Настоящее изобретение относится к системе управления тяговым усилием и торможением железнодорожного состава.
В частности, настоящее изобретение относится к системе управления тяговым усилием и торможением железнодорожного состава, содержащего главный ведущий локомотив, по меньшей мере один задний или промежуточный ведомый локомотив и несколько вагонов или вагонеток и снабженного пневматической тормозной системой, то есть, каждый из локомотивов оснащен устройством для управления тягой и торможением, связанным с соответствующими устройствами ручного управления и соответствующим электронным блоком управления, а также приемно-передающими устройствами, посредством которых электронный блок управления ведущего локомотива способен осуществлять связь с блоком управления упомянутого по меньшей мере одного ведомого локомотива; причем устройство выполнено таким образом, что система управления тягой и торможением по меньшей мере одного ведомого локомотива может управляться ведущим локомотивом.
В известных железнодорожных составах все локомотивы работают синхронно, то есть ведомый локомотив или локомотивы выполняют все команды по управлению тяговым усилием и торможением, подаваемые машинистом состава.
Преимущество этой системы управления заключается в том, что она чрезвычайно проста в эксплуатации, а машинист ведущего локомотива управляет составом тем же способом, как если бы локомотив находился в голове поезда.
Однако такие системы имеют ограниченные возможности контроля холостого хода. Действительно, на профилях некоторых участков такие системы управления могут иметь ограниченные возможности по компенсации значительных продольных сил, возникающих между подвижными объектами, входящими в состав, в условиях растяжения или сжатия, что приводит к появлению опасных нагрузок и чревато возникновением аварийных ситуаций.
Существуют устройства, которые облегчают процесс управления и осуществляют регистрацию действий машиниста, а именно команд по управлению тяговым усилием и торможением, и на их основе «предсказывают» поведение состава на путях. Однако такие системы основаны на способности машиниста использовать личный опыт для «толкования» предоставленного прогноза и отдавать соответствующие команды. Такие системы также не могут решить проблему управления холостым ходом состава на участках путей со «сложными» профилями.
Одна из задач настоящего изобретения заключается в том, чтобы предложить систему управления тяговым усилием и торможением железнодорожного состава определенного выше типа, усовершенствованную для более эффективного решения проблем, изложенных выше.
Эта и другие задачи выполняются благодаря изобретению системы управления тяговым усилием и торможением указанного выше типа, отличающейся тем, что блок управления в ведущем локомотиве связан с:
- датчиками, выполненными с возможностью передачи в упомянутый блок управления сигналов, несущих информацию о скорости и/или ускорении ведущего локомотива и командах управления, подаваемых машинистом в устройства управления тяговым усилием и торможением,
- запоминающими устройствами, хранящими данные о структуре состава, данные, определяющие математическую модель динамических характеристик продольного движения состава, данные, определяющие профиль участка, по которому движется состав, а также данные о по меньшей мере одной предопределенной функциональной цели;
- устройствами позиционирования, передающими сигналы с информацией о положении состава в режиме реального времени и установленными на упомянутом участке; и
- человеко-машинным интерфейсом для информирования машиниста;
блок управления ведущего локомотива, выполненный с возможностью проверки соответствия инструкций, направляемых машинистом с помощью устройств управления тяговым усилием и торможением, указанной функциональной цели и для использования человеко-машинного интерфейса, чтобы предоставить машинисту инструкции, касающиеся того, каким образом необходимо осуществлять управление данными устройствами для достижения упомянутой цели; а также
- выдачи сигналов управления тяговым усилием и/или торможением в установленном порядке и в соответствии с данными, хранящимися в упомянутых запоминающих устройствах, и информацией, полученной от упомянутых датчиков и устройств позиционирования, а также для передачи упомянутых сигналов в блок управления по меньшей мере одного упомянутого ведомого локомотива посредством упомянутых приемно-передающих устройств.
В другом варианте осуществления изобретения блок управления ведущего локомотива также выполнен с возможностью выдачи дополнительных сигналов управления тягой и/или торможением в установленном порядке и использования упомянутых дополнительных сигналов управления для регулирования работы устройств управления тяговым усилием и торможением ведущего локомотива.
Другие характеристики и преимущества системы, предложенной в соответствии с настоящим изобретением, будут очевидны из следующего подробного описания, которое дается исключительно в виде неограничивающего примера со ссылкой на прилагаемые чертежи:
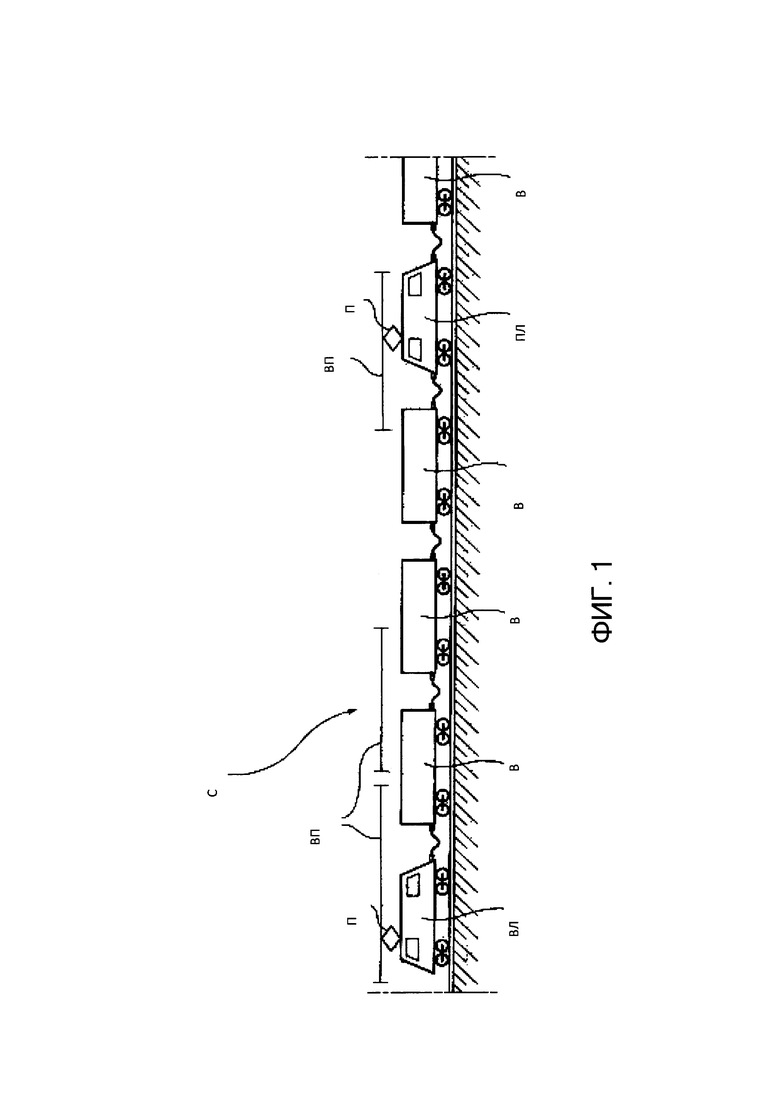
На Фиг. 1 представлен частичный схематический вид сбоку железнодорожного состава, оснащенного системой управления тяговым усилием и торможением в соответствии с настоящим изобретением;
на Фиг. 2 представлена блок-схема, показывающая оборудование главного ведущего локомотива железнодорожного состава, оснащенного системой управления в соответствии с настоящим изобретением; а также
на Фиг. 3 представлена аналогичная блок-схема, показывающая контрольное оборудование каждого ведомого локомотива железнодорожного состава, оснащенного системой управления в соответствии с настоящим изобретением.
На Фиг. 1 справочный знак С обозначает железнодорожный состав в целом, включая главный ведущий локомотив ВЛ и, по меньшей мере, один промежуточный или задний ведомый локомотив ПЛ, а также несколько вагонов или вагонеток В.
В другом варианте осуществления изобретения, показанном схематически на Фиг. 1, локомотивы ВЛ и ПЛ представляют собой электрические локомотивы, получающие питание от верхнего проводника ВП через соответствующие пантографы П. Однако сфера применения изобретения не ограничивается железнодорожными составами с описанными локомотивами.
Железнодорожный состав С оснащен пневматической тормозной системой известного типа, которая предполагает, что все вагоны состава соединены пневматически трубой тормозной магистрали, в которой поддерживается заданное давление, например, 5 бар, что удерживает тормоза всех вагонов открытыми.
Падение давления в трубе тормозной магистрали, вызванное приведением в действие пускового устройства тормоза в кабине машиниста ведущего локомотива ВЛ, распространяется по всему железнодорожному составу и доходит до тормозных устройств отдельных вагонов. Распределительный элемент в упомянутых вагонах, который обычно связан с цилиндром управления и вспомогательным цилиндром, обеспечивает поступление воздуха в тормозные цилиндры, тем самым осуществляя торможение состава.
Последующее повышение давления в трубе тормозной магистрали вновь открывает тормоза всего состава.
Блок-схемы на Фиг. 2 и 3 иллюстрируют ключевые элементы оборудования главного ведущего локомотива ВЛ и, соответственно, ведомого локомотива ПЛ железнодорожного состава С.
Как показано на указанных фигурах, каждый из локомотивов ВЛ и ПЛ оснащен соответствующими устройствами управления тяговым усилием 1 и торможением 2, связанными с соответствующими устройствами управления 3 и 4, которые могут приводиться в действие вручную из кабины машиниста.
Каждый локомотив ВЛ и ПЛ также оснащен соответствующим электронным блоком управления ЭБУВ и ЭБУП и приемно-передающими устройствами 5, позволяющими упомянутым электронным блокам обмениваться информацией.
В другом варианте осуществления изобретения, показанном в качестве примера, приемно-передающие устройства могут взаимодействовать друг с другом по радио с использованием соответствующей антенны 6. Однако это решение не является обязательным, и упомянутые приемно-передающие устройства могут обмениваться информацией по другим каналам, например, по кабелям или оптоволокну.
В системе управления тяговым усилием и торможением, в соответствии с изобретением, блок управления ЭБУВ ведущего локомотива ВЛ связан с датчиками 8, выполненными с возможностью передачи электрических сигналов, несущих информацию о скорости и/или ускорении упомянутого локомотива.
Блок управления ЭБУВ ведущего локомотива ВЛ также связан с детекторами 9 и 10, выполненными с возможностью передачи сигналов, несущих информацию о командах, поданных машинистом упомянутого локомотива, с помощью устройств управления тяговым усилием 3 и торможением 4, соответственно.
Блок управления ЭБУВ также связан с запоминающими устройствами 11, в которых хранятся данные, описывающие структуру железнодорожного состава С, и другими запоминающими устройствами 12, хранящими данные, используемые для определения математической модели динамических характеристик продольного движения состава С.
Другие запоминающие устройства 13, которые также связаны с блоком ЭБУВ, хранят данные, которые используются для определения профиля участка путей, по которому движется состав С.
Другие запоминающие устройства 14, связанные с блоком управления ЭБУВ, используются для хранения данных, определяющих алгоритм управления и по меньшей мере одну предопределенную функциональную цель.
Несмотря на то, что блок-схемы на Фиг. 2 и 3 показывают запоминающие устройства 11-14 как внешние по отношению к блокам управления ЭБУВ и ЭБУП, упомянутые запоминающие устройства также могут быть встроены в упомянутые блоки управления.
Согласно Фиг. 2, блок управления ЭБУВ ведущего локомотива ВЛ также связан с устройствами позиционирования 15, которые предназначены для передачи сигналов, несущих информацию о положении упомянутого локомотива, а, следовательно, и всего состава С на упомянутом участке в режиме реального времени. В качестве устройств позиционирования могут выступать инерционные и/или спутниковые платформы (GPS и аналоги) или другие системы.
Блок ЭБУВ также связан с человеко-машинным интерфейсом 16, который предназначен для предоставления информации/инструкций машинисту ведущего локомотива ВЛ.
Этот блок управления ЭБУВ предназначен для управления тяговым усилием и торможением железнодорожного состава С, как описано ниже.
Упомянутый блок ЭБУВ, в частности, предназначен для проверки того, согласуются ли команды, заданные машинистом ведущего локомотива ВЛ (и, следовательно, железнодорожного состава С), с заданной функциональной целью, данные о которой хранятся в запоминающих устройствах 14.
Эта функциональная цель может заключаться, например, в уменьшении динамических нагрузок, передаваемых между вагонами железнодорожного состава С при его движении.
Альтернативная или дополнительная функциональная цель может заключаться, например, в поддержании постоянной заданной скорости на определенном участке путей с ограничением скорости движения.
Соответствие команд, подаваемых машинистом с использованием устройств управления тяговым усилием и торможением 3, 4, вышеупомянутым функциональным целям, проверяется посредством использования информации, содержащейся в запоминающих устройствах 11-14 (структура железнодорожного состава С, математическая модель динамических характеристик движения состава С, профиль участка, алгоритм управления и функциональные цели), информации, предоставляемой системой позиционирования 15, и информации, предоставляемой детекторами 9 и 10, связанными с устройствами управления тяговым усилием и торможением 3,4.
Блок управления ЭБУВ также предназначен для использования информации, полученной от устройств 8-15, для выдачи сигналов управления тяговым усилием и торможением ведомого локомотива или локомотивов ПЛ. Упомянутые сигналы управления передаются в блок управления ЭБУВ по меньшей мере одного ведомого локомотива ПЛ посредством приемно-передающих устройств 5, 6.
В каждом ведомом локомотиве ПЛ сигналы управления тяговым усилием и торможением от блока управления ЭБУВ ведущего локомотива ВЛ принимаются местным блоком управления ЭБУП, который получает контроль над системой управления тяговым усилием 1 и торможением 2 соответствующего ведомого локомотива ПЛ.
В описанном выше варианте осуществления изобретения, управление тяговым усилием и торможением ведущего локомотива ВЛ полностью производится машинистом, а блок управления ЭБУВ может быть сконструирован соответствующим образом для предоставления упомянутому машинисту, посредством человеко-машинного интерфейса 16, информации/инструкций, касающейся соответствия подаваемых им команд назначенной (-ым) функциональной (-ым) цели (-ям).
И наоборот, тяговое усилие и торможение каждого из ведомых локомотивов ПЛ полностью зависят от команд, подаваемых блоком управления ЭБУВ ведущего локомотива ВЛ, и передаваемых в блок управления ЭБУП соответствующего ведомого локомотива ПЛ.
В другом варианте осуществления изобретения, тяговое усилие и управление ведущим локомотивом ВЛ контролируются частично с использованием команд, подаваемых вручную машинистом с использованием управляющих устройств 3 и 4, и частично с использованием сигналов управления, генерируемых блоком ЭБУВ, на основе информации, предоставленной упомянутому блоку устройствами 8-15.
Такой «смешанный» способ управления тяговым усилием и торможением ведущего локомотива ВЛ помогает оптимизировать управление движением железнодорожного состава.
Алгоритм управления и выбора решения, реализованный в блоке управления ЭБУВ, может быть спроектирован с использованием искусственного интеллекта, например, нейронных сетей или сетей Петри.
В соответствии с настоящим изобретением, система управления помогает оптимизировать контроль динамических характеристик продольного движения состава С в зависимости от профиля участка, по которому осуществляется движение, и повысить эффективность использования такого железнодорожного состава в определенных обстоятельствах (трогание с места, торможение, боксование и т.д.).
Сравнение блок-схем на Фиг. 2 и 3 показывает, как архитектура оборудования каждого из ведомых локомотивов ПЛ похожа на архитектуру оборудования ведущего локомотива ВЛ.
В общем, для реализации упомянутых способов управления, для каждого из ведомых локомотивов ПЛ требуются только устройства, показанные на Фиг. 3 сплошной линией.
Тем не менее, не будет лишним оснастить все локомотивы, как ВЛ, так и ПЛ, одинаковым оборудованием, которое можно будет использовать избирательно - как в качестве оборудования ведущего локомотива, так и в качестве оборудования ведомого локомотива, таким образом, чтобы каждый локомотив мог выполнять роль главного ведущего, промежуточного или заднего ведомого. Таким образом, архитектура оборудования, показанная на Фиг. 3, может быть модифицирована путем добавления устройств, показанных на фигуре пунктирной линией и обозначенных теми же справочными знаками, что и на Фиг. 2.
Естественно, несмотря на принцип изобретения, средства его реализации и конкретные варианты осуществления могут сильно отличаться от описанных и проиллюстрированных исключительно в виде неограничивающего примера, при этом не выходя за рамки, определенные в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБМЕНА МЕСТАМИ ВЕДУЩЕГО И ОТДАЛЕННОГО ЛОКОМОТИВОВ В ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ С РАСПРЕДЕЛЕННОЙ ЭНЕРГИЕЙ | 2005 |
|
RU2387552C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОВЫМ ПОЕЗДОМ С МНОЖЕСТВОМ ЛОКОМОТИВОВ | 2016 |
|
RU2722048C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗАМИ СОЕДИНЕННЫХ ПОЕЗДОВ | 2010 |
|
RU2453457C2 |
| Интеллектуальная система управления тормозами локомотива | 2016 |
|
RU2729496C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2481988C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2470814C2 |


Изобретение относится к управлению тяговой системой транспортных средств. Система управления тяговым усилием и торможением железнодорожного состава содержит в каждом из локомотивов устройства для управления тягой и торможением, связанные с устройствами ручного управления и электронным блоком управления, а также приемно-передающие устройства. Блок управления в ведущем локомотиве связан с датчиками скорости и/или ускорения ведущего локомотива и датчиками, несущими информацию о командах управления, поданных машинистом с помощью устройств ручного управления, запоминающими устройствами, устройствами позиционирования и человеко-машинным интерфейсом для информирования машиниста. Блок управления ведущего локомотива проверяет соответствия команд, направляемых машинистом, функциональной цели и предоставляет машинисту инструкции, каким образом необходимо осуществлять ручное управление. Блок управления ведущего локомотива выдает сигналы управления в соответствии с данными, хранящимися в запоминающих устройствах, и информацией, полученной от датчиков и устройств позиционирования, и передает упомянутые сигналы в блок управления ведомого локомотива посредством приемно-передающих устройств. Технический результат заключается в оптимизации управления движением железнодорожного состава. 2 з.п. ф-лы, 3 ил.
1. Система управления тяговым усилием и торможением железнодорожного состава (С), содержащего главный ведущий локомотив (ВЛ), по меньшей мере один задний или промежуточный ведомый локомотив (ПЛ) и несколько вагонов или вагонеток (В) и снабженного пневматической тормозной системой, то есть каждый из локомотивов (ВЛ, ПЛ) оснащен устройством для управления тягой (1) и торможением (2), связанным с соответствующими устройствами ручного управления (3; 4) и соответствующим электронным блоком управления (ЭБУВ; ЭБУП), а также приемно-передающими устройствами (5, 6), посредством которых электронный блок управления (ЭБУВ) ведущего локомотива (ВЛ) способен осуществлять связь с блоком управления (ЭБУП) упомянутого по меньшей мере одного ведомого локомотива (ПЛ); причем устройство выполнено таким образом, что система управления тягой (1) и торможением (2) ведомого локомотива (ПЛ) может управляться ведущим локомотивом (ВЛ);
отличающаяся тем, что блок управления (ЭБУВ) в ведущем локомотиве (ВЛ) связан с:
- датчиками (8), выполненными с возможностью передачи в упомянутый блок управления сигналов, несущих информацию о скорости и/или ускорении ведущего локомотива (ВЛ)
датчиками (9-10), выполненными с возможностью передачи сигналов, несущих информацию о командах управления, поданных машинистом с помощью устройств ручного управления тяговым усилием (3) и торможением (4);
- запоминающими устройствами (11-14), хранящими данные о структуре состава (С), данные, определяющие математическую модель динамических характеристик продольного движения состава (С), данные, определяющие профиль участка, по которому движется состав (С), а также данные о как минимум одной функциональной цели;
- устройствами позиционирования (15), передающими сигналы c информацией о положении состава (С) в режиме реального времени и установленными на упомянутом участке; и
- человеко-машинным интерфейсом (16) для информирования машиниста;
блок управления (ЭБУВ) ведущего локомотива (ВЛ) предназначен для
- проверки соответствия команд, направляемых машинистом с помощью устройств ручного управления тяговым усилием (1) и торможением (2), по меньшей мере одной упомянутой функциональной цели и для использования человеко-машинного интерфейса (16), чтобы предоставить машинисту инструкции, касающиеся того, каким образом необходимо осуществлять управление данными устройствами ручного управления (3, 4) для достижения упомянутой функциональной цели; а также
- выдачи сигналов управления тяговым усилием и/или торможением в установленном порядке и в соответствии с данными, хранящимися в упомянутых запоминающих устройствах (11-14), и информацией, полученной от упомянутых датчиков (8-10) и устройств позиционирования (15), а также для передачи упомянутых сигналов в блок управления (ЭБУП) по меньшей мере одного упомянутого ведомого локомотива (ПЛ) посредством упомянутых приемно-передающих устройств (5, 6).
2. Система управления по п. 1, отличающаяся тем, что блок управления (ЭБУВ) ведущего локомотива (ВЛ) также предназначен для выдачи сигналов управления тяговым усилием и/или торможением в установленном порядке и в соответствии с данными, хранящимися в упомянутых запоминающих устройствах (11-14), и информацией, полученной от упомянутых датчиков (8-10) и устройств позиционирования (15), а также для использования упомянутых сигналов для контроля устройств управления тяговым усилием (1) и торможением (2) ведущего локомотива (ВЛ).
3. Система управления по пп. 1, 2, отличающаяся тем, что блок управления (ЭБУП) каждого из ведомых локомотивов (ПЛ) связан с теми же датчиками и устройствами (8-16), с которыми связан блок управления (ЭБУВ) ведущего локомотива (ВЛ); блоки управления (ЭБУВ, ЭБУП) ведущего локомотива (ВЛ) и ведомого локомотива или локомотивов (ПЛ) предназначены для работы как в качестве ведущего блока управления, так и ведомого.
| US 2010235022 A1, 16.09.2010 | |||
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| DE 102012108395 A1, 13.03.2014 | |||
| DE 10249714 A1, 19.05.2004 | |||
| Соосная коническая зубчатая передача | 1950 |
|
SU92636A1 |
| US 5950967 A, 14.09.1999. | |||

