Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных целей, обнаруживаемых бортовой РЛС.
Наиболее близким по технической сущности к заявляемому способу (прототипом) является способ координатно-связного опознавания (навигационно-связной идентификации) с применением статистической оценки разности пространственных координат (см., например, патент на изобретение №2461019 от 10 сентября 2012 г.), основанный на попарном отождествлении пространственных координат воздушных объектов (целей), обнаруженных бортовой РЛС, с пространственными координатами воздушных объектов, являющихся абонентами системы обмена данными (СОД), передаваемыми по каналам СОД, примером которой может служить многофункциональная интегрированная система связи, навигации и опознавания (см., например Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. С. 647).
Задача идентификации заключается в установлении одного из двух идентификационных признаков для каждой обнаруженной бортовой РЛС воздушной цели: «цель является абонентом СОД» или «цель не является абонентом СОД».
К основным недостатком прототипа относится снижение вероятности правильной идентификации воздушных целей в режиме обзора пространства бортовой РЛС, при наличии единичных измерений от бортовой РЛС и СОД в условиях многоцелевой обстановки. Одной из причин этого является возникновение ошибок идентификации при отождествлении пространственных координат одного и того же абонента СОД с пространственными координатами нескольких воздушных целей, обнаруженных бортовой РЛС, в условиях многоцелевой обстановки.
Техническим результатом изобретения является повышение вероятности правильной идентификации воздушных целей в условиях многоцелевой обстановки.
Указанный результат достигается тем, что в известном способе по окончании цикла обзора пространства бортовой РЛС, определяют оценку расстояния Rij между i-й воздушной целью и j-м абонентом СОД для каждой ij-й пары «цель - абонент СОД», где  , I - число воздушных целей, обнаруженных бортовой РЛС в зоне обзора,
, I - число воздушных целей, обнаруженных бортовой РЛС в зоне обзора,  , J - число абонентов СОД, определяют дисперсии
, J - число абонентов СОД, определяют дисперсии  оценок расстояний Rij для каждых i и j, определяют параметры отождествления χij для каждой ij-й пары «цель - абонент СОД» в виде отношения квадрата оценки расстояния Rij к дисперсии данной оценки, определяют максимальную дисперсию Dmax из совокупности дисперсий
оценок расстояний Rij для каждых i и j, определяют параметры отождествления χij для каждой ij-й пары «цель - абонент СОД» в виде отношения квадрата оценки расстояния Rij к дисперсии данной оценки, определяют максимальную дисперсию Dmax из совокупности дисперсий  , с учетом максимальной дисперсии Dmax определяют допустимое пороговое значение h параметра отождествления, исключают из процесса идентификации параметры отождествления, превышающие допустимое пороговое значение h, определяют минимальный параметр отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления, присваивают идентификационный признак «цель является абонентом СОД» i-й цели, соответствующей минимальному параметру отождествления χij min, исключают из процесса идентификации параметры отождествления, касающиеся отождествленной цели и абонента СОД, повторяют процедуры, находящиеся в пределах от определения минимального параметра отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления до исключения из процесса идентификации параметров отождествления, касающихся отождествленной цели и абонента СОД до тех пор, пока не будут исключены из процесса идентификации все параметры отождествления, присваивают идентификационный признак «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД».
, с учетом максимальной дисперсии Dmax определяют допустимое пороговое значение h параметра отождествления, исключают из процесса идентификации параметры отождествления, превышающие допустимое пороговое значение h, определяют минимальный параметр отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления, присваивают идентификационный признак «цель является абонентом СОД» i-й цели, соответствующей минимальному параметру отождествления χij min, исключают из процесса идентификации параметры отождествления, касающиеся отождествленной цели и абонента СОД, повторяют процедуры, находящиеся в пределах от определения минимального параметра отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления до исключения из процесса идентификации параметров отождествления, касающихся отождествленной цели и абонента СОД до тех пор, пока не будут исключены из процесса идентификации все параметры отождествления, присваивают идентификационный признак «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД».
Сущность изобретения заключается в том, что в качестве параметра отождествления воздушных целей и абонентов СОД используется отношение квадрата оценки расстояния между данными объектами к дисперсии данной оценки, при этом осуществляется последовательное исключение параметров отождествления, превышающих допустимое пороговое значение, а также параметров отождествления, касающихся отождествленных целей и абонентов СОД, из процедуры идентификации, что исключает возможность неоднозначной привязки одного и того же абонента СОД к разным целям и тем самым позволяет повысить достоверность их идентификации в условиях многоцелевой обстановки.
Данный способ включает в себя следующие этапы:
1. В течение цикла обзора пространства бортовой РЛС:
1.1. Обнаружение бортовой РЛС воздушных целей, формирование оценок их пространственных координат: xi, yi, zi и соответствующих дисперсий: Dxi, Dyi, Dzi;
1.2. Формирование в бортовом терминале СОД оценок пространственных координат абонентов СОД: xj, yj, zj и соответствующих дисперсий: Dxj, Dyj, Dzj;
2. По окончании цикла обзора пространства бортовой РЛС:
2.1. Определение оценки расстояния Rij между i-й воздушной целью и j-м абонентом СОД для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением

2.2. Определение дисперсий  оценок расстояний Rij для каждых i и j в соответствии с выражением
оценок расстояний Rij для каждых i и j в соответствии с выражением

2.3. Определение параметра отождествления χij для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением

2.4 Определение максимальной дисперсии Dmax из совокупности дисперсий  в соответствии с выражением
в соответствии с выражением

2.5. Определение допустимого порогового значения h параметра отождествления в соответствии с выражением
где  - результат решения уравнения
- результат решения уравнения  относительно переменной hR, Р11 - заданная вероятность правильной идентификации цели являющейся абонентом СОД;
относительно переменной hR, Р11 - заданная вероятность правильной идентификации цели являющейся абонентом СОД;
2.6. Определение первого признака исключения α1ij параметра отождествления χij из процесса идентификации в соответствии с выражением

где α1ij=1 - первый признак исключения параметра отождествления χij из процесса идентификации, определяющий необходимость исключения параметра отождествления χij из процесса идентификации, α1ij=0 - первый признак исключения параметра отождествления χij из процесса идентификации, определяющий необходимость оставления параметра отождествления χij в процессе идентификации;
2.7. Исключение из процесса идентификации параметров отождествления χij, для которых α1ij=1 (исключение из процесса идентификации параметров отождествления, превышающих допустимое пороговое значение h);
2.8. Определение минимального параметра отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления в соответствии с выражением

2.9. Присвоение i-й цели, соответствующей минимальному параметру отождествления χij min, идентификационного признака «цель является абонентом СОД» в соответствии с выражением

где qi=1 - идентификационный признак i-й цели «i-я цель является абонентом СОД»,  - номер i минимального параметра отождествления χij min;
- номер i минимального параметра отождествления χij min;
2.10. Определение второго признака исключения α2ij параметра отождествления χij из процесса идентификации в соответствии с выражением

где α2ij=1 - второй признак исключения параметра отождествления из процесса идентификации, определяющий необходимость исключения параметра отождествления χij из процесса идентификации, α2ij=0 - второй признак исключения параметра отождествления из процесса идентификации, определяющий необходимость оставления параметра отождествления χij в процессе идентификации,  - номер j минимального параметра отождествления χij min;
- номер j минимального параметра отождествления χij min;
2.11. Исключение из процесса идентификации параметров отождествления χij, для которых α2ij=1 (исключение из процесса идентификации параметров отождествления, касающихся отождествленной цели и абонента СОД);
2.12. Определение минимального параметра отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления в соответствии с выражением

2.13. Повторение процедур 2.9 - 2.13 до тех пор, пока не будут исключены из процесса идентификации все параметры отождествления;
2.14. Присвоение целям, которым не присвоен идентификационный признак «цель является абонентом СОД», идентификационного признака «цель не является абонентом СОД» в соответствии с выражением

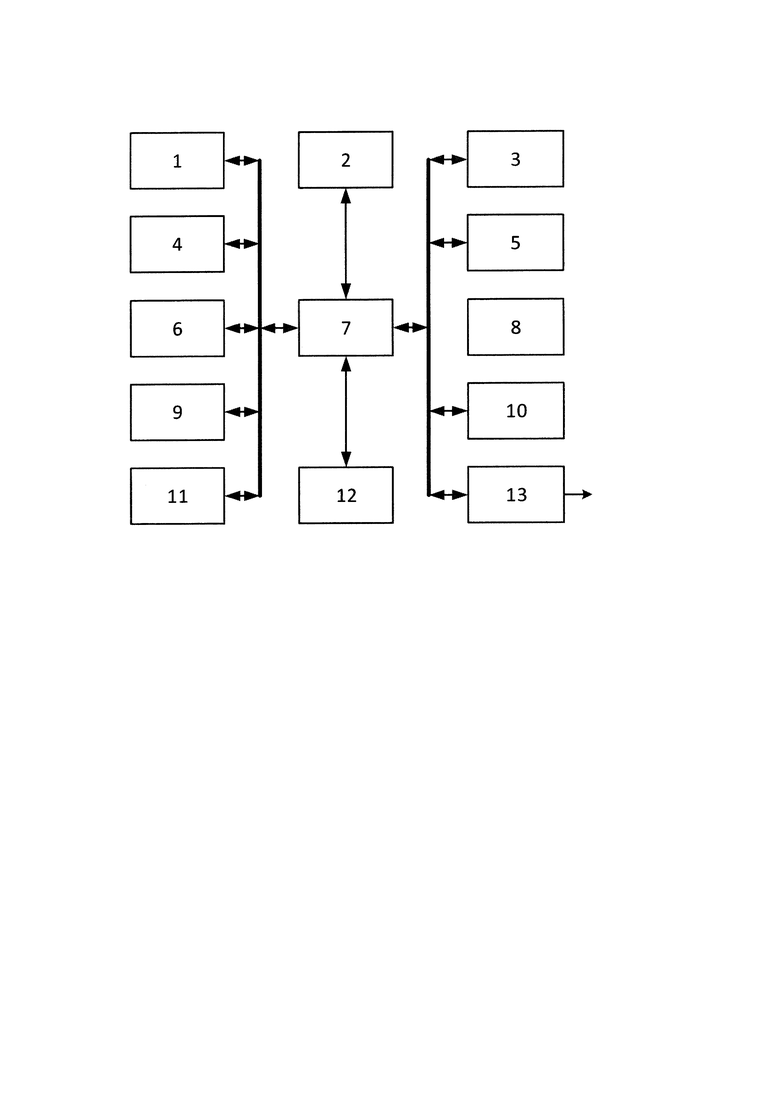
Данный способ может быть реализован, например, с помощью комплекса устройств, структурная схема которого приведена на чертеже, где обозначено: 1 - бортовая РЛС (БРЛС); 2 - бортовой терминал СОД (БТСОД); 3 - блок оценки расстояний (БОР); 4 - блок определения дисперсий (БОД); 5 - блок определения параметров отождествления (БОПО); 6 - блок определения максимальной дисперсии (БОМД); 7 - устройство управления и согласования (УУС); 8 - блок определения порогового значения (БОПЗ); 9 - пороговый фильтр параметров отождествления (ПФПО); 10 - блок проверки наличия параметров отождествления (БПНПО); 11 - блок определения минимального параметра отождествления (БОМПО); 12 - фильтр параметров отождествления отождествленных объектов (ФПООО); 13 - блок присвоения идентификационных признаков (БПИП).
БРЛС 1 предназначена для обнаружения воздушных целей, формирования оценок их пространственных координат: xi, yi, zi и соответствующих дисперсий Dxi, Dyi, Dzi в течение цикла обзора пространства. БТСОД 2 предназначен для формирования оценок пространственных координат абонентов СОД: xj, yj, zj и соответствующих дисперсий: Dxj, Dyj, Dzj. БОР 3 предназначен для оценки расстояния Rij между i-й воздушной целью и j-м абонентом СОД для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением (1). БОД 4 предназначен для определения дисперсий  оценок расстояний Rij для каждых i и j в соответствии с выражением (2). БОПО 5 предназначен для определения параметра отождествления χij для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением (3); БОМД 6 предназначен для определения максимальной дисперсии Dmax из совокупности дисперсий
оценок расстояний Rij для каждых i и j в соответствии с выражением (2). БОПО 5 предназначен для определения параметра отождествления χij для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением (3); БОМД 6 предназначен для определения максимальной дисперсии Dmax из совокупности дисперсий  в соответствии с выражением (4). УУС 7 предназначено для управления работой комплекса и согласования его элементов; БОПЗ 8 предназначен для определения допустимого порогового значения h параметра отождествления в соответствии с выражением (5). ПФПО 9 предназначен для определения первого признака исключения α1ij параметра отождествления χij из процесса идентификации в соответствии с выражением (6) и последующего исключения из процесса идентификации параметров отождествления χij, ддя которых α1ij=1. БПНПО 10 предназначен: 1) для проверки наличия параметров отождествления после этапов их фильтрации в ПФПО 9 и ФПООО 12; 2) для формирования управляющего сигнала об окончании процесса идентификации при отсутствии параметров отождествления с выходов ПФПО 9 и ФПООО 12. БОМПО 11 предназначен для определения минимального параметра отождествления из совокупности не исключенных из процесса идентификации параметров отождествления после фильтрации в ПФПО 9 в соответствии с выражением (7), а после фильтрации в ФПООО 12 в соответствии с выражением (10). ФПООО 12 предназначен для определения в соответствии с выражением (9) второго признака исключения α2ij параметра отождествления χij из процесса идентификации и последующего исключения из процесса идентификации параметров отождествления χij, для которых α2ij=1. БГГИП 13 предназначен: 1) для присвоения i-й цели, соответствующей минимальному параметру отождествления χij min, идентификационного признака «цель является абонентом СОД» в соответствии с выражением (8) после этапа определения минимального параметра отождествления χij min в БОМПО 11; 2) для присвоения идентификационного признака «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД», в соответствии с выражением (11) после поступления сигнала об окончании процесса идентификации (после исключения всех параметров отождествления из процесса идентификации).
в соответствии с выражением (4). УУС 7 предназначено для управления работой комплекса и согласования его элементов; БОПЗ 8 предназначен для определения допустимого порогового значения h параметра отождествления в соответствии с выражением (5). ПФПО 9 предназначен для определения первого признака исключения α1ij параметра отождествления χij из процесса идентификации в соответствии с выражением (6) и последующего исключения из процесса идентификации параметров отождествления χij, ддя которых α1ij=1. БПНПО 10 предназначен: 1) для проверки наличия параметров отождествления после этапов их фильтрации в ПФПО 9 и ФПООО 12; 2) для формирования управляющего сигнала об окончании процесса идентификации при отсутствии параметров отождествления с выходов ПФПО 9 и ФПООО 12. БОМПО 11 предназначен для определения минимального параметра отождествления из совокупности не исключенных из процесса идентификации параметров отождествления после фильтрации в ПФПО 9 в соответствии с выражением (7), а после фильтрации в ФПООО 12 в соответствии с выражением (10). ФПООО 12 предназначен для определения в соответствии с выражением (9) второго признака исключения α2ij параметра отождествления χij из процесса идентификации и последующего исключения из процесса идентификации параметров отождествления χij, для которых α2ij=1. БГГИП 13 предназначен: 1) для присвоения i-й цели, соответствующей минимальному параметру отождествления χij min, идентификационного признака «цель является абонентом СОД» в соответствии с выражением (8) после этапа определения минимального параметра отождествления χij min в БОМПО 11; 2) для присвоения идентификационного признака «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД», в соответствии с выражением (11) после поступления сигнала об окончании процесса идентификации (после исключения всех параметров отождествления из процесса идентификации).
Комплекс устройств работает следующим образом. УУС 7 управляет работой комплекса и согласует его элементы. В течение цикла обзора пространства БРЛС 1 обнаруживает воздушные цели, формирует оценки их пространственных координат: xi, yi, zi и соответствующие дисперсии Dxi, Dyi, Dzi. Информация об оценках пространственных координат обнаруженных воздушных целей через УУС 7 поступает в БОР 3, а информация о соответствующих дисперсиях в БОД 4. БТСОД 2 формирует оценки пространственных координат абонентов СОД: xj, yj, zj и соответствующие дисперсии: Dxj, Dyj, Dzj. Информация об оценках пространственных координат абонентов СОД через УУС 7 поступает в БОР 3, а информация о соответствующих дисперсиях в БОД 4. БОР 3 оценивает расстояние Rij между i-й воздушной целью и j-м абонентом СОД для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением (1). Информация об оценках расстояний Rij поступает через УУС 7 в БОПО 5. БОД 4 определяет дисперсии  оценок расстояний Rij для каждых i и j в соответствии с выражением (2). Информация о дисперсиях
оценок расстояний Rij для каждых i и j в соответствии с выражением (2). Информация о дисперсиях  через УУС 7 поступает в БОПО 5 и БОМД 6. БОПО 5 определяет параметры отождествления χij для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением (3). Информация о параметрах отождествления χij поступает через УУС 7 в ПФПО 9. БОМД 6 определяет максимальную дисперсию Dmax из совокупности дисперсий
через УУС 7 поступает в БОПО 5 и БОМД 6. БОПО 5 определяет параметры отождествления χij для каждой ij-й пары «цель - абонент СОД» в соответствии с выражением (3). Информация о параметрах отождествления χij поступает через УУС 7 в ПФПО 9. БОМД 6 определяет максимальную дисперсию Dmax из совокупности дисперсий  в соответствии с выражением (4). Информация о максимальной дисперсии Dmax через УУС 7 поступает в БОПЗ 8. БОПЗ 8 определяет допустимое пороговое значение h параметра отождествления в соответствии с выражением (5). Информация о допустимом пороговом значении h через УУС 7 поступает в ПФПО 9. ПФПО 9 определяет в соответствии с выражением (6) для каждых i и j первые признаки исключения α1ij - параметров отождествления χij из процесса идентификации и исключает из процесса идентификации параметры отождествления χij, ддя которых α1ij=1. Информация о не исключенных из процесса идентификации параметрах отождествления через УУС 7 поступает в БПНПО 10. БПНПО 10 проверяет наличие параметров отождествления с выхода ПФПО 9 и, при их наличии, передает информацию о них через УУС 7 на БОМПО 11, а в случае отсутствия параметров отождествления с выхода ПФПО 9 передает управляющий сигнал об окончании процесса идентификации через УУС 7 на БПИП 13. БОМПО 11 определяет в соответствии с выражением (7) минимальный параметр отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления. Информация о минимальном параметре отождествления χij min через УУС 7 поступает в БПИП 13 и ФПООО 12. БПИП 13 присваивает i-й цели, соответствующей минимальному параметру отождествления χij min, идентификационный признак «цель является абонентом СОД» в соответствии с выражением (8). ФПООО 12 определяет в соответствии с выражением (9) вторые признаки исключения α2ij параметров отождествления χij из процесса идентификации и исключает из процесса идентификации параметры отождествления χij, для которых α2ij=1. Информация о не исключенных из процесса идентификации после фильтрации в ФПООО 12 параметрах отождествления через УУС 7 поступает в БПНПО 10. БПНПО 10 проверяет наличие параметров отождествления с выхода ФПООО 12 и, при их наличии, передает информацию о них через УУС 7 на БОМПО 11, а в случае отсутствия параметров отождествления с выхода ФПООО 12 передает управляющий сигнал об окончании процесса идентификации через УУС 7 на БПИП 13. БПИП 13 при получении управляющего сигнала об окончании процесса идентификации присваивает в соответствии с выражением (11) идентификационный признак «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД».
в соответствии с выражением (4). Информация о максимальной дисперсии Dmax через УУС 7 поступает в БОПЗ 8. БОПЗ 8 определяет допустимое пороговое значение h параметра отождествления в соответствии с выражением (5). Информация о допустимом пороговом значении h через УУС 7 поступает в ПФПО 9. ПФПО 9 определяет в соответствии с выражением (6) для каждых i и j первые признаки исключения α1ij - параметров отождествления χij из процесса идентификации и исключает из процесса идентификации параметры отождествления χij, ддя которых α1ij=1. Информация о не исключенных из процесса идентификации параметрах отождествления через УУС 7 поступает в БПНПО 10. БПНПО 10 проверяет наличие параметров отождествления с выхода ПФПО 9 и, при их наличии, передает информацию о них через УУС 7 на БОМПО 11, а в случае отсутствия параметров отождествления с выхода ПФПО 9 передает управляющий сигнал об окончании процесса идентификации через УУС 7 на БПИП 13. БОМПО 11 определяет в соответствии с выражением (7) минимальный параметр отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления. Информация о минимальном параметре отождествления χij min через УУС 7 поступает в БПИП 13 и ФПООО 12. БПИП 13 присваивает i-й цели, соответствующей минимальному параметру отождествления χij min, идентификационный признак «цель является абонентом СОД» в соответствии с выражением (8). ФПООО 12 определяет в соответствии с выражением (9) вторые признаки исключения α2ij параметров отождествления χij из процесса идентификации и исключает из процесса идентификации параметры отождествления χij, для которых α2ij=1. Информация о не исключенных из процесса идентификации после фильтрации в ФПООО 12 параметрах отождествления через УУС 7 поступает в БПНПО 10. БПНПО 10 проверяет наличие параметров отождествления с выхода ФПООО 12 и, при их наличии, передает информацию о них через УУС 7 на БОМПО 11, а в случае отсутствия параметров отождествления с выхода ФПООО 12 передает управляющий сигнал об окончании процесса идентификации через УУС 7 на БПИП 13. БПИП 13 при получении управляющего сигнала об окончании процесса идентификации присваивает в соответствии с выражением (11) идентификационный признак «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД».
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ навигационно-связной идентификации воздушных целей сущность которого заключается в том, что в качестве параметра отождествления воздушных целей и абонентов СОД используется отношение квадрата оценки расстояния между данными объектами к дисперсии данной оценки, при этом осуществляется последовательное исключение параметров отождествления, превышающих допустимое пороговое значение, а также параметров отождествления, касающихся отождествленных целей и абонентов СОД, из процедуры идентификации.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что использование в качестве параметра отождествления воздушных целей и абонентов СОД отношения квадрата оценки расстояния между данными объектами к дисперсии данной оценки с последовательным исключением параметров отождествления, превышающих допустимое пороговое значение, а также параметров отождествления, касающихся отождествленных целей и абонентов СОД, из процедуры идентификации увеличивает вероятность правильной идентификации воздушных объектов.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2568677C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2792021C1 |
| СПОСОБ НАВИГАЦИОННО-СВЯЗНОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2020 |
|
RU2744335C1 |
| СПОСОБ КОМПЛЕКСНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ, ОБНАРУЖИВАЕМЫХ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2016 |
|
RU2692470C2 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2014 |
|
RU2567243C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791599C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791600C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации воздушных целей, обнаруживаемых бортовой РЛС. Техническим результатом изобретения является повышение вероятности правильной идентификации воздушных целей в условиях многоцелевой обстановки. Сущность изобретения заключается в том, что в качестве параметра отождествления воздушных целей и абонентов системы обмена данными (СОД) используется отношение квадрата оценки расстояния между данными объектами к дисперсии данной оценки, при этом осуществляется последовательное исключение параметров отождествления, превышающих допустимое пороговое значение, а также параметров отождествления, касающихся отождествленных целей и абонентов СОД, из процедуры идентификации, что исключает возможность неоднозначной привязки одного и того же абонента СОД к разным целям и тем самым позволяет повысить достоверность их идентификации в условиях многоцелевой обстановки. 1 ил.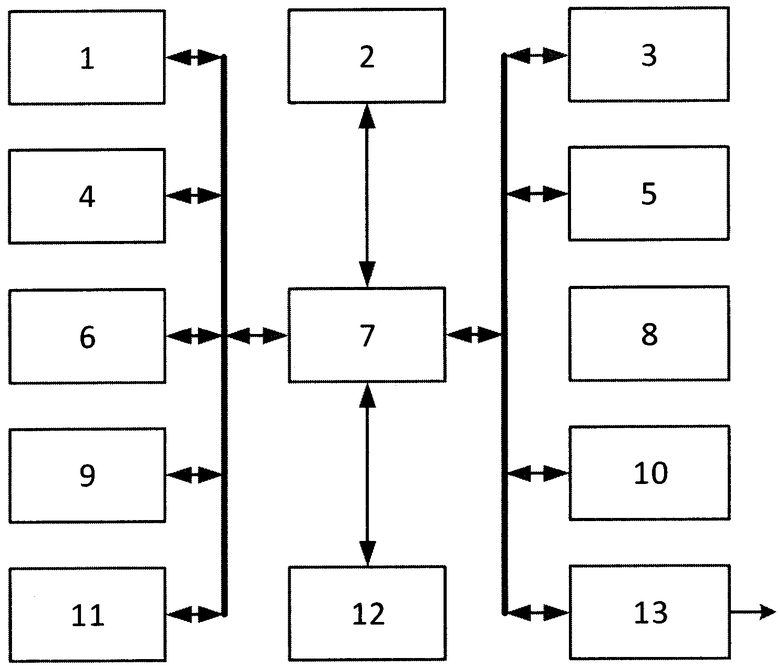
Способ навигационно-связной идентификации, основанный на обнаружении в течение цикла обзора пространства бортовой радиолокационной станцией воздушных целей, формировании оценок их пространственных координат и соответствующих дисперсий, формировании оценок пространственных координат абонентов системы обмена данными (СОД) и соответствующих дисперсий, отличающийся тем, что по окончании цикла обзора пространства бортовой РЛС определяют оценку расстояния Rij между i-й воздушной целью и j-м абонентом СОД для каждой ij-й пары «цель - абонент СОД», где  , I - число воздушных целей, обнаруженных бортовой РЛС в зоне обзора,
, I - число воздушных целей, обнаруженных бортовой РЛС в зоне обзора,  , J - число абонентов СОД, определяют дисперсии
, J - число абонентов СОД, определяют дисперсии  оценок расстояний Rij для каждых i и j, определяют параметры отождествления χij для каждой ij-й пары «цель - абонент СОД» в виде отношения квадрата оценки расстояния Rij к дисперсии данной оценки, определяют максимальную дисперсию Dmax из совокупности дисперсий
оценок расстояний Rij для каждых i и j, определяют параметры отождествления χij для каждой ij-й пары «цель - абонент СОД» в виде отношения квадрата оценки расстояния Rij к дисперсии данной оценки, определяют максимальную дисперсию Dmax из совокупности дисперсий  , с учетом максимальной дисперсии Dmax определяют допустимое пороговое значение h параметра отождествления, исключают из процесса идентификации параметры отождествления, превышающие допустимое пороговое значение h, определяют минимальный параметр отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления, присваивают идентификационный признак «цель является абонентом СОД» i-й цели, соответствующей минимальному параметру отождествления χij min, исключают из процесса идентификации параметры отождествления, касающиеся отождествленной цели и абонента СОД, повторяют процедуры, находящиеся в пределах от определения минимального параметра отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления до исключения из процесса идентификации параметров отождествления, касающихся отождествленной цели и абонента СОД до тех пор, пока не будут исключены из процесса идентификации все параметры отождествления, присваивают идентификационный признак «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД».
, с учетом максимальной дисперсии Dmax определяют допустимое пороговое значение h параметра отождествления, исключают из процесса идентификации параметры отождествления, превышающие допустимое пороговое значение h, определяют минимальный параметр отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления, присваивают идентификационный признак «цель является абонентом СОД» i-й цели, соответствующей минимальному параметру отождествления χij min, исключают из процесса идентификации параметры отождествления, касающиеся отождествленной цели и абонента СОД, повторяют процедуры, находящиеся в пределах от определения минимального параметра отождествления χij min из совокупности не исключенных из процесса идентификации параметров отождествления до исключения из процесса идентификации параметров отождествления, касающихся отождествленной цели и абонента СОД до тех пор, пока не будут исключены из процесса идентификации все параметры отождествления, присваивают идентификационный признак «цель не является абонентом СОД» целям, которым не присвоен идентификационный признак «цель является абонентом СОД».
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2568677C1 |
| СПОСОБ КООРДИНАТНО-СВЯЗНОГО ОПОЗНАВАНИЯ С ПРИМЕНЕНИЕМ СТАТИСТИЧЕСКОЙ ОЦЕНКИ РАЗНОСТИ ПРОСТРАНСТВЕННЫХ КООРДИНАТ | 2011 |
|
RU2461019C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ОТМЕТОК ЦЕЛЕЙ, ПОЛУЧЕННЫХ ДВУМЯ ПРОСТРАНСТВЕННО-СОВМЕЩЕННЫМИ РЛС | 2017 |
|
RU2668214C2 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2312370C2 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| СПОСОБ ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2008 |
|
RU2386144C1 |
| JPS 60159669 A, 21.08.1985 | |||
| Осевой разгруженный компенсатор | 1983 |
|
SU1164497A1 |
| Дефекосатуратор | 1957 |
|
SU107901A1 |
| CN 106526549 A, 22.03.2017. | |||

