Область техники, к которой относится изобретение
Представленное раскрытие относится к области технологий беспилотных летательных аппаратов и, в частности, к способу управления полетом беспилотного летательного аппарата и к устройству управления полетом беспилотного летательного аппарата.
Уровень техники
Беспилотный летательный аппарат (Unmanned Aerial Vehicle, UAV) является беспилотным летательным аппаратом, управляемым дистанционным радиоуправляемым устройством и устройством, содержащим в себе программное управление. UAV широко используются при защите растительности, в городском управлении, геологии, метеорологии, энергоснабжении, при устранении последствий катастроф, видеосъемке и в прочих областях.
При развитии технологии защиты растительности с помощью UAV защита растительности с использованием UAV обладает характеристиками малого повреждения зерновых культур и высокого показателя использования пестицидов. Все больше и больше крестьянских хозяйств и фермеров используют UAV для операций по защите растительности; особенно, UAV используют для распыления пестицидов и для распыления удобрений.
На предшествующем уровне техники, когда UAV используют в операциях по защите растительности, для управления маршрутом полета могут применяться следующие два способа: ручное управление высотой или скоростью полета UAV, чтобы управлять полетом UAV вдоль соответствующей траектории, и загрузка или установка маршрута на земле, с тем, чтобы UAV автоматически выполнял соответствующий маршрут для решения задачи операции.
Первый упомянутый выше способ может гибко управляться вручную при операциях на малых площадях, но требует от оператора принимать участие во всем процессе, чтобы корректировать полет UAV с помощью восприятия человеком. Он легко может допустить отклонение UAV от маршрута полета при выполнении задачи на относительно небольшом участке.
При втором упомянутом выше способе операция выполняется точно и не требует участия человека, но для нее необходимо заранее провести обзор, причем требования к обзору и картографированию высокие и существующая технология не может быть технологией, используемой в реальном времени, в случае реальных изменений операции.
Сущность изобретения
По меньшей мере некоторые из вариантов осуществления настоящего изобретения представляют способ управления полетом UAV и устройство управления полетом UAV, чтобы преодолеть упомянутую выше проблему или чтобы, по меньшей мере, частично решить упомянутую выше проблему.
Чтобы решить упомянутую выше проблему, в варианте осуществления настоящего изобретения представляется способ управления полетом UAV. Способ содержит этапы, на которых: определяют начальную позицию полета, в которой UAV находится в настоящий момент, и направление головной части UAV; взлетают из начальной позиции полета и летят вдоль прямой линии в направлении головной части; и, когда во время полета UAV принимают команду корректировки маршрута, корректируют маршрут полета UAV в соответствии с командой корректировки маршрута.
В необязательном варианте осуществления перед этапом определения начальной позиции полета, в которой UAV находится в настоящий момент, и направления головной части UAV, способ дополнительно содержит этап, на котором: принимают параметр скорости полета и параметр дальности полета.
В необязательном варианте осуществления этап взлета из начальной позиции полета и полета вдоль прямой линии в направлении головной части содержит этап, на котором: взлетают из начальной позиции полета и летят вдоль прямой линии со скоростью, определяемой параметром скорости полета, в направлении головной части.
В необязательном варианте осуществления команда корректировки маршрута является командой, посланной устройством дистанционного управления, и устройство дистанционного управления формирует команду корректировки маршрута следующими способами, при которых: обнаруживают операцию корректировки воздушного маршрута, выполняемую оператором на устройстве дистанционного управления; определяют, по меньшей мере, направление корректировки авиамаршрута или поле корректировки авиамаршрута, соответствующие операции корректировки авиамаршрута; и формируют команду корректировки маршрута в соответствии, по меньшей мере, с направлением корректировки авиамаршрута или полем корректировки авиамаршрута.
В необязательном варианте осуществления операция корректировки авиамаршрута содержит по меньшей мере одну из следующих операций: операция скольжения оператора по движку на сенсорном экране устройства дистанционного управления; операция щелчка оператором по физической кнопке направления устройства дистанционного управления; операция движения оператора рокером управления устройства дистанционного управления; и сенсорная операция оператора на кнопке направления на сенсорном экране устройства дистанционного управления.
В необязательном варианте осуществления на этапе, когда во время полета UAV принимают команду корректировки маршрута , корректировка авиамаршрута UAV в соответствии с командой корректировки маршрута содержит этапы, на которых: когда принимают команду корректировки маршрута во время полета UAV, управляют UAV для полета в контрольную точку, соответствующую направлению корректировки авиамаршрута и полю корректировки авиамаршрута; получают координаты контрольной точки; определяют координаты целевой точки в соответствии с углом направления и параметром дальности полета, причем угол направления определяют начальной позицией полета и координатами контрольной точки; получают курсовой угол UAV в реальном времени; вычисляют отклонение авиамаршрута в соответствии с углом направления и курсовым углом; управляют UAV для выравнивания с целевой точкой в соответствии с отклонением авиамаршрута; и вычисляют расстояние между контрольной точкой и целевой точкой и управляют UAV для полета к целевой точке.
В необязательном варианте осуществления на этапе, когда во время полета UAV принимают команду корректировки маршрута, корректировка авиамаршрута UAV в соответствии с командой корректировки маршрута содержит этапы, на которых: когда во время полета UAV принимают команду корректировки маршрута, управляют UAV для полета к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута; получают координаты контрольной точки; получают курсовой угол UAV в реальном времени; вычисляют отклонение авиамаршрута в соответствии с углом направления и курсовым углом, причем угол направления определяется начальной позицией полета и координатами контрольной точки; управляют UAV для выравнивания с направлением, указанным углом направления, в соответствии с отклонением авиамаршрута; вычисляют расстояние между начальной позицией полета и контрольной точкой; и управляют полетом UAV в соответствии с остающимся расстоянием, где оставшееся расстоянию определяется параметром дальности полета и расстоянием между начальной точкой полета и контрольной точкой.
В другом варианте осуществления настоящего изобретения дополнительно представляется устройство управления полетом UAV. Устройство содержит:
компонент определения информации, выполненный с возможностью определения начальной позиции полета, в которой UAV находится в настоящий момент, и направления головной части UAV; компонент полета, выполненный с возможностью взлета из начальной позиции полета и полета вдоль прямой линии в направлении головной части; и компонент корректировки направления, выполненный с возможностью корректировки авиамаршрута UAV в соответствии с командой корректировки маршрута, когда во время полета UAV принимают команду корректировки маршрута.
В необязательном варианте осуществления устройство дополнительно содержит компонент приема параметров, выполненный с возможностью приема параметра скорости полета и параметра дальности полета.
В необязательном варианте осуществления компонент полета дополнительно выполнен с возможностью вылета из начальной позиции полета и полета вдоль прямой линии со скоростью, определяемой параметром скорости полета, в направлении головной части.
В необязательном варианте осуществления команда корректировки маршрута является командой, посланной устройством дистанционного управления, и устройство дистанционного управления формирует команду корректировки маршрута следующими способами, содержащими этапы, на которых: обнаруживают операцию корректировки авиамаршрута, выполняемую оператором на устройстве дистанционного управления; определяют по меньшей мере направление корректировки авиамаршрута или поле корректировки авиамаршрута, соответствующие операции корректировки авиамаршрута; и формируют команду корректировки маршрута в соответствии по меньшей мере с направлением корректировки авиамаршрута или полем корректировки авиамаршрута.
В необязательном варианте осуществления операция корректировки авиамаршрута содержит по меньшей мере одну из следующих операций: операция скольжения, выполняемая оператором на движке сенсорного экрана устройства дистанционного управления; операция щелчка оператором по физической кнопке направления, выполняемая на устройстве дистанционного управления; операция движения оператором рокера управления на устройстве дистанционного управления; и операция касания оператором кнопки направления сенсорного экрана, выполняемая на устройстве дистанционного управления.
В необязательном варианте осуществления компонент корректировки направления содержит: первый субкомпонент контрольной точки полета, выполненный с возможностью управления при приеме команды корректировки маршрута во время полета UAV, чтобы UAV летел к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута; первый субкомпонент получения координат контрольной точки, выполненный с возможностью получения координат контрольной точки; субкомпонент определения координат целевой точки, выполненный с возможностью определения координат целевой точки в соответствии с углом направления и параметром дальности полета, причем угол направления определяется начальной позицией полета и координатами контрольной точки; первый субкомпонент получения курсового угла, выполненный с возможностью получения курсового угла UAV в реальном времени; первый субкомпонент вычисления отклонения авиамаршрута, выполненный с возможностью вычисления отклонения авиамаршрута в соответствии с углом направления и курсовым углом; первый субкомпонент выравнивания по направлению, выполненный с возможностью управления UAV для выравнивания с целевой точкой в соответствии с отклонением авиамаршрута; и первый субкомпонент управления полетом, выполненный с возможностью вычисления расстояния между контрольной точкой и целевой точкой и управления UAV для полета к целевой точке.
В необязательном варианте осуществления компонент корректировки направления содержит: второй субкомпонент полета к контрольной точке, выполненный с возможностью управления во время полета UAV при приеме команды корректировки маршрута для полета UAV к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута; второй субкомпонент получения координат контрольной точки, выполненный с возможностью получения координат контрольной точки; второй субкомпонент получения курсового угла в реальном времени, выполненный с возможностью получения курсового угла UAV в реальном времени; второй субкомпонент вычисления отклонения авиамаршрута, выполненный с возможностью вычисления отклонения авиамаршрута в соответствии с углом направления и курсовым углом, причем угол направления определяется начальной позицией полета и координатами контрольной точки; второй субкомпонент выравнивания по направлению, выполненный с возможностью управления UAV для выравнивания с направлением, указанным углом направления в соответствии с отклонением авиамаршрута; субкомпонент вычисления расстояния, выполненный с возможностью вычисления расстояния между начальной позицией полета и контрольной точкой; и второй субкомпонент управления полетом, выполненный с возможностью управления полетом UAV в соответствии с оставшимся расстоянием, причем оставшееся расстояние определяется параметром дальности полета и расстоянием между начальной позицией полета и контрольной точкой.
По меньшей мере, некоторые варианты осуществления настоящего изобретения содержат следующие преимущества:
Когда UAV определяет начальную позицию полета и направление головной части UAV, UAV может взлетать непосредственно из начальной позиции полета и лететь вдоль прямой линии в направлении, указываемом головной частью. При приеме команды корректировки маршрута во время полета UAV, авиамаршрут UAV может корректироваться в соответствии с командой корректировки маршрута. По меньшей мере, некоторые из вариантов осуществления настоящего изобретения заставляют UAV лететь вдоль прямой линии, как требует оператор, в комбинации ручной точной коррекции регулировки с автоматической навигацией UAV; во время полета оператор может корректировать авиамаршрут посредством устройства дистанционного управления без проведения съемки и картографирования, когда обнаруживается, что UAV отклоняется от курса; оператор может заставить UAV лететь точно по требуемой прямой линии посредством простых операций, тем самым упрощая процесс работы и способствуя адаптируемости к изменениям UAV.
Краткое описание чертежей
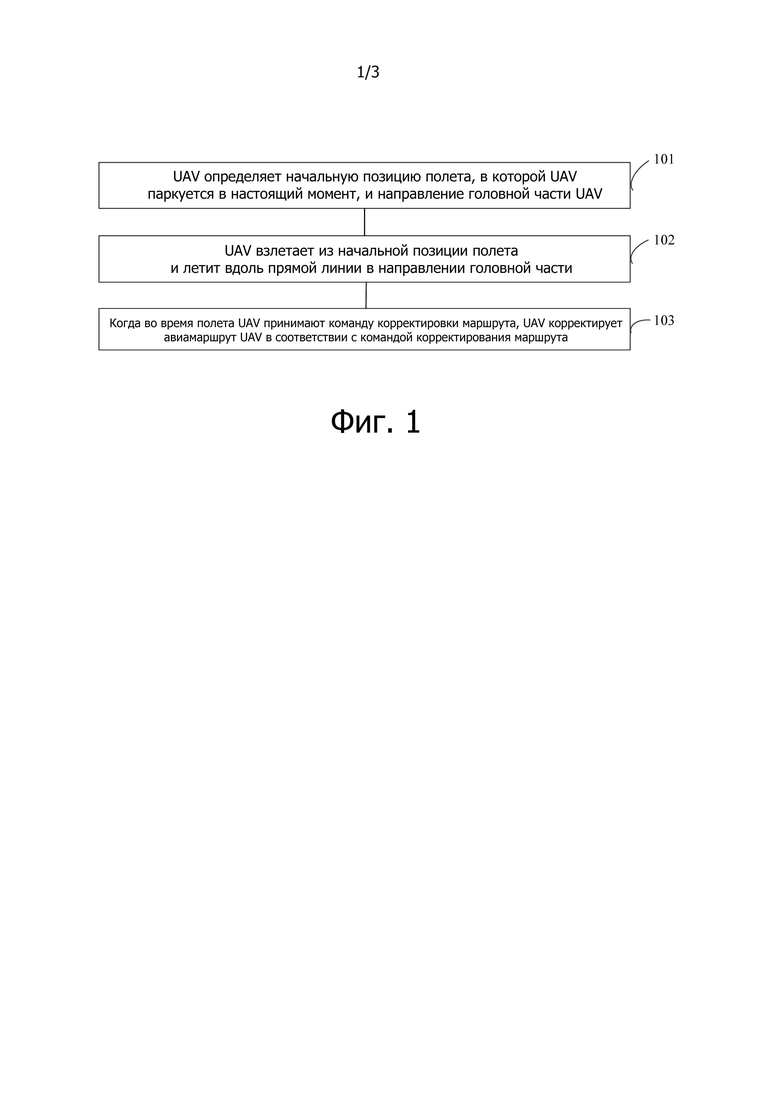
Фиг. 1 - блок-схема последовательности выполнения операций способа управления полетом UAV в соответствии с вариантом осуществления настоящего изобретения.
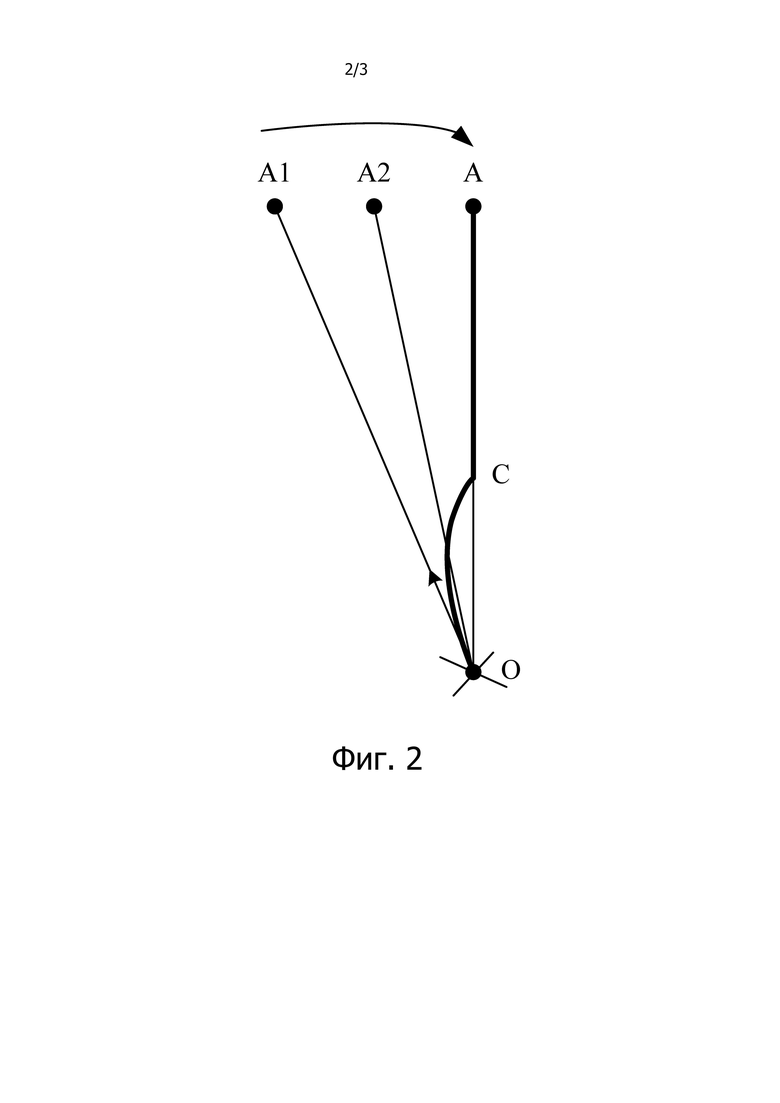
Фиг. 2 – схематичное представление маршрута полета UAV при способе управления полетом UAV в соответствии с необязательным вариантом осуществления настоящего изобретения.
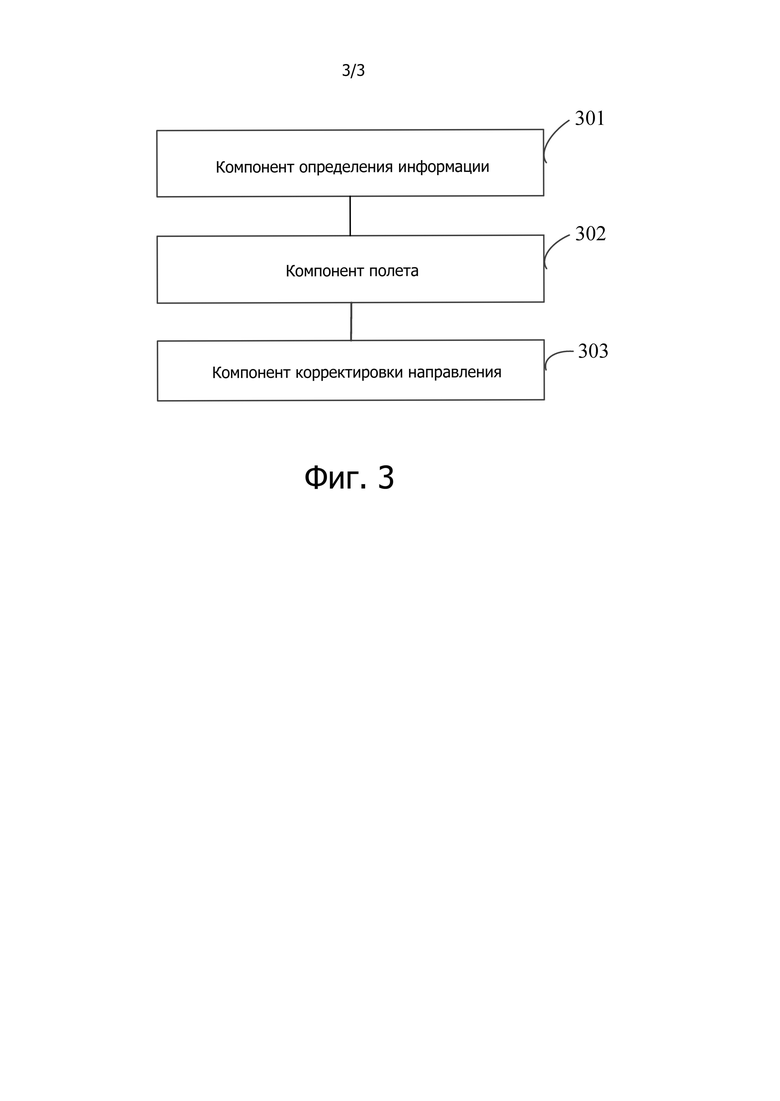
Фиг. 3 - структурная блок-схема устройства управления полетом UAV в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание
Чтобы сделать вышеупомянутые задачи, функции и преимущества настоящего изобретения более очевидными и понятыми, ниже настоящее изобретение дополнительно описывается подробно со ссылкой на чертежи и конкретные способы реализации.
На фиг. 1 показана блок-схема последовательности выполнения операций способа управления полетом UAV в соответствии с вариантом осуществления настоящего изобретения. Способ конкретно может содержать нижеследующие этапы.
На этапе 101 UAV определяет начальную позицию полета, в которой UAV припаркован в настоящий момент, и направление головной части UAV.
В конкретной реализации начальная позиция полета может быть текущей позицией парковки UAV. В операции по защите растительности позиция может быть определена заранее как позиция парковки UAV, то есть, позиция, в которой припаркован UAV. Если UAV находится не в заданном положении парковки, оператор может поместить или управлять UAV, чтобы перелететь в позицию парковки.
В конкретной реализации перед началом полета UAV начальная позиция полета и направление головной части UAV могут быть определены устройством позиционирования, расположенным на UAV, таким как компас и глобальная система навигации и определения местоположения (Global Positioning System, GPS).
На практике, начальная позиция полета UAV может быть выражена в виде широты и долготы, а направление головной части UAV может быть представлено курсовым углом.
В необязательном варианте осуществления перед этапом 101 способ может дополнительно содержать этап, на котором UAV принимает параметр скорости полета и параметр дальности полета.
Конкретно, перед выполнением оператором операции, параметр скорости полета и параметр дальности полета, требуемые для текущей операции, могут быть введены заранее через устройство дистанционного управления.
Параметр скорости полета относится к скорости полета, с которой летит UAV.
Параметр дальности полета относится к линейному расстоянию, на котором UAV управляется и которое UAV должен пролететь.
После приема параметра скорости полета и параметра дальности полета, введенных оператором, устройство дистанционного управления может послать параметр скорости полета и параметр дальности полета на UAV через компонент связи.
В конкретной реализации устройство дистанционного управления может быть устройством с экраном сенсорного дисплея или другими удаленными контроллерами, имеющими физические кнопки ввода и другие функциональные физические кнопки, которые не ограничиваются в представленном варианте осуществления настоящего изобретения.
На этапе 102 UAV взлетает из начальной позиции полета и летит вдоль прямой линии в направлении головной части.
Когда после определения начальной позиции полета, в которой UAV припаркован в настоящий момент, и направления головной части UAV, UAV начинает управляться, UAV может взлететь из начальной позиции полета и лететь вдоль прямой линии в направлении головной части UAV.
В необязательном варианте осуществления, после того как определен параметр скорости полета, этап 102 может дополнительно содержать этап, на котором UAV взлетает из начальной позиции полета и летит вдоль прямой линии со скоростью, определяемой параметром скорости полета, в направлении, указываемом головной частью.
В конкретной реализации, когда UAV начинает управляться после определения начальной позиции полета, в которой UAV припаркован в настоящий момент, и направления, указываемого головной частью UAV, маршрут полета, определенный для UAV, может быть следующим: начальная позиция полета в качестве начальной точки и траектория, как маршрут полета, начинается от начальной точки в направлении, указываемом головной частью UAV.
На практике, после того как UAV занимает начальную позицию полета в качестве начальной точки, UAV может определить виртуальную точку на прямой линии вдоль направления, указываемого головной частью UAV, в качестве конечной точки и прямая линия, определяемая начальной точкой и конечной точкой, принимается в качестве маршрута полета.
Например, как показано на схеме маршрута полета UAV на фиг. 2, если точка O является начальной точкой, оператор может поместить UAV в точку O или управлять UAV таким образом, чтобы лететь в точку O, и корректировать направление головной части, и, если направление головной части указывает на точку A1, UAV может принять прямую линию O-A1 в качестве маршрута полета.
В примерном варианте осуществления настоящего изобретения, после определения маршрута полета UAV может иметь возможность лететь вдоль прямого маршрута полета, и когда UAV отклоняется от прямого маршрута полета, UAV должен как можно скорее вернуться к прямой линии, поддерживая, таким образом, малое отклонение.
На этапе 103, при приеме во время полета UAV команды корректировки маршрута, UAV корректирует авиамаршрут UAV в соответствии с командой корректировки маршрута.
В конкретной реализации, поскольку направление головной части корректируется за счет восприятия оператора, ручная настройка направления головной части предрасположена к отклонению, так что направление головной части не может быть точно выровнено с направлением, требующимся для оператора, приводя в результате к тому, что маршрут полета, определенный для UAV, является несовместным с маршрутом полета, фактически требуемым оператором. Например, как показано на фиг. 2, предполагается, что маршрут полета, фактически требуемый оператором, является прямой линией, состоящей из отрезков О-А, и когда оператор корректирует направление головной части, направление головной части выравнивается с точкой A1, так чтобы маршрут полета, определенный для UAV, являлся прямой линией, состоящей из отрезка O-A1, который отклоняется от маршрута О-А, по которому оператору фактически необходимо лететь. В этом случае оператор может послать команду корректировки маршрута UAV через устройство дистанционного управления и UAV может автоматически скорректировать маршрут во время полета UAV в соответствии с командой корректировки маршрута. Например, команда корректировки маршрута, посланная оператором, может использоваться для уведомления UAV об отклонении от точки A1 к точке A, например, к точке A2, и UAV в соответствии с командой корректировки маршрута после приема команды корректировки маршрута может направиться к точке А.
В способе реализации устройство дистанционного управления формирует команду корректировки маршрута следующими способами.
Устройство дистанционного управления может обнаруживать операцию корректировки авиамаршрута, выполняемую оператором на устройстве дистанционного управления. Устройство дистанционного управления может определить по меньшей мере направление корректировки авиамаршрута или поле корректировки авиамаршрута в соответствии с операцией корректировки авиамаршрута и сформировать команду корректировки маршрута в соответствии, по меньшей мере, с направлением корректировки авиамаршрута или полем корректировки авиамаршрута.
Конкретно, во время полета UAV, когда оператор замечает, что UAV отклоняется от авиамаршрута, устройством дистанционного управления может быть послана операция корректировки авиамаршрута.
В способе реализации операция корректировки авиамаршрута может содержать операцию скольжения оператором по движку на сенсорном экране на устройстве дистанционного управления. Например, движок на сенсорном экране может отображаться на пульте управления устройства управления в форме индикатора выполнения. Когда оператор скользит по индикатору выполнения, тем самым определяется, что оператор посылает операцию корректировки авиамаршрута.
Как вариант, движок на сенсорном экране может отображаться в горизонтальном направлении. Когда оператор скользит влево, это указывает, что оператор хочет управлять UAV так, чтобы сместить его влево. Когда оператор скользит вправо, это указывает, что оператор хочет управлять UAV так, чтобы сместить его вправо.
Как вариант, движок на сенсорном экране может быть разделен на многочисленные мелкие ячейки, причем каждая маленькая ячейка заранее устанавливается так, чтобы соответствовать некоторой амплитуде смещения UAV, и амплитуда смещения UAV может определяться в соответствии с количеством мелких ячеек, по которым оператор скользит на движке сенсорного экрана, что является расстоянием, на которое UAV отклоняется от текущего местоположения.
В другом способе реализации операция корректировки авиамаршрута может содержать операцию щелчка оператором по физической кнопке направления на устройстве дистанционного управления.
Конкретно, оператор может также инициировать операцию корректировки авиамаршрута с помощью физической кнопки направления на устройстве дистанционного управления. Например, на устройстве дистанционного управления могут иметься физические кнопки направления для четырех направлений, вверх, вниз, влево и вправо. Когда оператор щелкает по физической кнопке в направлении влево, это указывает, что оператор хочет управлять UAV так, чтобы сместить его влево. Когда оператор щелкает по физической кнопке в направлении вправо, это указывает, что оператор хочет управлять UAV, чтобы сместить его вправо.
Как вариант, щелчок может также быть заранее установлен так, чтобы соответствовать некоторой амплитуде смещения UAV, и амплитуда смещения UAV на устройстве дистанционного управления может определяться в соответствии с количеством щелчков, сделанных оператором в одном и том же направлении, что является расстоянием, на которое UAV отклонился от текущего местоположения.
В другом способе реализации операция корректировки авиамаршрута может также содержать сенсорную операцию оператора на кнопке направления на сенсорном экране устройства дистанционного управления, то есть, физические кнопки направления вверх-вниз, влево и вправо в предыдущем варианте осуществления могут отображаться на экране способом виртуальных кнопок на интерфейсе управления устройства дистанционного управления. Когда оператор щелкает по виртуальной кнопке в направлении влево, это указывает, что оператор хочет управлять UAV так, чтобы сместить его влево. Когда оператор щелкает по виртуальной кнопке в направлении вправо, это указывает, что оператор хочет управлять UAV так, чтобы сместить его вправо.
Как вариант, щелчок также может быть заранее настроен так, чтобы соответствовать некоторой амплитуде смещения UAV, и амплитуда смещения UAV может быть определена в соответствии с количеством щелчков оператором в одном и том же направлении на устройстве дистанционного управления, что является расстоянием, на которое UAV отклоняется от текущего местоположения.
В другом способе реализации операция корректировки авиамаршрута может также содержать операцию движения оператором рокера управления устройства дистанционного управления. Когда оператор перемещает рокер управления влево, это указывает, что оператор хочет управлять UAV так, чтобы сместить его влево. Когда оператор перемещает рокер управления вправо, это указывает, что оператор хочет управлять UAV так, чтобы сместить его вправо.
Как вариант, операция с движением рокера также может быть заранее настроена так, чтобы соответствовать некоторой амплитуде смещения UAV, и амплитуда смещения UAV может быть определена в соответствии с количеством перемещений оператором в одном и том же направлении на устройстве дистанционного управления, что является расстоянием, на которое UAV отклоняется от текущего местоположения.
Следует заметить, что варианты осуществления настоящего изобретения не ограничиваются упомянутой выше операцией корректировки авиамаршрута и специалисты в данной области техники могут выполнить и другие операции для достижения цели управления направлением, которые не ограничиваются вариантом осуществления настоящего изобретения.
Когда устройство дистанционного управления обнаруживает операцию корректировки авиамаршрута, выполняемую оператором на устройстве дистанционного управления, по меньшей мере, направление корректировки авиамаршрута или поле корректировки авиамаршрута могут быть определены в соответствии с направлением перемещения и расстоянием перемещения оператором движка на сенсорном экране, или направлением, задаваемым физической кнопкой направления или виртуальной кнопкой направления и количеством щелчков или в соответствии с направлением перемещения и количеством перемещений рокера.
Например, если пользователь щелкает по физической кнопке один раз в направлении влево на устройстве дистанционного управления, предполагая, что амплитуда смещения, соответствующая одному щелчку, составляет 5 метров, направление перемещения, соответствующее операции корректировки авиамаршрута, может быть получено как направление влево и поле корректировки авиамаршрута составляет 5 метров.
После того, как устройство дистанционного управления определяет по меньшей мере направление корректировки авиамаршрута или поле корректировки авиамаршрута, корректируемые UAV, команда корректировки авиамаршрута может быть сформирована в соответствии, по меньшей мере, с направлением корректировки авиамаршрута или полем корректировки авиамаршрута и команда корректировки авиамаршрута посылается на UAV через компонент связи, так что UAV может скорректировать авиамаршрут в соответствии, по меньшей мере, с направлением корректировки авиамаршрута или полем корректировки авиамаршрута.
В способе реализации устройство дистанционного управления может формировать команду корректировки маршрута, соответствующую направлению корректировки авиамаршрута, таким образом после приема команды корректировки маршрута UAV смещается на заданную амплитуду в направлении корректировки авиамаршрута.
В другом способе реализации устройство дистанционного управления может формировать команду корректировки маршрута в соответствии с направлением корректировки авиамаршрута и амплитудой корректировки авиамаршрута и, таким образом, после приема команды корректировки маршрута UAV смещается на расстояние, соответствующие амплитуде корректировки авиамаршрута в направлении корректировки авиамаршрута. На практике, во время операции UAV, когда оператор обнаруживает, что UAV отклоняется от авиамаршрута, UAV может быть скорректирован на правильный авиамаршрут после многочисленных коррекций. Например, как показано на фиг. 2, авиамаршрут, требуемый пользователем, чтобы управлять UAV, является прямой линией О-А, но из-за погрешности операции оператор выравнивает головную часть UAV с направлением A1, так чтобы маршрут полета, определяемый UAV, был прямой линией O-A1, и UAV летит вдоль прямой линии O-A1. В этот момент оператор обнаруживает, что UAV летит не в направлении О-А и решает, что это отклонение от маршрута. Оператор может послать команду корректировки маршрута на UAV с помощью устройства дистанционного управления, чтобы указать сдвиг, например, вправо, чтобы сместиться в позицию A2. UAV перемещает в позицию A2 после получения команды корректировки маршрута, так чтобы UAV летел по прямой линии к направлению O-A2, и оператор непрерывно корректирует авиамаршрут в соответствии с описанным выше способом. Когда UAV смещается в точку C на фиг. 2, UAV начинает лететь в направлении C-A. На фиг. 2 утолщенный участок является траекторией полета при текущем движении UAV.
В необязательном варианте осуществления этап 103 может содержать нижеследующие подэтапы.
На подэтапе S11 при приеме команды корректировки маршрута во время полета UAV, UAV летит к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута.
Конкретно, во время полета UAV, после того как UAV принимает команду корректировки маршрута, посланную устройством дистанционного управления, UAV может направляться к контрольной точке, а именно, к точке C, как показано на фиг. 2, соответствующей направлению корректировки авиамаршрута и полю корректировки авиамаршрута, которые передаются в команде корректировки маршрута, или соответствующей направлению корректировки авиамаршрута, которое передается в команде корректировки маршрута, и заданному полю корректировки авиамаршрута.
Например, после того как оператор управляет рокером управления, чтобы заставить UAV лететь в точку C на фиг. 2, оператор отпускает рокер и UAV может принять точку C в качестве контрольной точки.
На подэтапе S12 UAV получает координаты контрольной точки.
После того, как контрольная точка определена, UAV с помощью устройства позиционирования, содержащегося в UAV, может получить координаты контрольной точки, такие как координаты точки C на фиг. 2.
На подэтапе S13 UAV определяет координаты целевой точки в соответствии с углом направления и параметром дальности полета и угол направления определяется начальной позицией полета и координатами контрольной точки.
После того, как UAV определил координаты контрольной точки, UAV может определить угол направления между начальной позицией полета и опорной точкой, соответствующей координатам контрольной точки. UAV может вычислить координаты целевой точки в соответствии с координатами начальной позиции полета, углом направления и параметром дальности полета.
Например, как показано на фиг. 2, угол направления OC может быть определен в соответствии с точкой O и точкой C и затем координаты точки A могут быть получены в соответствии с углом направления OC, координатами точки O и параметром дальности полета.
На подэтапе S14 UAV получает курсовой угол UAV в реальном времени.
В конкретной реализации UAV может получить курсовой угол UAV в реальном времени с помощью компаса UAV.
На подэтапе S15 UAV вычисляет отклонение авиамаршрута в соответствии с углом направления и курсовым углом.
После получения курсового угла и угла направления UAV может вычислить разность между курсовым углом и углом направления, чтобы получить разность в качестве отклонения авиамаршрута.
На подэтапе S16 UAV управляется, чтобы произвести выравнивание с целевой точкой в соответствии с отклонением авиамаршрута.
После получения отклонения авиамаршрута UAV может прибавить курсовой угол в реальном времени к отклонению авиамаршрута, чтобы получить фактический угол маршрута полета. Затем UAV может скорректировать направление головной части UAV, чтобы выровнять его с фактическим углом маршрута полета, так чтобы UAV был выровнен с целевой точкой.
На подэтапе S17 UAV вычисляет расстояние между контрольной точкой и целевой точкой, и UAV управляют так, чтобы он летел к целевой точке.
После того, как UAV выровнен с целевой точкой, UAV может вычислить расстояние между контрольной точкой и целевой точкой, чтобы получить оставшееся расстояние текущего маршрута полета, и затем UAV могут управлять так, чтобы он летел на оставшееся расстояние со скоростью, определяемой параметром скорости полета.
Например, как показано на фиг. 2, после того как головная часть UAV выровнена с точкой A, UAV может получить расстояние от точки C до точки A и UAV управляют таким образом, чтобы лететь на это расстояние, и, когда UAV достигает точки A, текущая операция маршрута завершается.
В другом необязательном варианте осуществления этап 103 может содержать следующие подэтапы.
На подэтапе S21 при приеме команды корректировки маршрута во время полета UAV, UAV летит к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута.
На подэтапе S22 UAV может получить координаты контрольной точки.
На подэтапе S23 UAV может получить курсовой угол UAV в реальном времени.
На подэтапе S24 UAV может вычислить отклонение авиамаршрута в соответствии с углом направления и курсовым углом.
На подэтапе S25 UAV управляют таким образом, чтобы выровнять его с направлением, указываемым углом направления, соответствующим отклонению авиамаршрута.
На подэтапе S26 UAV может вычислить расстояние между начальной позицией полета и контрольной точкой.
На подэтапе S27 полет UAV управляется в соответствии с остающимся расстоянием, определяемым параметром дальности полета и расстоянием между начальной позицией полета и контрольной точкой.
Вариант осуществления подэтапов S21-S27 отличается от варианта осуществления подэтапов S11-S17, описанного выше, за исключением того, что настоящий вариант осуществления не получает точно координаты целевой точки. Когда UAV вычисляет отклонение авиамаршрута, UAV может определить отклонение авиамаршрута в соответствии с разностью между углом направления и курсовым углом. После того, как UAV получает отклонение авиамаршрута, UAV может прибавить курсовой угол к отклонению авиамаршрута, чтобы получить фактический угол маршрута полета. Затем UAV может скорректировать направление головной части UAV, чтобы выровнять его с фактическим углом маршрута полета. Фактический угол маршрута полета является направлением вектора, определяемым начальной позицией полета и координатами контрольной точки. При вычислении остающегося расстояния UAV может сначала вычислить дальность полета между начальной позицией полета и контрольной точкой, и затем вычислить оставшееся расстояние согласно параметру дальности полета и расстоянию полета, и далее UAV может управляться таким образом, чтобы лететь со скоростью, определяемой параметром скорости полета для остающегося расстояния.
По меньшей мере в некоторых вариантах осуществления настоящего изобретения, когда UAV определяет начальную позицию полета и направление головной части UAV, UAV может напрямую начать полет из начальной позиции полета и лететь вдоль прямой линии в направлении, указываемом головной частью. Во время полета, если UAV принимает команду корректировки маршрута, авиамаршрут UAV может быть скорректирован в соответствии с командой корректировки маршрута. По меньшей мере, в некоторых вариантах осуществления настоящего изобретения UAV заставляют лететь вдоль прямой линии, требуемой оператором, в сочетании с изменением ручной точной коррекции и автоматической навигацией UAV; во время полета, когда обнаруживается, что UAV отклонился от курса, оператор может корректировать авиамаршрут через устройство дистанционного управления, не проводя обзора и картографирования; и оператор может заставить UAV лететь вдоль требуемой прямой линии с высокой точностью, используя простые операции и упрощая, таким образом, процесс работы и способствуя адаптируемости к изменениям UAV.
Следует заметить, что, для вариантов осуществления способа с целью упрощения описания, все они выражаются как последовательность сочетаний действий, но специалисты в данной области техники должны понимать, что варианты осуществления настоящего изобретения не ограничиваются описанной последовательностью действий, поскольку в соответствии с определенными вариантами осуществления настоящего изобретения некоторые этапы могут выполняться в другой последовательности или одновременно. Далее, специалисты в данной области техники должны также понимать, что все варианты осуществления, представленные в описании, являются необязательными вариантами осуществления и содержащиеся в них действия не обязательно требуются, по меньшей мере, в некоторых из вариантов осуществления настоящего изобретения.
На фиг. 3 показана структурная блок-схема устройства управления полетом UAV, соответствующая настоящему изобретению. Устройство может содержать: компонент 301 определения информации, компонент 302 полета и компонент 303 корректировки направления.
Компонент 301 определения информации выполнен с возможностью определения начальной позиции полета, в которой UAV припаркован в настоящий момент, и направления головной части UAV.
Компонент 302 полета выполнен с возможностью взлета из начальной позиции полета и полета вдоль прямой линии в направлении, определяемом направлением головной части.
Компонент 303 корректировки направления выполнен с возможностью корректировки маршрута при приеме команды корректировки маршрута во время полета UAV по авиамаршруту UAV, соответствующему команде корректировки маршрута.
В необязательном варианте осуществления устройство дополнительно содержит компонент приема параметров.
Компонент приема параметров выполнен с возможностью приема параметра скорости полета и параметра дальности полета.
В необязательном варианте осуществления компонент 302 полета дополнительно выполнен с возможностью:
взлета из начальной позиции полета и полета вдоль прямой линии со скоростью, определяемой параметром скорости полета, в направлении, определяемом направлением головной части.
В необязательном варианте осуществления команда корректировки маршрута является командой, посылаемой устройством дистанционного управления, и формирует с помощью устройства дистанционного управления команду корректировки маршрута способами, содержащими этапы, на которых:
обнаруживают операцию корректировки авиамаршрута, выполняемую оператором на устройстве дистанционного управления;
определяют, по меньшей мере, направление корректировки авиамаршрута или поле корректировки авиамаршрута, соответствующие операции корректировки авиамаршрута; и
формируют команду корректировки маршрута в соответствии, по меньшей мере, с направлением корректировки авиамаршрута или полем корректировки авиамаршрута.
В необязательном варианте осуществления операция корректировки авиамаршрута содержит по меньшей мере одну из следующих операций:
операция скольжения оператором по движку на сенсорном экране на устройстве дистанционного управления;
операция щелчка оператором по физической кнопке направления на устройстве дистанционного управления;
операция движения оператором рокера устройства дистанционного управления; и
сенсорная операция оператором на кнопке направления на сенсорном экране устройства дистанционного управления.
В необязательном варианте осуществления компонент 303 корректировки направления содержит: первый субкомпонент полета к контрольной точке, первый субкомпонент получения координат контрольной точки, субкомпонент определения координат целевой точки, первый субкомпонент получения курсового угла в реальном времени, первый субкомпонент вычисления отклонения авиамаршрута, первый субкомпонент выравнивания направления, и первый субкомпонент управления полетом.
Первый субкомпонент полета к контрольной точке выполнен с возможностью управления при приеме команды корректировки маршрута во время полета UAV, так чтобы UAV летел к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута во время полета.
Первый субкомпонент получения координат контрольной точки выполнен с возможностью получения координат контрольной точки.
Субкомпонент определения координат целевой точки выполнен с возможностью определения координат целевой точки в соответствии с углом направления и параметром дальности полета, и угол направления определяется начальным положением полета и координатами контрольной точки.
Первый субкомпонент сбора получения курсового угла в реальном времени выполнен с возможностью получения курсового угла UAV в реальном времени.
Первый субкомпонент вычисления отклонения авиамаршрута выполнен с возможностью вычисления отклонения авиамаршрута в соответствии с углом направления и курсовым углом.
Первый субкомпонент выравнивания по направлению выполнен с возможностью управления UAV для выравнивания его с целевой точкой в соответствии с отклонением авиамаршрута.
Первый субкомпонент управления полетом выполнен с возможностью вычисления расстояния между контрольной точкой и целевой точкой и управления UAV для полета к целевой точке.
В другом необязательном варианте осуществления компонент корректировки направления содержит: второй субкомпонент полета к контрольной точке, второй субкомпонент получения координат опорной точки, второй субкомпонент получения курсового угла в реальном времени, второй субкомпонент вычисления отклонения авиамаршрута, второй субкомпонент выравнивания по направлению, субкомпонент вычисления расстояния и второй субкомпонент управления полетом.
Второй субкомпонент полета к контрольной точке выполнен с возможностью управления UAV при приеме команды корректировки маршрута во время полета UAV для полета к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута.
Второй субкомпонент получения координат контрольной точки выполнен с возможностью получения координат контрольной точки.
Второй субкомпонент получения курсового угла в реальном времени выполнен с возможностью получения курсового угла UAV в реальном времени.
Второй субкомпонент вычисления отклонения авиамаршрута выполнен с возможностью вычисления отклонения авиамаршрута в соответствии с углом направления и курсовым углом, причем угол направления определяется начальной позицией полета и координатами контрольной точки.
Второй субкомпонент выравнивания по направлению выполнен с возможностью управления UAV для выравнивания с направлением, указанным углом направления в соответствии с отклонением авиамаршрута.
Субкомпонент вычисления расстояния выполнен с возможностью вычисления расстояния между начальным положением полета и контрольной точкой.
Второй субкомпонент управления полетом выполнен с возможностью управления полетом UAV в соответствии с оставшимся расстоянием, причем оставшееся расстояние определяется параметром дальности полета и расстоянием между начальным положением полета и контрольной точкой.
Различные варианты осуществления, представленные в настоящем описании, описываются способом нарастания, когда каждый вариант осуществления сосредотачивается на отличиях от других вариантов осуществления и идентичные или схожие части различных вариантов осуществления могут ссылаться друг на друга.
Специалист в данной области техники должен понимать, что, по меньшей мере, некоторые варианты осуществления настоящего изобретения могут быть представлены как способ, устройство или компьютерный программный продукт. Таким образом, по меньшей мере, некоторые варианты осуществления настоящего изобретения могут принимать формы полностью аппаратных вариантов осуществления, вариантов осуществления, полностью основанных на программном обеспечении, или вариантов осуществления, объединяющих программное и аппаратное обеспечение. Кроме того, по меньшей мере, некоторые варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, реализуемого на одном или более доступных для компьютера носителях запоминающего устройства (в том числе, но не ограничиваясь только этим, на дисковой памяти, CD-ROM, оптической памяти и т. п.), содержащих компьютерно доступные управляющие программы.
По меньшей мере, некоторые варианты осуществления настоящего изобретения описываются со ссылкой на блок-схемы и/или блок-схемы последовательности выполнения операций способа, оконечного устройства (системы) и компьютерный программный продукт в соответствии, по меньшей мере, с некоторыми вариантами осуществления настоящего изобретения. Следует понимать, что каждый поток и/или блок в блок-схемах последовательности выполнения операций и/или блок-схемах и в сочетании потоков и/или блоков в блок-схемах последовательности выполнения операций и/или блок-схемах могут быть реализованы командами компьютерной программы. Эти команды компьютерной программы могут быть предоставлены для универсального компьютера, специализированного компьютера, встроенного процессора или процессоров других программируемых оконечных устройств обработки данных, чтобы сформировать машину так, чтобы устройство для осуществления функций, назначенных в одном или более потоках блок-схем последовательности выполнения операций и/или одном или более блоках блок-схем, формировалось посредством команд, выполняемые компьютерами или процессорами других программируемых оконечных устройств обработки данных.
Эти команды компьютерной программы могут храниться в считываемой компьютером памяти, способной управлять компьютерами или другими программируемыми устройствами обработки данных для работы в определенном режиме, так чтобы произведенный продукт, содержащий механизм команд, формировался посредством команд, хранящихся в считываемой компьютером памяти, и механизм команд осуществляет функции, обозначенные в одном или более потоках блок-схем последовательности выполнения операций и/или в одном или более блоках блок-схем.
Эти команды компьютерной программы могут также загружаться в компьютеры или другие программируемые оконечного устройства обработки данных, так чтобы обработка, осуществляемая компьютерами, производилась, выполняя последовательность этапов операций на компьютерах или других программируемых оконечных устройствах, и поэтому команды, выполняемые на компьютерах или других программируемых оконечных устройствах, обеспечивают этап выполнения функций, определяемых в одном или более потоках блок-схем последовательности выполнения операций и/или в одном или более блоках блок-схем.
Хотя были описаны необязательные варианты осуществления, по меньшей мере, некоторых вариантов осуществления настоящего изобретения, специалисты в данной области техники, зная основную творческую концепцию, могут осуществить дополнительные изменения и модификации вариантов осуществления. Поэтому, прилагаемая формула изобретения предназначена интерпретироваться как содержащая необязательные варианты осуществления и все изменения и модификации, попадающие в рамки объема, по меньшей мере, некоторых вариантов осуществления настоящего изобретения.
Наконец, также следует заметить, что родственные термины, такие как "первый" и "второй", используются просто, чтобы отличить здесь один объект или операцию от другого объекта или операции, и не требуют или не подразумевают обязательного существования любой такой фактической взаимосвязи или порядка между этими объектами или операциями. Кроме того, термины "содержат", "включают в себя" или любые другие их вариации предназначены охватывать неисключающее включение, так чтобы процесс, способ, изделие или оконечное устройство, содержащие ряд элементов, не только включали в себя эти элементы, но также включали в себя и те элементы, которые явно не перечисляются, или содержали элементы, свойственные таким процессу, способу, изделию или оконечному устройству. При условии отсутствия добавочных ограничений, не исключается, что дополнительные идентичные элементы существуют в процессе, способе, изделии или оконечном устройстве, содержащих элементы, определяемые высказыванием типа "содержащий …".
Вышесказанное является подробным описанием способа и устройства для управления полетом UAV, представляемыми настоящим изобретением. Принцип и способ реализации настоящего изобретения описываются здесь в конкретных примерах. Описание вариантов осуществления служит только для оказания помощи в понимании способа настоящего изобретения и его базовых идей. Дополнительно, для специалистов в данной области техники, в соответствии с идеей настоящего изобретения, будут иметь место изменения конкретных способов реализации и объема применения. В заключение, приведенное выше описание не должно рассматриваться как ограничение настоящего изобретения.
Промышленная применяемость
Как описано выше, по меньшей мере некоторые варианты осуществления настоящего изобретения представляют способ управления полетом UAV и соответствующее устройство управления полетом UAV, обладающие следующими положительными свойствами: UAV летит вдоль прямой линии, как требуется оператором, в сочетании с изменением ручной точной коррекции и автоматической навигацией UAV; во время полета оператор может корректировать авиамаршрут через устройство дистанционного управления без обзора и картографирования, когда обнаруживает, что UAV отклоняется от курса; и оператор может заставить UAV лететь точно вдоль требуемой прямой линии посредством простых операций, упрощая, таким образом, процесс работы и способствуя адаптируемости к изменениям UAV.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАБИЛИЗАЦИЕЙ СОЗДАЮЩЕГО ТЯГУ УСТРОЙСТВА | 2020 |
|
RU2796698C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| Способ борьбы с артиллерией противника | 2018 |
|
RU2694421C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2475802C1 |
Группа изобретений относится к способу и устройству управления полетом беспилотного летательного аппарата (UAV). Для управления полетом определяют начальную позицию полета, в которой UAV паркуется в настоящий момент, и направление головной части UAV, взлетают из начальной позиции полета и летят вдоль прямой линии в направлении головной части, при приеме команды корректировки маршрута во время полета UAV корректируют авиамаршрут UAV в соответствии с командой корректировки маршрута. Устройство управления полетом UAV содержит компонент определения начальной позиции полета, в которой UAV паркуется в настоящий момент, и направления головной части UAV, компонент полета, выполненный с возможностью взлета из начальной позиции полета и полета вдоль прямой линии в направлении головной части, компонент корректировки направления. Обеспечивается дистанционное управление беспилотным летательным аппаратом. 2 н. и 12 з.п. ф-лы, 3 ил.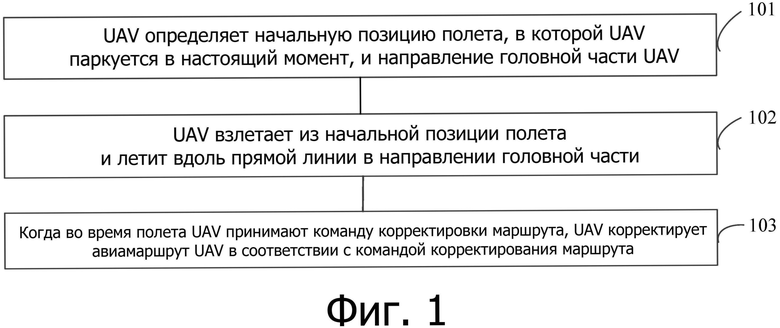
1. Способ управления полетом беспилотного летательного аппарата (UAV), содержащий этапы, на которых:
определяют начальную позицию полета, в которой UAV паркуется в настоящий момент, и направление головной части UAV;
взлетают из начальной позиции полета и летят вдоль прямой линии в направлении головной части; и
при приеме команды корректировки маршрута во время полета UAV корректируют авиамаршрут UAV в соответствии с командой корректировки маршрута.
2. Способ по п. 1, в котором перед этапом определения начальной позиции полета, в которой UAV паркуется в настоящий момент, и направления головной части UAV, способ дополнительно содержит этап, на котором:
принимают параметр скорости полета и параметр дальности полета.
3. Способ по п. 2, в котором этап взлета из начальной позиции полета и полета вдоль прямой линии в направлении головной части содержит этап, на котором:
взлетают из начальной позиции полета и летят вдоль прямой линии со скоростью, определяемой параметром скорости полета, в направлении головной части.
4. Способ по п. 2 или 3, в котором команда корректировки маршрута является командой, посылаемой устройством дистанционного управления, и устройство дистанционного управления формирует команду корректировки маршрута следующими способами, при которых:
обнаруживают операцию корректировки авиамаршрута, выполняемую оператором на устройстве дистанционного управления;
определяют, по меньшей мере, направление корректировки авиамаршрута или поле корректировки авиамаршрута, соответствующие операции корректировки авиамаршрута; и
формируют команду корректировки маршрута, соответствующую, по меньшей мере, направлению корректировки авиамаршрута или полю корректировки авиамаршрута.
5. Способ по п. 4, в котором операция корректировки авиамаршрута содержит по меньшей мере одну из следующих операций:
операция скольжения оператором по движку на сенсорном экране устройства дистанционного управления;
операция щелчка оператором по физической кнопке направления устройства дистанционного управления;
операция движения оператором рокера управления устройства дистанционного управления; и
сенсорная операция оператора на кнопке направления сенсорного экрана устройства дистанционного управления.
6. Способ по п. 4, в котором этап, который, когда во время полета UAV принимают команду корректировки маршрута, корректируют авиамаршрут UAV в соответствии с командой корректировки маршрута, содержит этапы, на которых:
когда во время полета UAV принимают команду корректировки маршрута, управляют UAV для полета к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута;
получают координаты контрольной точки;
определяют координаты целевой точки в соответствии с углом направления и параметром дальности полета, причем угол направления определяется начальной позицией полета и координатами контрольной точки;
получают курсовой угол в реальном времени UAV;
вычисляют отклонение авиамаршрута в соответствии с углом направления и курсовым углом;
управляют UAV для выравнивания с целевой точкой в соответствии с отклонением авиамаршрута; и
вычисляют расстояние между контрольной точкой и целевой точкой и управляют UAV для полета к целевой точке.
7. Способ по п. 4, в котором этап, который, когда во время полета UAV принимают команду корректировки маршрута, корректируют авиамаршрут UAV в соответствии с командой корректировки маршрута, содержит этапы, на которых:
когда во время полета UAV принимают команду корректировки маршрута, управляют UAV для полета к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута;
получают координаты контрольной точки;
получают угловой курс UAV в реальном времени;
вычисляют отклонение авиамаршрута в соответствии с углом направления и курсовым углом, причем угол направления определяется начальным положением полета и координатами контрольной точки;
управляют UAV для выравнивания с направлением, указанным углом направления, соответствующим отклонению авиамаршрута;
вычисляют расстояние между начальной позицией полета и контрольной точкой; и
управляют полетом UAV в соответствии с оставшимся расстоянием, причем оставшееся расстояние определяется параметром дальности полета и расстоянием между начальной позицией полета и контрольной точкой.
8. Устройство управления полетом беспилотного летательного аппарата (UAV), содержащее:
компонент определения информации, выполненный с возможностью определения начальной позиции полета, в которой UAV паркуется в настоящий момент, и направления головной части UAV;
компонент полета, выполненный с возможностью взлета из начальной позиции полета и полета вдоль прямой линии в направлении головной части; и
компонент корректировки направления, выполненный с возможностью корректировки авиамаршрута UAV в соответствии с командой корректировки маршрута, когда во время полета UAV принимают команду корректировки маршрута.
9. Устройство по п. 8, дополнительно содержащее:
компонент приема параметров, выполненный с возможностью приема параметра скорости полета и параметра дальности полета.
10. Устройство по п. 9, в котором компонент полета дополнительно выполнен с возможностью:
взлета из начальной позиции полета и полета вдоль прямой линии со скоростью, определяемой параметром скорости полета, в направлении головной части.
11. Устройство по п. 9 или 10, в котором команда корректировки маршрута является командой, посылаемой устройством дистанционного управления, и в котором посредством устройства дистанционного управления формируют команду корректировки маршрута следующими способами, содержащими этапы, на которых:
обнаруживают операцию корректировки авиамаршрута, выполняемую оператором на устройстве дистанционного управления;
определяют, по меньшей мере, направление корректировки авиамаршрута или поле корректировки авиамаршрута, соответствующие операции корректировки авиамаршрута; и
формируют команду корректировки маршрута в соответствии, по меньшей мере, с направлением корректировки авиамаршрута или полем корректировки авиамаршрута.
12. Устройство по п. 11, в котором операция корректировки авиамаршрута содержит, по меньшей мере, одну из следующих операций:
операция скольжения оператором по движку на сенсорном экране устройства дистанционного управления;
операция щелчка оператором по физической кнопке направления устройства дистанционного управления;
операция движения оператором рокера управления устройства дистанционного управления; и
сенсорная операция оператора на кнопке направления на сенсорном экране устройства дистанционного управления.
13. Устройство по п. 11, в котором компонент корректировки направления содержит:
первый субкомпонент полета к контрольной точке, выполненный с возможностью управления UAV для полета к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута, когда во время полета UAV принимают команду корректировки маршрута;
первый субкомпонент получения координат контрольной точки, выполненный с возможностью получения координат контрольной точки;
субкомпонент определения координат целевой точки, выполненный с возможностью определения координат целевой точки в соответствии с углом направления и параметром дальности полета, причем угол направления определяется начальной позицией полета и координатами контрольной точки;
первый субкомпонент получения курсового угла в реальном времени, выполненный с возможностью получения курсового угла UAV в реальном времени;
первый субкомпонент вычисления отклонения авиамаршрута, выполненный с возможностью вычисления отклонения авиамаршрута в соответствии с углом направления и курсовым углом;
первый субкомпонент выравнивания по направлению, выполненный с возможностью управления UAV для его выравнивания с целевой точкой в соответствии с отклонением авиамаршрута; и
первый субкомпонент управления полетом, выполненный с возможностью вычисления расстояния между контрольной точкой и целевой точкой и управления UAV для полета к целевой точке.
14. Устройство по п. 11, в котором компонент корректировки направления содержит:
второй субкомпонент полета к контрольной точке, выполненный с возможностью управления UAV для полета к контрольной точке в соответствии с направлением корректировки авиамаршрута и полем корректировки авиамаршрута, когда во время полета UAV принимают команду корректировки маршрута;
второй субкомпонент получения координат контрольной точки, выполненный с возможностью получения координат контрольной точки;
второй субкомпонент получения курсового угла в реальном времени, выполненный с возможностью получения курсового угла UAV в реальном времени;
второй субкомпонент вычисления отклонения авиамаршрута, выполненный с возможностью вычисления отклонения авиамаршрута в соответствии с углом направления и курсовым углом, причем угол направления определяется начальной позицией полета и координатами контрольной точки;
второй субкомпонент выравнивания направления, выполненный с возможностью управления UAV для выравнивания с направлением, указанным углом направления, соответствующим отклонению авиамаршрута;
субкомпонент вычисления расстояния, выполненный с возможностью вычисления расстояния между начальной позицией полета и контрольной точкой; и
второй субкомпонент управления полетом, выполненный с возможностью управления полетом UAV в соответствии с остающимся расстоянием, причем остающееся расстояние определяется параметром дальности полета и расстоянием между начальной позицией полета и контрольной точкой.
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ СО ВСТРОЕННОЙ СИСТЕМОЙ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИЯХ | 2012 |
|
RU2597047C2 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2013 |
|
RU2537124C1 |
| 0 |
|
SU155323A1 | |
| CN 104670496 B, 17.08.2016 | |||
| CN 103149937 B, 21.10.2015. | |||

