Изобретение предназначено для использования в управлении операциями по обеспечению работоспособного состояния технических объектов и может быть использовано при проведении текущего ремонта автомобильной техники. Цель изобретения заключается в повышении эффективности выполнения операций текущего ремонта автомобильной техники. Сущность изобретения заключается в том, что принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов, формируют информацию о признаках возникновения и причинах отказа, выполняют поиск и распознавание вида отказа, определяют отказавшие элементы, применяют меры по предотвращению распространения неисправности и ее возможных последствий, выполняют замену и/или восстановление отказавших элементов, контролируют функционирование автомобиля.
Известна автоматизированная система диагностирования цифровых устройств (патент РФ на изобретение №2430406, G06F 11/00(2006.01), опубл. 27.09.2011 г.). Система содержит ПЭВМ, включающую процессор, клавиатуру, дисплей, память, принтер, блок питания, программируемый порт входа-выхода подключенные к системной шине, устройство сопряжения, включающее блок шинных формирователей, шины адреса, данных и управления, дешифратор, селектор, буферные элементы, образующие блок цифровых интерфейсов, подключенный через устройство контактирования к объекту диагностирования, программируемые порты входа-выхода, образующие устройство управления блоком цифровых интерфейсов, а также блок аналоговых входов, блок аналоговых выходов, выход которого через устройство контактирования подключен к объекту диагностирования, к ПЭВМ дополнительно подключен блок управляющих элементов, в устройство сопряжения дополнительно введены: блок питания с контролем потребления, подключенный через устройство контактирования к объекту диагностирования, формирователь электромагнитного поля, образующий с блоком аналоговых выходов блок аналоговых и электромагнитных выходов, блок контроля электромагнитного поля, образующий с блоком аналоговых входов блок аналоговых и электромагнитных входов, а также устройство управления блоком аналоговых и электромагнитных входов, подключенное к блоку аналоговых и электромагнитных входов, устройство управления блоком аналоговых и электромагнитных выходов, подключенное к блоку аналоговых и электромагнитных выходов; блок цифровых интерфейсов дополнен блоком шинных формирователей, шиной адреса, шиной данных, шиной управления, дешифратором, селектором, буферными элементами и выполнен в виде двух модулей: модуля цифровых выходов и модуля цифровых входов, а блок питания с контролем потребления, устройство управления блоком аналоговых и электромагнитных входов, устройство управления блоком цифровых интерфейсов, устройство управления блоком аналоговых и электромагнитных выходов, подключены к программируемому порту входа-выхода через дополнительно введенный интерфейсный модуль, что дисплей выполнен в виде жидкокристаллического сенсорного монитора. Изобретение относится к вычислительной и контрольно-измерительной технике и может быть использовано для проверки работоспособности и поиска неисправных элементов цифровых и аналоговых устройств.
Недостатком данного изобретения является сложность и высокая стоимость изготовления, его использование ограничено проверкой работоспособности и поиском неисправных элементов, проверке подлежат лишь элементы электронных устройств.
Наиболее близким к предлагаемому изобретению является циклический способ локализации неконтролируемых множественных отказов технических систем в процессе их функционирования и устройство для его реализации (патент РФ на изобретение №2557441, G06F 11/00(2006.01), опубл. 20.07.2015 г.) [1]. Суть способа заключается в том, что принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов с булевыми элементами, из вектора проявлений отказов с использованием канонизатора матрицы выходов формируют вектор начальных оценок технического состояния элементов объекта диагностирования с триплексными значениями «работоспособен», «не работоспособен», «состояние не определено», с помощью триплексной логической модели обратной зависимости, использующей матрицу обратной зависимости, циклически уточняют вектор оценок технического состояния элементов объекта диагностирования до тех пор, пока его оценки не перестанут изменяться либо пока не будет выполнено заданное число тактов, после этого уточняют значения элементов вектора оценок технического состояния со значением "состояние не определено" на основе использования триплексной логической модели прямой зависимости распространения отказов, использующей логическую матрицу прямой зависимости, после этого выдают окончательное значение вектора оценок технического состояния элементов объекта диагностирования. Изобретение относится к области вычислительной и контрольно-измерительной техники и может использоваться в системах функционального диагностирования, обеспечивающих локализацию отказов (поиска места отказа) в технических системах на основе информации о внешних проявлениях этих отказов.
Недостатком данного изобретения является отсутствие выполнения в способе операций по локализации неконтролируемых множественных отказов технических систем в процессе их функционирования, так как способ, исходя из названия изобретения, направлен на локализацию неконтролируемых множественных отказов, а технический результат способа достигается повышением эффективности диагностирования технического состояния объектов высокой сложности, в описании же изобретения указывается о том, что полученным техническим результатом является повышение оперативности, глубины и достоверности диагностирования технического состояния объектов высокой сложности, при этом функции локализации, а именно поиск неисправной составной части или нескольких составных частей на соответствующем уровне разукрупнения и предотвращение распространения неисправности и ее возможных последствий не выполняются.
Настоящее изобретение направлено на повышение эффективности выполнения операций текущего ремонта автомобильной техники.
Решение поставленной задачи достигается тем, что принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов, формируют информацию о признаках возникновения и причинах отказа, выполняют поиск и распознавание вида отказа, определяют отказавшие элементы, применяют меры по предотвращению распространения неисправности и ее возможных последствий, выполняют замену и/или восстановление отказавших элементов, контролируют функционирование автомобиля.
Сопоставительный анализ с прототипом показывает, что при реализации способа формируют информацию о признаках возникновения и причинах отказа, выполняют поиск и распознавание вида отказа, определяют отказавшие элементы, применяют меры по предотвращению распространения неисправности и ее возможных последствий, выполняют замену и/или восстановление отказавших элементов, контролируют функционирование автомобиля.
Формирование информации о признаках возникновения и причинах отказа, выполнение поиска и распознавания вида отказа, определение отказавших элементов, применение мер по предотвращению распространения неисправности и ее возможных последствий, выполнение замены и/или восстановление отказавших элементов, контроль функционирования автомобиля позволяет сделать вывод о соответствии предлагаемого способа обеспечения работоспособного состояния автомобильной техники критерию "существенные отличия".
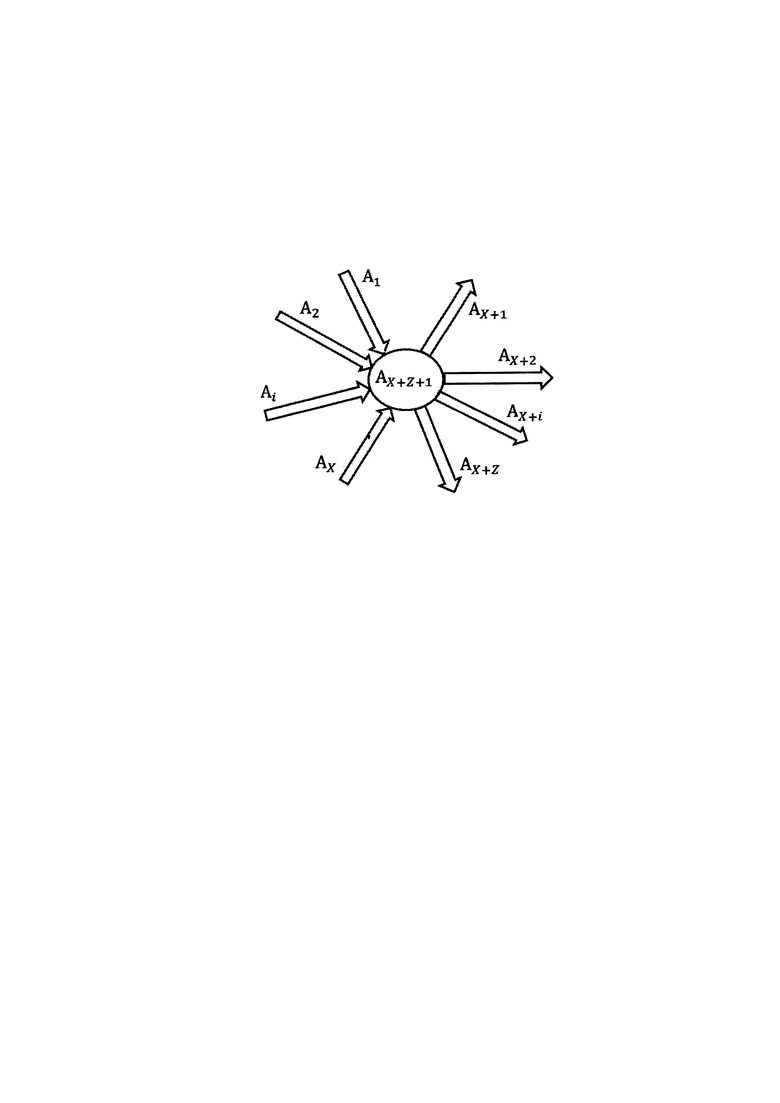
На чертеже представлен граф из Х+Z+1 элементов.
Согласно ГОСТ 18322-2016 под текущим ремонтом понимают ремонт, выполняемый для обеспечения или восстановления работоспособности объекта, он состоит в замене и/или восстановлении отдельных легкодоступных его частей. Согласно этому же ГОСТу ремонт включает операции локализации, диагностирования, устранения неисправности и контроль функционирования.
Сущность предлагаемого способа обеспечения работоспособного состояния автомобильной техники состоит в следующем: принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов, формируют информацию о признаках возникновения и причинах отказа для чего описывают параметрический граф технического состояния совокупностью систем векторов наличия отказа, как представлено в выражении 1:
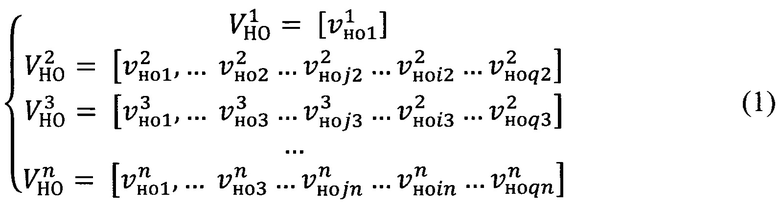
где  - вектор наличия отказа n-го уровня иерархии параметрического графа технического состояния компонента автомобиля;
- вектор наличия отказа n-го уровня иерархии параметрического графа технического состояния компонента автомобиля;
 - i-й элемент вектора функционального отказа n-го уровня иерархии параметрического графа технического состояния компонента автомобиля;
- i-й элемент вектора функционального отказа n-го уровня иерархии параметрического графа технического состояния компонента автомобиля;
qn - количество элементов (длина) векторов наличия отказа n-го уровня иерархии.
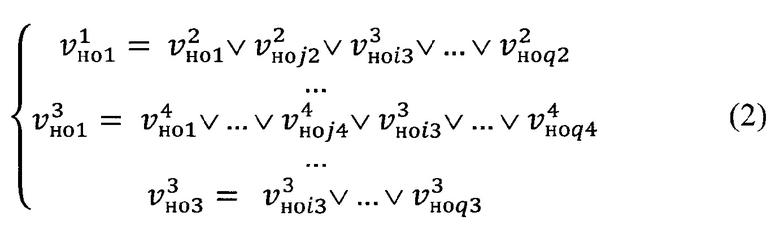
Логические выражения межуровневых связей позволяют описать техническое состояние составных частей автомобильной техники, как представлено в выражении 2:
Для формирования признаков отказа используют координаты векторов выражения 1. В зависимости от того выполняются элементами составных частей автомобильной техники соответствующих им функциональных задач или нет и соответствует ли уровень их выполнения требованиям, отображенным в эксплуатационной документации на образец автомобильной техники, координаты соответствуют значению 0 - в случае удовлетворения уровня выполнения всех условий и 1 - при условии наличия отказа. На каждом уровне параметрического графа технического состояния (1, 2, 3…n) путем составного перебора двоичных значений координат вектора VH0 получают множество признаков наличия различных отказов элементов автомобильной техники VПН0, включающее  одноуровневых векторов наличия отказа:
одноуровневых векторов наличия отказа:

где у=1, 2, 3…n - уровень параметрического графа технического состояния.
Произведение векторов наличия различных отказов элементов составных частей автомобиля формирует множество признаков различных отказов автомобильной техники на всех уровнях параметрического графа технического состояния С:
Используя выражение 3, получают:

Основываясь на правой части выражения 5, формируют кортежи признаков отказа:

где 
Каждый подобный кортеж соответствует системе векторов наличия отказов со своими значениями координат и характеризует признаки проявления конкретного отказа элемента отдельной составной части автомобильной техники на всех уровнях иерархии параметрического графа технического состояния. На основе сформированного множества признаков различных отказов составных частей автомобильной техники на всех уровнях параметрического графа технического состояния С для каждого отказа можно найти признак его наличия.
Путем подстановки в систему 2 значений соответствующих координат векторов кортежа множества  определяют недостающие, с точки зрения параметрического графа, координаты вектора наличия отказа. Данную операцию обозначают через с.
определяют недостающие, с точки зрения параметрического графа, координаты вектора наличия отказа. Данную операцию обозначают через с.
Считают, что если на каком-то уровне параметрического графа не выполняется функциональная задача, то все обеспечивающие функции нижестоящих уровней также не выполняются. Операцию заполнения системы векторов наличия отказов обозначают через δ:

где  - кортеж векторов наличия отказов, являющийся функциональной причиной отказа.
- кортеж векторов наличия отказов, являющийся функциональной причиной отказа.
В данном случае  .
.
Основываясь на выражении 7, делают вывод о том, что причине возникновения отказа соответствует кортеж вектора наличия отказов  , где Р - множество функциональных причин различных отказов отдельных компонентов автомобиля, которые могут быть получены на основе множества С,
, где Р - множество функциональных причин различных отказов отдельных компонентов автомобиля, которые могут быть получены на основе множества С,  .
.
Устанавливают соответствие между функциональными задачами отдельных составных частей автомобиля и выходными параметрами их элементов на каждом структурном уровне иерархии для чего используют множество матриц связи, каждая из которых устанавливает соответствие между функциональными задачами составных частей автомобиля и выходными параметрами их элементов, то есть техническим состоянием на каждом структурном уровне иерархии.
В общем случае матрица связи представляет собой матрицу размерностью τ×n, как показано в выражении 8:

где τ - количество выполняемых задач, предусмотренных эксплуатационной документацией на данном уровне иерархии параметрического графа технического состояния;
n - количество выходных параметров данного структурного уровня компонента автомобиля.
Для любой составной части автомобиля необходимо иметь набор матриц связи. Общее количество матриц связи определяется выражением 9:

где L - количество уровней иерархии структурных элементов составной части автомобиля;
U - количество уровней параметрического графа.
Совокупность матриц связи всех уровней параметрического графа технического состояния с одним структурным уровнем выглядит в виде кортежа:

Установление причины отказа на определенном структурном уровне основано на поэлементном произведении множества функциональных причин различных отказов отдельных компонентов автомобиля на кортеж  . Вектор наличия отказа каждого уровня параметрического графа технического состояния умножают на соответствующую матрицу связи:
. Вектор наличия отказа каждого уровня параметрического графа технического состояния умножают на соответствующую матрицу связи:

Выполняют поиск и распознавание вида отказа, для чего создают и исследуют структурно-функциональную модель автомобильной техники, позволяющую описать структуру и функции составляющих элементов техники вплоть до их параметров, определяют критерии распознавания видов отказа.
Для построения модели решают две частные задачи:
- обеспечивают представление элементов автомобиля в виде элементов графа и функций элементов техники в виде функций элементов графа;
- создают модель графа, описывающую как взаимное расположение элементов, так и их функциональное назначение.
Для решения первой частной задачи представляют типовые элементы составляющих частей автомобиля вершинами, а функциональные связи между ними - ребрами. В результате получают неориентированный граф, который называют структурным графом, делают его ориентированным, для чего ставят в соответствие ориентации ребер графа направление функционального воздействия.
Вторую задачу построения модели решают в три этапа. На первом этапе описывают элементы структур графа и их взаимного расположения, на втором описывают функциональное назначение элементов графа, на третьем совмещают результаты первого и второго этапов.
В качестве примера, при реализации первого этапа допустим существует граф из Х+Z+1 элементов, как показано на фиг., в котором AX+Z+1 - вершина графа, А1, А2…AX - входящие в вершину ребра, AX+1, AX+2…AX+Z - выходящие из вершины ребра. В общем случае Х≠Z. Очевидно, что семейство входящих ребер связано с семейством выходящих ребер и элементом связи является вершина. Тогда используют основные операторы алгебры высказываний, формально описывают семейства ребер с помощью оператора логического сложения ∨, а их взаимосвязь - с помощью оператора логического умножения &. Используя оператор эквиваленции, устанавливают соответствие между вершиной и ребрами с учетом их взаимосвязи, как отображено в выражении 12:

Выражение 12 трактуют следующим образом: вершина AX+Z+1 устанавливает взаимосвязь между входящими ребрами А1, А2…AX и выходящими АХ+1, АХ+2…AX+Z. Аналогичным образом описывают ребро графа. Набор связанных определенным образом элементов будет представлять собой систему подобных выражений.
При реализации второго этапа, для представления функционального назначения элементов графа используют выражение, которое определяет множество значений функции F:

где А* - функция элемента;
Q - множество определений функции.
В общем случае, в выражении 13, функциональным назначением функции элемента графа А считают отображение множества Q в F:

Используют определение функции qi и значение функции ƒi.: 
Функциональное назначение элементов графа описывают системой из выражений вида 15.
Завершая решение второй частной задачи, на третьем этапе совмещают выражения 12 и 15. В результате в левой части выражения получают элемент графа AX+Z+1, который предназначен для выполнения функции  . Следовательно, AX+Z+1 и неразрывно связаны друг с другом:
. Следовательно, AX+Z+1 и неразрывно связаны друг с другом:

При этом несостоятельность одного из них неминуемо влечет за собой несостоятельность другого. Это реализуется при помощи оператора логического умножения &. С одной стороны выражения 16 для элемента AX+Z+1 создается определение функции qi, с другой - прием значения функции ƒi. Оператор логического перемещения  выполняет одновременно два действия - отображение и логическое умножение, причем
выполняет одновременно два действия - отображение и логическое умножение, причем  указывает, какое воздействие производится, а & - как оно воздействует.
указывает, какое воздействие производится, а & - как оно воздействует.
Отсутствие выражения с правой либо с левой стороны знака влечет за собой отсутствие всей правой части выражения:
В общем случае структурный граф из N элементов описывают системой из N выражений:
где j, t, s - количество элементов Ai, обеспечивающих формирование набора определений qi для элементов  ;
;
y, m, r - количество элементов Ag, обеспечивающих получение набора значений ƒg для элементов .
Система выражений 17 описывает элементы автомобильной техники с учетом одностороннего направления воздействия их друг на друга (работа агрегатов трансмиссии при движении автомобиля в одном направлении). Для этого используется прямо ориентированный граф. Решая задачу описания работы, с учетом противоположенного первоначальному воздействию элементов, используют обратно ориентированный граф. Его моделью является система выражений 18:
Модель представляет собой систему выражений, описывающих как взаимное расположение элементов графа, так и их функциональное назначение в работоспособном состоянии составных частей автомобильной техники, далее формируют модель, которая характеризует предполагаемое состояние. Формирование основывается на изменениях, вносимых в разработанную модель с учетом предполагаемого состояния автомобиля. Используют условие о выполнении элементами автомобиля соответствующих им функциональных задач или нет, принимают значение ƒ равным 0 - выполняют, равным 1 - нет. Модель предполагаемого состояния составных частей автомобиля получают подстановкой в модель, описывающей работоспособное состояние соответствующих значений ƒ.
Для получения элементов А&А* модели, где определены отсутствующие значения функций, из правой части системы выражений, описывающей составную часть автомобиля в работоспособном состоянии, поэлементно вычитают правые части системы выражений, которые описывают технику в состоянии, в котором предположительно находится компонент автомобильной техники. В результате получают систему выражений, которая позволяет выявить элементы в неработоспособном состоянии, определенную путем разности эталонной системы и системы, описывающей состояние в момент поиска отказа.
Из системы выявления отказа определяют элементы автомобиля, которые подлежат проверке на работоспособность. Они соответствуют элементам модели, которые не эквивалентны нулю. Получают набор структурно неделимых на выбранном уровне иерархии элементов замены или восстановления автомобиля.
Формирование процесса распознавания вида отказа начинают с определения критериев решаемой задачи и возможных неработоспособных состояний элементов автомобильной техники. В настоящее время при определении вида отказа пользуются терминами и определениями, перечисленными в ГОСТ 27.002-2015 и раскрывающими его сущность. Определяют в качестве критериев распознавания вида отказа следующие положения:
1. Вероятность отсутствия отказа: в рассматриваемой составной части автомобиля все элементы работоспособны, показатели их работы в пределах, установленных эксплуатационной документацией. Этот критерий инициирует начало процесса распознавания вида отказа.
2. Вероятность возникновения зависимого отказа: в неработоспособном состоянии подозревают несколько элементов одной составной части автомобиля, при этом несколько параметров, на которые влияют неработоспособные элементы, находятся за пределами допуска.
3. Вероятность возникновения независимого отказа: в неработоспособном состоянии находится один элемент составной части автомобиля, который является источником отказа.
4. Наличие либо отсутствие комбинации зависимых и независимых отказов: критерий используют на начальном этапе процесса распознавания вида отказа.
Комплексное применение критериев позволит распознать и определить вид возникшего отказа в соответствии с классификацией.
Для распознавания вида отказа реализуют следующие операции: при выполнении критерия вероятности отсутствия отказа распознавание вида отказа не осуществляют, при невыполнении критерия вероятности отсутствия отказа выявляют наличие неисправности, при этом выполняют анализ схемы и порядка работы всех составных частей автомобиля, используют критерий наличия либо отсутствия комбинации зависимых и независимых отказов, данный критерий позволяет либо определить наличие нескольких отказов, либо сконцентрировать внимание на каком-то одном отказе, в случае если в результате применения критерия установлено наличие одного отказа, выявлен независимый отказ, в противном случае к каждому из обнаруженных отказов применяют критерий зависимого отказа, данный критерий позволяет либо определить наличие нескольких независимых отказов, либо подтвердить наличие зависимого отказа.
Определяют отказавшие элементы составной части автомобиля, для чего разрабатывают идентификационную модель этих компонентов.
Исходной информацией для формирования идентификационной модели являет причина возникновения отказа и схемы воздействия элементов.
Посредством реакции влияющих друг на друга элементов в схеме воздействия элементов образуется связь данных взаимодействий. Для описания схемы воздействия элементов зависимых воздействий вводят оператор отображения взаимодействий элементов автомобиля  , где n - отдельно взятая схема составной части, которой принадлежит оператор, описывающий связь зависимых воздействий через элемент графа неработоспособной составной части. Схему воздействия элементов описывают следующим выражением:
, где n - отдельно взятая схема составной части, которой принадлежит оператор, описывающий связь зависимых воздействий через элемент графа неработоспособной составной части. Схему воздействия элементов описывают следующим выражением:

где O1 - схема зависимых воздействий;  - оператор отображения схемы.
- оператор отображения схемы.
В случае, если элемент составной части автомобильной техники принимает от другого элемента воздействие, то представление выражения 19 происходит с использованием определения функции qi, в противном случае представление функции происходит через значение функции ƒi.
Очевидно, что связям подлежат сами элементы с их функциями. Как и раньше, их неразрывную связь описывают оператором логического умножения &. Используют оператор отображения схемы для установления связи между предыдущим элементом графа и значением его функции с последующим элементом графа и значением его функции в схеме воздействия элементов.
Схему зависимых воздействий одного элемента на стоящего за ним в общем случае описывают следующим выражением:

где u - количество операторов отображения в схеме;
Апред & ƒпред - формализованный вид предыдущего элемента графа и значение его функции в общей схеме;
Апослед & ƒпослед - формализованный вид последующего элемента графа и значение его функции в общей схеме.
Система из N схем зависимых воздействий в общем случае будет являться идентификационной моделью, позволяющей посредством преобразований определить отказавшие элементы составной части автомобильной техники:
где On - n-я схема зависимых воздействий элементов;  - оператор отображения n-й схемы;
- оператор отображения n-й схемы;
u - количество операторов отображения в 1-й схеме;
l - количество операторов отображения в n-й схеме.
Используя условие о выполнении элементами составной части автомобиля соответствующих им функциональных задач или нет, ƒ принимает значение 0, что указывает на соответствие всем требованиям, определенным эксплуатационной документацией, в противном случае в случае отказа ƒ будет соответствовать 1. Это условие определяет в формализованном виде наличие операторов цепного отображения в случае присутствия отказа в составной части автомобиля. Другими словами, отсутствие отказа в компоненте автомобиля в формализованном виде характеризуется отсутствием операторов цепного отображения и нулевым значением в правой части выражения, описывающего схему работы этого компонента. Модель предполагаемого состояния составных частей автомобиля получают подстановкой в модель, описывающей работоспособное состояние соответствующих значений ƒ.
Для выявления отказавшего элемента создают систему выявления отказа. В общем случае систему выявления отказа находят путем поэлементного вычитания правой части системы, описывающей реальное состояние компонента автомобильной техники из правой части системы, описывающей работоспособное состояние.
Параметры системы выявления неработоспособного состояния элементов составных частей позволят идентифицировать вид отказа, а также структурно-неделимые на данном уровне иерархии элементы, подозреваемые в неработоспособном состоянии.
Общий вид каждого выражения системы выявления отказа составных частей автомобильной техники имеет вид:

Применяют меры по предотвращению распространения неисправности и ее возможных последствий, выполняют замену и/или восстановление отказавших элементов, контролируют функционирование автомобиля.
Формирование информации о признаках возникновения и причинах отказа, выполнение поиска и распознавания вида отказа, определение отказавших элементов, применение мер по предотвращению распространения неисправности и ее возможных последствий, выполнение замены и/или восстановление отказавших элементов, контроль функционирования автомобиля дают возможность оперативно организовать обеспечение процесса текущего ремонта необходимой эксплуатационной документацией, выбрать технические средства обеспечения работоспособного состояния и их оптимальное количество, установить необходимые минимальные требования к специалистам, привлекаемым к выполнению текущего ремонта, определить возможность устранения различных отказов одновременно и, основываясь на полученной информации, установить возможное количество одновременно задействованных специалистов, что приводит к повышению эффективность выполнения операций текущего ремонта автомобильной техники.
Таким образом, в способе обеспечения работоспособного состояния автомобильной техники принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов, формируют информацию о признаках возникновения и причинах отказа, выполняют поиск и распознавание вида отказа, определяют отказавшие элементы, применяют меры по предотвращению распространения неисправности и ее возможных последствий, выполняют замену и/или восстановление отказавших элементов, контролируют функционирование автомобиля, тем самым повышают эффективность выполнения операций текущего ремонта автомобильной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ АВТОМОБИЛЬНОЙ ТЕХНИКИ | 2019 |
|
RU2731740C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ АВТОМОБИЛЬНОЙ ТЕХНИКИ | 2019 |
|
RU2708774C1 |
| СПОСОБ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ АВТОМОБИЛЬНОЙ ТЕХНИКИ | 2019 |
|
RU2730787C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| ЦИКЛИЧЕСКИЙ СПОСОБ ЛОКАЛИЗАЦИИ НЕКОНТРОЛИРУЕМЫХ МНОЖЕСТВЕННЫХ ОТКАЗОВ ТЕХНИЧЕСКИХ СИСТЕМ В ПРОЦЕССЕ ИХ ФУНКЦИОНИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2557441C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ РЕГУЛЯТОРА НАПРЯЖЕНИЯ | 2019 |
|
RU2718559C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ СТАРТЕРА | 2019 |
|
RU2708527C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| Прибор встроенного автоматического диагностирования автомобилей и тракторов | 2021 |
|
RU2825499C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ АККУМУЛЯТОРНОЙ БАТАРЕИ | 2018 |
|
RU2697404C1 |
Изобретение предназначено для использования в управлении операциями по обеспечению работоспособного состояния технических объектов и может быть использовано при проведении текущего ремонта автомобильной техники. Для обеспечения работоспособного состояния автомобильной техники принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов, формируют информацию о признаках возникновения и причинах отказа, выполняют поиск и распознавание вида отказа, определяют отказавшие элементы, применяют меры по предотвращению распространения неисправности и ее возможных последствий, выполняют замену и/или восстановление отказавших элементов, контролируют функционирование автомобиля. Достигается повышение эффективности выполнения операций текущего ремонта автомобильной техники. 1 ил.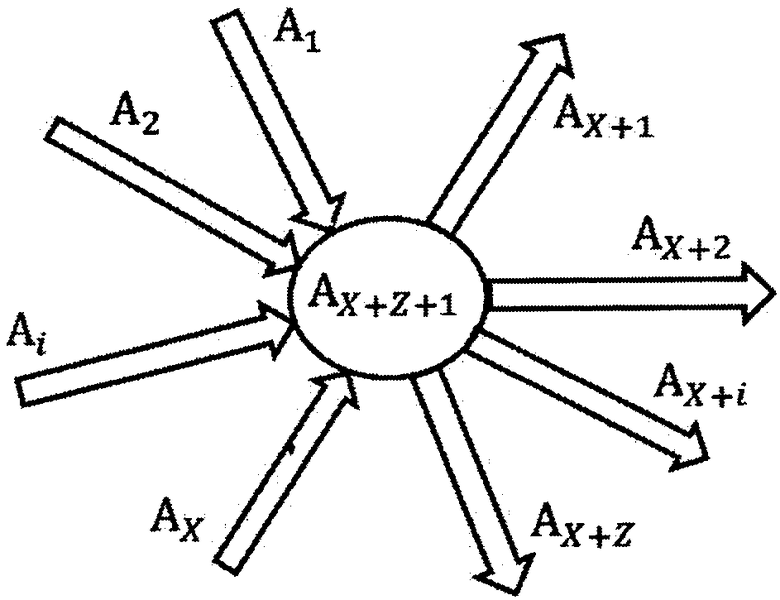
Способ обеспечения работоспособного состояния автомобильной техники, при котором принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов, отличающийся тем, что формируют информацию о признаках возникновения и причинах отказа, выполняют поиск и распознавание вида отказа, определяют отказавшие элементы, применяют меры по предотвращению распространения неисправности и ее возможных последствий, выполняют замену и/или восстановление отказавших элементов, контролируют функционирование автомобиля.
| JP 2003076803 A, 14.03.2003 | |||
| JP 2001154727 A, 08.08.2001 | |||
| ЦИКЛИЧЕСКИЙ СПОСОБ ЛОКАЛИЗАЦИИ НЕКОНТРОЛИРУЕМЫХ МНОЖЕСТВЕННЫХ ОТКАЗОВ ТЕХНИЧЕСКИХ СИСТЕМ В ПРОЦЕССЕ ИХ ФУНКЦИОНИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2557441C2 |
| Модуль для дистанционной диагностики, адаптации и базовых настроек электронных систем автомототранспорта и спецтехники | 2014 |
|
RU2616543C2 |
| JP 2003002176 A, 08.01.2003. | |||

