Область техники
Изобретение относится к области вычислительной и контрольно-измерительной техники и может использоваться в системах функционального диагностирования, обеспечивающих локализацию отказов (поиска места отказа) в технических системах на основе информации о внешних проявлениях этих отказов.
Предшествующий уровень техники
Под функциональным диагностированием понимается процесс определения отказа и поиска места отказа на фоне естественных сигналов технической системы, т.е. когда система используется по назначению и на нее поступают рабочие (а не тестовые) воздействия [Машиностроение. Энциклопедия. Т. III-7. Измерения, контроль, диагностика / Под общ. ред. В.В. Клюева. - М.: Машиностроение, 1996. С. 404], [Основы технической диагностики. Кн. 1. Модели объектов, методы и алгоритмы диагноза / Под ред. П.П. Пархоменко. - М.: Энергия, 1976. С. 13].
Диагностирование технических систем включает, по крайней мере, две задачи:
- проверка правильности функционирования объекта;
- поиск неисправностей, т.е. указание мест и возможных причин отказов, приведших к нарушению работоспособности или к неправильному функционированию объекта.
В настоящем изобретении способ и устройство решают вторую из названных задач, а именно - поиск неисправностей.
Под неконтролируемыми отказами в изобретении понимаются отказы подсистем, блоков, модулей или элементов технической системы (далее - объекта диагностирования), которые не определяются непосредственно системами контроля (включая встроенные средства контроля). С позиций современной теории систем такие отказы могут относиться как к наблюдаемым, т.е. обладающим потенциальной возможностью их обнаружения, так и ненаблюдаемым, т.е. не имеющим такой потенциальной возможности. В первом случае предлагаемые здесь способ и устройство дают указание на место отказа, а во втором - формируют решение о недостаточности располагаемой информации для решения задачи локализации.
Возникновение неконтролируемого отказа в системе может приводить к нарушению ее работоспособности или нарушению правильности функционирования на всех либо отдельных режимах, а может и не приводить ни к каким проявлениям (например, при резервировании отказавшего элемента). Таким образом, под задачей локализации неконтролируемых отказов понимается поиск мест и возможных причин отказов по их внешним наблюдаемым проявлениям.
В настоящее время большинство способов поиска места отказов в технических объектах основано на использовании в качестве диагностических моделей так называемых логических или булевых моделей [Машиностроение. Энциклопедия. Т. III-7. Измерения, контроль, диагностика / Под общ. ред. В.В. Клюева. - М.: Машиностроение, 1996], [Основы технической диагностики. Кн. 1. Модели объектов, методы и алгоритмы диагноза / Под ред. П.П. Пархоменко. - М.: Энергия, 1976], [Колодежный Л.П., Чернодаров А.В. Надежность и техническая диагностика: учебник для слушателей и курсантов ВУЗов ВВС. - М.: Изд. ВВА им. Проф. Н.Е. Жуковского и Ю.А. Гагарина, 2010].
Процесс формального описания возможных в технической системе отказов и их последствий опирается на опыт, накопленный в каждой конкретной области техники, например, авиации, и регламентируется соответствующими документами [Руководство Р4754 по процессам сертификации высокоинтегрированных сложных бортовых систем воздушных судов гражданской авиации (на базе документов SAE/ARP4754 и EUROCAE/ED-79), 2007; Руководство Р4761 по методам оценки безопасности систем и бортового оборудования самолетов гражданской авиации, 2010].
К числу логических методов описания моделей распространения и процессов распознания отказов относятся и методы теории графов [Оре О. Графы и их применения. - М .: Мир, 1965; Берж К. Теория графов и ее применение. - М.: ИЛ, 1962].
Наиболее близким к заявленному устройству и способу его функционирования является устройство функционального диагностирования (УД), [Основы технической диагностики. Кн. 1. Модели объектов, методы и алгоритмы диагноза / Под ред. П.П. Пархоменко. - М.: Энергия, 1976. С. 38].
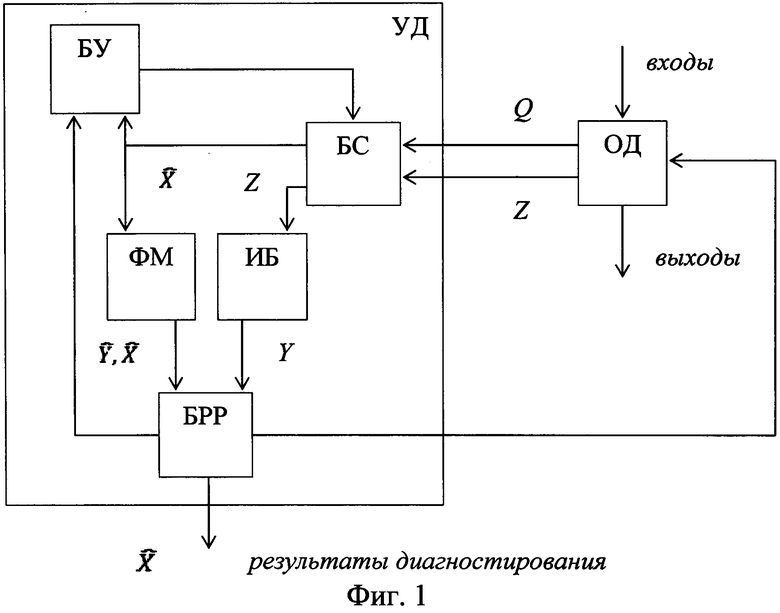
Объект диагностирования (ОД) представляет собой взаимосвязанную совокупность частей (систем, подсистем, блоков, устройств, модулей, элементов), далее называемых обобщенно элементами. При диагностировании ставится задача локализации отказа, т.е. указание отказавшего элемента. ОД функционирует под воздействием поступающих на него входных сигналов и формирует выходные сигналы, которые могут быть доступны или не доступны для непосредственного измерения. Объект диагностирования связан с устройством диагностирования (УД) через входящий в его состав блок связи (БС).
Техническое состояние ОД выражается вектором X, называемым вектором технического состояния ОД и содержащим n компонент в виде переменных величин


Блок связи (БС) под воздействием блока управления (БУ) генерирует связи измерительного блока (ИБ) с непосредственно контролируемыми параметрами ОД, содержащими как явную информацию Q о режиме функционирования ОД, так и неявную информацию Z о техническом состоянии его элементов. Информация о режиме работы ОД передается в УД для выполнения соответствующих настроек его блоков. Входные и выходные сигналы ОД могут непосредственно входить или не входить в параметры Q и Z. При этом необязательно, чтобы все элементы ОД были доступны для непосредственного контроля ИБ. Измерительный блок ИБ является устройством функционального контроля и на основе заложенных в него методов (например, методов допускового контроля) определяет работоспособность или неработоспособность некоторых (принципиально не всех) элементов ОД или их объединений. На выходе ИБ формируется вектор проявлений отказов Y. Кроме этого, БС генерирует оценку  вектора технического состояния X. УД содержит формализованную модель (ФМ) объекта диагностирования ОД, которая по оценке вектора технического состояния формирует оценку
вектора технического состояния X. УД содержит формализованную модель (ФМ) объекта диагностирования ОД, которая по оценке вектора технического состояния формирует оценку  вектора проявлений отказов. При правильном задании оценки , т.е. при условии (1), что является целью поиска отказов, векторы измеренного и вычисленного проявлений отказов ОД должны совпадать:
вектора проявлений отказов. При правильном задании оценки , т.е. при условии (1), что является целью поиска отказов, векторы измеренного и вычисленного проявлений отказов ОД должны совпадать:

Это контролируется блоком расшифровки результатов (БРР), который при выполнении указанного тождества формирует результаты диагностирования. В противном случае БРР передает команду БУ на корректировку оценки
Для поиска места отказа для известных из уровня техники УД используют прямую логическую модель (ПЛМ), описывающую зависимость проявления отказов (распространение влияния и наблюдаемые отклонения от нормального функционирования) от места и характера отказов в системе. В этом случае устройство диагностирования содержит: блок управления БУ, измерительный блок ИБ, прямую логическую модель ПЛМ, блок расшифровки результатов БРР.
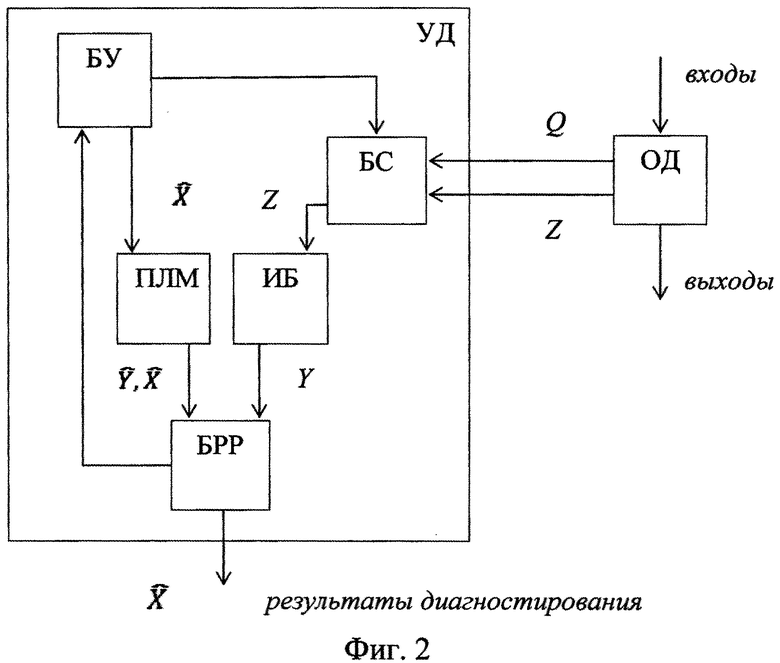
Кроме того, используют обратную логическую модель (ОЛМ), описывающую зависимость возможных отказов (их место в системе и характер) от проявления отказов. При использовании ОЛМ объем вычислений существенно сокращается. При использовании ОЛМ УД содержит: блок управления БУ, блок связи БС, измерительный блок ИБ, блок расшифровки результатов БРР и ОЛМ. Обычно ПЛМ и ОЛМ используются в различных функциональных схемах по отдельности.
Для формального описания работы логических моделей и других блоков используются логические операторы И, ИЛИ, НЕ.
Известные способы и устройства имеют существенные ограничения:
1) Использование для локализации отказов УД на основе ПЛМ приводит к большому объему вычислительных затрат, в то время как использование устройства диагностирования на основе ОЛМ не позволяет сформулировать корректное решение из-за неоднозначности получаемых результатов.
2) Часто для простоты реализации УД вводят допущение о маловероятности одновременного отказа двух и более элементов. В этом случае количество переборов в УД на основе ПЛМ уменьшается до n (где n - размерность вектора X, т.е. количество элементов ОД, техническое состояние которых требуется определить). Такое же допущение может применяться при построении УД на основе обратной логической модели. Однако в этом случае при одновременном возникновении двух и более отказов УД может неверно определять отказавшие элементы.
Вместе с тем опыт показывает, что множественные отказы в технических системах не являются редкими, и из-за практической невозможности оперативного устранения того или иного отказа приходится иметь дело с накоплением в технической системе как однородных, так и разнородных отказов.
3) Общий недостаток существующих способов диагностирования связан с ограниченностью используемой ими булевой алгебры, которая на каждом шагу вычислений вынуждает относить рассматриваемые элементы объекта диагностирования ОД только либо к исправным, либо к неисправным.
Раскрытие изобретения
В основу настоящего изобретения поставлена задача улучшения технико-эксплуатационных характеристик.
Технический результат, который получен при осуществлении изобретения, - повышение оперативности, глубины и достоверности диагностирования технического состояния объектов высокой сложности.
Для решения поставленной задачи с достижением указанного технического результата предложен циклический способ локализации неконтролируемых множественных отказов технических в процессе их функционировании, заключающийся в том, что принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов с булевыми элементами, из вектора проявлений отказов на основе канонизации матрицы выходов формируют вектор начальных оценок технического состояния элементов объекта диагностирования с триплексными значениями «работоспособен», «не работоспособен», «состояние не определено». Затем с помощью триплексной логической модели обратной зависимости, использующей триплексную логическую матрицу обратной зависимости, циклически уточняют вектор оценок технического состояния элементов объекта диагностирования до тех пор, пока его оценки не перестанут изменяться либо пока не будет выполнено заданное число тактов. После этого уточняют значения элементов вектора оценок технического состояния со значением «состояние не определено», для этого поочередно задают все комбинации этих элементов со значениями «работоспособен» и «не работоспособен» и применяют циклическое уточнение оценок элементов на основе построчного использования триплексной логической модели прямой зависимости, использующей логическую матрицу прямой зависимости, распространения отказов с длительностью каждого цикла, определяемой числом шагов, равным размерности вектора технического состояния элементов объекта диагностирования, после этого выдают окончательное значение вектора оценок технического состояния элементов объекта диагностирования.
Элементы вектора оценок технического состояния имеют триплексные значения:
0 - соответствующий элемент объекта диагностирования определенно работоспособен,
1 - соответствующий элемент объекта диагностирования определенно неработоспособен,
* - о работоспособности соответствующего элемента объекта диагностирования нельзя сделать однозначное заключение.
Для решения поставленной задачи с достижением указанного технического результата предложено устройство циклической локализации неконтролируемых множественных отказов технических систем, содержащее блок связи, два входа которого служат для подсоединения к двум выходам данных объекта диагностики соответственно, измерительный блок, блок формирования начальной оценки, блок коммутации, блок решения на основе триплексной логической модели прямой зависимости, использующей логическую матрицу прямой зависимости, блок решения на основе триплексной логической модели обратной зависимости, использующей логическую матрицу обратной зависимости, блок расшифровки результатов и блок управления, выход блока связи подсоединен к входу измерительного блока, а его выход - к входу блока формирования начальной оценки, первый выход блока формирования начальной оценки подсоединен к первому входу блока коммутации, а его второй выход - ко второму входу блока коммутации, первый выход блока коммутации подсоединен к входу блока решения на основе триплексной логической модели обратной зависимости, использующей логическую матрицу обратной зависимости, а его второй выход - к входу блока решения на основе триплексной логической модели прямой зависимости, использующей логическую матрицу прямой зависимости, выход блока решения на основе триплексной логической модели обратной зависимости подсоединен к третьему входу блока коммутации, а выход блока решения на основе триплексной логической модели прямой зависимости к четвертому входу блока коммутации, третий выход блока коммутации подсоединен к входу блока расшифровки результатов, первый выход которого подсоединен к входу блока управления, а второй выход служит для отображения данных результатов диагностирования, выход блока управления подсоединен к управляющему входу блока связи.
Возможен дополнительный вариант выполнения устройства, в котором целесообразно, чтобы блок расшифровки результатов был снабжен третьим выходом, который служит для подсоединения к управляющему входу объекта диагностирования.
Основным существенным отличием изобретения по сравнению с аналогами является поочередное использование обратной и прямой логических моделей, описываемых с помощью логических матриц прямой и обратной зависимостей распространения отказов. Использование обратной логической модели позволяет существенно сократить вычислительные или аппаратные затраты, а использование прямой логической модели - преодолеть неоднозначность получаемых результатов.
Новые возможности для диагностирования, используемые в изобретении, открываются при переходе к триплексным переменным, позволяющим разделить все элементы объекта диагностирования ОД на три категории: работоспособные, неработоспособные и такие, в отношении работоспособности которых вообще или пока невозможно сформулировать однозначное утверждение. Использование триплексного описания технического состояния объекта диагностирования ОД составляет другое существенное отличие предлагаемого изобретения от аналогов.
За основу берется известный способ локализации неконтролируемых отказов технических объектов, который заключается в том, что сначала определяют состояние доступных для непосредственного контроля элементов объекта диагностирования путем обработки сигналов этих элементов. Затем на основе информации о состоянии непосредственно контролируемых частей и о внутренних связях объекта диагностирования определяют состояние остальных, т.е. непосредственно неконтролируемых элементов объекта диагностирования. В настоящем изобретении вместо переменных булевой алгебры для формального описания технического состояния всех элементов объекта диагностирования используют триплексные переменные со значениями «работоспособен», «не работоспособен», «состояние не определено». На основе информации о работоспособности непосредственно контролируемых элементов формируют начальные оценки технического состояния всех элементов объекта диагностирования. Затем для уточнения оценок технического состояния элементов объекта диагностирования, принимающих значение «состояние не определено», используют циклические процессы, в которых чередуют использование прямой и обратной логических триплексных моделей объекта диагностирования. При этом результаты диагностирования формируют и выдают в терминах указанных триплексных переменных. Кроме того, в качестве правила окончания циклических процессов уточнения оценок технического состояния элементов объекта диагностирования используют либо исчерпание заданного числа циклов, либо прекращение изменения циклически уточняемых оценок.
Указанные преимущества изобретения, а так же его особенности поясняются с помощью лучшего варианта его осуществления со ссылками на прилагаемые чертежи.
Краткий перечень чертежей
Фиг. 1 изображает функциональную схему устройства диагностирования (УД) ближайшего аналога;
Фиг. 2 - то же, что фиг. 1, УД на основе прямой логической модели;
Фиг. 3 - то же, что фиг. 1, УД на основе обратной логической модели;
Фиг. 4 - функциональную схему устройства локализации неконтролируемых множественных отказов технических систем (УЛО) согласно настоящему изобретению;
Фиг. 5 - смешанный направленный граф методического примера.
Лучший вариант осуществления изобретения
Поскольку способ реализуется при помощи работы устройства (фиг. 4), то полное его описание приведено в разделе пояснения работы этого устройства.
Устройство (фиг. 4) локализации неконтролируемых множественных отказов технических систем (УЛО) содержит блок 1 связи (БС), два входа которого служат для подсоединения к двум выходам данных объекта 2 диагностирования (ОД). Устройство также содержит измерительный блок 3 (ИБ), блок 4 формирования начальной оценки (БФНО), блок 5 коммутации (К), блок 6 решения на основе триплексной логической модели обратной зависимости (БРМОЗ), блок 7 решения на основе триплексной логической модели прямой зависимости (БРМПЗ), блок 8 расшифровки результатов (БРР) и блок 9 управления (БУ). Выход блока связи подсоединен к входу ИБ 3, а выход ИБ 3 - к входу блока 4 формирования начальной оценки. Первый выход БФНО 4 подсоединен к первому входу К 5, а его второй выход - к второму входу К 5. Первый выход К5 подсоединен к входу БРМОЗ 6, а его второй выход - к входу БРМПЗ 7. Выход БРМОЗ 6 подсоединен к третьему входу блока 5 коммутации, а выход БРМПЗ 4 к четвертому входу К 5. Третий выход К 5 подсоединен к входу БРР 8, первый выход которого подсоединен к входу БУ 9, а второй выход служит для отображения данных результатов диагностирования. Выход БУ 9 подсоединен к управляющему входу блока 1 связи.
Кроме того, БРР 8 может быть снабжен третьим выходом, который служит для подсоединения к управляющему входу ОД 2.
Работает устройство (фиг. 4) следующим образом.
На входы БС 1 УЛО, из ОД 2 подаются сигналы Q, содержащие явную информацию о режиме функционирования ОД 2, и сигналы Z, содержащие неявную информацию о техническом состоянии элементов ОД 2. Процесс диагностирования носит циклический характер. Каждый цикл начинается с того, что БС 1 в соответствии с командами, поступающими из БУ 9, и сигналами Q передает выборочно сигналы Z в ИБ 3, который в свою очередь преобразует их в сигналы, соответствующие вектору проявлений отказов Y в текущем цикле, и передает их в БФНО 4. В этом блоке 4 формируются сигналы, соответствующие начальному значению оценки вектора технического состояния объекта диагностирования. Из БФНО 4 сигналы передаются в блок 5 коммутации, который анализирует результаты работы БРМОЗ 6 и БРМПЗ 7 (для этого предусмотрены обратные связи выходов от БРМОЗ 6 и БРМПЗ 7 на третий и четвертый вход К 5). В зависимости от результата анализа К 5 подсоединяет одну из этих моделей и подает на ее вход сигналы, соответствующие текущему значению оценки технического состояния ОД 2 (здесь k - номер текущего такта цикла диагностирования), или же подает на БРР 8 сигналы, соответствующие окончательной оценке  технического состояния ОД 2. С третьего выхода БРР 8 в ОД 2 могут поступать сигналы для осуществления реконфигурации ОД 2, если это предусмотрено решаемой задачей.
технического состояния ОД 2. С третьего выхода БРР 8 в ОД 2 могут поступать сигналы для осуществления реконфигурации ОД 2, если это предусмотрено решаемой задачей.
Теоретические основы предлагаемого изобретения
Данное изобретение опирается на теорию смешанных направленных графов с двумя логическими операторами OR (ИЛИ) и AND (И), здесь для обозначения операторов используются только прописные буквы.
Граф технического состояния объекта диагностирования формируется известными приемами [Оре О. Графы и их применения. - М .: Мир, 1965; Берж К. Теория графов и ее применение. - М.: ИЛ, 1962] из таблиц анализа отказов конкретной технической системы, полученных, в свою очередь, по принятым в отрасли методикам [Руководство Р4754 по процессам сертификации высокоинтегрированных сложных бортовых систем воздушных судов гражданской авиации (на базе документов SAE/ARP4754 и EUROCAE/ED-79), 2007; Руководство Р4761 по методам оценки безопасности систем и бортового оборудования самолетов гражданской авиации, 2010].
В данном изобретении используются только направленные (переходы между вершинами возможны только в одном указанном стрелкой направлении) смешанные (используются два различных оператора) графы.
Каждая часть объекта диагностирования, рассматриваемая с позиции анализа отказов как самостоятельная, представляет собой подсистему, узел или элемент. На графе каждая такая часть представлена соответствующей вершиной (узлом), а все взаимодействия этих частей отражаются направленными связями (ребрами, стрелками) между вершинами. Из методических соображений обычно граф общего вида (с произвольным числом взаимосвязей) путем декомпозиции (разбиения на связанные части) трансформируется к виду с не более чем двумя входами и двумя выходами). При этом каждая вершина графа имеет свой собственный фиксированный кортеж входной и выходной логики, представленной операторами «ИЛИ» и «И». Оператор «ИЛИ» на входе узла означает, что соответствующая часть системы, отождествляемая с данным узлом, срабатывает (начинает функционировать, принимает информацию и пр.) при наличии сигнала (информации, питания и пр.) хотя бы на одном из входов (входящей стрелке), соответственно «И» - при наличии сигнала (информации, питания и пр.) одновременно на обоих входах. Оператор «ИЛИ» на выходе вершины означает, что по некоторому определенному правилу соответствующая часть системы выдает сигнал (управляющую команду, информацию, питание и пр.) на одну из связанных с ним вершин по выходящей стрелке, соответственно «И» - на обе вершины одновременно. При этом какие-то вершины такого графа могут представлять собой элементы с возможными отказами, какие-то - внутренние процессы, а какие-то - проявления этих отказов. Каждая вершина графа рассматривается как нечто целое и неделимое. Некоторые вершины могут быть неполными в смысле количества входов и выходов. Где вход, а где выход системы фиксируется только порядковыми номерами вершин.
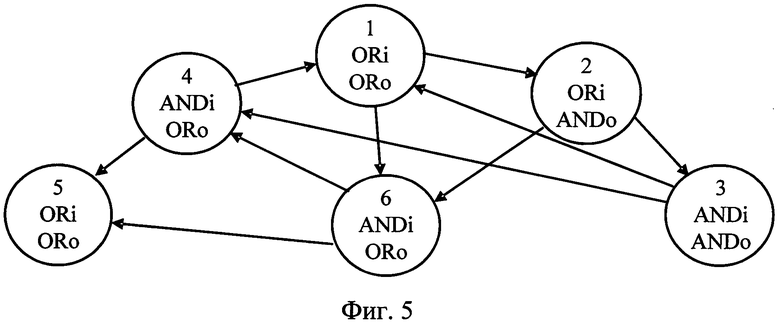
В качестве методического примера на фиг. 5 показан направленный смешанный граф для гипотетического ОД 2 с шестью вершинами. В каждом конкретном случае такой граф для объекта 2 диагностирования формируется экспертами по результатам анализа его структуры и потоков информации (энергопитания, команд, рефлексов и пр.) или располагаемых его математических моделей. Введенные на фиг. 5 символы имеют следующие наименования:
ORi - оператор «ИЛИ» на входе элемента;
ANDi - оператор «И» на входе элемента;
ORo - оператор «ИЛИ» на выходе элемента, этот оператор сопровождается указанием правила выбора выхода элемента, на котором формируется выходной сигнал (по расписанию, в зависимости от режима использования ОД, в функции от каких-либо внешних или внутренних параметров и пр.);
ANDo - оператор «И» на выходе элемента.
Так, на фиг. 5 элемент под номером 1 имеет два входа (две входящие стрелки) от элементов 3 и 4 с оператором ORi. Это означает, что данный элемент объекта 2 диагностирования приводится в действие (срабатывает, осуществляет предписанную функцию) при наличии сигнала (информации, питания и пр.) хотя бы на одном из двух указанных входов. Этот же элемент имеет два выхода (две выходящие стрелки) в сторону элементов 2 и 6 с оператором ORo. Это означает, что в результате действия элемента 1 на один из элементов 2 или 6 в зависимости от некоторого известного правила передается сигнал (информация, питание и пр.). По аналогии элемент 6 приводится в действие одновременным наличием сигналов от элементов 1 и 2 (оператор ANDi), а в результате своего функционирования он передает сигналы элементу 4 или 5 (оператор ORo). Элементы 2, 3 и 5 на фиг. 5 являются неполными.
В данном примере вершины 1 и 3 - элементы системы, которые могут содержать отказы, а вершины 1 и 5 - элементы системы, на которых проявляются (могут быть обнаружены, зафиксированы) эти отказы, соответственно вершины 2, 4 и 6 - некоторые внутренние элементы, не относящиеся ни к тому, ни к другому типу, а обеспечивающие представление логики исследуемых процессов.
Следует обратить внимание на то, что в заявленном техническом решении значимость придается двум противоположно направленным процессам: это, во-первых, определение последствий или проявлений, к которым могут привести отказы системы, и, во-вторых, локализация отказов, т.е. поиск причины неправильного функционирования системы. Эти процессы обеспечиваются прямой и обратной логиками соответственно.
Процесс распространения влияния отказа в объекте диагностирования ОД 2 с триплексным описанием происходит в соответствии с правилами логики прямого анализа такого процесса, представленными в таблице 1. Этот процесс соответствует распространению влияния отказов (неправильного функционирования) от места зарождения к другим частям и системам вплоть до их проявления.

Здесь и далее «0» обозначает отсутствие отказа, «1» обозначает наличие отказа, его проявление или влияние, «∗» обозначает неопределенное состояние, строчные буквы «i» и «o» используются для обозначения операторов, относящихся ко входу и выходу элементов ОД 2, соответственно.
Заметим, в двух последних строках таблицы 1 отсутствуют (зачеркнуты) некоторые комбинации, т.е. соответствующие формулы не существуют по определению, а указанные комбинации противоречат определению соответствующего оператора «ИЛИ» или «И». Такие комбинации не представляют интереса при анализе распространения влияния отказов (прямая логика), но используются при формировании логики обратного анализа.
Логика обратного анализа соответствует тому, что могло бы быть на входе элемента при известном его выходе. Это соответствует направлению процесса локализации (поиска) отказа, начиная от его проявления. Результаты обращения формул, приведенных в таблице 1, представлены в таблице 2, здесь дополнительно строчной буквой «r» обозначены операторы, полученные после обращения (reverse).
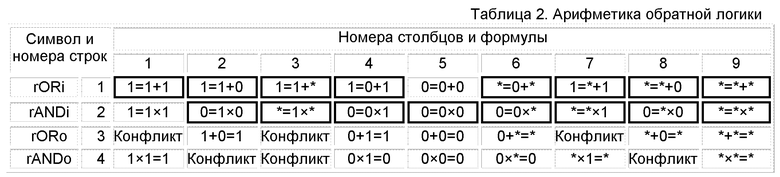
В таблице 2 жирными рамками выделены ячейки, порождающие размножение вариантов. Каждый раз при возникновении такой ситуации происходит ветвление явно здесь не вычисляемого «дерева отказов». Так, при анализе в обратном направлении (обращение) можно утверждать, что наличие единицы на выходе логического оператора OR может быть соотнесено с наличием единиц на обоих его входах или одной единицы на любом из них.
Отсутствие некоторых формул в таблице 1 приводит к тому, что в соответствующих ячейках таблицы 2 возникают конфликтные (или противоречивые) ситуации. Эти ячейки содержат слово «конфликт». Возникновение конфликтов свидетельствует о том, что анализируемая цепочка событий (переход от состояния к состоянию по тактам обратного анализа) некорректна в смысле логических моделей прямой и обратной зависимостей. Поэтому такая цепочка событий исключается из дальнейшего анализа.
Моделирование отказов
В настоящем изобретении предполагается, что для любого реального объекта диагностирования 2, на основе результатов его анализа, может быть составлен направленный смешанный граф развития и проявления отказов этого ОД 2. Отказ может быть кратковременным (сбой) или постоянным (продолжительным). Одни элементы в ОД могут отказать непосредственно, а отказ других может являться лишь следствием отказа первых.
Для упрощения формализации решений используется табличная запись. Общие правила перехода от направленных смешанных графов к табличной записи сводятся к следующему.
Введены обозначения: 

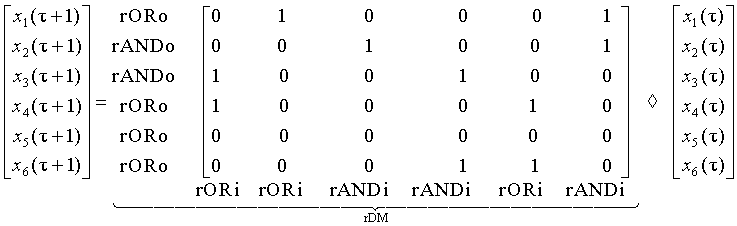
Далее формируется формула переходов состояния

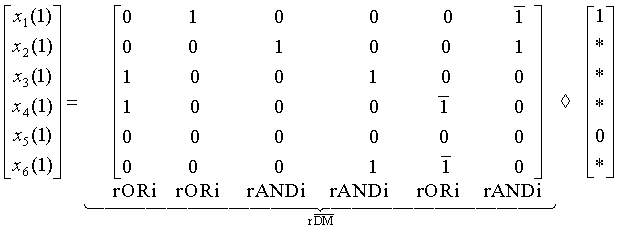
в левой части которой в форме вектора с n (по числу вершин графа) компонентами записывается вектор состояния ОД 




Ячейки матрицы DM размера 
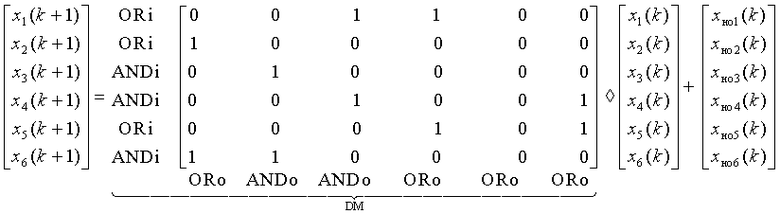
Модель вида (3) является прямой логической триплексной моделью (ПЛТМ). Компактная запись (3) напоминает матричную запись, но не является ею в том смысле, что отмеченная знаком ◊ композиция не является операцией матричной алгебры. Принципиальная особенность DM, как и смешанного графа (в данном случае показанного на фиг. 5), заключается в закреплении за строками и столбцами конкретных логических операторов.
В качестве примера представим модель (3) для смешанного направленного графа на фиг. 5. В соответствии с описанным правилом графу на фиг. 5 эквивалентна формула
Общие правила выполнения композиции в модели типа (3), содержащей DM, таковы.
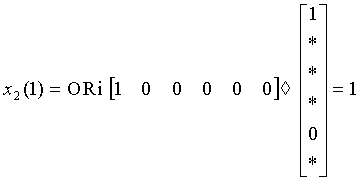
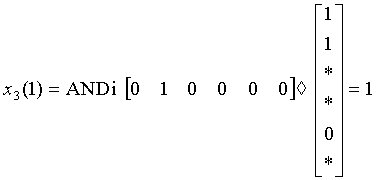
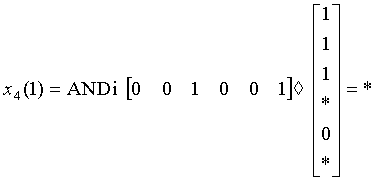
Значение каждой j-й компоненты 

1. Компоненты
Так, в первой строке формулы (4) иллюстративного примера это относится к компонентам 



2. Компоненты, расположение которых соответствует единицам в строке DM, используются в композиции следующим образом:
- если единица в матрице DM, соответствующая компоненте
- если единица в матрице DM, соответствующая компоненте 
- в качестве оператора композиции используется оператор, соответствующий данной строке DM (указан слева матрицы).
В методическом примере для первой строки формулы (4) приведенное правило дает результаты:
а) в случае использования выхода элемента 4 в сторону элемента 1:

б) в противном случае:

Если, например, на некотором k-м такте вектор 
а) в случае использования выхода элемента 4 в сторону элемента 1:
в таблице 1 на пересечении 1-й строки и 7-го столбца размешена формула *+1=1, следовательно, результат композиции имеет значение 1, т.е. первый элемент ОД подвергнется влиянию отказа;
б) в противном случае:
в таблице 1 на пересечении 1-й строки и 8-го столбца размешена формула *+0=*, следовательно, результат композиции будет неопределенным.
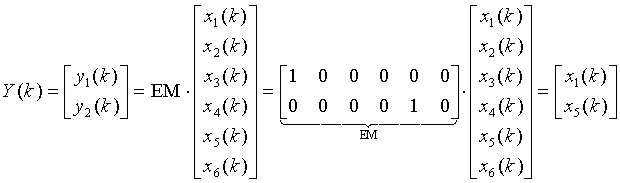
Помимо логической матрицы прямой зависимости DM вводится еще одна бинарная матрица, которая является матрицей выходов EM (Exit Matrix) и используется в соответствии с правилами алгебры матриц. Использование этой матрицы позволяет выделить из всех элементов объекта диагностирования ОД 2 только те элементы (или в общем случае их комбинации), которые соответствуют наблюдаемым проявлениям отказов

Здесь и далее Y(k) - вектор проявлений отказов с m компонентами, 
Данную матрицу реализует измерительный блок 3 (фиг. 4). Здесь y l(k) - l-я компонента вектора проявлений отказов Y на k-м такте цикла диагностирования, общее число компонент вектора Y равно m.
Пусть для модели (4) выходом являются 1-й и 5-й элемент вектора состояния. Тогда для рассматриваемого методического примера матрица выходов определяется равенствами
Итак, уравнение (3) описывает обобщенное развитие влияния отказов от вершины к вершине (от элемента к элементу ОД 2), уравнение (5) - проявление отказов (на некоторых элементах ОД 2, что соответствует физической природе ОД 2).
Конкретная модель ОД адекватна процессу развития отказов в реальной системе, что опирается на формализованные описания систем, мнение экспертов и результаты полунатурных экспериментов. После подтверждения достоверности модели переходят к локализации отказов.
Локализация (поиск) отказов
В данном техническом решении априорно полагается, что отказы могут быть как простые (одиночные), так и сложные (множественные). Единственное вводимое здесь ограничение связано с тем, что отказы не изменяются за время одного полного цикла процесса их локализации.
Процедура обратных преобразований введенной выше модели, представленной уравнениями (3) и (5), состоит из нескольких этапов.
Предполагается, что измерительный блок ИБ 3 правильно определяет вектор наблюдаемых проявлений отказов Y(0) в момент времени 0, соответствующий началу очередного цикла локализации.
Этап № 1.
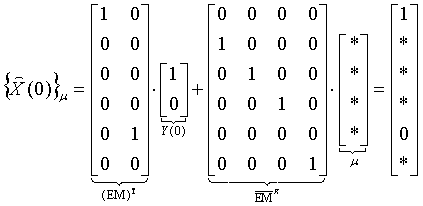
По вектору наблюдаемых проявлений отказов Y(0)
формируется оценка 


Такая процедура определяет все множество решений уравнения (5), записанного для момента начала очередного цикла локализации отказа, т.е.


относительно вектора 
В общем случае решение уравнения (7) определяется формулой [Буков В.Н. Вложение систем. Аналитический подход к анализу и синтезу матричных систем. - Калуга: Изд-во науч. литературы Н.Ф. Бочкаревой, 2006]

где фигурными скобками обозначено множество неразличимых решений, порождаемое варьированием вектора µ с произвольными элементами. В формуле (8) µ - вектор, число компонент которого равно
 - канонизатор матрицы EM, т.е. такая матрица, при которой выполняется тождество
- канонизатор матрицы EM, т.е. такая матрица, при которой выполняется тождество 
 - правый делитель нуля матрицы EM максимального ранга, т.е. такая матрица размера
- правый делитель нуля матрицы EM максимального ранга, т.е. такая матрица размера 
Канонизатор  в рассматриваемых задачах (все элементы матрицы EM представлены только нулями и единицами, а сама матрица имеет максимальный строчечный ранг) равен транспонированному значению исходной матрицы:
в рассматриваемых задачах (все элементы матрицы EM представлены только нулями и единицами, а сама матрица имеет максимальный строчечный ранг) равен транспонированному значению исходной матрицы: 

а все компоненты вектора µ представлены звездочками ∗ (неопределенность состояния). Все операции в (9) выполняются по известным правилам матричной алгебры с учетом формул таблицы 1 (строки 1 и 2, столбцы с 1 по 6 включительно).
Этап № 2. На основе известной матрицы DM, а точнее, ее инверсии rDM (reverse Dependency Matrix), в обратной последовательности распространения влияния отказов уточняются компоненты вектора X, помеченные «∗», т.е. однозначно неопределенные, по формуле

Инверсия матрицы DM осуществляется ее транспонированием (взаимной заменой элементов строк и столбцов, включая совокупности логических операторов, т.е. перечень операторов строк переходит в перечень операторов столбцов и наоборот) и заменой исходных операторов их инверсиями (вместо логики прямого анализа по таблице 1 используется логика обратного анализа по таблице 2).
Модель вида (10) является обратной логической триплексной моделью (ОЛТМ), а таблица коэффициентов rDM - логическая матрица обратной зависимости распространения отказов. Компактная запись (10), как и (3), напоминает матричное равенство, но, как и (3), не является ею в том смысле, что к ней не применимы известные правила матричной алгебры.
Правила работы с rDM аналогичны описанным выше правилам с учетом двух обстоятельств:
1. Теперь варианты решений порождают операторы rORi и rANDi (там, где две единицы в столбце) в соответствии с таблицей 2. Это альтернативные варианты (гипотезы) предыстории развития отказов, подлежащие дальнейшему анализу. После каждого прохождения такого оператора требуется утраивать число анализируемых вариантов, поскольку число возможных значений переменных равно трем (0, 1, ∗).
2. При вычислении значений возможны указанные на таблице 2 конфликты, относящиеся к разным строкам. Тогда соответствующие гипотезы о предыстории развития отказов снимаются.
Здесь первое обстоятельство определяет правило ветвления «дерева отказов», а второе исключает неперспективные (противоречащие логике объекта 2 диагностирования) ветви.
Обобщенно итерационную процедуру локализации отказов с выполнением обратных шагов можно записать формулой

Число тактов τ цикла выбирается из условия либо прекращения деформации (изменения) оценки вектора состояний 
Непосредственное использование логической модели обратной зависимости распространения отказов в отношении элементов со значением * («состояние не определено») может приводить к размножению неопределенности. Поэтому при локализации отказов при возникновении ситуации размножения неопределенности применяется логическая модель прямой зависимости. В изобретении циклически по тактам и циклически по компонентам уточняется вектор оценок технического состояния элементов объекта диагностирования с использованием столбцов логической матрицы обратной зависимости, соответствующих элементам со значением «работоспособен» и «не работоспособен», и с использованием строк логической матрицы прямой зависимости, соответствующих элементам со значением «состояние не определено». Возможны различные варианты реализации предлагаемого обобщенного способа. Здесь описан один из таких вариантов.
Учет выходной логики ORo элементов осуществляется следующим образом. Если по принятой системе формирования выходной логики ORo элемент по каким-то выходам вместо единицы (состояние отказа) передает ноль, то соответствующие им единицы в матрицах DM и rDM называются инверсными. Для явного отражения этого факта используется обозначение 



Значение каждой j-й компоненты 

Сначала используется логическая матрица обратной зависимости распространения отказов


А. Организуется внешний цикл, в котором уточняются компоненты вектора
Б. Организуется внутренний цикл поочередного уточнения компонент вектора 
При каждом новом значении τ и j проводится следующий анализ:
1. Если 


2. Если 



3. Если 


4. Если 

После выполнения заданного числа тактов может возникнуть ситуация, что не все компоненты вектора

При этом реализуется следующая логика:
- если соответствующая j-я строка матрицы 


- если соответствующая j-я строка матрицы


- в противном случае значение остается без изменения 
Этап № 3.
На возможные места достоверных отказов указывают получающиеся единичные значения компонент оценки 
Описание методического примера
Пример по шагам (по тактам и компонентам) демонстрирует выполнение описанных выше действий и их результаты применительно к ОД, представленному на фиг. 5. Выходная логика ORo каждого элемента работает следующим образом. При наличии отказа (значение равно единице) он передается в виде единицы элементу с меньшим порядковым номером, а элементу с большим порядковым номером передается ноль. Выходом системы являются элементы 1 и 5. В таком случае матрица EM имеет вид (5). Непосредственные отказы содержат элементы 1 и 3.
Процесс распространения отказов по ОД описывается моделью (3).
Первый такт:

Второй такт:

При последующих тактах изменения состояния элементов не происходит. Таким образом, при отказе 1-го и 3-го элементов отказ распространился на 2-й элемент.
Процесс локализации отказа реализуется следующим образом.
Этап № 1. Формула (9) принимает вид
Таким образом, после первого этапа в ОД остаются неопределенными состояния 2-го, 3-го, 4-го и 6-го элементов.
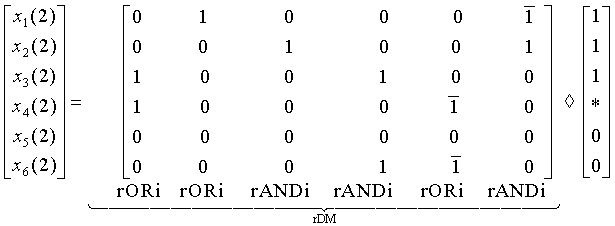
Этап № 2. В соответствии с уравнением (3) рекуррентное соотношение для обратной последовательности распространения отказов имеет вид
где 

где 
Примечание: для сокращения записей здесь сразу уточняются как вектор X(τ+1), так и вектор X(τ). Для сокращения записей для элементов со значениями 0 и 1 будем сразу применять прямую логическую модель, а для неопределенных элементов * - обратную логическую модель.
Внешний цикл, 1-я итерация, τ = 0, использование модели (12) дает:
Внутренний цикл, j = 1, 


Внутренний цикл, j = 2, 
Внутренний цикл, j = 3, 
Внутренний цикл, j = 4, 
Уточнения вектора состояния не происходит.
Внутренний цикл, j = 5, 
Внутренний цикл, j=6, 
В итоге первый такт по τ дает

Внешний цикл, 2-й такт, τ = 1:
Первые три такта внутреннего цикла не приводят к изменению X(2). Их здесь пропускаем.
Внутренний цикл, j = 4, 
При дальнейших итерациях по τ и по j вектор X не изменяется. Поэтому окончательная оценка имеет значение
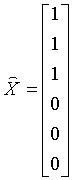
Этап № 3. Полученный результат обосновывает следующее утверждение как результат локализации отказов: у ОД неисправны 1-й, 2-й и 3-й элементы, а исправны 4-й, 5-й и 6-й, элементов с неопределенным состоянием нет.
УЛО связано с объектом 2 диагностирования с помощью блока связи БС 1. Измерительный блок ИБ3 контролирует по заданному методу контроля техническое состояние определенных элементов объекта диагностирования Y в некоторый момент времени, условно здесь называемый начальным, и формирует вектор наблюдаемых проявлений отказов Y(0) для этого момента времени. На основе информации об Y(0) в блоке формирования начальной оценки БФНО 4 формируется начальная оценка вектора состояния  , которая является триплексной. Конкретные позиции возникновения неопределенностей определяются структурой делителей нуля матрицы выходов EM, т.е. априорной информацией о структурных особенностях ОД 2.
, которая является триплексной. Конкретные позиции возникновения неопределенностей определяются структурой делителей нуля матрицы выходов EM, т.е. априорной информацией о структурных особенностях ОД 2.
Устройство работает циклически. После получения информации X(0) от БФНО 4 начинается цикл уточнения неопределенных компонент оценки вектора технического состояния  . Новая информация от БФНО 4 формирователя начальной оценки не принимается, пока не закончатся вычисления данного цикла.
. Новая информация от БФНО 4 формирователя начальной оценки не принимается, пока не закончатся вычисления данного цикла.
В дальнейшем для циклического уточнения значения вектора технического состояния X используется одна из логических триплексных моделей ОТЛМ или ПТЛМ в виде блоков решения на основе логических матриц обратной и прямой зависимостей. Управление подключением моделей и контроль над количеством циклов осуществляется по командам К 5. Результаты диагноза представляются по второму выходу БРР 8.
Использование блока решений на основе логической модели прямой зависимости БРМПЗ 7 происходит лишь в случае, если очередной уточняемый элемент равен ∗, т.е. остается неопределенным. В этом случае использование БРМОЗ 6 не продуктивно - см. таблицу 2: обратный переход от выхода со значением ∗ всегда приводит к неопределенности входов, т.е. размножению неопределенности в системе. При этом БРМПЗ 7 используется не полностью, а только в той его части, которая соответствует уточняемой компоненте, т.е. одна строка соответствующей логической модели. Во всех остальных случаях используется только БРМОЗ 6. Это позволяет существенно сократить объем вычислений.
Условие останова выполняется, если
Технический результат - оперативность в заявленном решении обеспечивается тем, что при всей сложности физических процессов, реально протекающих в ОД 2, способ и устройство локализации отказов оперируют исключительно с логическими переменными, а простота используемых алгебраических правил позволяет вести обработку информации в существенно ускоренном времени. В результате можно достичь получения результатов диагностирования почти в реальном времени.
Глубина обеспечивается использованием (формальным отражением) в применяемых логических триплексных моделях практически всех (всех значимых или всех известных) внутренних связей ОД 2, что позволяет с приемлемой тщательностью учесть реально существующие взаимовлияния его частей, под которыми в зависимости от контекста могут пониматься элементы, модули, блоки, устройства или подсистемы.
Достоверность обеспечивается триплексным описанием технического состояния контролируемых частей объекта диагностирования. В детерминированной постановке (т.е. без учета действия случайных факторов) это позволяет строго разделить все его части на две группы с однозначным определением их работоспособности и одну группу, объединяющую те части объекта диагностирования, для которых объективно невозможно однозначное определение технического состояния.
Возможность обнаружения множественных отказов обеспечивается избирательным чередованием обратной и прямой логических триплексных моделей, позволяющим достичь цель диагностирования без опоры на упрощающее предположение о единственности отказа.
Кроме того, явное указание, получаемое в результате применения предлагаемого изобретения, на наличие и расположение тех частей объекта диагностирования, для которых не может быть сформулировано однозначное суждение о техническом состоянии, предоставляет уникальную возможность для дальнейшего совершенствования объекта диагностирования, в смысле достижения более глубокого его контроля, путем как введения дополнительных точек контроля его частей, так и наращивания внутренних связей (комплексирования) этих частей.
Промышленная применимость
Наиболее успешно заявленные способ локализации неконтролируемых множественных отказов технических систем и устройство для его реализации промышленно применимы в системах функционального диагностирования сложных технических объектов с целью локализации отказов в реальном масштабе времени на фоне естественных сигналов, а также в процессах проектирования сложных технических систем в целом и подсистем их функционального диагностирования в частности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ РАБОТОСПОСОБНОГО СОСТОЯНИЯ АВТОМОБИЛЬНОЙ ТЕХНИКИ | 2020 |
|
RU2746420C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ И ПОИСКА НЕИСПРАВНОСТЕЙ В РАДИОЭЛЕКТРОННОЙ АППАРАТУРЕ | 2004 |
|
RU2309445C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| СПОСОБ ДЕКОДИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОГО КАСКАДНОГО КОДА (ВАРИАНТЫ) | 2006 |
|
RU2340091C2 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ АВАРИИ, ДИАГНОСТИКИ И ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ СЛОЖНОЙ ТЕХНОЛОГИЧЕСКОЙ СТРУКТУРЫ И ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2252453C1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ОБЕСПЕЧЕНИЯ ТЕХНИЧЕСКОЙ ГОТОВНОСТИ СЕТЕЙ СВЯЗИ ПРИ ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2336566C2 |
Изобретение относится к области вычислительной и контрольно-измерительной техники. Техническим результатом является повышение эффективности диагностирования технического состояния объектов высокой сложности. Указанный технический результат достигается тем, что в способе принимают сигналы от объекта диагностирования (ОД), с учетом информации о внутренних связях ОД преобразуют эти сигналы в вектор начальных оценок технического состояния элементов ОД. Затем уточняют оценки технического состояния элементов ОД посредством циклического процесса и использования триплексной логической модели обратной зависимости, использующей логическую матрицу обратной зависимости от проявления отказа к месту его возникновения, и триплексной логической модели прямой зависимости, использующей логическую матрицу прямой зависимости от места возникновения отказа к его проявлению. Формируют оценку вектора технического состояния, которую выдают по завершении процесса оценивания. Компоненты этого вектора характеризуют состояние элементов (устройств, подсистем) ОД значениями «работоспособен», «не работоспособен», «состояние не определено». Устройство содержит блок связи, входы которого служат для подсоединения к выходам данных ОД, измерительный блок, блок формирования начальной оценки, блок коммутации, блок решения на основе триплексной логической модели прямой зависимости, блок решения на основе триплексной логической модели обратной зависимости, блок расшифровки результатов и блок управления. 2 н. и 1 з.п. ф-лы, 5 ил., 2 табл.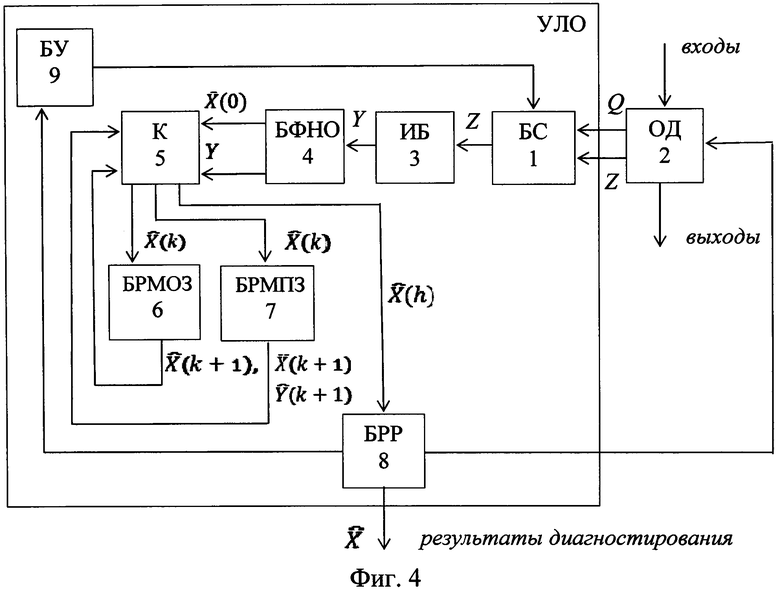
1. Циклический способ локализации неконтролируемых множественных отказов технических систем в процессе их функционирования, заключающийся в том, что принимают сигналы от объекта диагностирования, определяют на их основе вектор проявлений отказов с булевыми элементами, из вектора проявлений отказов с использованием канонизатора матрицы выходов формируют вектор начальных оценок технического состояния элементов объекта диагностирования с триплексными значениями «работоспособен», «не работоспособен», «состояние не определено», с помощью триплексной логической модели обратной зависимости, использующей матрицу обратной зависимости, циклически уточняют вектор оценок технического состояния элементов объекта диагностирования до тех пор, пока его оценки не перестанут изменяться либо пока не будет выполнено заданное число тактов, после этого уточняют значения элементов вектора оценок технического состояния со значением "состояние не определено" на основе использования триплексной логической модели прямой зависимости распространения отказов, использующей логическую матрицу прямой зависимости, после этого выдают окончательное значение вектора оценок технического состояния элементов объекта диагностирования.
2. Устройство циклической локализации неконтролируемых множественных отказов технических систем в процессе их функционирования, содержащее блок связи, два входа которого служат для подсоединения к двум выходам данных объекта диагностики соответственно, измерительный блок, блок формирования начальной оценки, блок коммутации, блок решения на основе триплексной логической модели прямой зависимости, использующей логическую матрицу прямой зависимости, блок решения на основе логической модели обратной зависимости, использующей логическую матрицу обратной зависимости, блок расшифровки результатов и блок управления, выход блока связи подсоединен к входу измерительного блока, а его выход - к входу блока формирования начальной оценки, первый выход блока формирования начальной оценки подсоединен к первому входу блока коммутации, а его второй выход - ко второму входу блока коммутации, первый выход блока коммутации подсоединен к входу блока решения на основе триплексной логической модели обратной зависимости, а его второй выход - к входу блока решения на основе триплексной логической модели прямой зависимости, выход блока решения на основе триплексной логической модели обратной зависимости подсоединен к третьему входу блока коммутации, а выход блока решения на основе триплексной логической модели прямой зависимости к четвертому входу блока коммутации, третий выход блока коммутации подсоединен к входу блока расшифровки результатов, первый выход которого подсоединен к входу блока управления, а второй выход служит для отображения данных результатов диагностирования, выход блока управления подсоединен к управляющему входу блока связи.
3. Устройство по п. 2, отличающееся тем, что блок расшифровки результатов снабжен третьим выходом, который служит для подсоединения к управляющему входу объекта диагностирования.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИАГНОСТИРОВАНИЯ ЦИФРОВЫХ УСТРОЙСТВ | 2009 |
|
RU2430406C2 |
| СПОСОБ ДИАГНОСТИКИ АППАРАТУРЫ | 2004 |
|
RU2265236C1 |
| Устройство для диагностирования технических объектов | 1984 |
|
SU1236428A1 |

