ОБЛАСТЬ ТЕХНИКИ
Настоящая заявка относится к области управления тягой и силовой передачей и, в частности, к системе управления и способу управления, подходящим для системы тяги и силовой передачи с синхронным двигателем с постоянными магнитами.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Система тяги и силовой передачи – это силовая система поезда, состоящая в основном из преобразователя и двигателя. Двигатель завершает преобразование электрической энергии в механическую и приводит поезд в движение.
В системе тяги и силовой передачи с синхронным двигателем с постоянными магнитами применяется синхронный двигатель с постоянными магнитами. По сравнению с асинхронным двигателем синхронный двигатель с постоянными магнитами имеет такие характеристики, как высокий коэффициент мощности, низкое тепловыделение, низкий уровень шума и высокую надежность. Применение синхронного двигателя с постоянными магнитами для городской железной дороги в системе тяги и силовой передачи железнодорожных перевозок находится на начальной стадии. Управление системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами связано с множеством технических проблем, которые требуют дальнейшего изучения. Хотя есть сходства между управлением тяговым двигателем и тяговым преобразователем и управлением системой тяги и силовой передачи с асинхронным двигателем, синхронный двигатель с постоянными магнитами также имеет множество уникальных практических проблем.
В настоящее время существующие алгоритмы управления синхронными двигателями с постоянными магнитами для городских железных дорог в основном применяют для работы асинхронную пространственно-векторную широтно-импульсную модуляцию (Space Vector Pulse Width Modulation, SVPWM). В условиях высокой скорости вращения с целью удовлетворения требований к гармоническому составу выходного тока частота коммутации биполярного транзистора с изолированным затвором (Insulated Gate Bipolar Transistor, IGBT) значительно увеличивается, выходные потери возрастают, а стоимость оборудования также увеличивается, чтобы соответствовать требованиям к рассеиванию тепла.
Поскольку синхронный двигатель с постоянным магнитом возбуждается постоянным магнитом, диапазон ослабления магнитного потока является узким, и ослабление магнитного потока затруднено. Более совершенная технология управления ослаблением магнитного потока может значительно улучшить производительность системы без изменения мощности инвертора. В настоящее время многие схемы ослабления потока имеют сложные алгоритмы, в то время как эффективность ослабления потока является низкой, а эффекты слабыми.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Ввиду проблем, связанных со сложными алгоритмами и низкой точностью управления, существующих для управления синхронным двигателем с постоянными магнитами в известном уровне техники, в настоящей заявке предлагается новая система и способ управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами. Данные технические решения заключаются в следующем:
Система управления для системы тяги и силовой передачи с синхронным двигателем с постоянными магнитами для управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, при этом система управления содержит блок измерений и контроллер;
блок измерений подключен к синхронному двигателю с постоянными магнитами и содержит: датчик тока для сбора рабочего тока возбуждения и рабочего создающего крутящий момент тока синхронного двигателя с постоянными магнитами, датчик напряжения для сбора напряжения на входном конденсаторе синхронного двигателя с постоянными магнитами и датчик положения для сбора начального положения ротора и частоты вращения ротора синхронного двигателя с постоянными магнитами;
контроллер содержит:
блок получения команд, выполненный с возможностью получения команды целевого крутящего момента, подаваемой в систему тяги и силовой передачи;
блок вычисления максимального крутящего момента на ампер (MTPA), выполненный с возможностью вычисления целевого значения тока возбуждения и целевого значения создающего крутящий момент тока в соответствии с командой целевого крутящего момента;
блок регулирования, содержащий блок регулирования возбуждения и блок регулирования крутящего момента; причем блок регулирования возбуждения выполнен с возможностью формирования величины регулирования тока возбуждения в соответствии с целевым значением тока возбуждения и рабочим значением тока возбуждения; и при этом блок регулирования крутящего момента выполнен с возможностью формирования величины регулирования создающего крутящий момент тока в соответствии с целевым значением создающего крутящий момент тока и рабочим значением создающего крутящий момент тока;
блок раздельного управления, выполненный с возможностью формирования целевого коэффициента модуляции и частоты модуляции в соответствии с величиной регулирования тока возбуждения и величиной регулирования создающего крутящий момент тока, выводимыми из блока регулирования; и
блок сегментной синхронной модуляции, выполненный с возможностью вывода сигнала управления с PWM-модуляцией для синхронного двигателя с постоянными магнитами в соответствии с целевым коэффициентом модуляции и частотой модуляции, формируемыми блоком раздельного управления.
Предпочтительно контроллер дополнительно содержит блок компенсации ослабления магнитного потока, выполненный с возможностью формирования сигналов компенсации для целевого значения тока возбуждения и целевого значения создающего крутящий момент тока для компенсации обоих.
Предпочтительно контроллер дополнительно содержит блок точного вычисления тока, выполненный с возможностью преобразования целевого значения тока возбуждения и целевого значения создающего крутящий момент тока в точное значение тока возбуждения и точное значение создающего крутящий момент тока; при этом блок регулирования возбуждения формирует величину регулирования тока возбуждения посредством регулирования в соответствии с точным значением тока возбуждения, а блок регулирования крутящего момента формирует величину регулирования создающего крутящий момент тока посредством регулирования в соответствии с точным значением создающего крутящий момент тока.
Предпочтительно контроллер дополнительно содержит блок прямой связи по напряжению, выполненный с возможностью сбора выходных данных блока точного вычисления тока и формирования данных компенсации для целевого крутящего момента.
В настоящей заявке дополнительно предоставляется способ управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, включающий следующие этапы:
преобразование команды целевого крутящего момента системы тяги и силовой передачи, преобразованной в целевое значение тока возбуждения и целевое значение создающего крутящий момент тока;
регулирование и вычисление целевого значения тока возбуждения и целевого значения создающего крутящий момент тока;
разделение целевого значения тока возбуждения и целевого значения создающего крутящий момент тока, формирование целевого коэффициента модуляции в соответствии с целевым значением тока возбуждения и формирование частоты модуляции в соответствии с целевым значением создающего крутящий момент тока; и
использование целевого коэффициента модуляции и частоты модуляции для управления синхронным тяговым двигателем с постоянными магнитами.
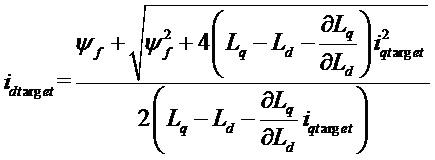
Предпочтительно способ преобразования команды целевого крутящего момента системы тяги и силовой передачи в целевое значение тока возбуждения и целевое значение создающего крутящий момент тока синхронного двигателя с постоянными магнитами является следующим:
в соответствии с:

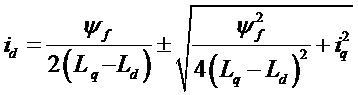
два вышеуказанных уравнения объединяются для вычисления целевого значения тока возбуждения и целевого значения создающего крутящий момент тока;
где 










Предпочтительно, способ дополнительно включает этап: преобразования преобразованного напряжения на входном конденсаторе в соответствии с заданным целевым коэффициентом модуляции; после сравнения с напряжением на входном конденсаторе, полученным путем измерений, формирования величины компенсации создающего крутящий момент тока 

Предпочтительно способ дополнительно включает этап: выполнения точного вычисления целевого значения тока возбуждения и целевого значения создающего крутящий момент тока для получения точного значения тока возбуждения 

использование полученного точного значения тока возбуждения
Предпочтительно способ дополнительно включает этап: вычисления значения компенсации напряжения с использованием точного значения тока возбуждения
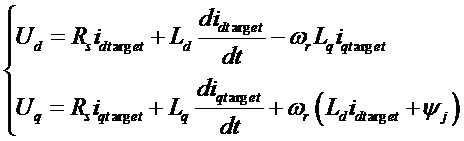
где 





Предпочтительно способ формирования целевого коэффициента модуляции 
где 

способ формирования частоты модуляции 

где 

По сравнению с известным уровнем техники настоящая заявка имеет следующие преимущества и положительные эффекты:
1) В способе управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, предоставленном в настоящей заявке, посредством дальнейших исследований выходных характеристик и противо-электродвижущей силы синхронного двигателя с постоянными магнитами применяется новый способ импульсного управления SVPWM для дальнейшего уменьшения частоты коммутации, уменьшения коммутационных потерь преобразователя, повышения коэффициента полезного действия системы и обеспечения устойчивого режима работы системы при низкой частоте коммутации.
2) В настоящей заявке предлагается новый алгоритм управления ослаблением потока для алгоритма управления. Подбирая выходное напряжение и сравнивая его с входным напряжением, система может устойчиво работать в области ослабления потока, в то время как эффективность ослабления потока может быть повышена.
3) В настоящей заявке предлагается способ точного вычисления тока, который может повысить точность управления ослаблением магнитного потока за счет взаимодействия между блоком точного вычисления тока и блоком компенсации ослабления магнитного потока и улучшить производительность системы без изменения мощности инвертора.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
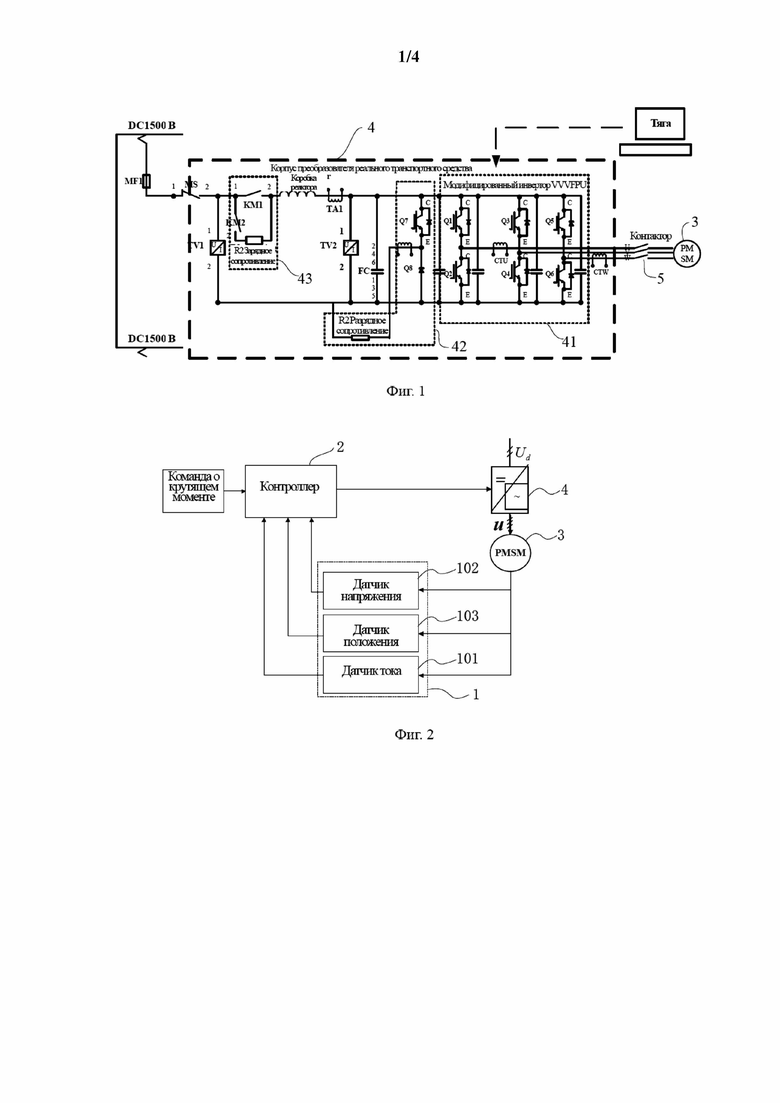
На фиг. 1 представлена схематическая структурная схема системы тяги и силовой передачи с синхронным двигателем с постоянными магнитами;
на фиг. 2 представлена упрощенная структурная схема системы управления согласно настоящей заявке;
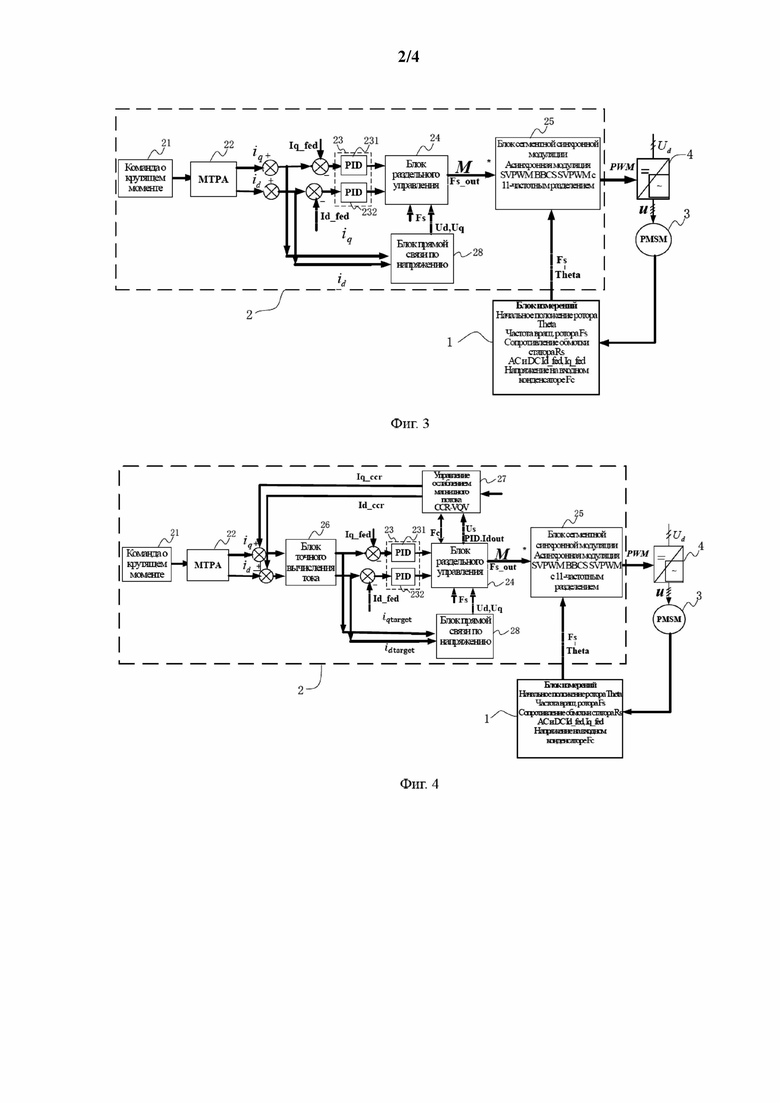
на фиг. 3 представлена схематическая структурная схема системы управления согласно варианту осуществления настоящей заявки;
на фиг. 4 представлена схематическая структурная диаграмма системы управления согласно другому варианту осуществления настоящей заявки;
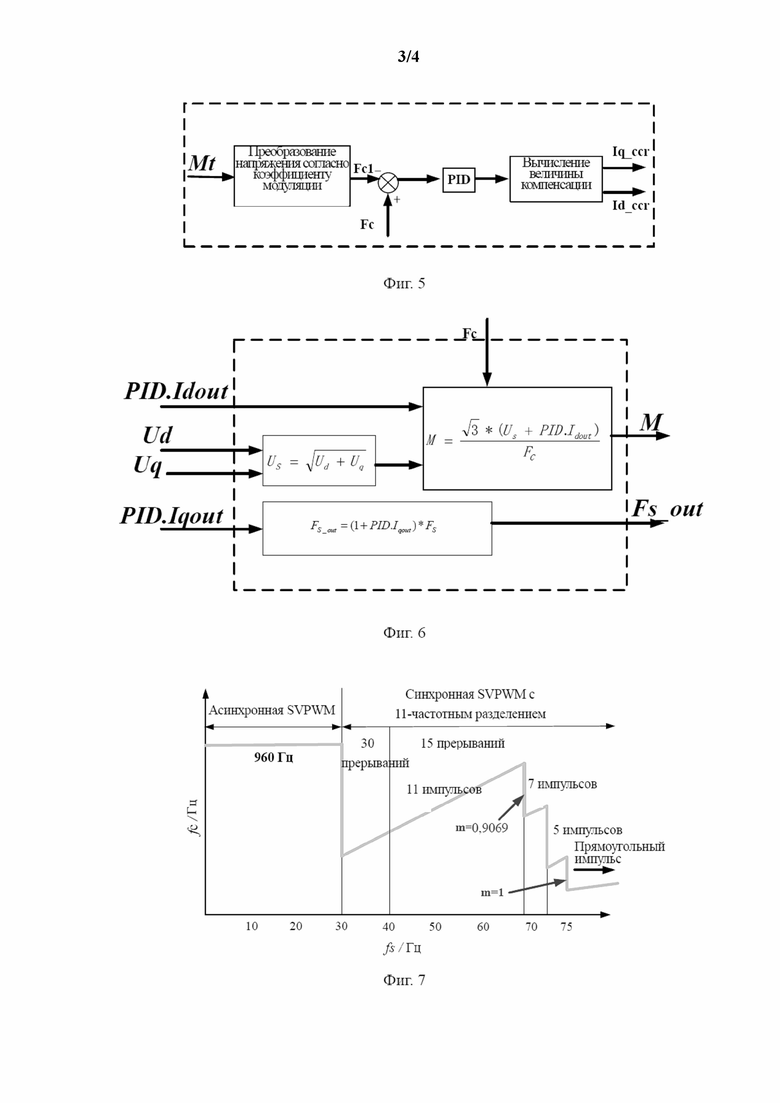
на фиг. 5 представлена принципиальная схема управления ослаблением магнитного потока согласно настоящей заявке;
на фиг. 6 представлена принципиальная схема раздельного управления согласно настоящей заявке;
на фиг. 7 представлена принципиальная схема асинхронной модуляции SVPWM;
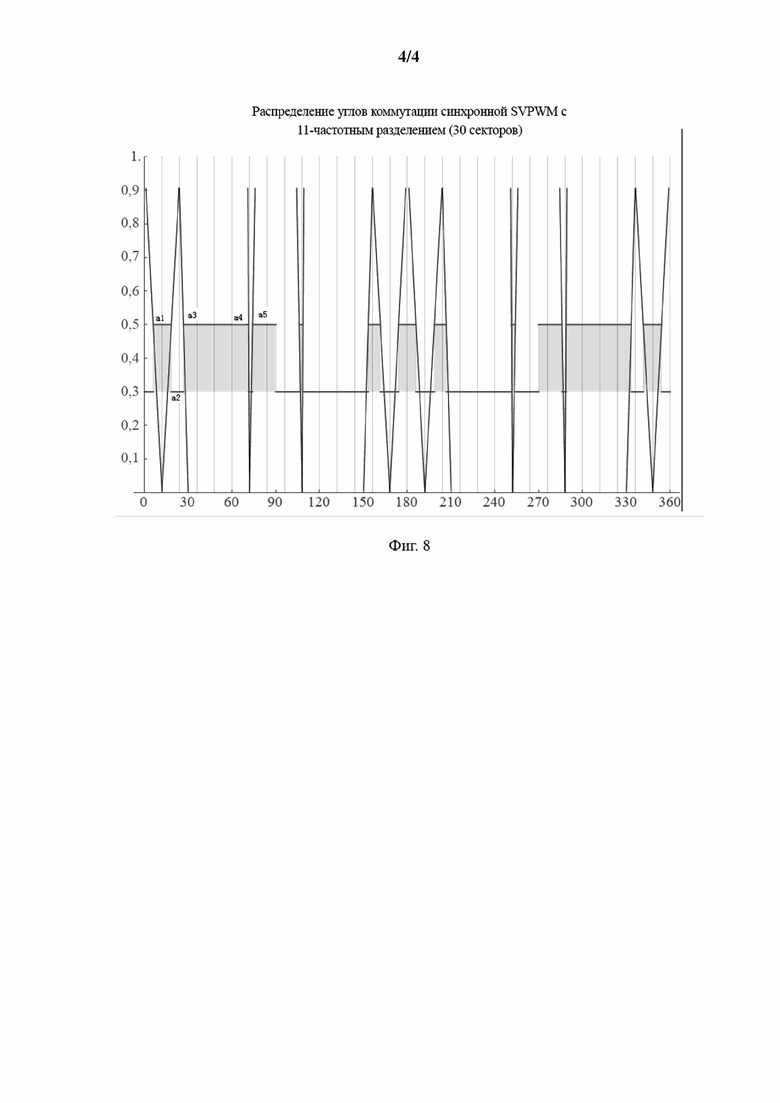
на фиг. 8 представлена диаграмма распределения углов коммутации синхронной SVPWM с 11-частотным разделением согласно настоящей заявке.
На которых
1 – блок измерений; 101 – датчик тока; 102 – датчик напряжения; 103 – датчик положения; 2 – контроллер; 21 – блок получения команд; 22 – блок вычисления MTPA; 23 – блок регулирования; 231 – блок регулирования возбуждения; 232 – блок регулирования крутящего момента; 24 – блок раздельного управления; 25 – блок сегментной синхронной модуляции; 26 – блок точного вычисления тока; 27 – блок компенсации ослабления магнитного потока; 28 – блок прямой связи по напряжению; 3 – синхронный двигатель с постоянными магнитами; 4 – тяговый преобразователь; 41 – модуль IGBT-преобразователя; 42 – модуль импульсного преобразователя постоянного напряжения; 43 – модуль предварительного заряда; 5 – трехфазный управляемый контактор.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее конкретные варианты осуществления настоящей заявки будут описаны далее со ссылкой на графические материалы.
Система управления для системы тяги и силовой передачи с синхронным двигателем с постоянными магнитами, предоставленная в настоящей заявке, может быть применена в системе тяги поезда, приводимой в действие синхронным двигателем с постоянными магнитами, то есть применена в системе тяги и силовой передачи с синхронным двигателем с постоянными магнитами (далее именуемой системой тяги и силовой передачи).
Основная топология системы тяги и силовой передачи с синхронным двигателем с постоянными магнитами проиллюстрирована на фиг. 1, которая содержит тяговый преобразователь 4 и синхронный двигатель 3 с постоянными магнитами (PMSM), причем внутренняя схема тягового преобразователя 4 содержит модуль 41 IGBT-преобразователя, модуль 42 импульсного преобразователя постоянного напряжения и модуль 43 предварительного заряда; и выход тягового преобразователя 4 подключен к синхронному двигателю 3 с постоянными магнитами через трехфазный управляемый контактор 5.
Система управления состоит из блока 1 измерений и контроллера 2. На фиг. 2 представлена упрощенная структурная схема системы управления. На фиг. 2 тяговый преобразователь 4 упрощенно показан в виде условного обозначения. Управляя коммутирующим импульсом модуля 41 IGBT-преобразователя в тяговом преобразователе 4, системой управления управляет системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами.
Как показано на фиг. 2, блок 1 измерений подключен к синхронному двигателю 3 с постоянными магнитами и содержит: датчик 101 тока для сбора рабочего тока возбуждения 




Датчик 101 тока, датчик 102 напряжения и датчик 103 положения подключены к контроллеру 2.
Данные, собранные блоком 1 измерений, могут храниться в нем, и когда любой другой блок должен произвести вычисление, соответствующие данные будут извлечены из блока 1 измерений. Следует отметить, что для удобства иллюстрации только процесс считывания данных между блоком 1 измерений и одним из блоков показан на фиг. 3 и 4. Однако вполне понятно, что, когда любой другой блок должен произвести вычисление, соответствующие данные также могут быть извлечены из блока 1 измерений.
На фиг. 3 представлена схематическая структурная схема системы управления, и она иллюстрирует структурный состав контроллера 2. Контроллер 2 содержит:
блок 21 получения команд, выполненный с возможностью получения команды целевого крутящего момента, подаваемой системе тяги и силовой передачи; команда целевого крутящего момента представляет собой рабочую команду для всей системы тяги и силовой передачи, а цель управления системы управления состоит в том, чтобы обеспечить возможность устойчивой работы системы тяги и силовой передачи работать в соответствии с командой целевого крутящего момента;
блок 22 вычисления максимального крутящего момента на ампер (MTPA), выполненный с возможностью вычисления целевого значения тока возбуждения 
блок 23 регулирования, содержащий: блок 231 регулирования возбуждения и блок 232 регулирования крутящего момента, причем блок 231 регулирования возбуждения выполнен с возможностью формирования величины регулирования тока возбуждения в соответствии с целевым значением тока возбуждения
блок 24 раздельного управления, выполненный с возможностью формирования целевого коэффициента модуляции
блок 25 сегментной синхронной модуляции, выполненный с возможностью вывода сигнала управления с широтно-импульсной модуляцией (PWM) для синхронного двигателя 3 с постоянными магнитами в соответствии с целевым коэффициентом модуляции
На основе вышеупомянутой структуры система управления может выполнять следящее управление синхронным двигателем 3 с постоянными магнитами в соответствии с командой о крутящем моменте.
В качестве дополнительной оптимизации структуры системы управления, как показано на фиг. 4, контроллер 2 дополнительно содержит блок 26 точного вычисления тока, выполненный с возможностью преобразования целевого значения тока возбуждения
В качестве дополнительной оптимизации системы управления, как показано на фиг. 4, контроллер 2 дополнительно содержит блок 27 компенсации ослабления магнитного потока, выполненный с возможностью формирования сигналов компенсации для целевого значения тока возбуждения
Вполне понятно, что блок 26 точного вычисления тока и блок 27 компенсации ослабления магнитного потока взаимодействуют друг с другом для осуществления вычисления точного значения тока. Таким образом, блок 27 компенсации ослабления магнитного потока принимает сигналы, выводимые из блока 24 раздельного управления, и напряжение на входном конденсаторе
В качестве дополнительной оптимизации системы управления контроллер дополнительно содержит блок 28 прямой связи по напряжению, выполненный с возможностью сбора выходных данных блока 26 точного вычисления тока и формирования данных компенсации для целевого крутящего момента. Данные компенсации будут возвращены в блок 24 раздельного управления для вычисления коэффициента модуляции.
В настоящей заявке дополнительно предоставляется способ управления для системы тяги и силовой передачи с синхронным двигателем с постоянными магнитами, и этот способ управления подразделяется на следующие два варианта осуществления в зависимости от того, выполняется ли точное вычисление тока.
Вариант осуществления 1
Способ управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, предусмотренный в этом варианте осуществления, включает следующие этапы:
1) Преобразование целевого параметра управления.
Команда целевого крутящего момента системы тяги и силовой передачи преобразуется в целевое значение тока возбуждения
Команда, полученная системой тяги и силовой передачи, представляет собой команду целевого крутящего момента, которая преобразуется в целевое значение тока возбуждения
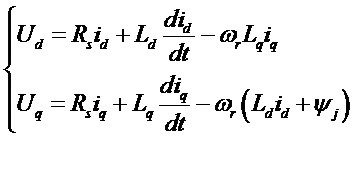
в соответствии с:
два вышеуказанных уравнения объединяются для вычисления целевого значения тока возбуждения
где
2) Регулирование и вычисление целевого значения тока возбуждения и целевого значения создающего крутящий момент тока.
Целевое значение тока возбуждения
В этом варианте осуществления в блоке 23 регулирования применен способ пропорционально-интегрально-дифференциального (PID) регулирования и вычисления, который является хорошо известным способом вычисления и не будет описываться здесь подробно.
3) Разделение целевого значения тока возбуждения и целевого значения создающего крутящий момент тока, формирование целевого коэффициента модуляции в соответствии с целевым значением тока возбуждения и формирование частоты модуляции в соответствии с целевым значением создающего крутящий момент тока.
3.1) Вычисление значения компенсации напряжения.
Целевое значение тока возбуждения
где
3.2) Формирование целевого коэффициента модуляции и частоты модуляции.
Как показано на фиг. 6,
Способ формирования целевого коэффициента модуляции
где
Способ формирования частоты модуляции
где
Окончательно синтез целевого коэффициента модуляции 
4) Сегментная синхронная модуляция.
В соответствии с целевым коэффициентом модуляции
Программа асинхронной модуляции SVPWM принимает информацию о 

Как показано на фиг. 7, целевой коэффициент модуляции, принятый в этом варианте осуществления, составляет 0,906, и модуляция модуля сегментной модуляции синхронной модуляции SVPWM с 11-частотным разделением (базовая стратегия граничного защемления) переключается таким образом, что при коэффициенте модуляции больше 0,906 и попадании в область перемодуляции 4 из 11 импульсов исчезают симметрично и 7 импульсов остаются; при увеличении коэффициента модуляции 2 импульса симметрично исчезают и остается 5 импульсов; и при коэффициенте модуляции больше 1 остается только одиночный прямоугольный импульс.
Как показано на фиг. 7, в диапазоне от 30 Гц до 40 Гц применяется синхронная модуляция I рода с 11-частотным разделением, и каждый период модуляции имеет 30 прерываний; от 40 Гц до прямоугольного сигнала применяется синхронная модуляции II рода с 11-частотным разделением, и каждый период модуляции имеет 15 прерываний; после попадания в область перемодуляции число импульсов симметрично уменьшается с увеличением коэффициента модуляции, и при коэффициенте модуляции больше 1 остается только прямоугольный одиночный импульс.
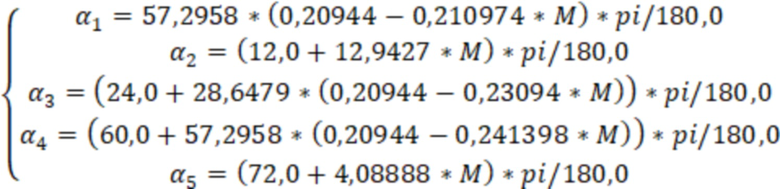
Как показано на фиг. 8, при использовании импульса фазы A синхронной SVPWM с 11-частотным разделением и 30 прерываниями можно получить пять углов коммутации α1, α2, α3, α4 и α5 в пределах 1/4 периода в соответствии со сравнительным значением, соответствующим каждому сектору.
В соответствии с характеристиками синхронной SVPWM (1/2 периода симметрии, 1/4 периода антисимметрии) можно получить ширину импульса в течение всего периода, а затем управлять включением и выключением модуля IGBT-преобразователя. Формула вычисления угла является следующей:
Вариант осуществления 2
Способ управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, предусмотренный в этом варианте осуществления, включает точное вычисление тока и, в частности, включает следующие этапы:
1) Преобразование целевого параметра управления, аналогичное этапу 1) в варианте осуществления 1.
2) Выполнение точного вычисления тока.
Кроме того, преобразованное напряжение на входном конденсаторе 



Принцип управления ослаблением магнитного потока блока 27 компенсации ослабления магнитного потока показан на фиг. 5. Блок 27 компенсации ослабления магнитного потока использует точную величину компенсации напряжения и принимает коэффициент модуляции в качестве конечной цели управления для формирования величин компенсации 
где 
где 

Способ точного вычисления тока является следующим:
выполнение точного вычисления целевого значения тока возбуждения
Для вышеуказанного процесса вполне понятно, что Us и
В котором способ регулирования и вычисления величины компенсации создающего крутящий момент тока
3) Регулирование и вычисление точного значения тока возбуждения и точного значения создающего крутящий момент тока.
Полученные точное значение тока возбуждения
Величина регулирования тока возбуждения
4) Формирование целевого коэффициента модуляции и частоты модуляции.
Как показано на фиг. 6, целевое значение тока возбуждения и целевое значение создающего крутящий момент тока разделяются, целевой коэффициент модуляции формируется в соответствии с целевым значением тока возбуждения, а частота модуляции формируется в соответствии с целевым значением создающего крутящий момент тока.
С целью дополнительного повышения точности вычисления коэффициента модуляции в этом варианте осуществления значение компенсации напряжения вычисляется с использованием точного значения тока возбуждения
где
Способ формирования целевого коэффициента модуляции и частоты модуляции аналогичен этапу 3.2) в варианте осуществления 1 и здесь не будет повторяться.
5) Сегментная синхронная модуляция аналогична этапу 4) в варианте осуществления 1 и здесь не будет повторяться.
Следует отметить, что в данном варианте осуществления применяется точное вычисление тока. В начальный момент времени, то есть во время пуска, все данные по существу равны 0. После пуска получают начальное целевое значение
Способ, описанный в настоящей заявке, используется для управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, который может снизить частоту коммутации, повысить коэффициент полезного действия и улучшить скорость отклика динамической системы на возмущение и устойчивость системы.
Описанные выше варианты осуществления представляют собой только предпочтительные варианты осуществления настоящей заявки, а не ограничения настоящей заявки в других формах. Любой специалист в данной области может изменить или модифицировать техническое содержание, раскрытое выше, в эквивалентные варианты осуществления для применения в других областях. Однако любая простая поправка, эквивалентное изменение или модификация, внесенные в вышеупомянутые варианты осуществления в соответствии с технической сущностью настоящей заявки без отступления от технических решений настоящей заявки, все еще подпадают под объем защиты настоящей заявки.
Изобретение относится к области управления системой тяги и силовой передачи с синхронным двигателем. Технический результат – повышение КПД системы, обеспечение устойчивого режима работы системы, имеющей более низкую частоту коммутации. Система управления содержит блок измерений, контроллер и датчик положения. Контроллер получает команду целевого крутящего момента, подаваемую в систему тяги и силовой передачи, и вычисляет целевые значения тока возбуждения и создающего крутящий момент тока. Блок регулирования крутящего момента используется для формирования величины регулирования создающего крутящий момент тока в соответствии с целевым значением создающего крутящий момент тока и рабочим значением создающего крутящий момент тока, формирования целевого коэффициента модуляции и частоты и, в конечном итоге, вывода моделирующего сигнала управления PWM для синхронного двигателя с постоянными магнитами. 2 н. и 7 з.п. ф-лы, 8 ил.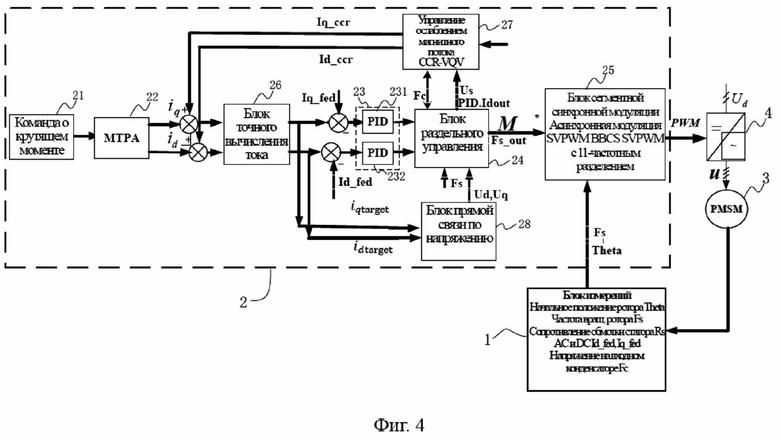
1. Система управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами для управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, отличающаяся тем, что система управления содержит блок измерений и контроллер;
блок измерений подключен к синхронному двигателю с постоянными магнитами и содержит: датчик тока для регистрации рабочего тока возбуждения и рабочего создающего крутящий момент тока синхронного двигателя с постоянными магнитами, датчик напряжения для регистрации напряжения на входном конденсаторе синхронного двигателя с постоянными магнитами и датчик положения для регистрации начального положения ротора и частоты вращения ротора синхронного двигателя с постоянными магнитами;
контроллер содержит:
блок получения команд, выполненный с возможностью получения команды целевого крутящего момента, подаваемой в систему тяги и силовой передачи;
блок вычисления максимального крутящего момента на ампер (MTPA), выполненный с возможностью вычисления целевого значения тока возбуждения и целевого значения создающего крутящий момент тока в соответствии с командой целевого крутящего момента;
блок регулирования, содержащий блок регулирования возбуждения и блок регулирования крутящего момента; причем блок регулирования возбуждения выполнен с возможностью формирования величины регулирования тока возбуждения в соответствии с целевым значением тока возбуждения и рабочим значением тока возбуждения; и при этом блок регулирования крутящего момента выполнен с возможностью формирования величины регулирования создающего крутящий момент тока в соответствии с целевым значением создающего крутящий момент тока и рабочим значением создающего крутящий момент тока;
блок раздельного управления, выполненный с возможностью формирования целевого коэффициента модуляции и частоты модуляции в соответствии с величиной регулирования тока возбуждения и величиной регулирования создающего крутящий момент тока, выводимыми из блока регулирования;
способ формирования целевого коэффициента модуляции 
где 





способ формирования частоты модуляции 

где 

блок сегментной синхронной модуляции, выполненный с возможностью вывода моделирующего сигнала управления широтно-импульсной модуляции (PWM) для синхронного двигателя с постоянными магнитами в соответствии с целевым коэффициентом модуляции и частотой модуляции, формируемыми блоком раздельного управления; и
блок сегментной синхронной модуляции принимает информацию о 

2. Система управления по п.1, отличающаяся тем, что контроллер дополнительно содержит блок компенсации ослабления магнитного потока, выполненный с возможностью формирования сигналов компенсации для целевого значения тока возбуждения и целевого значения создающего крутящий момент тока для компенсации обоих.
3. Система управления по п.1 или 2, отличающаяся тем, что контроллер дополнительно содержит блок точного вычисления тока, выполненный с возможностью преобразования целевого значения тока возбуждения и целевого значения создающего крутящий момент тока в точное значение тока возбуждения и точное значение создающего крутящий момент тока; причем блок регулирования возбуждения формирует величину регулирования тока возбуждения посредством регулирования в соответствии с точным значением тока возбуждения, и при этом блок регулирования крутящего момента формирует величину регулирования создающего крутящий момент тока посредством регулирования в соответствии с точным значением создающего крутящий момент тока.
4. Система управления по п.3, отличающаяся тем, что контроллер дополнительно содержит блок прямой связи по напряжению, выполненный с возможностью получения выходных данных блока точного вычисления тока, и формирует данные компенсации для целевого крутящего момента.
5. Способ управления системой тяги и силовой передачи с синхронным двигателем с постоянными магнитами, отличающийся тем, что включает следующие этапы:
преобразование команды целевого крутящего момента системы тяги и силовой передачи в целевое значение тока возбуждения и целевое значение создающего крутящий момент тока;
регулирование и вычисление целевого значения тока возбуждения и целевого значения создающего крутящий момент тока;
разделение целевого значения тока возбуждения и целевого значения создающего крутящий момент тока, формирование целевого коэффициента модуляции в соответствии с целевым значением тока возбуждения и формирование частоты модуляции в соответствии с целевым значением создающего крутящий момент тока; и
использование целевого коэффициента модуляции и частоты модуляции для управления синхронным тяговым двигателем с постоянными магнитами;
способ преобразования команды целевого крутящего момента системы тяги и силовой передачи в целевое значение тока возбуждения и целевое значение создающего крутящий момент тока синхронного двигателя с постоянными магнитами является следующим:
в соответствии с:

два вышеуказанных уравнения объединяются для вычисления целевого значения тока возбуждения и целевого значения создающего крутящий момент тока;
где 










6. Способ управления по п.5, отличающийся тем, что дополнительно включает этап преобразования преобразованного напряжения на входном конденсаторе в соответствии с заданным целевым коэффициентом модуляции; после сравнения с напряжением на входном конденсаторе, полученным путем измерений, формирования величины компенсации создающего крутящий момент тока 

7. Способ управления по п.6, отличающийся тем, что дополнительно включает этап выполнения точного вычисления целевого значения тока возбуждения и целевого значения создающего крутящий момент тока для получения точного значения тока возбуждения 

использование полученного точного значения тока возбуждения
8. Способ управления по п.6, отличающийся тем, что дополнительно включает этап вычисления значения компенсации напряжения с использованием точного значения
где 

9. Способ управления по п.8, отличающийся тем, что способ формирования целевого коэффициента модуляции
где
способ формирования частоты модуляции
где
| CN 101529714 A, 09.09.2009 | |||
| CN 103532461 A, 22.01.2014 | |||
| CN 107592047 A, 16.01.2018 | |||
| ИНДИКАТОР ОТКЛОНЕНИЯ | 0 |
|
SU174854A1 |
| Устройство для управления многофазным синхронным электродвигателем | 1979 |
|
SU917292A1 |

