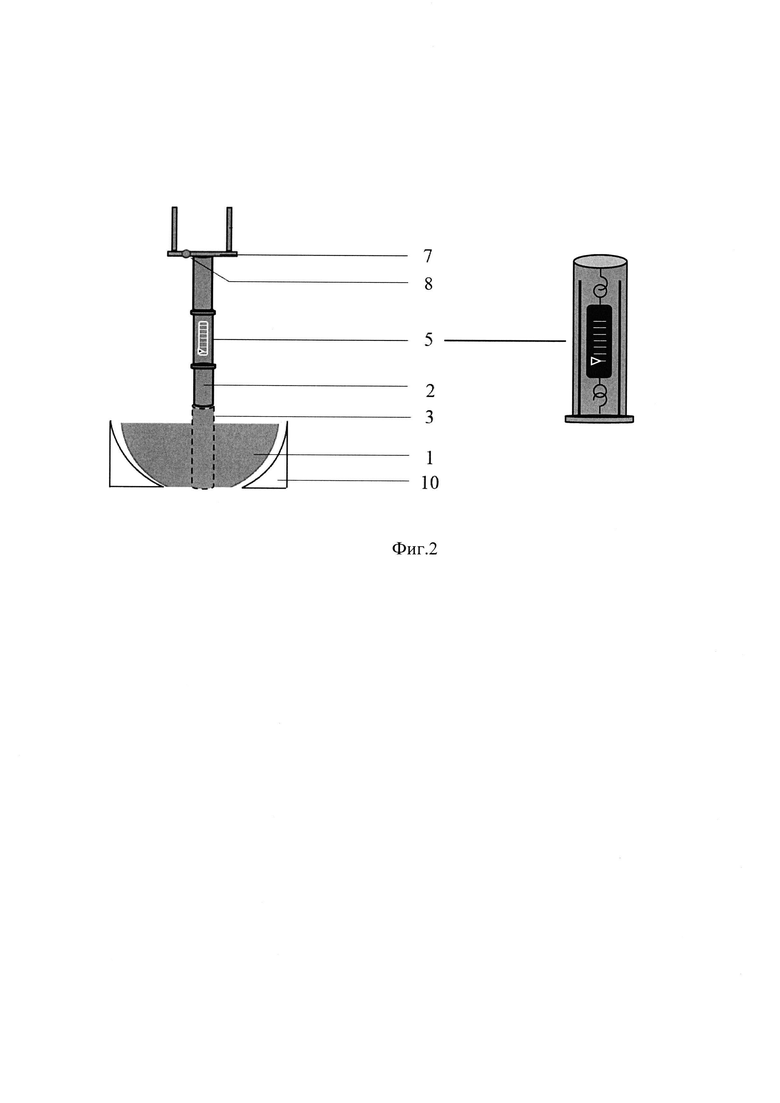
На фиг. 1 и фиг. 2 представлена схема стенда испытания и настройки беспилотных летательных аппаратов различной конфигурации и схема устройства измерения тяги (5).
Стенд испытания и настройки беспилотных летательных аппаратов различной конфигурации содержит (фиг. 1, фиг. 2):
1 - тяжелое основание полусферической усеченной формы, отклоняющееся в плоскости тангажа и крена, со ступицей для вертикальной установки стойки;
2 - наборная, жесткая стойка, полая внутри, с возможностью вращения вокруг своей оси, оборудованная устройством измерения тяги;
3 - подвижное соединение (ступица) обеспечивающее вертикальную установку и вращение стойки;
4 - шкала измерения отклонений в плоскости рысканья;
5 - устройство измерения тяги безменного типа со шкалой;
6 - пузырьковый уровень, с трубчатым корпусом, расположенным по окружности плоской части основания кольцевой формы, измерения наклона в плоскостях тангажа и крена;
7 - платформа с устройством фиксации корпуса БПЛА;
8 - устройство аварийного обесточивания беспилотного летательного аппарата;
9 - вольтметр, с дисплеем, для измерения напряжения батареи БПЛА;
10 - стопоры полусферического основания стенда;
Заявляемое устройство работает следующим образом:
Устанавливаются стопоры фиксации полусферического основания стенда (10), устанавливается необходимое количество наборных элементов в стойку (2) в соответствии с расчетными значениями тяги испытываемого образца БПЛА. Оператор устанавливает БПЛА на платформу (7) и фиксирует корпус БПЛА таким образом, чтобы направление движения БПЛА совпало с нулевым значением шкалы (4). Подключается аккумуляторная батарея БПЛА через устройство аварийного обесточивания беспилотного летательного аппарата (8), вольтметр (9), тяговые винты, проводится внешний осмотр БПЛА и стенда испытания и настройки БПЛА различной конфигурации. Оператор, включает питание аппаратуры управления и БПЛА, в случае успешной самодиагностики полетного контроллера, расфиксирует стопоры (10), проводит включение моторов БПЛА.
После запуска моторов БПЛА, оператор выдает команды на аппаратуре управления БПЛА по углам тангажа и крена, при этом контролирует по измерительному уровню (6) точность направления отклонения БПЛА закрепленного на платформе (7), проверяет по отклику БПЛА на управляющие воздействия, корректность заданных значений пропорционально-интегральных дифференциальных коэффициентов. По шкале (4) контролирует отсутствие паразитного движения (дрейфа) в плоскости рысканья. При успешном завершении данного этапа проверки, оператор переходит к отработке команд аппаратуры управления БПЛА по каналу «газ». При увеличении управляющего сигнала по каналу «газ» оператор контролирует равномерный набор и распределение оборотов движителей, исправность винтомоторных групп, горизонтальное положение БПЛА закрепленного на платформе, при этом задействуется устройство измерения тяги безменного типа со шкалой (5), информация с которого отображается в режиме реального времени и фиксируется оператором. По показаниям вольтметра с дисплеем (9) контролирует значение напряжения батареи БПЛА. На основании полученной информации оператор принимает решение о корректности работы систем БПЛА, соответствии фактических характеристик расчетным, либо необходимости проведения настройки системы управления БПЛА, устранения неисправностей в системах БПЛА. В случае нештатных или аварийных ситуаций оператор обесточивает БПЛА с помощью устройства аварийного отключения электропитания (8).
В настоящее время оператор, в отдельных случаях проводит ППП в полевых условиях, не закрепляя (фиксируя) или держа БПЛА в руках, что создает предпосылку к травмированию оператора.
По своим технико-экономическим преимуществам, по сравнению с известными аналогами, заявляемое устройство позволяет создать простой, эффективный «Стенд для испытания и настройки БПЛА различной конфигурации» за счет введения предлагаемых конструктивных решений, расширить функциональные возможности в ходе предполетных испытаний БПЛА под нагрузкой, в режиме подачи команд управления оператором, что позволяет выявить сбои и ошибки в работе систем управления БПЛА, в частности, неравномерное распределение мощности по ВМГ, паразитную тягу в различных плоскостях движения БПЛА, в том числе дрейф в плоскости рысканья. Заявляемый стенд обладает преимуществами перед известными и позволяет:
- формализовать процесс ППП;
- повысить достоверность оценки и оперативно определить техническое состояние БПЛА, проверить корректность заданных значений пропорционально-интегральных дифференциальных коэффициентов в ходе расширенной ППП под нагрузкой.
-снизить риск травмирования оператора при ППП или настройке БПЛА;
-определить фактическую тягу движителей БПЛА и сравнить с расчетными данными; оперативно определить готовность БПЛА к выполнению поставленных задач, благодаря предварительному выявлению сбоев, ошибок настройки управляющих систем БПЛА, тем самым предотвратить (предупредить) или значительно снизить количество авиационных (полетных) инцидентов с участием (применением) БПЛА, таким образом повысить экономичность, эффективность, массовое совершенство БПЛА, расширить область их применения;
Источники информации, принятые во внимание:
1. Патент RU 2158908, 2009 г.
2. Патент RU 163054, 2016 г.
3. Патент RU 187871, 2019 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНЫЙ НАБОР-КОНСТРУКТОР ДЛЯ ИЗУЧЕНИЯ КОНСТРУКЦИИ И АЭРОДИНАМИКИ ПОЛЁТА МУЛЬТИРОТОРНОГО БЕСПИЛОТНОГО АППАРАТА | 2024 |
|
RU2836491C1 |
| Испытательный стенд для настройки беспилотных летательных аппаратов мультироторного типа | 2023 |
|
RU2804156C1 |
| СТЕНД ДЛЯ КОМПЛЕКСНОГО ТЕСТИРОВАНИЯ И НАСТРОЙКИ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА МУЛЬТИРОТОРНОГО ТИПА | 2024 |
|
RU2826664C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2826651C1 |
| УЧЕБНЫЙ КВАДРОКОПТЕР | 2024 |
|
RU2835694C1 |
| Комплекс для определения пространственных координат удаленного объекта, расположенного на местности | 2020 |
|
RU2744427C1 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| Тренажер авиационный на базе беспилотного летательного аппарата | 2023 |
|
RU2820357C1 |
| ЛЕТАТЕЛЬНЫЕ АППАРАТЫ С НЕСВЯЗАННЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2769822C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
Стенд испытания и настройки беспилотных летательных аппаратов различной конфигурации содержит тяжелое основание с усеченной полусферической формой со ступицей стойки, стойку, платформу с устройством фиксации корпуса беспилотного летательного аппарата, уровень пузырькового типа с трубчатым корпусом кольцевой формы со шкалой измерения отклонений в плоскости рысканья, вольтметр, наборную, жесткую, полую внутри стойку, оборудованную устройством измерения тяги безменного типа со шкалой, устройство аварийного обесточивания питания беспилотного летательного аппарата, стопоры движения и отклонения полусферического основания стенда. Обеспечивается повышение оперативности и надежности предполетной подготовки беспилотных летательных аппаратов различных систем, повышение безопасности оператора, который ее проводит. 2 ил.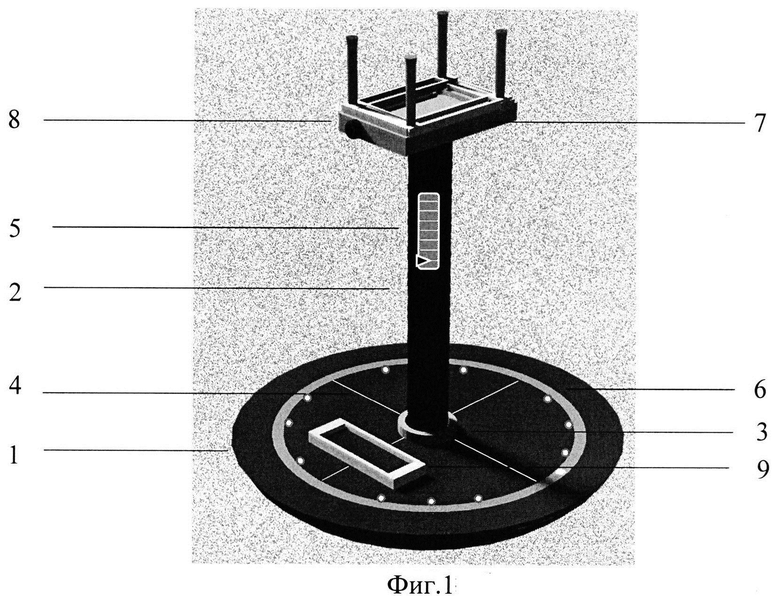
Стенд испытания и настройки беспилотных летательных аппаратов различной конфигурации, содержащий тяжелое основание, стойку, платформу с устройством фиксации корпуса беспилотного летательного аппарата, отличающийся тем, что основание имеет усеченную полусферическую форму со ступицей стойки, отклоняющееся в плоскости тангажа и крена, с расположенным по окружности плоской части основания уровнем пузырькового типа с трубчатым корпусом кольцевой формы со шкалой измерения отклонений в плоскости рысканья; вольтметром для измерения напряжения батареи беспилотного летательного аппарата; наборной, жесткой, полой внутри стойкой, оборудованной устройством измерения тяги безменного типа со шкалой; устройством аварийного обесточивания питания беспилотного летательного аппарата; стопорами движения и отклонения полусферического основания стенда.
| ИССЛЕДОВАТЕЛЬСКИЙ СТЕНД-ИМИТАТОР-ТРЕНАЖЕР "МОНОБЛОК" ПОДГОТОВКИ, КОНТРОЛЯ, ОЦЕНКИ И ПРОГНОЗИРОВАНИЯ КАЧЕСТВА ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ, ОСНАЩЕННЫЙ МЕХАНИЗМАМИ ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ ОПЕРАТОРОВ | 2007 |
|
RU2345421C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| СПОСОБ ВОЗДУШНОГО СТАРТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258639C1 |
| Устройство для счета груженых вагонеток | 1933 |
|
SU35448A1 |
| CN 107677959 A, 09.02.2018. | |||

