Изобретение относится к области авиационной техники, а именно к системам автоматического управления самолетом в продольной плоскости при возврате на аэродром с большой высоты (в т.ч. > 11 км) и с большой начальной скоростью полета (в т.ч. с числом М>1) при значительном удалении (в т.ч. > 150 км) от взлетно-посадочной полосы (ВПП) в условиях экономии топлива.
Известны способы автоматического управления самолетом при снижении, применимые для выполнения режима «возврат на аэродром», реализованные в системах управления, представленных в патентах RU №2542686 «Система автоматического управления самолетом при снижении», RU №2703378 «Система автоматического управления самолетом при снижении на этапе стабилизации высоты круга». Их использование не предусматривает функционирование с больших удалений от ВПП, с больших начальных высот и скоростей полета. Не предусмотрено в них и решение актуального на практике вопроса экономии топлива.
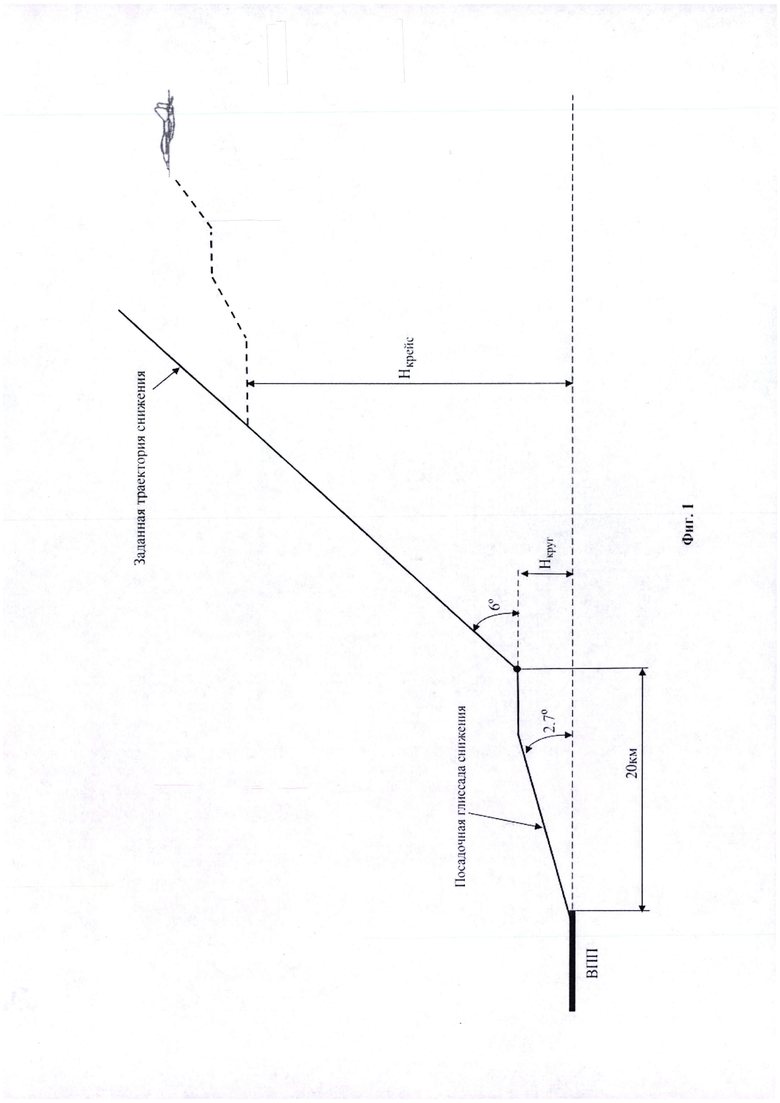
Логика управления самолетом в режиме «возврат на аэродром» направлена на достижение максимальной экономии топлива и заключается в последовательном выполнении трех этапов (фиг. 1).
На первом из них самолет, движущийся на большой высоте и с большой скоростью полета, выводится из начального удаленного от ВПП положения на заданную крейсерскую высоту полета. При этом требуется максимальная экономия топлива при фиксированном режиме работы двигательной установки, характеризующемся минимальным расходом топлива. Необходимо также выдерживать заданную приборную скорость полета (Vпр) и не превышать предельную отрицательную вертикальную скорость (Vy) снижения. Движение самолета происходит с потерей высоты полета до некоторого предварительно заданного значения (до т.н. «крейсерской высоты» Нкрейс) и совершается за один или за несколько проходов. После достижения «крейсерской высоты» выполняется режим стабилизации этой высоты полета до момента пересечения с заданной траекторией снижения.
Второй этап управления заключается в стабилизации положения самолета на заданной траектории снижения, представляющей собой прямую линию с некоторым углом наклона к плоскости горизонта (в частности, равном 6°) и в переходе на заданную высоту круга с последующей ее стабилизацией.
На третьем, заключительном этапе управления осуществляется стабилизация положения самолета на посадочной глиссаде снижения.
Перечисленные этапы выполняются последовательно друг за другом.
На первом этапе выполнения режима «возврат на аэродром» происходит снижение самолета с допустимой вертикальной скоростью 0>Vy>Vy min, где Vy min=- (100÷150) м/с, либо на несколько программно задаваемых эшелонов по высоте Нзад, последним из которых является эшелон крейсерской высоты Hкрейс, либо сразу на крейсерскую высоту полета. При этом необходима максимальная экономия топлива при фиксированном режиме функционирования двигательной установки (в частности, в режиме «малый газ»), требуется также выдерживать заданную приборную скорость полета (Vпр). Значение стабилизируемой скорости выбирается из условий обеспечения максимального аэродинамического качества для обеспечения минимального километрового расхода топлива. В случае, если потребное значение приборной скорости меньше минимально допустимой скорости полета, заданная скорость приравнивается к минимально допустимой. В случае, если минимально-допустимая скорость полета зависит от высоты полета (как правило, с ростом высоты значение минимально-допустимой скорости полета увеличивается), снижение разделяется на несколько участков, при этом в качестве эшелонов заданных высот выбираются высоты, на которых происходит изменение минимально-допустимой скорости полета. Таким образом, самолет проходит по профилю с оптимальной приборной скоростью (с точки зрения километрового расхода топлива) или с минимально-допустимыми скоростями. В результате обеспечивается минимальный расход топлива на выход на крейсерскую высоту полета. После достижения «крейсерской высоты» полета выполняется режим стабилизации этой высоты до момента пересечения с заданной траекторией снижения.
На первом этапе выполнения режима «возврат на аэродром» процесс управления самолетом осуществляется с помощью автоматической системы управления в соответствии с патентом RU №2619793 «Система автоматического управления самолетом при наборе и стабилизации заданной высоты» путем перевода режима ее работы из набора высоты в режим снижения высоты. При сохраненной общей структуре системы управления, представленной в патенте №2619793, отличительными признаками ее использования в режиме снижения являются:
- блок 1 формирования заданной скорости полета Vзад и блок 14 формирования заданной крейсерской высоты полета Нзад имеют возможность программного изменения и, тем самым, заданные значения скорости полета Vзад и высоты эшелонов снижения Hзад могут меняться по заданным программам с целью обеспечения экономичной работы двигательной установки;
- в блоке 21 ограничения сигналов по величине суммарный сигнал заданной вертикальной скорости самолета  ограничивается в области отрицательных значений
ограничивается в области отрицательных значений  , где Vy min=-(100÷450) м/с; за счет этого исключается набор высоты и ограничивается максимальная вертикальная скорость снижение на уровне допустимых значений;
, где Vy min=-(100÷450) м/с; за счет этого исключается набор высоты и ограничивается максимальная вертикальная скорость снижение на уровне допустимых значений;
- блок логики 22 переводит управление самолетом из режима снижения в режим стабилизации крейсерской высоты полета Hкрейс по признаку Н<(Hзад+ΔH), ΔH=(100 ÷ 200)м; за счет этого обеспечивается плавный (без перерегулирования) процесс выхода самолета на крейсерскую высоту Нкрейс с последующей стабилизацией этой высоты полета.
На втором этапе возврата самолета на аэродром осуществляется процесс стабилизации его положения на заданной траектории снижения с помощью автоматической системы управления в соответствии с патентом RU №2703378 «Система автоматического управления самолетом при снижении на этапе стабилизации высоты круга». Система управления включается в работу в момент пересечения траектории полета на крейсерской высоте полета с заданной траекторией снижения. С помощью этой же системы управления выполняется плавный процесс выхода самолета на заданную высоту круга Нкруг (без «провалов» по высоте ниже высоты круга) и последующая стабилизация его положения на этой высоте.
На третьем, заключительном этапе возврата самолета на аэродром осуществляется процесс стабилизации положения самолета на посадочной глиссаде снижения с помощью автоматической системы управления в соответствии с патентом RU №2537201 - «Система автоматического управления самолетом при заходе на посадку».
Сущность изобретения поясняется графическими изображениями:
на фиг. 1 представлена графическая схема последовательно выполняемых этапов управления самолетом в режиме «возврат на аэродром» - т.н. «профиль» полета;
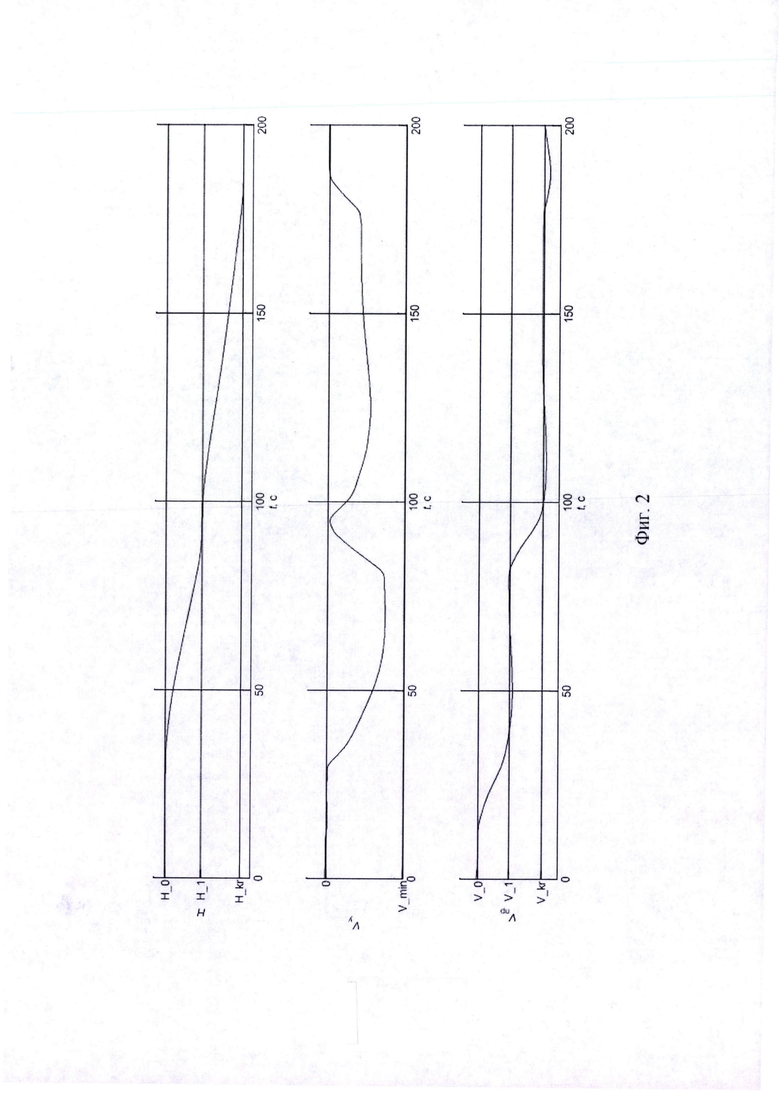
на фиг. 2 представлены графики изменения основных параметров полета (высоты, скорости полета, вертикальной скорости) на первом этапе выполнения режима «возврат на аэродром».
На фиг. 1, 2 использованы следующие обозначения:
ВПП - взлетно-посадочная полоса;
Н - текущая высота полета;
t, с - текущее время;
Нкруг - высота круга;
Нкрейс - крейсерская высота полета;
Н_0 - начальная высота, занятая самолетом перед выполнением режима «возврат на аэродром»;
Н_1 - первое (промежуточное) значение заданной высоты;
Hkr - второе (конечное) значение заданной высоты (крейсерская высота);
Vy - вертикальная скорость снижения самолета;
Vmin - предельно допустимое отрицательное значение вертикальной скорости;
Vпр - приборная скорость полета самолета;
V_0 - начальная скорость перед выполнением режима «возврат на аэродром»;
V_1 - расчетная скорость полета, соответствующая экономичному расходу топлива двигательной установки при переходе на первое (промежуточное) значение заданной высоты;
V_kr - расчетная скорость полета, соответствующая экономичному расходу топлива двигательной установки при переходе на крейсерскую высоту полета.
В рассмотренном примере процесс управления самолетом на первом этапе выполнения режима «возврат на аэродром» состоит из двух фрагментов: снижение самолета с начальной высоты Н_0 до промежуточной заданной высоты Н_1 с последующим переходом на заданную крейсерскую высоту полета Нkr.
Из представленных на фиг.2 материалов следует, что:
- процесс снижения самолета до промежуточной заданной высоты Н_1 и далее до крейсерской высоты полета Hkr осуществляется соответственно со скоростями полета V_1 и V_kr, определенными из условий экономичного расхода топлива двигательной установки на этих высотах; скорости полета V_1 и V_kr после окончания переходных процессов поддерживаются постоянными на расчетных значениях;
- вертикальная скорость полета Vy не превышает максимально допустимых отрицательных значений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ | 2014 |
|
RU2542686C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2494932C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 1993 |
|
RU2061624C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
Изобретение относится к способу управления самолетом при возврате на аэродром с большой высоты, с большой начальной скоростью полета и с больших удалений от ВПП в условиях экономии топлива. Для этого используют проводимые последовательно автоматизированные процессы стабилизации положений самолета на заданной траектории снижения, при переходе на высоту круга с последующей стабилизацией на этой высоте, стабилизации положения самолета на посадочной глиссаде. Одновременно при снижении самолета используют процессы стабилизации заданной скорости полета с ограничением вертикальной скорости, а двигательная установка переводится на фиксированный режим работы, характеризующийся минимальным расходом топлива. Обеспечивается функционирование с больших удалений от ВПП, с больших начальных высот и скоростей полета, а также снижение расхода топлива. 1 з.п. ф-лы, 2 ил.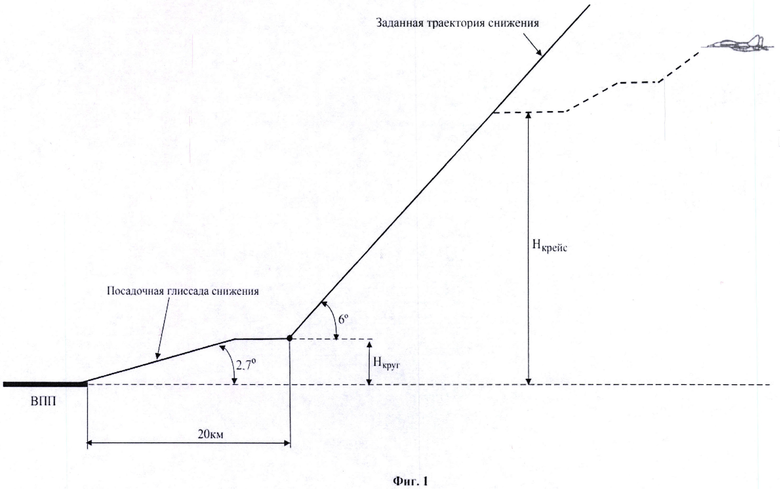
1. Способ управления самолетом при возврате на аэродром с большой высоты, в т.ч. > 11 км, с большой начальной скоростью, в т.ч. с числом М>1, с больших удалений от ВПП, в т.ч. > 150 км, в условиях экономии топлива, заключающийся в использовании автоматизированных процессов стабилизации положения самолета на заданной траектории снижения, перехода самолета на высоту круга с последующей стабилизацией его положения на этой высоте и стабилизации положения самолета на посадочной глиссаде снижения, предусматривающий использование информационно-навигационной системы, формирующей высотно-скоростные параметры, заданную траекторию снижения, посадочную глиссаду снижения, сигналы заданной, крейсерской и текущей высоты полета, сигнал высоты круга, сигнал отклонения от заданной траектории снижения, сигнал отклонения от посадочной глиссады снижения, сигналы продольной и вертикальной перегрузок, сигналы скорости полета и вертикальной скорости, автоматической системы стабилизации положения самолета на заданной траектории снижения, автоматической системы стабилизации положения самолета на высоте круга и автоматической системы стабилизации положения самолета на посадочной глиссаде снижения, при этом дополнительно используется автоматизированный процесс снижения самолета с текущей высоты полета до крейсерской высоты с одновременной стабилизацией заданной скорости полета, с ограничением вертикальной скорости и с последующей стабилизацией положения самолета на крейсерской высоте полета, а двигательная установка переводится на фиксированный режим работы, характеризующийся минимальным расхода топлива.
2. Способ управления самолетом при возврате на аэродром по п. 1, отличающийся тем, что автоматизированные процессы управления снижением самолета до крейсерской высоты полета, стабилизации положения самолета на крейсерской высоте полета, стабилизации положения самолета на заданной траектории снижения, перехода самолета на высоту круга с последующей стабилизацией его положения на этой высоте и стабилизации положения самолета на посадочной глиссаде снижения осуществляются последовательно друг за другом.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВЫХОДЕ НА ЛИНИЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2003 |
|
RU2240589C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАХОДОМ НА ПОСАДКУ | 1991 |
|
RU1823356C |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ НА ЭТАПЕ СТАБИЛИЗАЦИИ ВЫСОТЫ КРУГА | 2018 |
|
RU2703378C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| US 20200058225 A1, 20.02.2020. | |||

