Изобретение относится к области оптических измерений трехмерных координат, параметров положения и деформации объектов в пространстве методом видеограмметрии и может применяться в научных исследованиях и производственных испытаниях для бесконтактных измерений геометрических параметров линейного и углового движения исследуемых вращающихся объектов, например, лопастей воздушных винтов, несущих винтов вертолета, промышленных вентиляторов или винтов ветрогенераторов.
Известен метод видеограмметрии, в настоящее время широко применяемый для измерений геометрических параметров в промышленности и научных исследованиях (В.П. Кулеш. Особенности применения видеограмметрии в экспериментальной аэродинамике. // Измерительная техника, 2018, 11, сс. 34 39.), который основан на формировании и цифровой регистрации центральной проекции трехмерного объекта на плоскость в виде изображения. Суть метода состоит в регистрации с помощью цифровой камеры изображения объекта исследования, измерения двухмерных координат u,v выделенных точек объекта на цифровом изображении и вычислении трехмерных пространственных координат x,y,z точек объекта в пространстве по формулам центральной проекции:
 , (1)
, (1)
где: x0,y0,z0 - пространственные координаты центра проекции (центра объектива камеры) в измерительной системе координат, u0,v0,w0 - координаты начала системы координат изображения в системе координат камеры, Mij (i,j = 1,2,3) - элементы матрицы 3×3 направляющих косинусов углов поворота системы координат камеры в системе координат объекта.
Для разрешения принципиальной неопределенности задачи восстановления трех координат точек в пространстве по двум координатам в плоскости изображения (два уравнения (1) с тремя неизвестными) чаще всего применяют метод стереограмметрии, в котором недостающие уравнения получают, комбинируя данные из двух изображений. Для реализации этого метода необходимо применять две цифровые камеры, разнесенные в пространстве на заданное расстояние, стереобазу. Другой путь разрешения неопределенности задачи реализуется в методе монограмметрии, с применением только одной цифровой камеры. Недостающая информация в нем привлекается из сторонних источников.
Благодаря своей бесконтактности и информативности, методы видеограмметрии наиболее эффективны в измерениях параметров движения и деформации вращающихся объектов таких, например, как лопасти воздушных винтов, вентиляторов, ветрогенераторов и др. В мировой практике известны различные варианты применения оптических методов для бесконтактного измерения параметров движения вращающихся объектов, в частности:
- Системы (устройства) с неподвижным по отношению к вращающемуся объекту расположением камер («удаленная» схема). Аналогом такого устройства может служить, например, устройство по способу измерений координат точек объекта в пространстве (патент RU 2749654, МПК G01B 11/16, опубликовано: 16.06.2021 Бюл. № 17).
- Системы с камерами, закрепленные на втулке винта и вращающимися вместе с винтом («встроенные» схемы).
Для измерения формы движения и деформации в полном азимутальном угле «удаленная» система должна настраиваться на весь диск вращения лопасти. Поэтому размер поля зрения H, с учетом возможных смещений лопасти, обычно должен приблизительно в полтора раза превышать диаметр D винта (H≈1,5D). Исходя из того, что приведенная к размеру поля зрения H погрешность метода видеограмметрии гарантированно составляет не более δ=1⋅10-4, можно оценить абсолютную погрешность измерения линейных перемещений системами этого типа величиной Δy=δ⋅Н≈1,5⋅δ⋅D. Например, у вертолета типа «Ансат» диаметр винта равен 11,5 м, а хорда лопасти около 300 мм. При этом поле зрения Н, как показывают расчеты, должно составлять около 15 м. Абсолютная погрешность измерения составит около 1,5 мм, а погрешность измерения угла кручения лопасти 0,3°. Этой точности в задачах современного аэродинамического эксперимента недостаточно.
Системы с камерами, закрепленные на втулке винта и вращающимися вместе с винтом («встроенные» схемы). Для камеры, вращающейся вместе с лопастью, нет необходимости охватывать весь диск вращения, а достаточно охватить только диапазон махового движения. Поле зрения можно уменьшить в несколько раз. Для рассматриваемого случая вертолета «Ансат» диапазон махового движения на конце лопасти не превышает 700 мм, и, как показывают расчеты, поле зрения можно сократить до величины 2 м и меньше. При этом погрешность измерения линейных перемещений может быть уменьшена до 0,2 мм, а угловых до 0,05°, что соответствует уменьшению погрешности в 5-8 раз по сравнению с системами с неподвижным расположением камер вне винта. Поэтому для предложенного изобретения была предложена «встроенная» схема.
Наиболее близким техническим решением, выбранным в качестве прототипа, является «встроенная» видеограмметрическая система измерения движения и деформации вращающейся лопасти несущего винта вертолета с расположением камер на втулке («Optical Rotor-Blade Deformation Measurements using a Rotating Camera№, Fritz Boden, Boleslaw Stasicki, Krzysztof Ludwikowski, The European Test and Telemetry Conference - ettc2018). Система построена по методу стереограмметрии, а для измерения смещений точек изображения применен принцип корреляции изображений нерегулярной структуры оптически контрастных реперов, нанесенной на контролируемую поверхность. Описанное устройство содержит фактически две отдельные стереограмметрические системы, одна из которых (две верхние цифровые камеры) «смотрят» на концевую часть поверхности лопасти, а другая (еще две камеры, нижние) на прикорневую часть. Камеры каждой стереопары разнесены в пространстве на заданную стереобазу.
Описанное устройство содержит основание (camera mounting support), жестко закрепленное на валу вращающегося объекта, на котором смонтированы цифровые камеры (cameras), направленные на контролируемую поверхность вращающегося объекта, блок синхронизации (multiphaser), подключенный своим выходом к входу блока синхронизации (trigger) цифровой камеры, отметчик азимута (1/rev), механически связанный с валом вращающегося объекта, и подключенный своим выходом к входу блока синхронизации, а также структуру оптически контрастных реперов (IPCT pattern), нанесенных на контролируемую поверхность и вычислительную систему регистрации и обработки цифровых изображений В описанном устройстве реперы выполнены в виде контрастных пятен, расположенных нерегулярно по всей поверхности объекта.
Недостатками описанного устройства являются следующие обстоятельства:
- Построение системы по схеме стереограмметрии предполагает применение по меньшей мере двух цифровых камер, разнесенных в пространстве на заданную стереобазу, а применение принципа корреляции изображений требует качественного воспроизведения на цифровых изображениях нерегулярной мелкомасштабной структуры, нанесенной на контролируемую поверхность, что потребовало располагать камеры высоко над поверхностью. При этом для охвата всей поверхности потребовалось использовать две отдельные стереограмметрические системы, настроенные одна на ближний, а другая на дальний ее участок. Вот почему в устройстве прототипе применены четыре камеры, разнесенные в пространстве на значительное расстояние. Обеспечить жесткое крепление камер достаточно сложно. Это делает устройство очень чувствительным к вибрациям, неизбежно присутствующим на вращающемся объекте.
- Более того, высокое расположение камер над контролируемой поверхностью уменьшает поле зрения камер в направлении махового движения объекта (лопасти), что ограничивает диапазон измерения этого параметра.
- Работа системы синхронизации (multiphaser) в устройстве прототипе построена по принципу дробления интервала времени между импульсами отметчика азимута (1/rev - один импульс за оборот), т.е. периода вращения объекта. Это может приводить к заметной погрешности в определении угла азимута при непостоянной скорости вращения, особенно при медленном вращении.
Техническим результатом предлагаемого изобретения являются повышение технических характеристик измерительной системы, в частности, точности измерений, увеличение диапазона измерения перемещений махового движения, расширение диапазона скорости вращения и однозначная привязка результатов измерения к заранее заданным точкам и сечениям контролируемой поверхности.
Технический результат достигается тем, что в устройство для измерения геометрических параметров движения и деформации вращающихся объектов, содержащее снование, жестко закрепленное на валу вращающегося объекта, на котором смонтированы цифровая камера, направленная на контролируемую поверхность вращающегося объекта, и блок синхронизации, подключенный своим выходом к входу синхронизации цифровой камеры, отметчик азимута, механически связанный с валом вращающегося объекта, и подключенный своим выходом к входу блока синхронизации, а также систему оптически контрастных реперов, нанесенную на контролируемую поверхность вращающегося объекта, и вычислительную систему регистрации и обработки цифровых изображений, согласно изобретению дополнительно введены импульсный источник света, закрепленный также на валу вращающегося объекта и направленный на контролируемую поверхность, а также расположенный отдельно датчик углового положения, механически связанный с валом вращающегося объекта, при этом блок синхронизации выполнен в виде логического сепаратора импульсов, входы которого подключены к выходам отметчика азимута, датчика углового положения и выхода сигнала готовности цифровой камеры, а выход блока синхронизации соединен с импульсным источником света и входом синхронизации цифровой камеры, к тому же система контрастных реперов выполнена в виде набора отдельных вертикальных светоотражателей, установленных на контролируемую поверхность вращающегося объекта группами в заранее заданных сечениях, а вычислительная система регистрации и обработки цифровых изображений дополнена модулем идентификации образов локальных светоотражателей.
Работа предложенного устройства для бесконтактного измерения геометрических параметров движения и деформации вращающихся объектов иллюстрируется на примере устройства для измерения параметров движения и деформации лопасти вращающегося несущего винта вертолета. Перечень фигур, иллюстрирующих работу предложенного устройства:
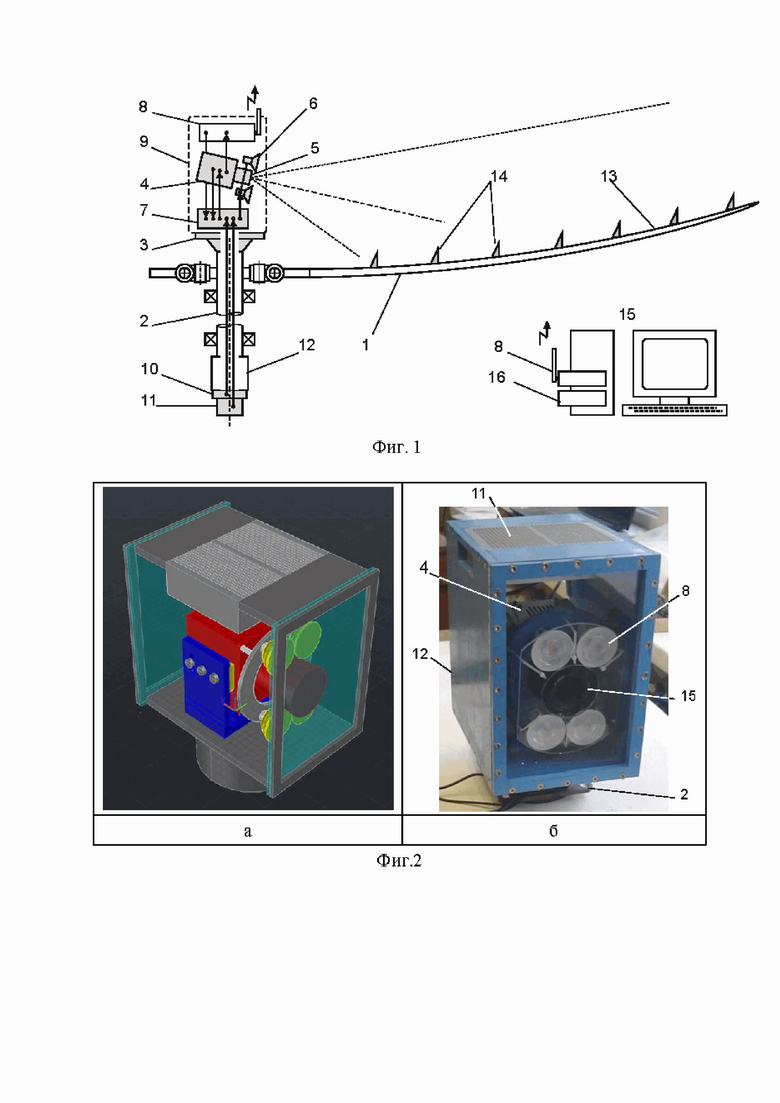
На фиг. 1 приведена структурная схема возможного варианта предложенного устройства для измерения геометрических параметров движения и деформации вращающегося объекта.
На фиг. 2 приведены конструктивная проекция (а) и фотография (б) части устройства на основании, устанавливаемой на втулке несущего винта вертолета.
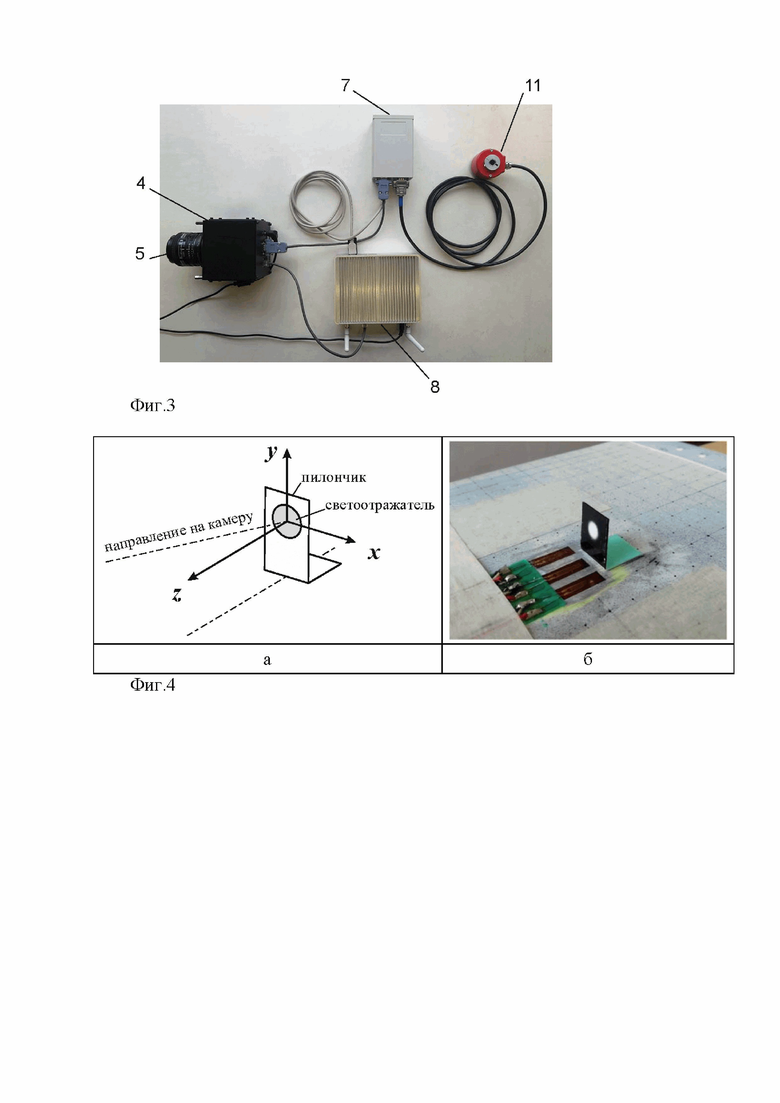
На фиг. 3 показан вид основных составных частей устройства (без основания и источника сосредоточенного света).
На фиг. 4 схематически показаны возможная конструкция предложенного локального вертикального контрастного репера в виде углового пилончика с размещенным на его вертикальной поверхности круглым световозвращающим элементом (а) и пример установки его на контролируемой поверхности исследуемого объекта (б).
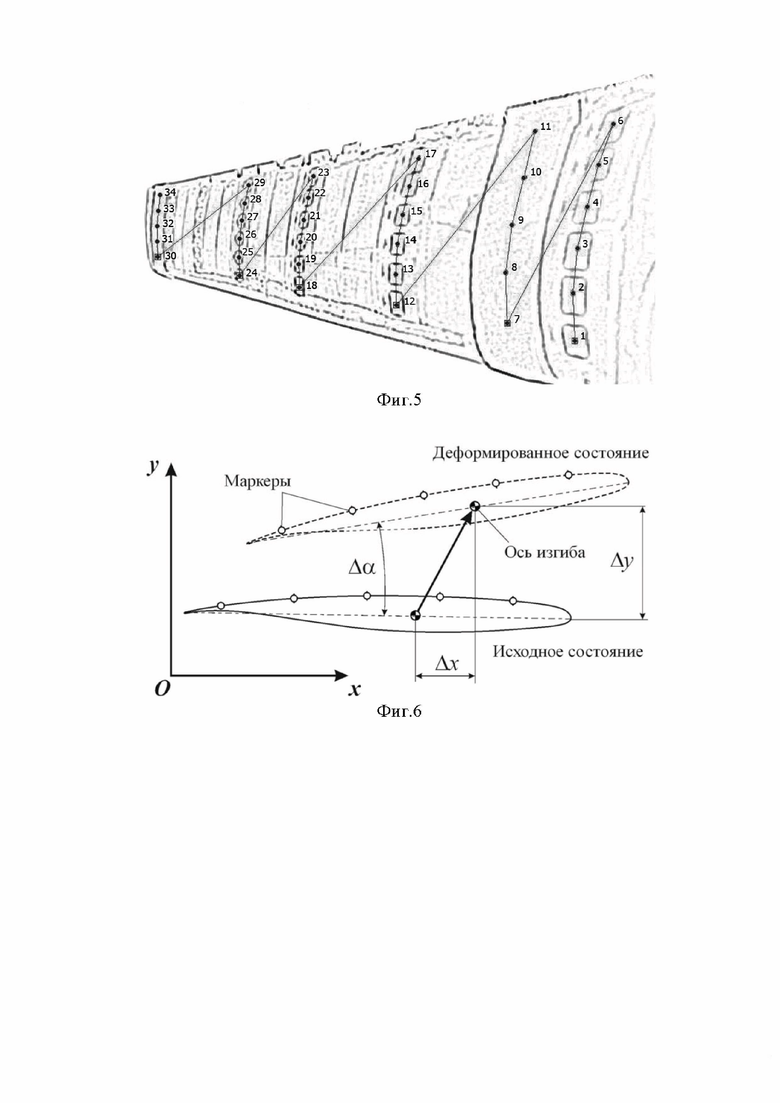
На фиг. 5 приведен пример выполнения идентификации образов локальных реперов на изображении модулем 16.
На фиг. 6 показана схема определения обобщенных параметров деформации изгиба и кручения лопасти в заданном сечении.
На фиг. 7 показан вид в аэродинамической трубе экспериментальной установки для испытания несущего винта вертолета с предложенным устройством для бесконтактного измерения геометрических параметров движения и деформации вращающихся объектов
Работа предложенного устройства рассмотрена в варианте системы для измерения геометрических параметров движения и деформации лопасти вращающегося несущего винта вертолета, схема которой показана на фиг.1. На схеме показаны: 1 - вращающийся объект исследования, в частности, исследуемая лопасть несущего винта вертолета, 2 - вал вращающегося объекта, винта, 3 - основание, жестко соединенное с валом вращающегося объекта, 4 - цифровая камера, 5 - приемный объектив камеры, 6 - импульсный (стробоскопический) источник света, 7 - блок синхронизации, выполненный в виде логического сепаратора импульсов, 8 - модуль беспроводной связи, 9 - защитный корпус, 10 - отметчик азимута, 11 - датчик углового положения (энкодер), 12 - токосъемник, 13 - контролируемая поверхность с системой контрастных реперов, 14 - набор локальных вертикальных светоотражателей, 15 - вычислительная система регистрации и обработки цифровых изображений, 16 - модуль идентификации локальных светоотражателей на изображениях.
Основание 3 с установленными узлами 4-8 в защитном корпусе 9 представляет собой измерительную головку, жестко устанавливаемую на вал 2 вращающегося объекта и вращающуюся вместе с ним. Цифровая камера 4 и импульсный стробоскопический источник света 6 направлены на контролируемую поверхность 13 вращающегося объекта. Помимо измерительной головки устройство содержит отметчик азимута 10 и датчик углового положения (энкодер) 11, установленные отдельно неподвижно, но механически связанные с валом 2 вращающегося объекта. Электрическая связь этих элементов с блоком синхронизации 7 осуществляется посредством токосъемника 12. На контролируемой поверхности 13 в заданных местах по сечениям группами по 5-7 установлены локальные вертикальные светоотражатели 14. Устройство содержит также вычислительную систему 15 регистрации и обработки цифровых изображений на базе персонального компьютера, размещаемую в кабине управления, и связанную с вращающейся измерительной головкой посредством модулей 8 беспроводной связи. Система 15 регистрации и обработки цифровых изображений дополнена вычислительным модулем 16 идентификации локальных светоотражателей на изображениях.
На фиг. 2 показаны конструктивная сборка и фотография макетного образца измерительной головки, устанавливаемой на вал несущего винта вертолета, а на фиг. 3 вид основных составных частей устройства (без основания и источника сосредоточенного света).
Предложенный отдельный вертикальный светоотражатель может быть выполнен в виде углового пилончика с размещенным на его вертикальной поверхности круглым световозвращающим элементом (фиг. 4а). Диаметр круглого световозвращающего элемента D следует рассчитывать таким, чтобы диаметр пятна на изображении составлял от 7 до 10 пикселей. Пример установки его на контролируемой поверхности исследуемого объекта приведен на фиг. 4б.
Предлагаемое устройство для измерения геометрических параметров движения и деформации лопасти вращающегося несущего винта вертолета работает следующим образом. Предварительно в память логического сепаратора импульсов блока 7 синхронизации от системы 15 регистрации и обработки цифровых изображений заносятся основные параметры режима измерений, в частности, последовательность значений угла азимута (или интервал), при которых следует выполнять отсчеты, и число оборотов накопления данных. По команде запуска цикла измерений, поступившей от системы 15 регистрации и обработки цифровых изображений, блок синхронизации переходит в состояние ожидания сигнала от отметчика азимута 10. Цифровая камера находится в состоянии готовности выполнить отсчет. По приходу сигнала от отметчика азимута логический сепаратор импульсов устанавливает в ячейку сравнения первое значение угла азимута из установленной последовательности и переходит в состояние сравнения цифрового кода от датчика углового положения со значением в ячейке сравнения. В момент совпадения вырабатывается импульс пуска, поступающий на вход синхронизации цифровой камеры и вход пуска импульсного источника света. Производится регистрация цифрового изображения, а логический сепаратор импульсов устанавливает в ячейку сравнения очередное значение угла азимута из установленной последовательности (увеличением на один расчетный шаг) и переходит в состояние ожидания сигнала готовности цифровой камеры. Когда камера оказывается готовой, логический сепаратор импульсов переходит в состояние сравнения цифрового кода от датчика углового положения со значением в ячейке сравнения. Затем операция многократно повторяется, пока не будет накоплен заданный объем данных. При этом, если максимальная частота регистрации камеры не меньше необходимой частоты отсчетов, то отсчеты могут быть выполнены в пределах одного оборота. В противном случае отсчеты будут выполняться в разные периоды вращения, и серия отсчетов одного цикла займет несколько оборотов.
В момент срабатывания импульсного источника 6 свет, отразившись от расположенных на контролируемой поверхности лопасти локальных светоотражателей 14, воспринимается приемным объективом цифровой камеры, образуя контрастные локальные образы реперов, хорошо различимые на цифровом изображении. Цифровое изображение регистрируется по тому же сигналу от блока синхронизации. Перемещение реперов по координатам x,y в пространстве, вызванное деформацией вращающегося объекта, приведет к изменению координат u,v локальных образов на изображении. Цифровые изображения посредством системы (двух модулей 8) беспроводной связи передаются с вращающегося объекта в вычислительную систему 15 регистрации и обработки цифровых изображений. С помощью дополнительного модуля 16 осуществляется идентификация образов локальных светоотражателей и измерение двухмерных координат u,v их центров на изображении. С помощью вычислительной системы регистрации и обработки цифровых изображений 15 по формулам (1) определяются мгновенные координаты x,y локальных светоотражателей в пространстве, распределенные по заданным сечениям на контролируемой поверхности 13. Итогом этой процедуры являются двухмерные координаты u,v центров образов локальных реперов, распределенных по сечениям с заданными при разметке и установке локальных вертикальных светоотражателей значениями координаты z. Результат функционирования модуля 16 идентификация образов локальных светоотражателей на изображении лопасти несущего винта вертолета иллюстрируется на фиг. 5 (негатив).
Такие измерения выполняются первоначально при исходном состоянии объекта в отсутствие внешних воздействий, без вращения. Получают значения множества координат {x,y} недеформированного состояния для каждого заданного сечения. В ходе испытаний в каждый момент времени для каждого заданного сечения получают соответствующее множество значений координат {x′,y′} всех измеряемых точек в текущем деформированном состоянии. Вычисления параметров деформации изгиба и кручения выполняются для каждого заданного сечения по множеству (5-7) точек измерения в нем путем совмещения методом наименьших квадратов координат {x, y} всех измеряемых точек сечения в исходном недеформированном состоянии с координатами тех же точек в текущем деформированном состоянии {x′,y′} (фиг. 6). Величины деформации изгиба Δx и Δy должны быть определены как смещения по координатам осевой точки сечения, а параметр деформации кручения Δα как поворот маркеров сечения вокруг этой точки по формулам

Символ ⇔ обозначает здесь процедуру решения регрессии методом наименьших квадратов. Среднеквадратические отклонения по осям при совмещении методом наименьших квадратов могут служить хорошим индикатором результирующей погрешности измерений, включающей как инструментальную погрешность измерительной системы, так и влияние внешних возмущающих факторов.
На фиг. 7 приведена фотография экспериментальной установки в большой дозвуковой аэродинамической трубе, предназначенной для испытаний натурных несущих винтов вертолета. Установка оснащена предложенным устройством для измерения геометрических параметров движения и деформации лопасти вращающегося винта. На втулке винта можно видеть измерительную головку, настроенную на измерение параметров деформации лопасти, окрашенной для обеспечения максимальной контрастности изображения реперов в черный цвет.
В изобретении предположено построить схему измерительной системы по методу монограмметрии с применением одной только цифровой камеры, структуру оптически контрастных реперов сформировать в виде набора локальных реперов, расположенных на контролируемой поверхности регулярно по заранее рассчитанной схеме группами по нескольку в заранее заданных сечениях, а сами реперы выполнить в виде отдельных вертикальных светоотражателей с регулируемой по углу рабочей поверхностью, на которую нанесены светоотражающие метки расчетного размера.
Техническим результатом изобретения является:
- Повышение точности измерения геометрических параметров движения и деформации за счет уменьшения чувствительности системы к механическим вибрациям, т.к. жестко закрепить одну камеру много легче, чем две или четыре разнесенные в пространстве камеры, и вибрации одной камеры вносят много меньший вклад в ошибку измерения, чем колебания двух и более камер.
- Увеличение диапазона измерения параметров махового движения (перпендикулярно плоскости вращения) за счет уменьшения угла наблюдения контролируемой поверхности и большего охвата полем зрения одной камеры диапазона махового движения.
- Расширение диапазона скорости вращения объекта. В направлении уменьшения скорости вращения эффект достигается возможностью управляемого дробления непосредственно угла азимута, а не периода вращения. Это наиболее ярко проявляется при изменении скорости вращения на малых оборотах при раскрутке или торможении вращающегося объекта. В сторону увеличения скорости вращения эффект обеспечивается возможностью выполнять отсчеты измерений не в пределах одного оборота, а выборочным распределением значений заданного ряда углов азимута по разным оборотам. Это позволяет проводить измерения даже когда частота вращения объекта превосходит частоту регистрации изображений камерой.
- Дополнительным техническим эффектом является то, что результаты измерения однозначно привязаны к заранее заданным точкам и сечениям контролируемой поверхности, в которых установлены узлы отдельных контрастных реперов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерений координат точек объекта в пространстве | 2020 |
|
RU2749654C1 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| Способ определения с субпиксельной точностью пиксельных координат центра лазерного пятна маломощного лазера | 2024 |
|
RU2834963C1 |
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА | 2009 |
|
RU2413250C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
| Способ измерения пространственных координат точек объекта с высокой продольной жёсткостью | 2024 |
|
RU2835117C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2439519C1 |
Изобретение относится к области оптических измерений трехмерных координат, параметров положения и деформации объектов в пространстве методом видеограмметрии и может применяться в производственных испытаниях для бесконтактных измерений геометрических параметров линейного и углового движения исследуемых вращающихся объектов, например лопастей воздушных винтов, винтов вертолета, промышленных вентиляторов или винтов ветрогенераторов. Технический результат - повышение точности измерений, увеличение диапазона измерения и расширение диапазона скорости вращения. Устройство содержит основание, жестко закрепленное на валу вращающегося объекта, на котором смонтированы цифровая камера, блок синхронизации, отметчик азимута, а также систему оптически контрастных реперов, выполненную в виде набора отдельных вертикальных светоотражателей, нанесенную на контролируемую поверхность вращающегося объекта, и вычислительную систему регистрации и обработки цифровых изображений, дополнительно введены импульсный источник света, а также расположенный отдельно датчик углового положения, механически связанный с валом вращающегося объекта, при этом блок синхронизации выполнен в виде логического сепаратора импульсов, а вычислительная система регистрации и обработки цифровых изображений дополнена модулем идентификации образов локальных светоотражателей. 7 ил.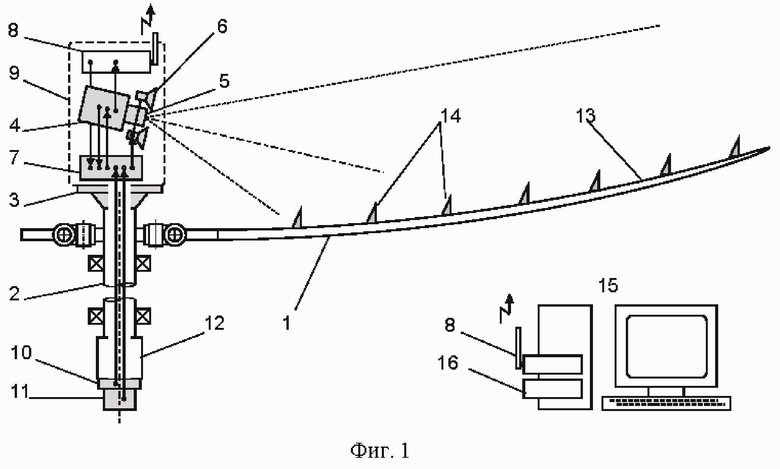
Устройство для измерения геометрических параметров движения и деформации вращающихся объектов, содержащее основание, жестко закрепленное на валу вращающегося объекта, на котором смонтированы цифровая камера, направленная на контролируемую поверхность вращающегося объекта, и блок синхронизации, подключенный своим выходом к входу синхронизации цифровой камеры, отдельно расположенный отметчик азимута, механически связанный с валом вращающегося объекта и подключенный своим выходом к входу блока синхронизации, а также систему оптически контрастных реперов, нанесенную на контролируемую поверхность вращающегося объекта, и вычислительную систему регистрации и обработки цифровых изображений, отличающееся тем, что в устройство дополнительно введены импульсный источник света, закрепленный также на валу вращающегося объекта и направленный на контролируемую поверхность, а также расположенный отдельно датчик углового положения, механически связанный с валом вращающегося объекта, при этом блок синхронизации выполнен в виде логического сепаратора импульсов, входы которого подключены к выходам отметчика азимута, датчика углового положения и выхода сигнала готовности цифровой камеры, а выход блока синхронизации соединен с импульсным источником света и входом синхронизации цифровой камеры, к тому же система контрастных реперов выполнена в виде набора отдельных вертикальных светоотражателей, установленных на контролируемую поверхность вращающегося объекта группами в заранее заданных сечениях, а вычислительная система регистрации и обработки цифровых изображений дополнена модулем идентификации образов локальных светоотражателей.
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2308676C2 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| JP 2002318108 A, 31.10.2002 | |||
| CN 104197855 A, 10.12.2014 | |||
| CN 205228397 U, 11.05.2016. | |||

