Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных объектов.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.), основанный на попарном отождествлении пространственных координат воздушных объектов, обнаруженных бортовой радиолокационной станцией (РЛС), с пространственными координатами своих воздушных объектов (абонентов системы обмена данными), передаваемыми по каналам системы обмена данными (СОД), примером которой может служить многофункциональная интегрированная система связи, навигации и опознавания (см., например, Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2006. С. 647).
Основным недостатком прототипа является низкая вероятность правильной идентификации воздушных объектов в режиме обзора пространства бортовой РЛС, при наличии единичных измерений от бортовой РЛС и СОД в условиях многоцелевой обстановки. Одной из причин этого является возникновение ошибок идентификации при отождествлении пространственных координат одного и того же абонента СОД с пространственными координатами нескольких воздушных объектов, обнаруженных бортовой РЛС, в условиях многоцелевой обстановки.
Техническим результатом изобретения является повышение вероятности правильной идентификации воздушных объектов, обнаруженных бортовой РЛС, в условиях многоцелевой обстановки за счет учета влияния пространственного положения данных воздушных объектов на оценки их идентификационных признаков, сформированных по результатам попарного отождествления (текущие оценки идентификационных признаков) путем комплексной обработки информации от бортовой РЛС и СОД по окончании цикла обзора пространства.
Указанный результат достигается тем, что в известном способе координатно-связного опознавания по окончании цикла обзора пространства бортовой РЛС определяют число абонентов СОД, пространственные координаты которых отождествлены с пространственными координатами воздушных объектов, определяют число воздушных объектов, пространственные координаты которых отождествлены с пространственными координатами абонентов СОД, определяют число возможных комбинаций истинных значений идентификационных признаков воздушных объектов, экстраполируют оценки пространственных координат i-х воздушных объектов и соответствующие дисперсии на моменты времени измерения пространственных координат j≠i-х воздушных объектов, где 

Сущность изобретения заключается в применении комплексной обработки информации от бортовой РЛС и СОД по окончании цикла обзора пространства бортовой РЛС, в основе которой лежит процедура определения числа возможных комбинаций истинных значений идентификационных признаков воздушных объектов, обнаруженных бортовой РЛС, с последующим формированием вектора уточненных оценок их идентификационных признаков по критерию максимума функции правдоподобия из всех возможных комбинаций идентификационных признаков данных воздушных объектов. Это позволяет исправлять ошибки идентификации, возникающие при отождествлении пространственных координат одного и того же абонента СОД с пространственными координатами нескольких воздушных объектов, обнаруженных бортовой РЛС, за счет учета влияния пространственного положения воздушных объектов на текущие оценки их идентификационных признаков.
Данный способ включает в себя следующие этапы:
1. В течение цикла обзора пространства бортовой РЛС:
- обнаружение бортовой РЛС воздушных объектов, формирование оценок их пространственных координат 

- ввод оценок пространственных координат воздушных объектов, обнаруженных бортовой РЛС

- запись и хранение оценок пространственных координат воздушных объектов, обнаруженных бортовой РЛС
- ввод от СОД оценок пространственных координат абонентов СОД 


- запись и хранение оценок пространственных координат абонентов СОД 

- ввод из постоянного запоминающего устройства (ПЗУ) значений ширины спектра флуктуации воздушных объектов α и дисперсий их ускорения 
- формирование результатов попарного отождествления пространственных координат воздушных объектов, обнаруженных бортовой РЛС, с пространственными координатами абонентов СОД 




2. По окончании цикла обзора пространства бортовой РЛС:
- определение числа абонентов СОД, пространственные координаты которых отождествлены с пространственными координатами воздушных объектов Noa в соответствии с выражением:

где  ;
;
- определение числа воздушных объектов, пространственные координаты которых отождествлены с пространственными координатами абонентов СОД Nоц в соответствии с выражением:

- определение числа возможных комбинаций истинных значений идентификационных признаков воздушных объектов, обнаруженных бортовой РЛС, Nq в соответствии с выражением
- формирование экстраполированных оценок пространственных координат i-х воздушных объектов и соответствующих дисперсий на моменты времени измерения пространственных координат j≠i-х воздушных объектов в соответствии с выражениями:

где 

- расчет вероятностей формирования текущих оценок идентификационных признаков воздушных объектов для каждой возможной комбинации их истинных значений в соответствии с выражениями:
 и
и


где  ;
;
- расчет значений функций правдоподобия каждой возможной комбинации истинных значений идентификационных признаков воздушных объектов по отношению к их текущим оценкам  в соответствии с выражением:
в соответствии с выражением:

- формирование вектора уточненных оценок идентификационных признаков воздушных объектов q* по критерию максимума функции правдоподобия из всех возможных комбинаций их истинных значений в соответствии с выражением:

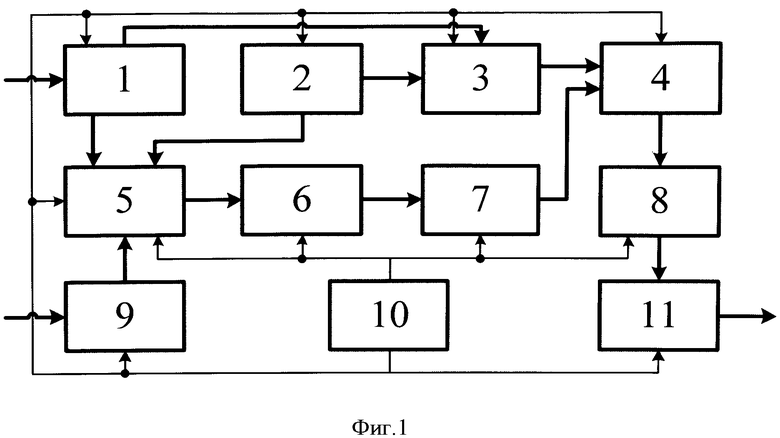
Данный способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фигуре 1, где обозначено: 1 - оперативное запоминающее устройство (ОЗУ), 2 - постоянное запоминающее устройство (ПЗУ); 3 - экстраполятор; 4 - блок расчета вероятностей; 5 - блок попарного отождествления; 6 - ОЗУ; 7 - блок анализа результатов попарного отождествления; 8 - блок расчета функций правдоподобия; 9 - ОЗУ; 10 - синхронизатор; 11 - блок уточнения оценок.
ОЗУ 1 предназначено для записи и хранения данных, поступающих от бортовой РЛС:


 и
и  в соответствии с выражениями (6) и (7). Блок попарного отождествления 5 предназначен для формирования результатов попарного отождествления пространственных координат воздушных объектов, обнаруженных бортовой РЛС, с пространственными координатами абонентов СОД
в соответствии с выражениями (6) и (7). Блок попарного отождествления 5 предназначен для формирования результатов попарного отождествления пространственных координат воздушных объектов, обнаруженных бортовой РЛС, с пространственными координатами абонентов СОД 



 в соответствии с выражением (8). ОЗУ 9 предназначено для записи и хранения данных, поступающих от СОД:
в соответствии с выражением (8). ОЗУ 9 предназначено для записи и хранения данных, поступающих от СОД: 

Устройство работает следующим образом. Синхронизатор 10 синхронизирует работу элементов устройства. В течение цикла обзора пространства на вход ОЗУ 1 от бортовой РЛС поступают оценки пространственных координат воздушных объектов, обнаруженных бортовой РЛС








 и
и  в соответствии с выражениями (6) и (7). С выхода блока расчета вероятностей 4 на вход блока расчета функций правдоподобия 8 поступают вероятности формирования текущих оценок идентификационных признаков воздушных объектов для каждой возможной комбинации их истинных значений
в соответствии с выражениями (6) и (7). С выхода блока расчета вероятностей 4 на вход блока расчета функций правдоподобия 8 поступают вероятности формирования текущих оценок идентификационных признаков воздушных объектов для каждой возможной комбинации их истинных значений  и
и  .
.
Блок расчета функций правдоподобия 8 рассчитывает значения функций правдоподобия каждой возможной комбинации истинных значений идентификационных признаков воздушных объектов по отношению к их текущим оценкам  в соответствии с выражением (8). С выхода блока расчета функций правдоподобия 8 на вход блока уточнения оценок 11 поступают значения функций правдоподобия каждой возможной комбинации истинных значений идентификационных признаков воздушных объектов по отношению к их текущим оценкам
в соответствии с выражением (8). С выхода блока расчета функций правдоподобия 8 на вход блока уточнения оценок 11 поступают значения функций правдоподобия каждой возможной комбинации истинных значений идентификационных признаков воздушных объектов по отношению к их текущим оценкам  .
.
Блок уточнения оценок формирует вектор уточненных оценок идентификационных признаков воздушных объектов q* по критерию максимума функции правдоподобия из всех возможных комбинаций их истинных значений в соответствии с выражением (9).
Для определения эффективности предлагаемого способа оценивались следующие показатели:
- вероятность правильной идентификации воздушных объектов в подсистеме координатно-связной идентификации, функционирующей в соответствии с предлагаемым способом, Pкси;
- вероятность правильной идентификации воздушных объектов в подсистеме координатно-связной идентификации, функционирующей в соответствии с известным способом координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.) Pкси1.
Показатели Pкси, Pкси1 оценивались путем проведения статистических испытаний на соответствующих имитационных моделях подсистемы координатно-связной идентификации при одинаковых начальных условиях.
Для характеристики эффективности предлагаемого способа определялся прирост вероятности правильной идентификации воздушных объектов в подсистеме координатно-связной идентификации за счет применения предлагаемого способа по отношению к данному показателю с применением известного способа ΔP=Pкси-Pкси1.
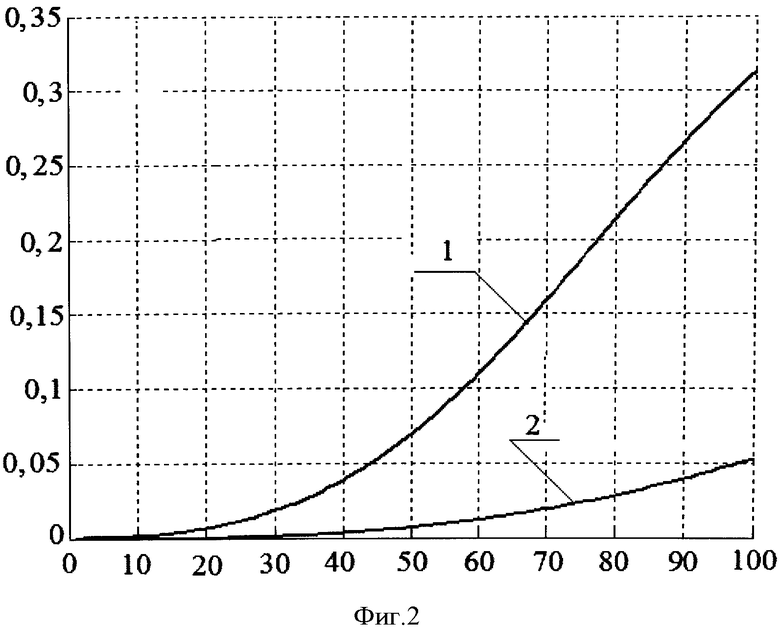
На фигуре 2 приведены графики зависимости величины ΔP от дальности до воздушного объекта Дц (км), обнаруженного бортовой РЛС, для различных значений пространственных плотностей воздушных объектов ρ. При этом график 1 соответствует значению пространственной плотности воздушных объектов  , а график 2 - значению
, а график 2 - значению  .
.
Из анализа графиков, приведенных на фигуре 2, видно, что применение предлагаемого способа приводит к существенному повышению вероятности правильной идентификации воздушных объектов в условиях многоцелевой обстановки. При этом наибольший положительный эффект достигается при более высоких пространственных плотностях воздушных объектов. Так, например, для  на дальности до воздушного объекта, обнаруженного бортовой РЛС, равной Дц=100 км, прирост вероятности правильной идентификации составляет ΔP≈0,05, в то время как для
на дальности до воздушного объекта, обнаруженного бортовой РЛС, равной Дц=100 км, прирост вероятности правильной идентификации составляет ΔP≈0,05, в то время как для  , при прочих равных условиях прирост вероятности правильной идентификации составляет ΔP≈0,32.
, при прочих равных условиях прирост вероятности правильной идентификации составляет ΔP≈0,32.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ идентификации воздушных объектов на основе комплексной обработки информации от бортовой РЛС и СОД.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что применение комплексной обработки информации от бортовой РЛС и СОД увеличивает вероятность правильной идентификации воздушных объектов.
Предлагаемое изобретение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2740385C1 |
| СПОСОБ КОМПЛЕКСНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, ОБНАРУЖИВАЕМЫХ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2016 |
|
RU2692470C2 |
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2020 |
|
RU2744335C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2792021C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2024 |
|
RU2831760C1 |
| СПОСОБ ДВУХПОЗИЦИОННОЙ ИДЕНТИФИКАЦИИ НАЗЕМНОЙ ЦЕЛИ | 2022 |
|
RU2797996C1 |
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных объектов. Достигаемый технический результат - повышение вероятности правильной идентификации воздушных объектов, обнаруженных бортовой радиолокационной станцией (БРЛС), в условиях многоцелевой обстановки. Сущность изобретения заключается в применении комплексной обработки информации от БРЛС и системы обмена данными (СОД) по окончании цикла обзора пространства БРЛС, в основе которой лежит процедура определения числа возможных комбинаций истинных значений идентификационных признаков воздушных объектов, обнаруженных БРЛС, с последующим формированием вектора уточненных оценок их идентификационных признаков по критерию максимума функции правдоподобия из всех возможных комбинаций идентификационных признаков данных воздушных объектов, что позволяет исправлять ошибки идентификации, возникающие при отождествлении пространственных координат одного и того же абонента СОД с пространственными координатами нескольких воздушных объектов, обнаруженных БРЛС, за счет учета влияния пространственного положения воздушных объектов на текущие оценки их идентификационных признаков. 2 ил.
Способ идентификации воздушных объектов, основанный на их обнаружении бортовой радиолокационной станцией (РЛС), формировании оценок их пространственных координат и соответствующих дисперсий, вводе, записи и хранении оценок пространственных координат воздушных объектов, обнаруженных бортовой РЛС, соответствующих дисперсий и моментов времени их формирования, вводе, записи и хранении от системы обмена данными (СОД) оценок пространственных координат абонентов системы обмена данными, соответствующих дисперсий и моментов времени их формирования, вводе из постоянного запоминающего устройства значений ширины спектра флуктуации воздушных объектов и дисперсий их ускорения, формировании результатов попарного отождествления пространственных координат воздушных объектов, обнаруженных бортовой РЛС, с пространственными координатами абонентов системы обмена данными, формировании текущих оценок идентификационных признаков воздушных объектов, обнаруженных бортовой РЛС, отличающийся тем, что по окончании цикла обзора пространства бортовой РЛС определяют число абонентов СОД, пространственные координаты которых отождествлены с пространственными координатами воздушных объектов, определяют число воздушных объектов, пространственные координаты которых отождествлены с пространственными координатами абонентов СОД, определяют число возможных комбинаций истинных значений идентификационных признаков воздушных объектов, экстраполируют оценки пространственных координат i-х воздушных объектов и соответствующих дисперсий на моменты времени измерения пространственных координат j≠i-х воздушных объектов, где  ,
,  , I - число воздушных объектов, обнаруженных бортовой РЛС, рассчитывают вероятности формирования текущих оценок идентификационных признаков воздушных объектов для каждой возможной комбинации их истинных значений, рассчитывают значения функций правдоподобия каждой возможной комбинации истинных значений идентификационных признаков воздушных объектов по отношению к их текущим оценкам, уточняют оценки идентификационных признаков воздушных объектов по критерию максимума функции правдоподобия из всех возможных комбинаций их истинных значений.
, I - число воздушных объектов, обнаруженных бортовой РЛС, рассчитывают вероятности формирования текущих оценок идентификационных признаков воздушных объектов для каждой возможной комбинации их истинных значений, рассчитывают значения функций правдоподобия каждой возможной комбинации истинных значений идентификационных признаков воздушных объектов по отношению к их текущим оценкам, уточняют оценки идентификационных признаков воздушных объектов по критерию максимума функции правдоподобия из всех возможных комбинаций их истинных значений.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Под ред | |||
| КАНАЩЕНКОВА А.И | |||
| и др., Москва, "Радиотехника", 2006, с.647 | |||
| Паровой трубчатый подогреватель вибрационного типа | 1959 |
|
SU130410A1 |
| СПОСОБ РАДИОКОНТРОЛЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444753C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| Устройство для набора и взвешивания шихты вагон-весами доменной печи | 1951 |
|
SU95861A1 |
| US 5483241 A, 09.01.1996 | |||
| JP 4279147 B2,, 17.06.2009 | |||
| EP 689150 B1, 29.03.2000 | |||
| WO 2010008692 A1, 21.01.2010. | |||

