Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств идентификации воздушных целей.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ координатно-связного опознавания с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.), основанный на попарном отождествлении пространственных координат обнаруженных бортовой радиолокационной станцией (РЛС) воздушных объектов (целей) с пространственными координатами своих воздушных объектов (абонентов системы обмена данными), передаваемыми по каналам системы обмена данными (СОД), примером которой может служить многофункциональная интегрированная система связи, навигации и опознавания (см., например Радиолокационные системы многофункциональных самолетов. Т. 1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. С. 647).
Одним из недостатков прототипа применительно к идентификации воздушных целей, является существенное снижение достоверности их идентификации в условиях воздействия дестабилизирующих факторов, которые могут в отдельных случаях приводить к значительному отклонению сформированных с помощью РЛС оценок координат обнаруженных целей от аналогичных оценок их координат, полученных по каналу СОД (под идентификацией воздушной цели в данном случае понимается задача определения одного из двух ее идентификационных признаков: «цель является абонентом СОД» или «цель не является абонентом СОД»). Примером указанных дестабилизирующих факторов могут быть различного рода помехи.
Техническим результатом изобретения является повышение достоверности идентификации воздушных целей.
Указанный результат достигается тем, что в известном способе определяют для каждых k и i частный критериальный параметр  в виде квадрата статистической оценки разности пространственных координат очередных воздушной цели и абонента СОД, где
в виде квадрата статистической оценки разности пространственных координат очередных воздушной цели и абонента СОД, где  , I - число тактов отождествления координат воздушной цели и абонента СОД в пределах периода идентификации,
, I - число тактов отождествления координат воздушной цели и абонента СОД в пределах периода идентификации,  - номер координатной оси заданной прямоугольной системы координат OXYZ, k=1 соответствует оси ОХ, k=2 соответствует оси OY, k=3 соответствует оси OZ, определяют для каждых k и i порог
- номер координатной оси заданной прямоугольной системы координат OXYZ, k=1 соответствует оси ОХ, k=2 соответствует оси OY, k=3 соответствует оси OZ, определяют для каждых k и i порог  для частного критериального параметра
для частного критериального параметра  с учетом заданной допустимой вероятности ошибочных частных решений «цель не является абонентом СОД» в условиях отсутствия дестабилизирующих факторов, формируют для каждых k и i частное решение qki об идентификационном признаке воздушной цели путем сравнения частного критериального параметра с соответствующим порогом hki, при этом, если частный критериальный параметр превышает порог hki, то формируют частное решение qki=0 «цель не является абонентом СОД», в противном случае формируют частное решение qki=1 «цель является абонентом СОД», формируют общий критериальный параметр Sq в виде относительной частоты частных решений «цель не является абонентом СОД» за период идентификации, задают с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей порог hq в виде допустимой относительной частоты ошибочных частных решений «цель не является абонентом СОД» за период идентификации, формируют итоговое решение q об идентификационном признаке воздушной цели путем сравнения общего критериального параметра Sq с заданным порогом hq, при этом, если общий критериальный параметр S превышает порог hq, то формируют итоговое решение q=0 «цель не является абонентом СОД», в противном случае формируют итоговое решение q=1 «цель является абонентом СОД».
с учетом заданной допустимой вероятности ошибочных частных решений «цель не является абонентом СОД» в условиях отсутствия дестабилизирующих факторов, формируют для каждых k и i частное решение qki об идентификационном признаке воздушной цели путем сравнения частного критериального параметра с соответствующим порогом hki, при этом, если частный критериальный параметр превышает порог hki, то формируют частное решение qki=0 «цель не является абонентом СОД», в противном случае формируют частное решение qki=1 «цель является абонентом СОД», формируют общий критериальный параметр Sq в виде относительной частоты частных решений «цель не является абонентом СОД» за период идентификации, задают с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей порог hq в виде допустимой относительной частоты ошибочных частных решений «цель не является абонентом СОД» за период идентификации, формируют итоговое решение q об идентификационном признаке воздушной цели путем сравнения общего критериального параметра Sq с заданным порогом hq, при этом, если общий критериальный параметр S превышает порог hq, то формируют итоговое решение q=0 «цель не является абонентом СОД», в противном случае формируют итоговое решение q=1 «цель является абонентом СОД».
Сущность изобретения заключается в том, что итоговое решение об идентификационном признаке каждой обнаруженной воздушной цели формируется на основе сравнения общего критериального параметра с соответствующим порогом, которые представляют собой относительную частоту частных решений «цель не является абонентом СОД» за период идентификации и ее допустимое значение соответственно, при этом, порог для общего критериального параметра задается с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей. Это позволяет уменьшить отрицательное влияние случаев значительного отклонения сформированных с помощью РЛС оценок координат обнаруженных целей от аналогичных оценок их координат, полученных по каналу СОД и, как следствие, приводит к повышению достоверности идентификации воздушных целей в целом в условиях воздействия дестабилизирующих факторов.
Данный способ включает в себя следующие этапы в течение заданного периода идентификации ТИ:
1. Обнаружение с помощью РЛС очередной воздушной цели и формирование оценок  ее пространственных координат в заданной прямоугольной системе координат OXYZ и соответствующих дисперсий
ее пространственных координат в заданной прямоугольной системе координат OXYZ и соответствующих дисперсий  для каждых k и i, где
для каждых k и i, где  , I - число тактов отождествления координат воздушной цели и абонента СОД в пределах периода идентификации ТИ,
, I - число тактов отождествления координат воздушной цели и абонента СОД в пределах периода идентификации ТИ,  - номер координатной оси заданной прямоугольной системы координат OXYZ: k=1 соответствует оси ОХ, k=2 соответствует оси OY, k=3 соответствует оси OZ;
- номер координатной оси заданной прямоугольной системы координат OXYZ: k=1 соответствует оси ОХ, k=2 соответствует оси OY, k=3 соответствует оси OZ;
2. Прием информационного сообщения, переданного с очередного абонента СОД, и выделение из него оценок  пространственных координат данного абонента СОД в заданной прямоугольной системе координат OXYZ и соответствующих дисперсий
пространственных координат данного абонента СОД в заданной прямоугольной системе координат OXYZ и соответствующих дисперсий  для каждых k и i;
для каждых k и i;
3. Определение параметра отождествления rki в виде оценки разности пространственных координат очередной воздушной цели и очередного абонента СОД, для каждых k и i в соответствии с выражением:

4. Определение дисперсии Drki параметра отождествления rki для каждых k и i в соответствии с выражением

5. Определение частного критериального параметра  в виде квадрата статистической оценки разности пространственных координат очередной воздушной цели и очередного абонента СОД, для каждых k и i в соответствии с выражением
в виде квадрата статистической оценки разности пространственных координат очередной воздушной цели и очередного абонента СОД, для каждых k и i в соответствии с выражением

где  ;
;
6. Определение порога hki для частного критериального параметра  для каждых k и i в соответствии с выражением
для каждых k и i в соответствии с выражением

где  - заданный коэффициент пропорциональности. Данный коэффициент задается с учетом заданной допустимой вероятности ошибочных (ложных) частных решений «цель не является абонентом СОД» в условиях отсутствия дестабилизирующих факторов. При этом увеличение параметра χ в пределах от 0 до +∞ соответствует уменьшению допустимой вероятности ошибочных частных решений «цель не является абонентом СОД» в пределах от 1 до 0. С одной стороны, увеличение параметра χ приводит к уменьшению вероятности ошибочных частных решений «цель не является абонентом СОД», а с другой стороны приводит к увеличению ошибочных частных решений «цель является абонентом СОД». В связи с этим на практике значение параметра χ целесообразно задавать в ограниченных пределах, например, в пределах от 4 до 9, что соответствует изменению вероятности ошибочных частных решений «цель не является абонентом СОД» в пределах от 0,0228 до 0,0014.
- заданный коэффициент пропорциональности. Данный коэффициент задается с учетом заданной допустимой вероятности ошибочных (ложных) частных решений «цель не является абонентом СОД» в условиях отсутствия дестабилизирующих факторов. При этом увеличение параметра χ в пределах от 0 до +∞ соответствует уменьшению допустимой вероятности ошибочных частных решений «цель не является абонентом СОД» в пределах от 1 до 0. С одной стороны, увеличение параметра χ приводит к уменьшению вероятности ошибочных частных решений «цель не является абонентом СОД», а с другой стороны приводит к увеличению ошибочных частных решений «цель является абонентом СОД». В связи с этим на практике значение параметра χ целесообразно задавать в ограниченных пределах, например, в пределах от 4 до 9, что соответствует изменению вероятности ошибочных частных решений «цель не является абонентом СОД» в пределах от 0,0228 до 0,0014.
7. Формирование частного решения qki об идентификационном признаке воздушной цели для каждых k и i в соответствии с выражением

где qki=0 - частное решение об идентификационном признаке воздушной цели «цель не является абонентом СОД»; qki=1 - частное решение об идентификационном признаке воздушной цели «цель является абонентом СОД».
8. Формирование общего критериального параметра Sq в виде относительной частоты частных решений «цель не является абонентом СОД» за период идентификации в соответствии с выражением

9. Формирование итогового решения q об идентификационном признаке воздушной цели в соответствии с выражением

где q=0 - итоговое решение об идентификационном признаке воздушной цели «цель не является абонентом СОД»; q=1 - итоговое решение об идентификационном признаке воздушной цели «цель является абонентом СОД»;  - порог для общего критериального параметра, представляющий собой допустимую относительную частоту ошибочных частных решений «цель не является абонентом СОД» за период идентификации. Порог hq задается с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей. По мере увеличения уровня воздействия дестабилизирующих факторов на значения оценок пространственных координат целей и абонентов СОД, необходимо увеличивать порог hq в пределах от 0 до 1. При отсутствии информации о дестабилизирующих факторах в районе идентификации воздушных целей значение порога целесообразно задавать равным 0,5.
- порог для общего критериального параметра, представляющий собой допустимую относительную частоту ошибочных частных решений «цель не является абонентом СОД» за период идентификации. Порог hq задается с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей. По мере увеличения уровня воздействия дестабилизирующих факторов на значения оценок пространственных координат целей и абонентов СОД, необходимо увеличивать порог hq в пределах от 0 до 1. При отсутствии информации о дестабилизирующих факторах в районе идентификации воздушных целей значение порога целесообразно задавать равным 0,5.
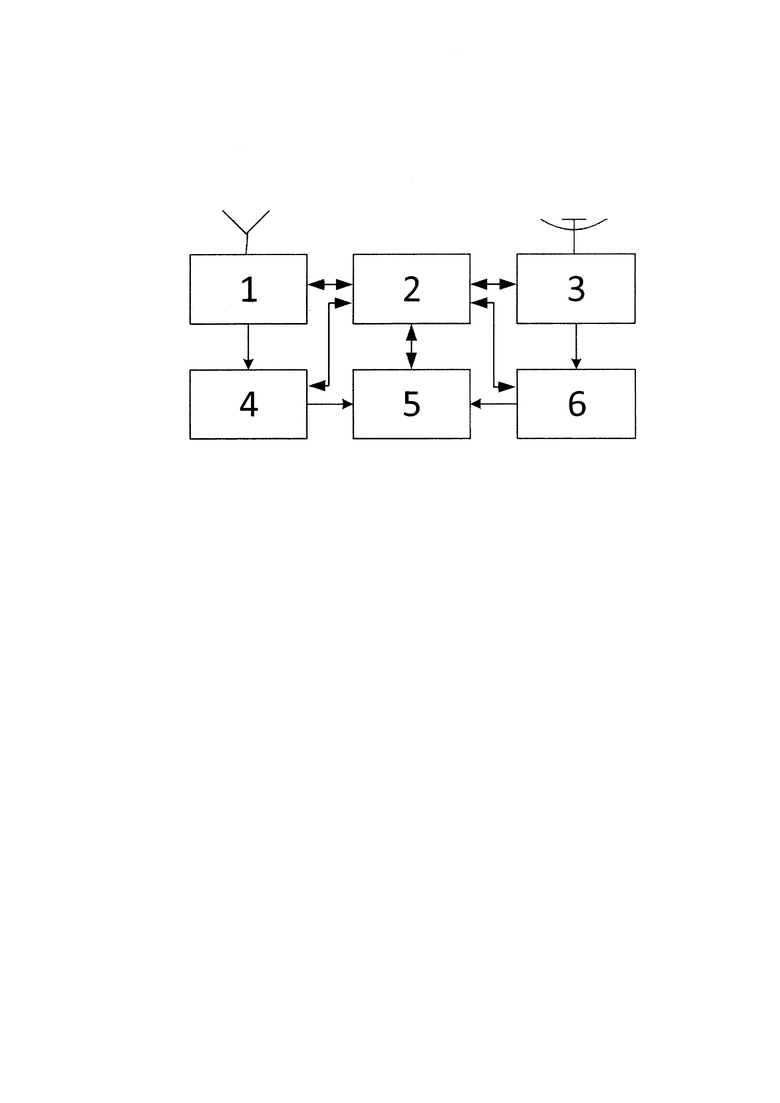
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на чертеже, где обозначено: 1 - приемник СОД; 2 - блок управления и синхронизации (БУС); 3 - РЛС; 4 - блок обработки информационного сообщения (БОИС); 5 - блок окончательной обработки информации (БООИ); 6 - блок предварительной обработки информации (БПОИ) от РЛС.
Приемник СОД 1 предназначен для приема информационного сообщения, переданного с очередного абонента СОД. БУС 2 предназначен для управления и синхронизации совместной работой элементов комплекса. РЛС 3 предназначена для обнаружения очередной воздушной цели и формирования оценок ее угловых координат и дальности до нее. БОИС 4 предназначен для выделения оценок пространственных координат очередного абонента СОД в заданной прямоугольной системе координат OXYZ и соответствующих дисперсий  из принятого приемником СОД 1 информационного сообщения для каждых k и i. БООИ 5 предназначен для окончательной обработки информации и формирования итогового решения об идентификационном признаке обнаруженной воздушной цели. БПОИ 6 предназначен для формирования оценок
из принятого приемником СОД 1 информационного сообщения для каждых k и i. БООИ 5 предназначен для окончательной обработки информации и формирования итогового решения об идентификационном признаке обнаруженной воздушной цели. БПОИ 6 предназначен для формирования оценок  пространственных координат обнаруженной воздушной цели в заданной прямоугольной системе координат OXYZ и соответствующих дисперсий
пространственных координат обнаруженной воздушной цели в заданной прямоугольной системе координат OXYZ и соответствующих дисперсий  для каждых k и i.
для каждых k и i.
Комплекс работает следующим образом. БУС 2 управляет совместной работой элементов комплекса и синхронизирует ее. РЛС 3 обнаруживает очередную воздушную цель и формирует оценки ее угловых координат и дальности до нее. Данная информация с выхода РЛС поступает на вход БПОИ 6. БПОИ 6 формирует оценки пространственных координат обнаруженной воздушной цели в заданной прямоугольной системе координат OXYZ и соответствующие дисперсии для каждых k и i. Величины и с выхода БПОИ 6 поступают на вход БООИ 5. Приемник СОД 1 принимает информационное сообщение, переданное с очередного абонента СОД. Данное информационное сообщение с выхода приемника СОД 1 поступает на вход БОИС 4. БОИС 4 выделяет оценки пространственных координат очередного абонента СОД в заданной прямоугольной системе координат OXYZ и соответствующие дисперсии из принятого приемником СОД 1 информационного сообщения для каждых k и i. Величины и с выхода БОИС 4 поступают на вход БООИ 5. БООИ 5 обрабатывает поступающую на его вход информацию в соответствии с выражениями (1)-(6) и формирует итоговое решение об идентификационном признаке обнаруженной воздушной цели в соответствии с выражением (7).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ идентификации воздушных целей, в котором итоговое решение об идентификационном признаке воздушной цели формируется на основе сравнения общего критериального параметра с соответствующим порогом, которые представляют собой относительную частоту частных решений «цель не является абонентом СОД» за период идентификации и ее допустимое значение соответственно, при этом, порог для общего критериального параметра задается с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что, если итоговое решение об идентификационном признаке воздушной цели формировать на основе сравнения общего критериального параметра с соответствующим порогом, которые представляют собой относительную частоту частных решений «цель не является абонентом СОД» за период идентификации и ее допустимое значение соответственно, при этом, порог для общего критериального параметра задавать с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей, то это приведет к повышению достоверности идентификации воздушных целей.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2020 |
|
RU2744335C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2023 |
|
RU2809767C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2568677C1 |
| СПОСОБ КОМПЛЕКСНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, ОБНАРУЖИВАЕМЫХ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2016 |
|
RU2692470C2 |
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2740385C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ ДВУХПОЗИЦИОННОЙ ИДЕНТИФИКАЦИИ НАЗЕМНОЙ ЦЕЛИ | 2022 |
|
RU2797996C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2024 |
|
RU2831760C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ВОЗДУШНОГО СУДНА | 2022 |
|
RU2803185C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
Изобретение относится к области радиотехники и может быть использовано при создании и модернизации средств идентификации воздушных целей. Техническим результатом является повышение достоверности идентификации воздушных целей. В заявленном способе итоговое решение об идентификационном признаке каждой обнаруженной воздушной цели формируется на основе сравнения общего критериального параметра с соответствующим порогом, который представляет собой относительную частоту частных решений «цель не является абонентом системы обмена данными» за период идентификации и ее допустимое значение соответственно. При этом порог для общего критериального параметра задается с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей. Это позволяет уменьшить отрицательное влияние случаев значительного отклонения сформированных с помощью РЛС оценок координат обнаруженных целей от аналогичных оценок их координат, полученных по каналу системы обмена данными и, как следствие, приводит к повышению достоверности идентификации воздушных целей в целом в условиях воздействия дестабилизирующих факторов. 1 ил.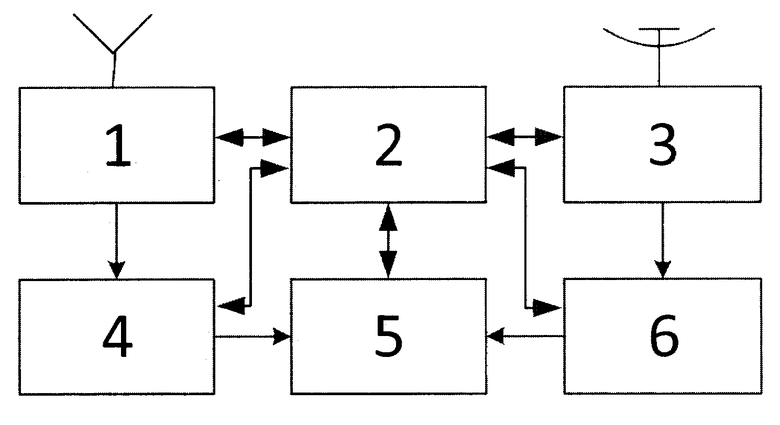
Способ идентификации воздушных целей, основанный на попарном отождествлении пространственных координат обнаруженных бортовой РЛС воздушных целей с пространственными координатами абонентов системы обмена данными (СОД), передаваемыми по каналам СОД, заключающийся в том, что обнаруживают с помощью РЛС очередную воздушную цель и формируют для каждых k и i оценки  ее пространственных координат в заданной прямоугольной системе координат OXYZ и соответствующие дисперсии
ее пространственных координат в заданной прямоугольной системе координат OXYZ и соответствующие дисперсии  , где
, где  , I - число тактов отождествления координат воздушной цели и абонента СОД в пределах периода идентификации,
, I - число тактов отождествления координат воздушной цели и абонента СОД в пределах периода идентификации,  - номер координатной оси заданной прямоугольной системы координат OXYZ, k=1 соответствует оси ОХ, k=2 соответствует оси OY, k=3 соответствует оси OZ, принимают переданное с очередного абонента СОД информационное сообщение и выделяют из него для каждых k и i оценки
- номер координатной оси заданной прямоугольной системы координат OXYZ, k=1 соответствует оси ОХ, k=2 соответствует оси OY, k=3 соответствует оси OZ, принимают переданное с очередного абонента СОД информационное сообщение и выделяют из него для каждых k и i оценки  пространственных координат данного абонента СОД в заданной прямоугольной системе координат OXYZ и соответствующие дисперсии
пространственных координат данного абонента СОД в заданной прямоугольной системе координат OXYZ и соответствующие дисперсии  , определяют для каждых k и i параметр отождествления rki в виде оценки разности пространственных координат очередной воздушной цели и очередного абонента СОД, определяют для каждых k и i дисперсию
, определяют для каждых k и i параметр отождествления rki в виде оценки разности пространственных координат очередной воздушной цели и очередного абонента СОД, определяют для каждых k и i дисперсию  параметра отождествления rki, отличающийся тем, что определяют для каждых k и i частный критериальный параметр
параметра отождествления rki, отличающийся тем, что определяют для каждых k и i частный критериальный параметр  в виде квадрата статистической оценки разности пространственных координат очередных воздушной цели и абонента СОД, определяют для каждых k и i порог hki для частного критериального параметра с учетом заданной допустимой вероятности ошибочных частных решений «цель не является абонентом СОД» в условиях отсутствия дестабилизирующих факторов, формируют для каждых k и i частное решение qki об идентификационном признаке воздушной цели путем сравнения частного критериального параметра с соответствующим порогом
в виде квадрата статистической оценки разности пространственных координат очередных воздушной цели и абонента СОД, определяют для каждых k и i порог hki для частного критериального параметра с учетом заданной допустимой вероятности ошибочных частных решений «цель не является абонентом СОД» в условиях отсутствия дестабилизирующих факторов, формируют для каждых k и i частное решение qki об идентификационном признаке воздушной цели путем сравнения частного критериального параметра с соответствующим порогом  , при этом, если частный критериальный параметр превышает порог , то формируют частное решение
, при этом, если частный критериальный параметр превышает порог , то формируют частное решение  «цель не является абонентом СОД», в противном случае формируют частное решение
«цель не является абонентом СОД», в противном случае формируют частное решение  «цель является абонентом СОД», формируют общий критериальный параметр S в виде относительной частоты частных решений «цель не является абонентом СОД» за период идентификации, задают с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей порог hq в виде допустимой относительной частоты ошибочных частных решений «цель не является абонентом СОД» за период идентификации, формируют итоговое решение q об идентификационном признаке воздушной цели путем сравнения общего критериального параметра Sq с заданным порогом hq, при этом, если общий критериальный параметр Sq превышает порог hq, то формируют итоговое решение q=0 «цель не является абонентом СОД», в противном случае формируют итоговое решение q=1 «цель является абонентом СОД».
«цель является абонентом СОД», формируют общий критериальный параметр S в виде относительной частоты частных решений «цель не является абонентом СОД» за период идентификации, задают с учетом имеющейся информации о дестабилизирующих факторах в районе идентификации воздушных целей порог hq в виде допустимой относительной частоты ошибочных частных решений «цель не является абонентом СОД» за период идентификации, формируют итоговое решение q об идентификационном признаке воздушной цели путем сравнения общего критериального параметра Sq с заданным порогом hq, при этом, если общий критериальный параметр Sq превышает порог hq, то формируют итоговое решение q=0 «цель не является абонентом СОД», в противном случае формируют итоговое решение q=1 «цель является абонентом СОД».
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2740385C1 |
| СПОСОБ КООРДИНАТНО-СВЯЗНОГО ОПОЗНАВАНИЯ С ПРИМЕНЕНИЕМ СТАТИСТИЧЕСКОЙ ОЦЕНКИ РАЗНОСТИ ПРОСТРАНСТВЕННЫХ КООРДИНАТ | 2011 |
|
RU2461019C1 |
| Способ отождествления объектов, обнаруженных несколькими системами | 2017 |
|
RU2684440C1 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| СПОСОБ ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2008 |
|
RU2386144C1 |
| Осевой разгруженный компенсатор | 1983 |
|
SU1164497A1 |
| EP 3336580 A1, 20.06.2018 | |||
| CN 109490864 A, 19.03.2019. | |||

