Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств идентификации воздушных объектов.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ идентификации воздушных объектов (см., например, патент на изобретение №2568677 от 21 октября 2015 г.), основанный на отождествлении пространственных координат воздушных объектов, обнаруженных бортовой РЛС, с пространственными координатами абонентов системы обмена данными (СОД), передаваемыми по ее каналам.
К основным недостатком прототипа относится низкая достоверность идентификации воздушных объектов в условиях не поступления информации от отдельных абонентов СОД на момент идентификации. Это может быть вызвано, например, неработоспособностью отдельных терминалов СОД, сбоями в канале передачи данных и т.д.
Техническим результатом изобретения является повышение достоверности идентификации воздушных объектов в условиях не поступления информации от отдельных абонентов СОД на момент идентификации.
Указанный результат достигается тем, что в известном способе на борту каждого j-го абонента СОД в заданные моменты времени tij прогнозируют оставшуюся длительность полета Δtпол.ij j-го абонента СОД, где  , J - число взаимодействующих абонентов СОД,
, J - число взаимодействующих абонентов СОД,  Ij - число моментов времени tij в пределах длительности полета j-го абонента СОД, определяют совокупность прогнозных моментов времени {tmij}, на которые необходимо спрогнозировать пространственные координаты j-го абонента СОД в пределах оставшейся длительности его полета Δtпол.ij, где
Ij - число моментов времени tij в пределах длительности полета j-го абонента СОД, определяют совокупность прогнозных моментов времени {tmij}, на которые необходимо спрогнозировать пространственные координаты j-го абонента СОД в пределах оставшейся длительности его полета Δtпол.ij, где  Мij - число прогнозных моментов tmij - в пределах оставшейся длительности полета Δtпол.ij j-го абонента СОД, прогнозируют оценки xmij - пространственных координат j-го абонента СОД на прогнозные моменты времени tmij - в заданной прямоугольной системе координат OXYZ, передают с помощью терминала СОД через ненаправленную антенну информационную посылку Vij, содержащую номер j абонента СОД, совокупность спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД, совокупность прогнозных моментов времени {tmij}, на борту воздушного судна, являющегося носителем бортовой РЛС, принимают от взаимодействующих абонентов СОД совокупность информационных посылок {Vij}, записывают и хранят их, при этом каждую ij-ю информационную посылку Vij хранят до момента приема следующей информационной посылки от j-го абонента СОД или до наступления максимального прогнозного момента времени tMij, после обнаружения очередного n-го воздушного объекта выбирают из совокупности прогнозных моментов времени {tmij} момент времени tom.jn, ближайший к моменту времени tn обнаружения n-го воздушного объекта, выбирают из совокупности спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД оценки xjn, спрогнозированные на момент времени tom.jn, сравнивают модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок xjn каждого абонента СОД по всем координатным осям заданной прямоугольной системы координат OXYZ с заданным пороговым значением h, если модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок xjn любого из абонентов СОД по всем координатным осям заданной прямоугольной системы координат OXYZ не превышают заданного порогового значения h, то формируют решение о том, что n-й воздушный объект является абонентом СОД, в противном случае формируют решение о том, что n-й воздушный объект не является абонентом СОД.
Мij - число прогнозных моментов tmij - в пределах оставшейся длительности полета Δtпол.ij j-го абонента СОД, прогнозируют оценки xmij - пространственных координат j-го абонента СОД на прогнозные моменты времени tmij - в заданной прямоугольной системе координат OXYZ, передают с помощью терминала СОД через ненаправленную антенну информационную посылку Vij, содержащую номер j абонента СОД, совокупность спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД, совокупность прогнозных моментов времени {tmij}, на борту воздушного судна, являющегося носителем бортовой РЛС, принимают от взаимодействующих абонентов СОД совокупность информационных посылок {Vij}, записывают и хранят их, при этом каждую ij-ю информационную посылку Vij хранят до момента приема следующей информационной посылки от j-го абонента СОД или до наступления максимального прогнозного момента времени tMij, после обнаружения очередного n-го воздушного объекта выбирают из совокупности прогнозных моментов времени {tmij} момент времени tom.jn, ближайший к моменту времени tn обнаружения n-го воздушного объекта, выбирают из совокупности спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД оценки xjn, спрогнозированные на момент времени tom.jn, сравнивают модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок xjn каждого абонента СОД по всем координатным осям заданной прямоугольной системы координат OXYZ с заданным пороговым значением h, если модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок xjn любого из абонентов СОД по всем координатным осям заданной прямоугольной системы координат OXYZ не превышают заданного порогового значения h, то формируют решение о том, что n-й воздушный объект является абонентом СОД, в противном случае формируют решение о том, что n-й воздушный объект не является абонентом СОД.
Сущность изобретения заключается в том, что: на борту каждого из взаимодействующих абонентов СОД в заданные моменты времени на протяжении всего периода полета осуществляется прогнозирование собственных пространственных координат на определенные прогнозные моменты времени, и передается через ненаправленную антенну информационная посылка, содержащая номер абонента СОД, совокупность прогнозных моментов времени и спрогнозированные на данные моменты пространственные координаты абонента СОД; на борту носителя бортовой РЛС осуществляется прием данных информационных посылок от всех взаимодействующих абонентов СОД и после обнаружения очередного воздушного объекта из каждой информационной посылки выбираются ближайший к моменту его обнаружения прогнозный момент и спрогнозированные на данный момент оценки пространственных координат абонента СОД, которые используются в процессе отождествления с оценками пространственных координат обнаруженного воздушного объекта при формировании оценки его идентификационного признака. Это позволяет в определенных ситуациях воздушной обстановки правильно формировать оценки идентификационных признаков воздушных объектов, являющихся абонентами СОД, в условиях не поступления от них информации по каналу СОД на момент их идентификации, и как следствие, приводит к повышению достоверности идентификации воздушных объектов в целом.
Данный способ включает в себя следующие этапы:
1. На борту каждого j-го абонента СОД в заданные моменты времени tij выполнение процедур 1.1-1.4, где , J - число взаимодействующих абонентов СОД,  , Ij - число моментов времени tij в пределах длительности полета j-го абонента СОД (моменты времени tij следуют друг за другом через установленный интервал Δt1 на протяжении полета j-го абонента СОД):
, Ij - число моментов времени tij в пределах длительности полета j-го абонента СОД (моменты времени tij следуют друг за другом через установленный интервал Δt1 на протяжении полета j-го абонента СОД):
1.1. Прогнозирование оставшейся длительности полета Δtпол.ij j-го абонента СОД в соответствии с выражением
где Rпл.j - планируемое расстояние, которое необходимо преодолеть j-му абоненту СОД по траектории полета между точкой взлета и точкой посадки, t0j - момент взлета j-го абонента СОД, tij - момент времени осуществления прогноза, Vj (t) - скорость j-го абонента СОД в текущий момент времени t, Vij - скорость j-го абонента СОД в момент tij.
1.2. Определение совокупности прогнозных моментов времени {tmij}, на которые необходимо спрогнозировать пространственные координаты j-го абонента СОД в пределах оставшейся длительности его полета Δtпол.ij, в соответствии с выражением

где  ,
,  - число прогнозных моментов tmij в пределах оставшейся длительности полета Δtпол.j j-го абонента СОД, Δt - установленный интервал времени между двумя соседними прогнозными моментами tmij и t(m+1)ij (величина Δt едина для всех взаимодействующих абонентов СОД).
- число прогнозных моментов tmij в пределах оставшейся длительности полета Δtпол.j j-го абонента СОД, Δt - установленный интервал времени между двумя соседними прогнозными моментами tmij и t(m+1)ij (величина Δt едина для всех взаимодействующих абонентов СОД).
1.3. Прогнозирование оценок пространственных координат j-го абонента СОД на прогнозные моменты времени tmij в соответствии с выражением
где xmij, ymij, zmij - спрогнозированные оценки пространственных координат j-го абонента СОД в заданной прямоугольной системе координат OXYZ на прогнозный момент времени tmij (система координат OXYZ едина для всех взаимодействующих абонентов СОД), xij, уij, zij - оценки пространственных координат j-го абонента СОД в заданной прямоугольной системе координат OXYZ в момент времени tij, Vxij - скорость j-го абонента СОД в момент времени tij по оси ОХ заданной прямоугольной системы координат OXYZ, Vyij - скорость j-го абонента СОД в момент времени tij по оси OY заданной прямоугольной системы координат OXYZ, Vzij - скорость j-го абонента СОД в момент времени tij по оси OZ заданной прямоугольной системы координат OXYZ.
1.4. Передача с помощью терминала СОД через ненаправленную антенну информационной посылки  содержащей: j - номер абонента СОД,
содержащей: j - номер абонента СОД,  - совокупность спрогнозированных оценок пространственных координат j-го абонента СОД на прогнозные моменты времени {tmij}, {tmij} - совокупность прогнозных моментов времени, на которые осуществляется прогнозирование пространственных координат j-го абонента СОД в течение интервала Δtij.
- совокупность спрогнозированных оценок пространственных координат j-го абонента СОД на прогнозные моменты времени {tmij}, {tmij} - совокупность прогнозных моментов времени, на которые осуществляется прогнозирование пространственных координат j-го абонента СОД в течение интервала Δtij.
2. На борту воздушного судна, являющегося носителем бортовой РЛС:
2.1. Прием от взаимодействующих абонентов СОД совокупности информационных посылок {Vij}, запись и хранение их, при этом каждая ij-я информационная посылка Vij, принятая от j-го абонента СОД, хранится до момента приема следующей информационной посылки от данного абонента СОД или до наступления максимального прогнозного момента времени tMij из совокупности прогнозных моментов времени {tmij}.
2.2. Обнаружение очередного n-го воздушного объекта с помощью бортовой РЛС и формирование оценок  его пространственных координат в заданной прямоугольной системе координат OXYZ, где
его пространственных координат в заданной прямоугольной системе координат OXYZ, где  , N - число обнаруженных воздушных объектов.
, N - число обнаруженных воздушных объектов.
2.3. Выбор, из совокупности прогнозных моментов времени {tmij}, момента времени tom.jn, ближайшего к моменту времени tn обнаружения n-го воздушного объекта, в соответствии с выражением

2.4. Выбор, из совокупности спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД, оценок  спрогнозированных на момент времени tom.jn, в соответствии с выражением
спрогнозированных на момент времени tom.jn, в соответствии с выражением

2.5. Формирование оценки идентификационного признака обнаруженного воздушного объекта в соответствии с выражением
где  - оценка идентификационного признака n-го воздушного объекта, qn=1-n-й воздушный объект является абонентом СОД, qn=0-n-й воздушный объект не является абонентом СОД, величины qnjx, qnjy, qnjz определяются по формулам:
- оценка идентификационного признака n-го воздушного объекта, qn=1-n-й воздушный объект является абонентом СОД, qn=0-n-й воздушный объект не является абонентом СОД, величины qnjx, qnjy, qnjz определяются по формулам:



здесь h - заданное пороговое значение.
В соответствии с выражениями (6) - (9) решение о том, что n-й воздушный объект является абонентом СОД (qn=1), будет формироваться в том случае, если модули разностей оценок  пространственных координат данного воздушного объекта и выбранных спрогнозированных оценок
пространственных координат данного воздушного объекта и выбранных спрогнозированных оценок  любого из абонентов СОД по всем координатным осям заданной прямоугольной системы координат OXYZ не превышают заданного порогового значения h. В противном случае будет формироваться решение о том, что n-й воздушный объект не является абонентом СОД (qn=0).
любого из абонентов СОД по всем координатным осям заданной прямоугольной системы координат OXYZ не превышают заданного порогового значения h. В противном случае будет формироваться решение о том, что n-й воздушный объект не является абонентом СОД (qn=0).
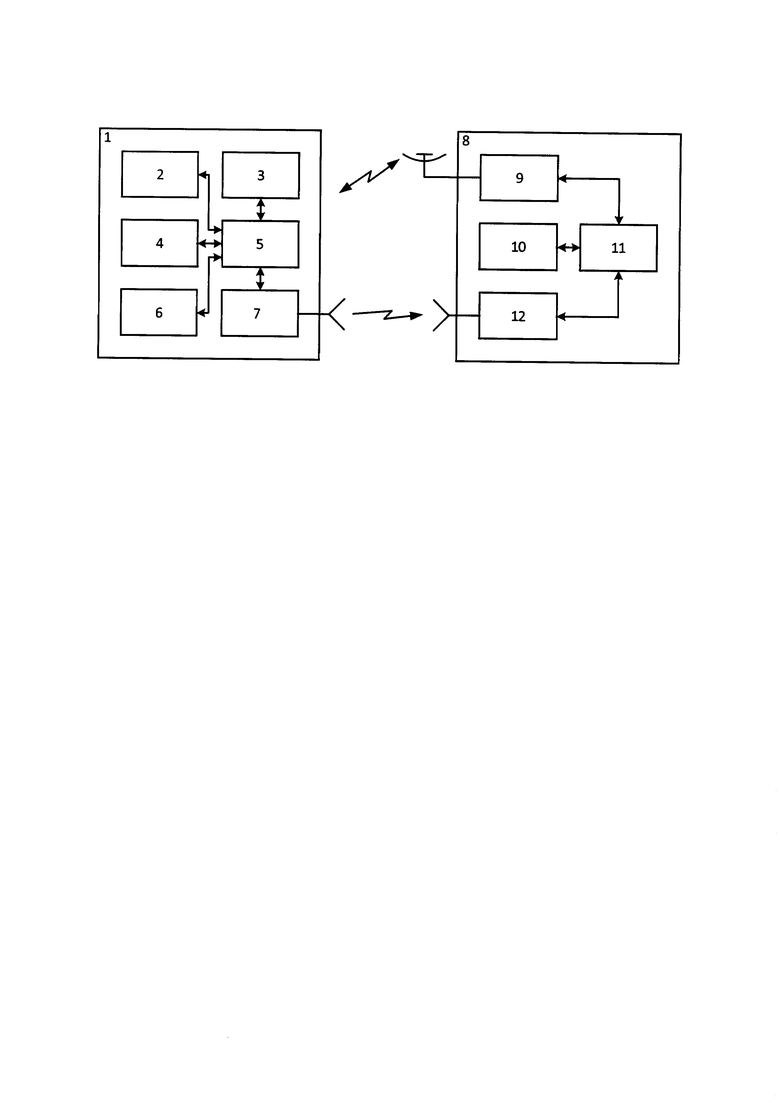
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на фигуре 1, где обозначено: 1 - n-й воздушный объект, являющийся j-м абонентом СОД; 2 - блок ввода исходной информации (БВИИ); 3 - блок прогнозирования (БП); 4 - навигационная система (НС); 5 - блок управления (БУ); 6 - датчик скоростей (ДС); 7 - терминал СОД; 8 - воздушное судно, являющееся носителем бортовой РЛС; 9 - бортовая РЛС; 10 - блок обработки и хранения информации (БОХИ); 11 - блок управления; 12 - терминал СОД.
БВИИ 2 предназначен для ввода исходной информации: j, Rпл.j, t0j, tij, Δt, t. БП 3 предназначен для формирования величин: Δtпол.ij, {tmij},  в соответствии с процедурами 1.1-1.3. НС 4 предназначена для формирования оценок
в соответствии с процедурами 1.1-1.3. НС 4 предназначена для формирования оценок  пространственных координат j-го абонента СОД в заданной прямоугольной системе координат OXYZ. БУ 5 предназначен для управления работой элементов комплекса на борту j-го абонента СОД 1. ДС 6 предназначен для формирования оценок скоростей j-го абонента СОД: Vj (t), Vij, Vxij, Vyij, Vzij. Терминал СОД 7 предназначен для передачи информационных посылок
пространственных координат j-го абонента СОД в заданной прямоугольной системе координат OXYZ. БУ 5 предназначен для управления работой элементов комплекса на борту j-го абонента СОД 1. ДС 6 предназначен для формирования оценок скоростей j-го абонента СОД: Vj (t), Vij, Vxij, Vyij, Vzij. Терминал СОД 7 предназначен для передачи информационных посылок  через ненаправленную антенну. Бортовая РЛС 9 предназначена для обнаружения очередного n-го воздушного объекта и формирования оценок
через ненаправленную антенну. Бортовая РЛС 9 предназначена для обнаружения очередного n-го воздушного объекта и формирования оценок  его пространственных координат в заданной прямоугольной системе координат OXYZ. БОХИ 10 предназначен для обработки информации и формирования величин: tom.jn,
его пространственных координат в заданной прямоугольной системе координат OXYZ. БОХИ 10 предназначен для обработки информации и формирования величин: tom.jn,  qn в соответствии с процедурами 2.3-2.5, а также для записи и хранения принятых информационных посылок
qn в соответствии с процедурами 2.3-2.5, а также для записи и хранения принятых информационных посылок  в соответствии с пунктом 2.1. БУ 11 - предназначен для управления работой элементов комплекса на борту носителя бортовой РЛС 8. Терминал СОД 12 предназначен для приема информационных посылок
в соответствии с пунктом 2.1. БУ 11 - предназначен для управления работой элементов комплекса на борту носителя бортовой РЛС 8. Терминал СОД 12 предназначен для приема информационных посылок  .
.
Комплекс работает следующим образом. БУ 5 управляет работой элементов комплекса на борту j-го абонента СОД 1. БУ 11 управляет работой элементов комплекса на борту носителя бортовой РЛС 8. С выхода БВИИ 2 через БУ 5 на вход БП 3 поступают величины: Rпл.j, t0j, tij, Δt, t, а на вход терминала СОД 7 - номер абонента СОД j. С выхода НС 4 через БУ 5 на вход БП 3 поступают оценки  пространственных координат j-го абонента СОД в заданной прямоугольной системе координат OXYZ. С выхода ДС 6 через БУ 5 на вход БП 3 поступают оценки скоростей j-го абонента СОД: Vj (t), Vij, Vxij, Vyij, Vzij. БП 3 формирует величины: Δtпол.ij, {tmij},
пространственных координат j-го абонента СОД в заданной прямоугольной системе координат OXYZ. С выхода ДС 6 через БУ 5 на вход БП 3 поступают оценки скоростей j-го абонента СОД: Vj (t), Vij, Vxij, Vyij, Vzij. БП 3 формирует величины: Δtпол.ij, {tmij},  в соответствии с процедурами 1.1 - 1.3. С выхода БП 3 через БУ 5 на вход терминала СОД 7 поступают величины: {tmij},
в соответствии с процедурами 1.1 - 1.3. С выхода БП 3 через БУ 5 на вход терминала СОД 7 поступают величины: {tmij},  . Терминал СОД 7 передает информационную посылку
. Терминал СОД 7 передает информационную посылку  через ненаправленную антенну. Терминал СОД 12 принимает информационную посылку . С выхода терминала СОД 12 информационная посылка
через ненаправленную антенну. Терминал СОД 12 принимает информационную посылку . С выхода терминала СОД 12 информационная посылка  через БУ 11 поступает на вход БОХИ 10. Бортовая РЛС 9 обнаруживает очередной n-й воздушный объект и формирует оценки
через БУ 11 поступает на вход БОХИ 10. Бортовая РЛС 9 обнаруживает очередной n-й воздушный объект и формирует оценки  его пространственных координат. С выхода бортовой РЛС 9 через БУ 11 оценки
его пространственных координат. С выхода бортовой РЛС 9 через БУ 11 оценки  поступают на вход БОХИ 10. БОХИ 10 записывает и хранит принятые информационные посылки
поступают на вход БОХИ 10. БОХИ 10 записывает и хранит принятые информационные посылки  в соответствии с пунктом 2.1., а также обрабатывает информацию и формирует величины: tom.jn,
в соответствии с пунктом 2.1., а также обрабатывает информацию и формирует величины: tom.jn,  и qn в соответствии с процедурами 2.3 - 2.5.
и qn в соответствии с процедурами 2.3 - 2.5.
Предлагаемое изобретение является новым, поскольку из общедоступных сведений не известен способ идентификации воздушных объектов сущность которого заключается в том, что: на борту каждого из взаимодействующих абонентов СОД в заданные моменты времени на протяжении всего периода полета осуществляется прогнозирование собственных пространственных координат на определенные прогнозные моменты времени, и передается через ненаправленную антенну информационная посылка, содержащая номер абонента СОД, совокупность прогнозных моментов времени и спрогнозированные на данные моменты пространственные координаты абонента СОД; на борту носителя бортовой РЛС осуществляется прием данных информационных посылок от всех взаимодействующих абонентов СОД и после обнаружения очередного воздушного объекта из каждой информационной посылки выбираются ближайший к моменту его обнаружения прогнозный момент и спрогнозированные на данный момент оценки пространственных координат абонента СОД, которые используются в процессе отождествления с оценками пространственных координат обнаруженного воздушного объекта при формировании оценки его идентификационного признака.
Предлагаемое изобретение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что если: на борту каждого из взаимодействующих абонентов СОД в заданные моменты времени на протяжении всего периода полета осуществлять прогнозирование собственных пространственных координат на определенные прогнозные моменты времени, и передавать через ненаправленную антенну информационную посылку, содержащую номер абонента СОД, совокупность прогнозных моментов времени и спрогнозированные на данные моменты пространственные координаты абонента СОД; на борту носителя бортовой РЛС осуществлять прием данных информационных посылок от всех взаимодействующих абонентов СОД и после обнаружения очередного воздушного объекта из каждой информационной посылки выбирать ближайший к моменту его обнаружения прогнозный момент и спрогнозированные на данный момент оценки пространственных координат абонента СОД использовать в процессе отождествления с оценками пространственных координат обнаруженного воздушного объекта при формировании оценки его идентификационного признака, то это приведет к повышению достоверности идентификации воздушных объектов в условиях не поступления информации от отдельных абонентов СОД на момент идентификации.
Предлагаемое изобретение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
Изобретение относится к области радиотехники и предназначено для использования средств идентификации воздушных целей, обнаруживаемых бортовой РЛС. Технический результат заключается в повышении достоверности идентификации воздушных объектов в условиях непоступления информации от отдельных абонентов СОД на момент идентификации. На борту каждого из взаимодействующих абонентов СОД в заданные моменты времени на протяжении всего периода полета осуществляется прогнозирование собственных пространственных координат, и передается информационная посылка, содержащая номер абонента СОД, совокупность прогнозных моментов времени и спрогнозированные на данные моменты пространственные координаты абонента СОД, на борту носителя бортовой РЛС осуществляется прием данных информационных посылок от всех взаимодействующих абонентов СОД, и после обнаружения очередного воздушного объекта из каждой информационной посылки выбираются ближайший к моменту его обнаружения прогнозный момент и спрогнозированные на данный момент оценки пространственных координат абонента СОД, которые используются в процессе отождествления с оценками пространственных координат обнаруженного воздушного объекта при формировании оценки его идентификационного признака. 1 ил.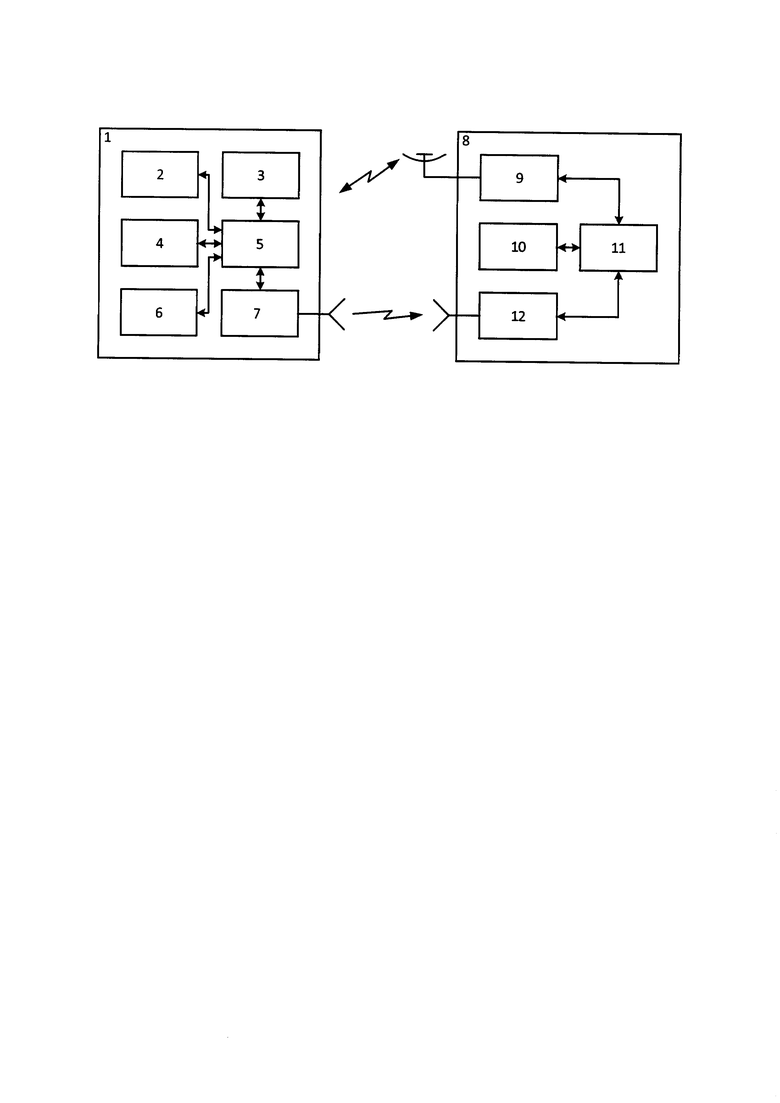
Способ навигационно-связной идентификации воздушных объектов, основанный на отождествлении пространственных координат воздушных объектов, обнаруженных бортовой РЛС, с пространственными координатами абонентов системы обмена данными (СОД), передаваемыми по ее каналам, отличающийся тем, что на борту каждого j-го абонента СОД в заданные моменты времени tij прогнозируют оставшуюся длительность полета Δtпол.ij j-го абонента СОД, где  , J - число взаимодействующих абонентов СОД,
, J - число взаимодействующих абонентов СОД,  , Ij - число моментов времени tij в пределах длительности полета j-го абонента СОД, определяют совокупность прогнозных моментов времени {tmij}, на которые необходимо спрогнозировать пространственные координаты j-го абонента СОД в пределах оставшейся длительности его полета Δtпол.ij, где
, Ij - число моментов времени tij в пределах длительности полета j-го абонента СОД, определяют совокупность прогнозных моментов времени {tmij}, на которые необходимо спрогнозировать пространственные координаты j-го абонента СОД в пределах оставшейся длительности его полета Δtпол.ij, где  , Mij - число прогнозных моментов tmij в пределах оставшейся длительности полета Δtпол.ij j-го абонента СОД, прогнозируют оценки xmij пространственных координат j-го абонента СОД на прогнозные моменты времени tmij в заданной прямоугольной системе координат OXYZ, передают с помощью терминала СОД через ненаправленную антенну информационную посылку Vij, содержащую номер j абонента СОД, совокупность спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД, совокупность прогнозных моментов времени {tmij}, на борту воздушного судна, являющегося носителем бортовой РЛС, принимают от взаимодействующих абонентов СОД совокупность информационных посылок {Vij}, записывают и хранят их, при этом каждую ij-ю информационную посылку Vij хранят до момента приема следующей информационной посылки от j-го абонента СОД или до наступления максимального прогнозного момента времени tMij, после обнаружения очередного n-го воздушного объекта выбирают из совокупности прогнозных моментов времени {tmij} момент времени tom.jn, ближайший к моменту времени tn обнаружения n-го воздушного объекта, выбирают из совокупности спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД оценки xjn, спрогнозированные на момент времени tom.jn, сравнивают модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок хjn каждого абонента СОД по всем координатным осям заданной прямоугольной системы координат OXYZ с заданным пороговым значением h, если модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок xjn любого из абонентов СОД по всем координатным осям заданной прямоугольной системы координат OXYZ не превышают заданного порогового значения h, то формируют решение о том, что n-й воздушный объект является абонентом СОД, в противном случае формируют решение о том, что n-й воздушный объект не является абонентом СОД.
, Mij - число прогнозных моментов tmij в пределах оставшейся длительности полета Δtпол.ij j-го абонента СОД, прогнозируют оценки xmij пространственных координат j-го абонента СОД на прогнозные моменты времени tmij в заданной прямоугольной системе координат OXYZ, передают с помощью терминала СОД через ненаправленную антенну информационную посылку Vij, содержащую номер j абонента СОД, совокупность спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД, совокупность прогнозных моментов времени {tmij}, на борту воздушного судна, являющегося носителем бортовой РЛС, принимают от взаимодействующих абонентов СОД совокупность информационных посылок {Vij}, записывают и хранят их, при этом каждую ij-ю информационную посылку Vij хранят до момента приема следующей информационной посылки от j-го абонента СОД или до наступления максимального прогнозного момента времени tMij, после обнаружения очередного n-го воздушного объекта выбирают из совокупности прогнозных моментов времени {tmij} момент времени tom.jn, ближайший к моменту времени tn обнаружения n-го воздушного объекта, выбирают из совокупности спрогнозированных оценок {xmij} пространственных координат j-го абонента СОД оценки xjn, спрогнозированные на момент времени tom.jn, сравнивают модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок хjn каждого абонента СОД по всем координатным осям заданной прямоугольной системы координат OXYZ с заданным пороговым значением h, если модули разностей оценок хn пространственных координат обнаруженного n-го воздушного объекта и выбранных спрогнозированных оценок xjn любого из абонентов СОД по всем координатным осям заданной прямоугольной системы координат OXYZ не превышают заданного порогового значения h, то формируют решение о том, что n-й воздушный объект является абонентом СОД, в противном случае формируют решение о том, что n-й воздушный объект не является абонентом СОД.
| СПОСОБ КОМПЛЕКСНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, ОБНАРУЖИВАЕМЫХ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2016 |
|
RU2692470C2 |
| СПОСОБ КООРДИНАТНО-СВЯЗНОГО ОПОЗНАВАНИЯ С ПРИМЕНЕНИЕМ СТАТИСТИЧЕСКОЙ ОЦЕНКИ РАЗНОСТИ ПРОСТРАНСТВЕННЫХ КООРДИНАТ | 2011 |
|
RU2461019C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2568677C1 |
| МЕТОДИКА АНАЛИТИЧЕСКОЙ ОЦЕНКИ ДОСТОВЕРНОСТИ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ЦЕЛЕЙ НА ОСНОВЕ АЛГОРИТМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ, Научно-технический журнал, Теория и техника радиосвязи, г | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| US 7692573 B1, | |||

